Distance Field Rasterization for End-to-End Mesh Reconstruction
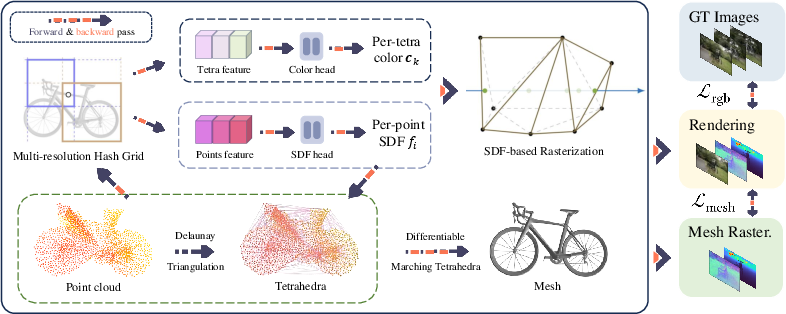
Abstract: Rasterization based methods have recently enabled high-quality novel view synthesis at real-time rates, but their underlying volumetric primitives do not expose a direct, globally consistent surface representation, leaving sur face extraction to heuristic post-processing. In contrast, implicit signed dis tance field (SDF) methods provide well-defined surfaces but are typically optimized with computationally expensive ray marching. We propose SD FRaster, a rasterizable SDF representation that bridges this gap by combin ing the efficiency of rasterization with signed distance field for end-to-end mesh reconstruction. Starting from a Delaunay tetrahedralization, we op timize a continuous SDF over a tetrahedral grid and render it efficiently by rasterizing tetrahedra and alpha-compositing their contributions. We further integrate differentiable Marching Tetrahedra into the optimization loop, enablingend-to-endmeshreconstructionwithoutpost-processingmesh extraction. Experiments on DTU and Tanks and Temples demonstrate that SDFRaster achieves higher-quality and more complete surface reconstruc tions with lower storage cost than state-of-the-art approaches. Project page: https://ustc3dv.github.io/SDFRaster/

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Distance Field Rasterization for End-to-End Mesh Reconstruction — Explained Simply
1) What is this paper about?
This paper presents a new way to build 3D models (triangle meshes) from a bunch of photos taken around an object or a scene. The method is called SDFRaster. It aims to be both:
- fast (so it can train and render efficiently), and
- accurate (so the resulting 3D surface is clean and consistent).
It does this by combining two ideas:
- A “distance field,” which tells you how far any point in space is from the surface (the surface is where the distance is exactly zero).
- “Rasterization,” a fast graphics technique used in video games and GPUs to quickly draw shapes on the screen.
2) What are the key questions the paper asks?
The authors focus on solving three simple questions:
- How can we get the speed of graphics-style rendering while still having a clear, mathematically correct surface?
- How can we produce a mesh directly during training instead of doing messy post-processing later?
- How can we keep the 3D model compact (small file size) while capturing fine details?
3) How did they do it? (Simple explanation with analogies)
Think of space as being filled with tiny 3D “pyramids” called tetrahedra (like stacking many little 3D triangles). The method:
- Splits the scene into a network of tetrahedra (this is called a Delaunay tetrahedralization).
- Stores a number at each corner (vertex) of these tetrahedra: the signed distance.
- Positive = outside the object, negative = inside, zero = the surface.
- Inside each tetrahedron, the values are smoothly blended so the distance field is continuous.
- The authors use a small neural network to predict these distance values at vertices, making the field smooth and flexible without evaluating the network everywhere.
To turn this into images and learn from photos:
- They “rasterize” tetrahedra: this is like painting each tiny 3D pyramid onto the camera image very fast, instead of slowly “walking” along each viewing ray step-by-step (which is what “ray marching” would do).
- They convert the distance values into “opacity” (how see-through each part is), then layer the contributions along the camera view like stacking transparent sheets (this is called alpha compositing).
- They also attach simple color information to each tetrahedron, so the model can match the photo colors during training.
To get an actual triangle mesh (the final 3D model):
- They use a process called Marching Tetrahedra to find where the distance field equals zero (that’s the surface).
- They make this step “differentiable,” which means the training can directly improve the mesh while it learns, instead of extracting the mesh only at the end.
To focus detail where it matters:
- The method adapts the tetrahedral grid by splitting tetrahedra near the surface and removing parts that don’t contribute much. This keeps the mesh detailed but compact.
In short:
- Distance field = a smooth math map where the surface is at distance 0.
- Rasterization = fast painting onto images.
- Marching Tetrahedra = turning the distance-0 surface into triangles.
- All of this runs together so the mesh improves continuously during training.
4) What did they find, and why is it important?
