TacForeSight: Force-Guided Tactile World Model for Contact-Rich Manipulation
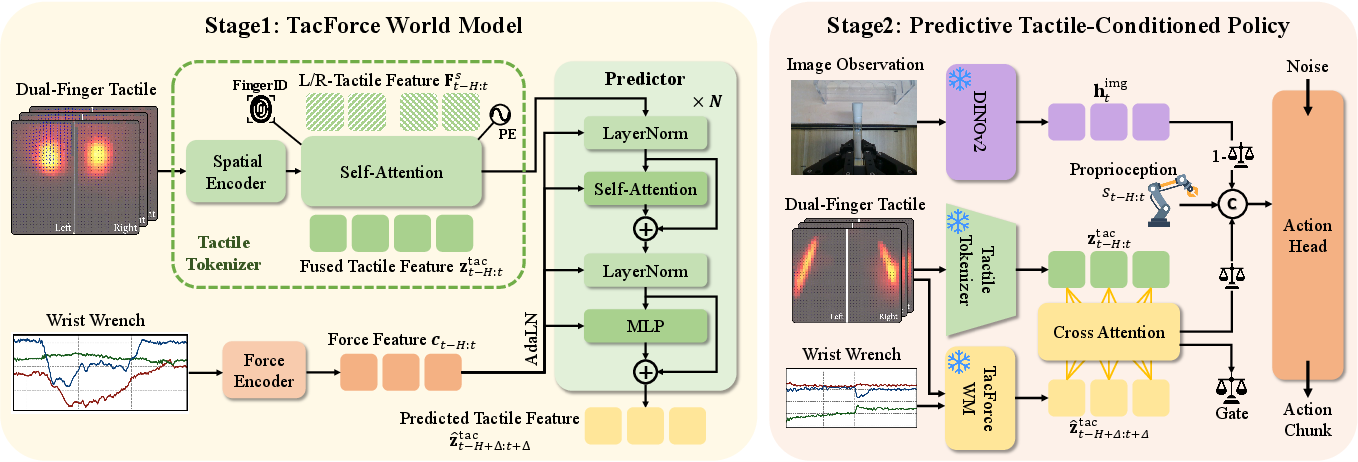
Abstract: Contact-rich manipulation requires robots to continuously perceive and regulate evolving physical interactions under dynamic contact transitions or complex surface geometries. Recent imitation learning methods improve contact-aware control by incorporating tactile or force feedback, but they rarely model the asymmetric spatiotemporal roles of global force and local tactile sensing. To address this, we propose TacForeSight, a lightweight force-conditioned tactile foresight framework for real-time manipulation. The core component is TacForceWM, a tactile world model that predicts short-horizon tactile latent dynamics from dual-finger tactile observations conditioned on high-frequency wrist force and torque signals. Another key component, the Predictive Tactile-Conditioned Policy, leverages the predicted latents as anticipatory contact priors, models the current-to-future tactile evolution via cross-attention, and adaptively fuses visuo-tactile features through a tactile-guided gating module. By forecasting purely within a compact latent space, TacForeSight enables proactive contact reasoning with efficient real-time inference suitable for high-frequency manipulation control. Real-robot experiments on five representative tasks and three in-process perturbation settings show that TacForeSight consistently outperforms existing baselines, particularly under dynamic contact disturbances. All models and datasets will be made publicly available on the project website at https://tacforesight.github.io/ProjectPage.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper introduces TacForeSight, a way to help robots handle tricky, touch-heavy tasks—like sliding a card, inserting a wire, or locking a light bulb—without messing up. The key idea is to let the robot “look a little into the future” using its sense of force and touch, so it can act proactively instead of just reacting when something goes wrong.
The big questions the researchers asked
- Can a robot use quick changes in force at its wrist (global signals) to predict what its fingertips will feel soon after (local touch), and use that prediction to act more smartly?
- Will this prediction help the robot keep contact, avoid slipping, and recover from bumps or surprises during a task?
How did they study it?
They built a two-part system that combines sensing, prediction, and action planning.
Sensors and signals
- Wrist force/torque sensor: Think of this like feeling the load on your wrist—fast, global signals that tell you something in the interaction is changing.
- Fingertip tactile sensors: Like your fingerprints sensing tiny squishes and slides—slower, detailed, local signals about contact shape and pressure.
- A camera and robot joint positions to give extra context.
A key observation: changes in the wrist force often happen slightly before changes in fingertip touch. That means force can warn the robot about what the touch will feel like next.
