- The paper introduces a novel sparse voxel rasterization method integrated with SDFs to enhance 3D surface reconstruction.
- It employs robust initialization using PI³ models and a hierarchical spatial smoothness loss to ensure coherent SDF values across voxel structures.
- Experiments on DTU and Tanks-and-Temples datasets demonstrate improved reconstruction quality and computational efficiency over existing methods.
SVRecon: Sparse Voxel Rasterization for Surface Reconstruction
Introduction
The paper "SVRecon: Sparse Voxel Rasterization for Surface Reconstruction" (2511.17364) presents a method to enhance surface reconstruction from 3D scenes using a novel approach based on sparse voxel rasterization integrated with Signed Distance Functions (SDF). The primary aim is to improve upon existing methods that either suffer from inefficiencies in rendering dense voxel grids or require complex neural network models for sparse voxel elements. This method seeks to leverage the geometric continuity provided by SDFs while mitigating common issues encountered with sparse voxel structures, such as optimization instability and local minima.
Methodology
Initializations and Coherence
SVRecon introduces a robust initialization phase leveraging PI³ visual geometry models, which provide high-quality geometric priors. This initial step aligns predicted point maps into the true camera poses using a similarity transformation. The initialization significantly reduces early optimization ambiguities by clearly defining the space where high-resolution modeling is necessary.
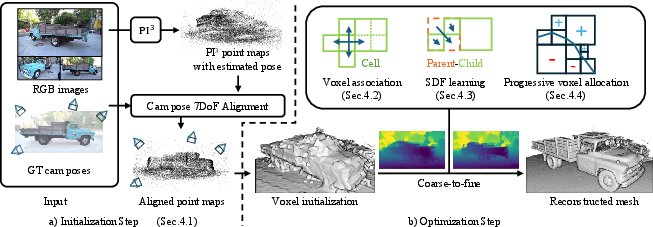
Figure 1: Our pipeline consists of two main stages: (a) Initialization and (b) Optimization. In (a), we initialize a coarse SDF from multi-view images by aligning PI3 point maps.
After initialization, SVRecon employs a hierarchical spatial smoothness loss that promotes coherent SDF values across parent-child and sibling voxel groups. The voxel corners are interconnected to ensure smooth transitions and avoid discontinuities, enabling the accurate modeling of surfaces within sparse voxel frameworks.
Optimization Strategy
SVRecon's optimization stage implements a spatial coherence strategy to maintain the integrity of the SDF values across voxel boundaries. This is managed by enforcing structured smoothness constraints and voxel-wise coherence, targeted at preserving smooth geometric transitions. An advanced voxel association mechanism is introduced to track voxel occupancy at varying levels of detail (LoD). This mechanism ensures efficient data structuring without overwhelming computational resources, even as the resolution increases beyond 29.
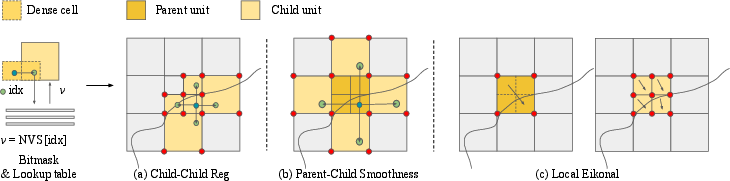
Figure 2: Coherent voxel structure. (a) Illustrates child-child voxel regularization using fine cell unit.
Additionally, SVRecon employs a progressive voxel allocation scheme, alternating between pruning and subdividing voxels based on their contribution to surface modeling. This dynamic adaptation allows the model to concentrate computational efforts on essential areas, enhancing both speed and reconstruction fidelity.
Results
SVRecon demonstrates its efficacy through various benchmarks such as the DTU [Jensen et al., 2014] and Tanks-and-Temples datasets [Knapitsch et al., 2017]. On the DTU dataset, SVRecon achieved competitive Chamfer distance scores with faster convergence compared to established baselines such as NeuS and SVRaster.
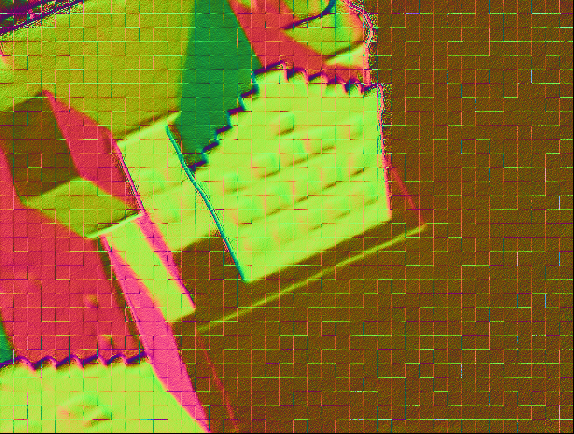
Figure 3: Normals vs. accuracy. Persisting the normal loss until the final iteration proves detrimental without our annealing strategy.
On Tanks-and-Temples, SVRecon consistently outperformed traditional implicit representations in both reconstruction quality and computational efficiency, often within notably reduced execution times. The model was able to reconstruct coherent meshes in complex outdoor scenes without suffering from common degradation issues, showcasing its robustness and scalability.
Qualitative Improvements
Qualitative analyses reveal that SVRecon effectively prevents common artifacts seen with naive combinations of SDF and sparse voxel implementations. Mesh reconstructions were cleaner, maintained structural finer details, and exhibited fewer artifacts across tested scenarios, providing a visual demonstration of its surface smoothness and geometric precision.
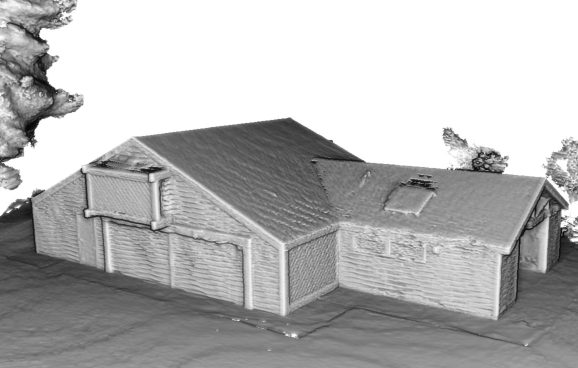




Figure 4: Our method scales to large, complex indoor and outdoor scenes, producing detailed and structurally consistent meshes.
Conclusion
SVRecon introduces a significant advancement in the field of surface reconstruction by combining sparse voxel rasterization with signed distance functions. Through its robust initialization and coherent optimization strategies, SVRecon successfully addresses the discontinuity issues inherent in sparse voxel frameworks, providing both high-fidelity and swift 3D surface reconstructions. Future work might focus on further refining initialization methods and coherence mechanisms to optimize the memory-resolution trade-off, enhancing the model's applicability to even larger and more complex scenes.