The authors test on well-known benchmarks:
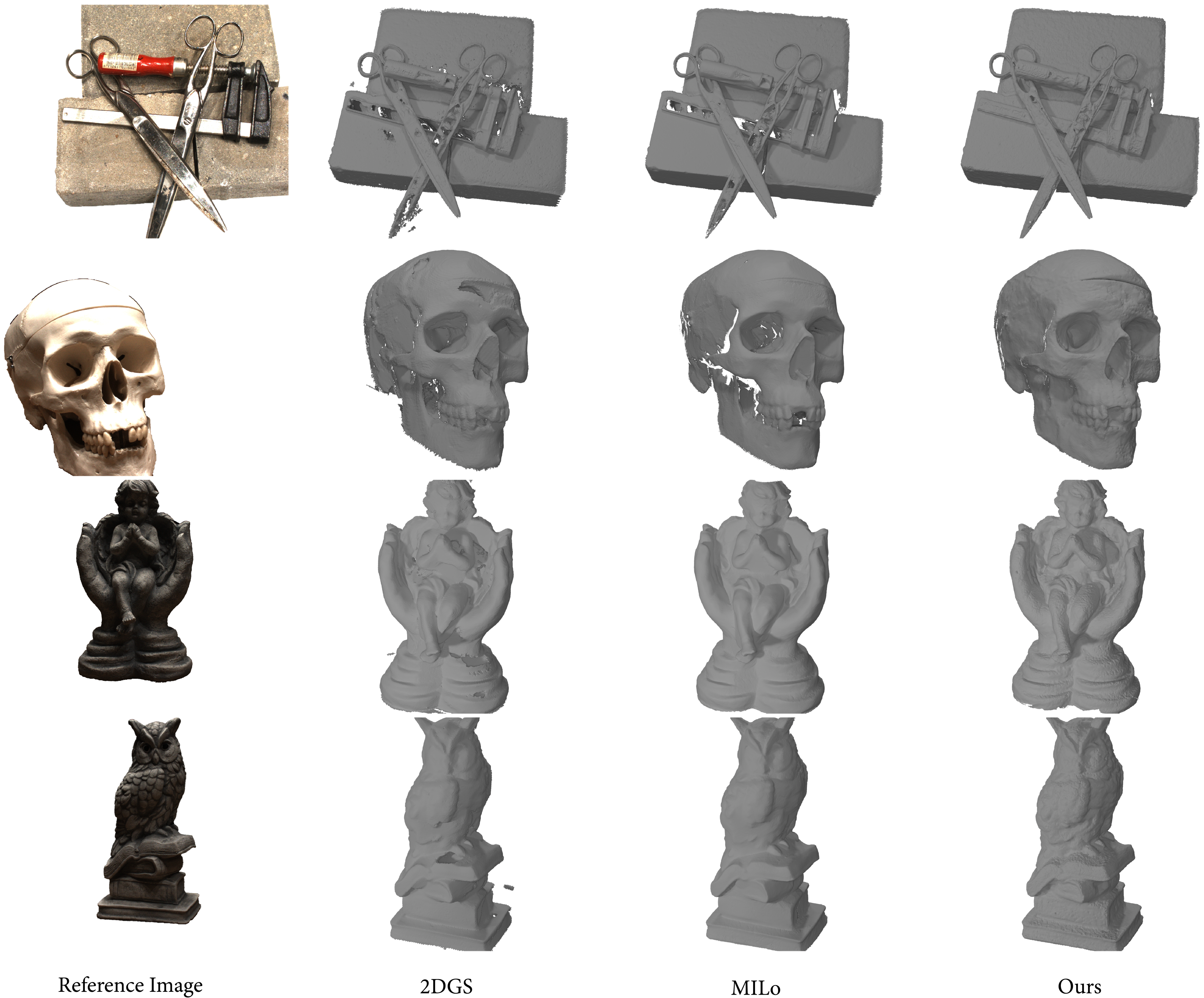
- DTU (objects on a turntable with many photos)
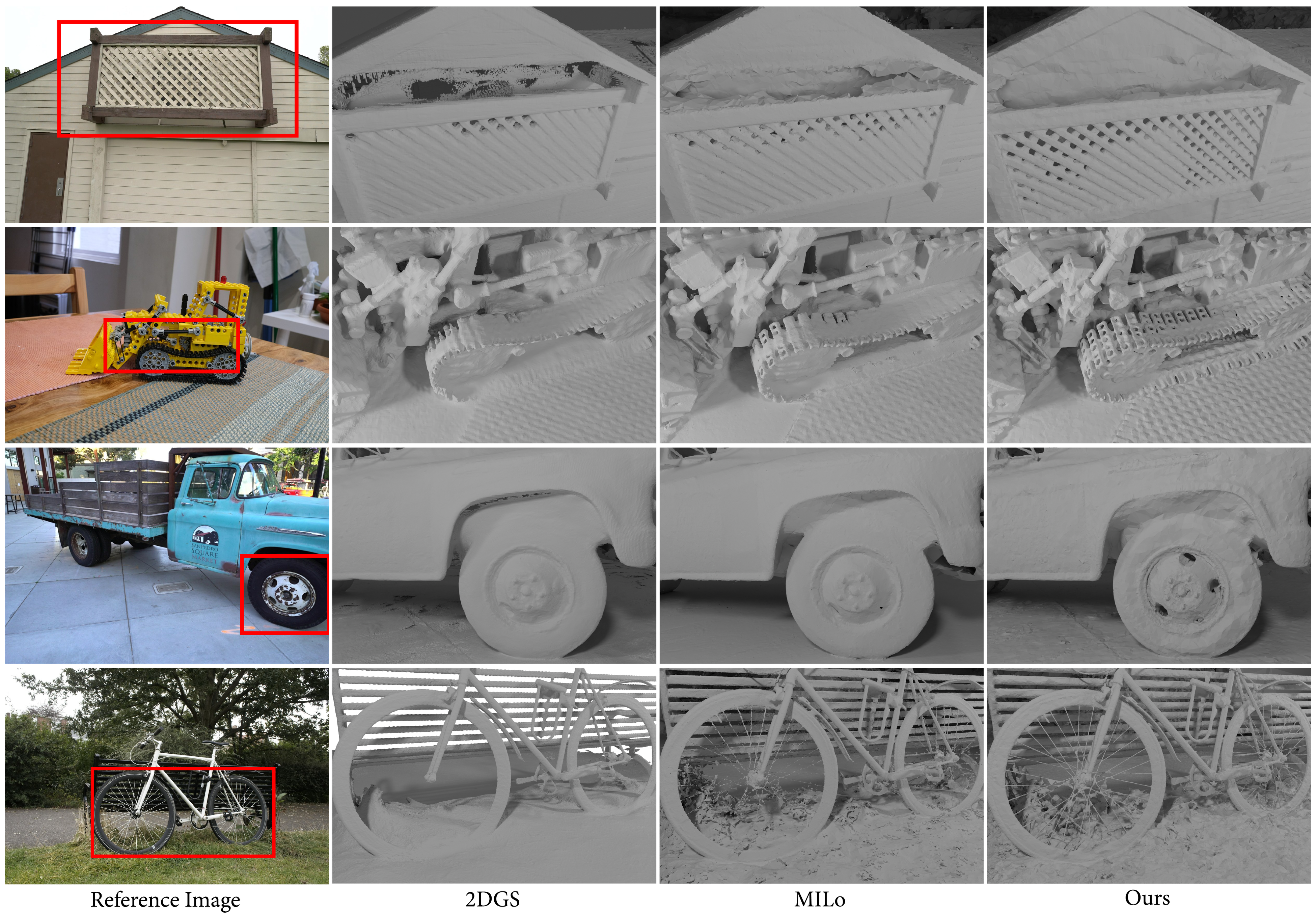
- Tanks and Temples (bigger, real scenes)
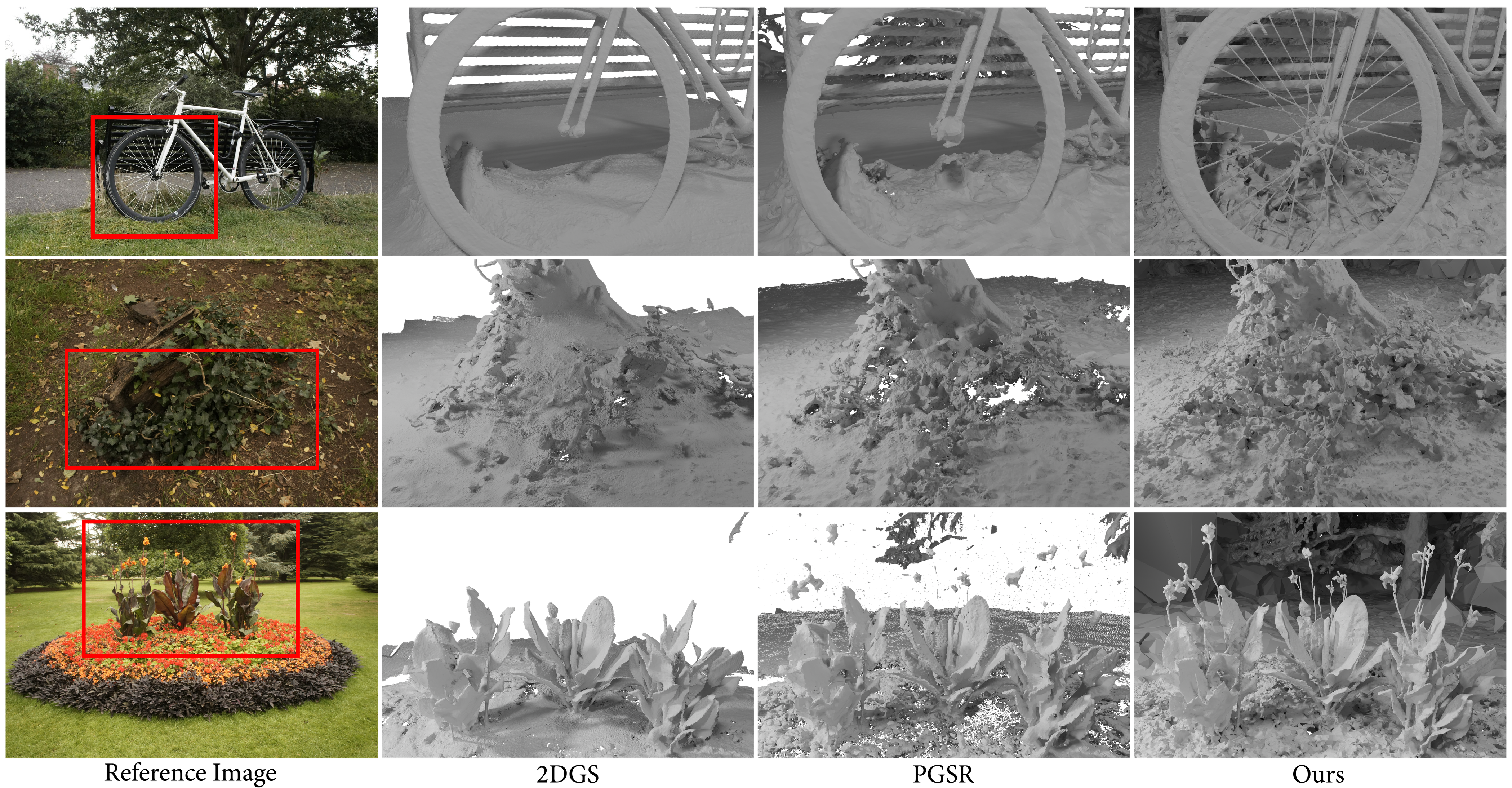
- Mip-NeRF 360 (scenes for view synthesis)
Main results:
- Higher-quality surfaces with fewer holes and better thin structures than many methods that rely on depth-map fusion.
- Faster training than classic “implicit SDF” methods that use slow ray marching (they report over 6× speed-ups in some comparisons).
- More compact meshes (around 3× smaller than those made by common depth-fusion pipelines), which saves storage.
- Competitive rendering quality for new views (not the main goal, but still good).
Why this matters:
- You get a mesh directly, during training, with fewer noisy steps. That means more reliable geometry and less time spent cleaning up.
- It makes high-quality 3D reconstruction more practical for larger or more complex scenes.
5) What’s the impact and what could come next?
This approach shows a promising path: combine the speed of GPU-style rasterization with the clarity of a distance field that defines a surface exactly. That means:
- Faster, scalable 3D reconstruction.
- Clean, consistent meshes ready for animation, simulation, or 3D printing.
- Less dependence on fragile post-processing.
Future improvements the authors mention:
- Store the distance values explicitly (instead of using a small neural network) to make training even faster, while keeping the smoothness with regularization.
Overall, SDFRaster brings together “what runs fast on a graphics card” and “what defines a surface cleanly” to produce better 3D models from photos, quickly and directly.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a consolidated list of concrete gaps and unresolved questions that future work could address.
- Explicit SDF storage vs. hash-MLP: The paper notes MLP query overhead but does not implement or evaluate a fully explicit per-vertex SDF (with explicit smoothness priors). How would such a design affect training speed, memory, mesh quality, and stability during re-tetrahedralization?
- True signed-distance property in unbounded scenes: The Eikonal term is disabled on TnT for convergence, leaving the field not strictly a signed distance function. What alternative regularizers (e.g., band-limited gradient norms, truncated Eikonal, barrier penalties around the zero-set) can preserve SDF properties without hindering convergence?
- Sensitivity of SDF-to-opacity mapping: The NeuS logistic mapping uses a learned global sharpness s. How sensitive are reconstructions to this choice? Would per-cell or spatially varying s improve sharpness/robustness, and how should s be scheduled to avoid band-collapse/over-smoothing?
- Piecewise-linear SDF limitations: The SDF is linear inside each tetrahedron, yielding constant normals per tetra. What are the accuracy limits on high-curvature or thin structures, and can higher-order (quadratic) basis functions or per-face gradient continuity constraints improve smoothness without excessive densification?
- Differentiable Marching Tetrahedra stability: Gradients near topology changes (sign flips, degenerate zero-crossings) can be discontinuous. How to regularize or smooth these events (e.g., via soft sign transitions, margin bands) to stabilize training?
- Intersection/rasterization differentiability: The renderer requires ray–tetrahedron intersections and ordered compositing. Are gradients well-behaved when visibility changes (e.g., due to small geometry moves), and would a soft-visibility or anti-aliased intersection model improve gradient stability?
- Endpoint-only segment integration: Color and opacity are computed from SDF and color at segment endpoints (averaged). What is the bias of this quadrature vs. exact line integrals, especially under strong within-cell color gradients or rapidly changing SDF? Would higher-order quadrature reduce color/geometric bias?
- Adaptive refinement policy: Densification currently uses fixed heuristics (e.g., top 5% surface-crossing tets by circumradius + SSIM/TV error). How sensitive are results to these thresholds and schedules? Can learned or curvature-/uncertainty-driven, anisotropic refinement yield better detail with fewer elements?
- Delaunay re-tetrahedralization overhead: The approach relies on repeated re-tetrahedralization as vertices are inserted and pruned. What is the amortized complexity and runtime impact at scale, and can incremental or localized updates, or robust sliver-removal strategies, improve scalability and mesh quality?
- Initialization of the tetrahedral complex: The procedure for sampling initial vertices (density, distribution, quality control) is not specified. How does initialization affect convergence, element quality (slivers), and final reconstruction accuracy?
- Scalability and acceleration structures: There is no analysis of ray–tet count scaling, BVH/grid acceleration, or out-of-core streaming. What hierarchical data structures or tile-based rasterization schemes would maintain performance on very large scenes (city/block-scale)?
- Memory accounting and trade-offs: Reported mesh sizes exclude hash-grid/MLP parameters and tetrahedral connectivity memory. A full end-to-end memory and compute breakdown (training vs. inference) is missing; how do different design choices (explicit SDF, per-tet attributes, varying encoder sizes) shift this balance?
- Appearance model expressiveness: The per-tetra linear color field with view dependence may be insufficient for complex BRDFs, specularities, and cast shadows. How would physically based or factorized appearance (BRDF + lighting) affect surface recovery and rendering quality?
- Coupling of geometry and appearance encodings: Geometry and appearance share the hash encoder. Does this entanglement harm either task? Would separate or partially shared encoders yield better geometry while preserving NVS quality?
- Normal rendering/consistency bias: Using constant per-tet normals and normal–depth consistency losses may encourage over-densification to reduce piecewise-constant artifacts. Can smoother normal fields (e.g., per-face continuity constraints) or alternative supervision mitigate this bias?
- Curvature regularization definition: The paper uses L_curv = average |∇²f| but does not detail its discrete computation for a piecewise-linear field (whose Laplacian is zero inside a tet). How should curvature be estimated consistently across tet boundaries, and what is its actual effect on surface curvature?
- Robustness to camera/photometric noise: The method assumes calibrated cameras and standard photometric losses. How robust is SDFRaster to pose errors, rolling-shutter, exposure/white-balance variations, or heavy non-Lambertian effects, and can joint pose refinement or photometric calibration improve stability?
- Evaluation breadth and metrics: Beyond CD/F1 and NVS metrics, mesh manifoldness, watertightness, self-intersections, and topology correctness are not reported. How does SDFRaster perform on these geometric quality criteria and under sparse-view or low-texture regimes?
- Fairness and visibility filtering: DTU meshes are culled by masks and TnT by visibility filtering. How sensitive are results to these filters, and are comparisons fully fair when different baselines use different culling/fusion steps?
- Multiple zero-crossings along a ray: The NeuS-style compositing assumes a thin surface. How well does the framework handle multi-layer geometries (e.g., glass), and what extensions are needed for semi-transparent or volumetric media?
- Handling dynamic scenes: The approach targets static scenes. How to extend SDFRaster to non-rigid or dynamic settings (time-varying tetrahedra, topology changes, temporal regularization) while preserving rasterization efficiency?
- Outlier/failure analysis: The paper highlights successes but lacks systematic failure cases (e.g., glossy objects, repetitive textures, heavy occlusion). A diagnostic study would inform where the method degrades and which components (losses, refinement, rendering) are most responsible.
- Comparative gaps with tetra/mesh methods: Direct comparisons to strong mesh/SDF baselines like DMTet/FlexiCubes are missing. How does SDFRaster perform in terms of accuracy, speed, and mesh compactness against these tetra-aware optimizers?
- Training dynamics and schedules: The paper fixes 18k iterations with specific densify/prune cadences. How do alternative schedules (curriculum on s, adaptive pruning thresholds, dynamic loss weights) affect convergence speed and final quality?
- Anti-aliasing and prefiltering: The rasterizer lacks a discussion of prefiltered rendering for subpixel geometry/texture. Would analytically anti-aliased color/opacity improve both NVS metrics and geometric fidelity?
- Robustness of culling/pruning decisions: The hard thresholds (O_max < 0.1, |f| > ℓ(s), contribution τ_c) are non-differentiable and may cause oscillations. Can soft gating or uncertainty-aware pruning reduce instability and accidental removal of useful cells?
- Practical throughput: Although training times are reported, real-time or near-real-time inference rates (fps) after convergence are not. What is the rendering throughput as a function of tet count and image resolution, and how does it compare to 3DGS-based pipelines?
- Zero-level set calibration: Without strict SDF constraints, the absolute scale of f can drift. Are additional constraints needed (e.g., sampling-based re-scaling, band clamping) to keep the zero-set sharp and stable across scenes?
Practical Applications
Immediate Applications
The following applications can be deployed today using the paper’s methods and reported performance characteristics (single-GPU training, 98 minutes for object-centric scenes, ~6 hours for complex scenes; high-quality, compact, watertight meshes; no TSDF post-fusion).
- 3D asset reconstruction for VFX, games, and XR
- Sector: Media/Entertainment, Software
- Use case: Replace TSDF-fusion photogrammetry steps with end-to-end SDFRaster for faster, cleaner, watertight mesh extraction from calibrated multi-view photos; export compact meshes for Unreal/Unity pipelines.
- Tools/products/workflows: “SDFRaster Photogrammetry Engine” plugin for COLMAP/Metashape/RealityCapture; batch asset conversion service with mesh compression and LOD generation.
- Assumptions/dependencies: Calibrated multi-view images (e.g., via COLMAP); static scenes; GPU with modern rasterization capabilities; adequate image coverage/lighting.
- E-commerce product digitization and web 3D viewers
- Sector: Retail/Commerce, Web Visualization
- Use case: Quickly turn smartphone multi-view captures into compact, watertight meshes that load fast in web viewers and reduce CDN/storage cost.
- Tools/products/workflows: “SDFRaster-to-glTF” converter with automatic decimation and texture baking; web pipeline integrating Draco/meshopt.
- Assumptions/dependencies: Reliable camera pose estimation; good background separation and coverage; static products.
- AEC site capture and BIM pre-processing
- Sector: Architecture, Engineering, Construction
- Use case: Drone/handheld image capture of rooms/facades to generate compact meshes that preserve sharp edges and thin structures, improving downstream scan-to-BIM.
- Tools/products/workflows: Field-to-BIM pipeline that exports aligned meshes for CAD/BIM tools (Revit, Rhino); QA dashboards comparing as-built to design.
- Assumptions/dependencies: Calibrated images; static scenes; scale anchoring (fiducials or surveyed references).
- Cultural heritage and archaeology digitization
- Sector: Cultural Heritage, Public Sector
- Use case: Produce more complete, watertight meshes from museum or site photography with fewer holes and smaller storage footprints.
- Tools/products/workflows: Curatorial mesh archive pipeline with verifiable provenance and versioning; automated thin-structure preservation settings.
- Assumptions/dependencies: Sufficient multi-view coverage; conservative lighting; permissions and metadata practices.
- Manufacturing inspection and reverse engineering
- Sector: Manufacturing, QA/Metrology
- Use case: Turntable or robot-captured images yield watertight meshes for dimensional checks against CAD, improving thin-feature fidelity over depth-fusion approaches.
- Tools/products/workflows: “Scan-to-CAD Deviation” tool that color-codes errors on SDFRaster meshes; CAD interoperability via STEP/IGES export after mesh fitting.
- Assumptions/dependencies: Precise calibration and scale; controlled lighting/background; static parts.
- Robotics workcell mapping (offline)
- Sector: Robotics, Automation
- Use case: Build SDF-backed meshes of static workcells for collision checking, path planning, and simulation; compact meshes reduce memory for embedded deployment.
- Tools/products/workflows: Export triangle meshes + signed-distance queries to MoveIt/OMPL; integration with physics engines (e.g., PhysX/Bullet).
- Assumptions/dependencies: Static scenes; metric scale; camera calibration; offline reconstruction before deployment.
- Digital twins for facilities and industrial assets
- Sector: Industrial IoT, Operations
- Use case: Generate compact, watertight meshes for digital twins that are easier to stream, archive, and simulate than dense TSDF-derived meshes.
- Tools/products/workflows: “Capture-to-Twin” pipeline that outputs compact geometry layers with versioning and change tracking.
- Assumptions/dependencies: Adequate multi-view image coverage; scene staticity; governance for data management.
- Academic research and teaching in inverse graphics
- Sector: Academia/Education
- Use case: Use SDFRaster as a fast, differentiable testbed to study geometry learning, coupling field and mesh losses (e.g., curricula on SDFs, Marching Tetrahedra, differentiable rendering).
- Tools/products/workflows: Course labs, open-source benchmarks, ablation frameworks; reproduction of paper’s losses and adaptive strategies.
- Assumptions/dependencies: GPUs and dataset availability; familiarity with PyTorch/SlangD.
- Lower-cost, greener cloud reconstruction services
- Sector: Cloud/IT, Sustainability
- Use case: Reduce compute hours and storage per scene versus implicit SDF methods, cutting cost and energy for large-scale asset pipelines.
- Tools/products/workflows: Cost/energy dashboards; autoscaling reconstruction service selecting SDFRaster for mesh-centric jobs.
- Assumptions/dependencies: Comparable capture quality; containerized GPU infrastructure; integration with existing MVS calibration.
- Graphics/vision interoperability: bridging view synthesis and geometry
- Sector: Software/Research
- Use case: Replace “depth-fusion after training” in Gaussian-splat pipelines with SDFRaster to directly extract meshes during optimization.
- Tools/products/workflows: Hybrid pipelines where photo sets feed SDFRaster for geometry while 3DGS handles fast view synthesis; shared scene bounds and masks.
- Assumptions/dependencies: Calibrated images; pipeline integration effort; managing color/view-dependence differences.
Long-Term Applications
These require further research, engineering, scaling, or new hardware (as acknowledged in the paper’s limitations and future work, e.g., moving from hash-MLP to fully explicit fields, handling unbounded/dynamic scenes, and pushing toward on-device real time).
- On-device, real-time AR scene reconstruction
- Sector: XR/Consumer Devices
- Use case: Live, end-to-end watertight mesh reconstruction on AR glasses/phones for occlusion, anchoring, and physics.
- Tools/products/workflows: Mobile-optimized rasterizable SDF with explicit per-vertex SDF storage (as suggested by the paper’s future work) to reduce network evaluation cost.
- Assumptions/dependencies: Hardware acceleration for rasterization and tetrahedralization on-device; online calibration; streaming densification.
- Online SLAM with SDF-backed surfaces
- Sector: Robotics, Autonomous Systems
- Use case: Integrate SDFRaster-like rasterization with SLAM to maintain a globally consistent surface map updated in real-time for planning and manipulation.
- Tools/products/workflows: Incremental Delaunay tetrahedralization; streaming differentiable Marching Tetrahedra; loop-closure-aware updates.
- Assumptions/dependencies: Robustness to dynamic objects; online pose estimation; real-time constraints.
- Dynamic/non-rigid scene reconstruction
- Sector: Media/Entertainment, Robotics, AR
- Use case: Reconstruct temporally evolving surfaces (people, deforming objects) with end-to-end meshes for animation and tracking.
- Tools/products/workflows: Time-varying tetrahedral grids or deformation models; temporal regularizers; differentiable mesh tracking.
- Assumptions/dependencies: High-frame-rate capture; robust correspondence; regularization for stability.
- City-scale and infrastructure-scale modeling
- Sector: Geospatial, Public Sector, Energy/Utilities
- Use case: Drone fleets capturing large areas; distributed SDF rasterization yields compact meshes for cities, plants, or grids.
- Tools/products/workflows: Tiled tetrahedralization, out-of-core training, and streaming reconstruction; distributed GPU clusters.
- Assumptions/dependencies: Large-scale calibration; scalable memory/compute; data governance; flight permissions.
- Multimodal RGB-D and LiDAR fusion in rasterizable SDFs
- Sector: Robotics, AEC, Surveying
- Use case: Combine camera images with depth/LiDAR to speed convergence and improve completeness in texture-poor scenes.
- Tools/products/workflows: Joint photometric + geometric supervision; sensor-specific uncertainty models; robust SDF-to-opacity mapping for sparse depth.
- Assumptions/dependencies: Extrinsic calibration between sensors; noise modeling; synchronization.
- Differentiable geometry for inverse rendering and material estimation
- Sector: Graphics/Simulation, Digital Twins
- Use case: Use SDFRaster as a backbone for joint optimization of geometry and materials (e.g., estimating BRDFs with mesh consistency).
- Tools/products/workflows: Coupled appearance SDF rendering with physically based shading; differentiable light transport approximations.
- Assumptions/dependencies: Additional illumination capture; improved appearance models and losses.
- Content creation via generative models (text-to-3D) with mesh-grounded supervision
- Sector: Media/AI Content Tools
- Use case: Train or fine-tune generative models to produce meshes directly by supervising against a fast, differentiable SDF renderer.
- Tools/products/workflows: Incorporate SDFRaster into diffusion or score-distillation frameworks as a geometry-consistent renderer.
- Assumptions/dependencies: Large-scale training data; stability and bias control; licensing for training assets.
- CAD-native reconstruction and NURBS/solid modeling conversion
- Sector: Manufacturing, CAD/PLM
- Use case: Convert SDFRaster meshes into CAD-friendly parametric solids or NURBS with watertight guarantees for downstream design/editing.
- Tools/products/workflows: Mesh segmentation + surface fitting; feature recognition (fillets, holes) guided by SDF gradients.
- Assumptions/dependencies: Robust feature detection; high geometric accuracy; domain-specific tolerances.
- Medical and surgical scene reconstruction from multi-camera rigs
- Sector: Healthcare
- Use case: Reconstruct surfaces from laparoscopic/endoscopic multi-view systems for preoperative planning or intraoperative guidance (where feasible).
- Tools/products/workflows: Sterile, calibrated multi-camera rigs; domain-specific regularization and priors for tissue appearance.
- Assumptions/dependencies: Strict calibration and synchronization; safety and regulatory approvals; handling specular, deforming tissues.
- Policy and sustainability frameworks for 3D capture at scale
- Sector: Public Policy, Sustainability
- Use case: Inform procurement and standards (e.g., cultural heritage, smart cities) to favor reconstruction methods that reduce compute and storage while improving geometric fidelity.
- Tools/products/workflows: Benchmarks and reporting for energy-per-reconstruction and storage-per-asset; recommended practices for static-scene capture.
- Assumptions/dependencies: Consensus on metrics; transparent reporting; cross-agency coordination.
Notes on Feasibility and Dependencies (cross-cutting)
- Core dependencies: calibrated multi-view imagery, static scenes (as evaluated), modern GPU with rasterization support, and sufficient coverage/texture.
- Failure modes/limits: dynamic scenes, heavy specular/translucent materials, sparse viewpoints, or poor calibration may degrade results; unbounded scenes require careful regularization (paper disables Eikonal for TnT).
- Scaling constraints: Delaunay tetrahedralization and hash-MLP evaluation add overhead; the paper suggests future work to store explicit per-vertex SDFs to further accelerate training and enable real-time variants.
- Interoperability: exporting standard meshes (OBJ/PLY/glTF) is straightforward; preserving SDF queries requires auxiliary data structures or re-sampling.
Glossary
- Alpha compositing: A technique for accumulating color/opacity contributions along a ray in order, blending overlapping samples. "alpha-compositing their contributions."
- Barycentric coordinates: Coordinates that express a point inside a simplex (e.g., a tetrahedron) as a convex combination of its vertices. "with barycentric coordinates"
- Chamfer distance: A surface comparison metric measuring average bidirectional distance between two point sets/meshes. "achieves the lowest Chamfer distance among explicit baselines on DTU"
- Circumradius: The radius of a simplex’s circumscribed sphere, used here to prioritize which tetrahedra to refine. "ranked by circumradius"
- Culling: Skipping primitives during rendering when they cannot contribute, to save computation without altering geometry. "Culling is a non-destructive operation:"
- Delaunay tetrahedralization: A tetrahedral mesh of points such that the circumsphere of each tetrahedron contains no other points, used as the spatial grid. "Starting from a Delaunay tetrahedralization,"
- Densification: Increasing local resolution or sampling where errors are high or surfaces are present, to better capture detail. "error-driven densification"
- Differentiable Marching Tetrahedra: A surface extraction method from an SDF on a tetrahedral grid made differentiable so gradients flow through mesh vertices. "integrate differentiable Marching Tetrahedra into the optimization loop,"
- Differentiable rendering: Rendering whose outputs are differentiable with respect to scene parameters, enabling gradient-based learning. "a rasterization-based differentiable renderer"
- Eikonal loss: A regularizer encouraging the SDF’s gradient norm to be 1, promoting true distance behavior. "We regularize the SDF with an Eikonal loss"
- Finite differences: A numerical method to approximate derivatives by evaluating function differences over small steps. "via finite differences"
- Front-to-back compositing: Ordering and blending contributions from nearest to farthest along a viewing ray for correct accumulation. "front-to-back order using alpha compositing."
- Gaussian splatting: A real-time rendering approach that rasterizes many Gaussian primitives (“splats”) to synthesize views. "Gaussian splatting enables fast rendering"
- Injective parameterization: A one-to-one mapping (no overlaps) from domain to space, ensuring unambiguous representation. "provide an injective parameterization of the 3D scene"
- Logistic CDF: The cumulative distribution function of the logistic distribution, used to map SDF values to opacities. "using the logistic CDF"
- Marching Cubes: A classic algorithm to extract isosurfaces from scalar fields defined on regular grids. "Marching Cubes (MC)"
- Marching Tetrahedra: An isosurface extraction algorithm using tetrahedral cells to avoid ambiguities present in cubes. "Marching Tetrahedra (MT)"
- Multi-resolution hash encoding: A compact, learned spatial encoding that maps 3D positions into features via hashed grids at multiple scales. "multi-resolution hash encoding"
- Multi-view stereo (MVS): Techniques that reconstruct 3D geometry from multiple calibrated images by matching and triangulation. "multi-view stereo (MVS) methods"
- Neural implicit representations: Neural networks that represent scenes as continuous fields (e.g., SDF or radiance), queried at arbitrary points. "neural implicit representations model surfaces"
- Neural radiance fields (NeRF): A neural volumetric representation that models view-dependent color and density for novel view synthesis. "Neural radiance fields"
- Piecewise-linear SDF: An SDF defined linearly within each cell (tetrahedron), yielding a continuous but piecewise-linear field. "continuous piecewise-linear SDF"
- Pruning: Permanently removing low-contributing or off-surface elements to keep the representation compact. "Pruning is destructive"
- PSNR: Peak Signal-to-Noise Ratio, an image quality metric comparing rendered and ground-truth images. "We report PSNR, SSIM, and LPIPS"
- Rasterization: Rendering by projecting and filling primitives (e.g., triangles, tetrahedra) on the image plane, often on GPUs. "rasterization based methods"
- Ray marching: Sampling and integrating along rays through a volume to render implicit fields, typically computationally intensive. "computationally expensive ray marching."
- Signed distance field (SDF): A scalar field giving the signed distance to the surface (zero where on-surface; sign indicates inside/outside). "implicit signed distance field (SDF) methods"
- SSIM: Structural Similarity Index Measure, an image similarity metric that correlates with perceptual quality. "with SSIM"
- Tetrahedral cell complex: A partition of 3D space into non-overlapping tetrahedra forming a combinatorial mesh structure. "forming a tetrahedral cell complex"
- TSDF fusion: Truncated Signed Distance Function-based integration of multiple depth maps into a volumetric grid to reconstruct surfaces. "TSDF fusion"
- Volume rendering: Rendering images by integrating color and opacity through volumetric densities along rays. "differentiable volume rendering"
- Volumetric primitives: Basic 3D elements (e.g., Gaussians, voxels, cells) used to approximate scenes for rendering or reconstruction. "volumetric primitives"
- Zero level set: The set of points where the SDF equals zero; defines the extracted surface. "zero level set directly defines the surface"
Collections
Sign up for free to add this paper to one or more collections.