The robot’s “world model” (TacForceWM)
- World model means a learned “imagination” of what will happen next.
- TacForceWM takes recent fingertip touch and high-speed wrist force, then predicts how the fingertip touch will evolve over the next short moment.
- It predicts in a compact “latent space,” which is like a summary note instead of a full high-resolution image. This makes it fast.
- Analogy: If you push a door, your wrist feels a change before your fingertips fully slide—TacForceWM learns that pattern and predicts the fingertip feeling ahead of time.
The action policy that uses predictions
- The policy is the part that decides what the robot should do next.
- It mixes three things: camera features (what it sees), robot state (how it’s moving), and the predicted touch features (what it expects to feel).
- Two neat tricks:
- Current–future touch cross-attention: The policy lets the “now” touch focus on the most useful parts of the “predicted” touch, so it can prepare for contact changes.
- Tactile-guided gating: The predicted touch decides how much to trust vision vs. touch at each moment. For example, during a delicate insertion, it may trust touch more than vision.
- For generating actions, it uses a lightweight method that starts with a rough plan and refines it step by step (you can think of it like sketching and then cleaning up the drawing).
Training and speed
- Step 1: Train the world model to predict future touch from force + recent touch, using lots of recordings of real interactions.
- Step 2: Freeze that model and train the policy to use its predictions to pick actions.
- Because everything works in a compressed “latent” form, it runs in real time (about 20 times per second on a powerful GPU).
What did they test?
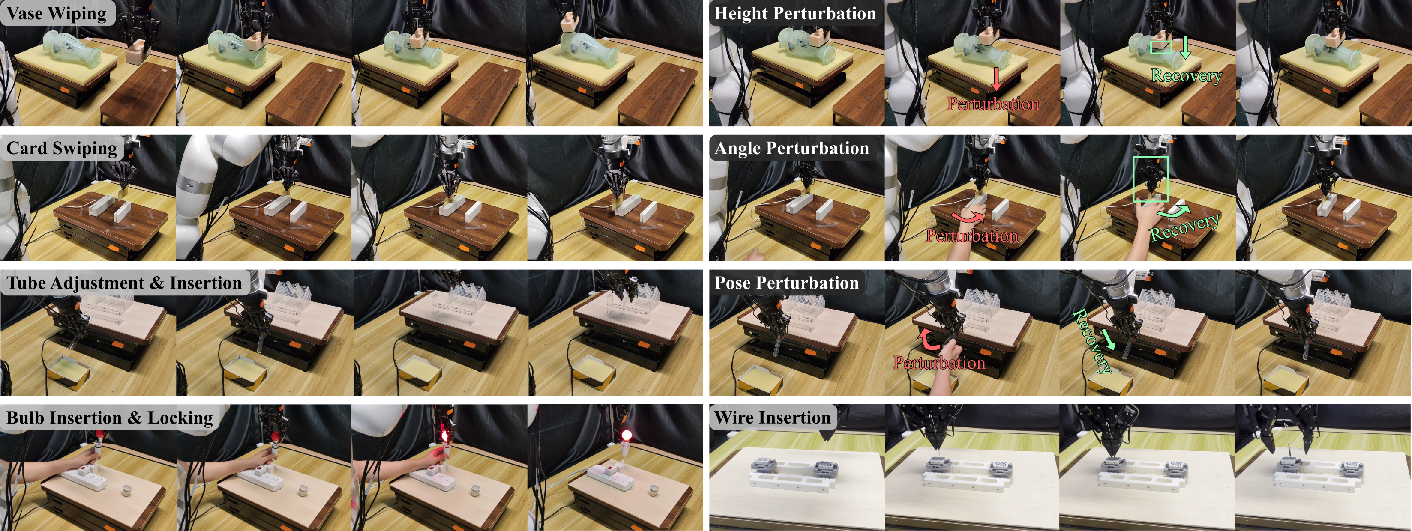
They used a real robot arm with a two-finger gripper and fingertip tactile sensors on five contact-heavy tasks:
- Wiping a vase
- Swiping a card
- Adjusting and inserting a tube
- Inserting and locking a light bulb
- Inserting a flexible wire
They also added surprise disturbances mid-task, like changing the height, angle, or object pose, to see if the robot could recover contact and continue.
What did they find?
- The robot succeeded more often than other methods on all five tasks and was especially strong when things changed mid-task.
- It was better at:
- Establishing contact (lining up correctly)
- Maintaining contact (avoiding slips while sliding)
- Recovering contact (after a bump or shift)
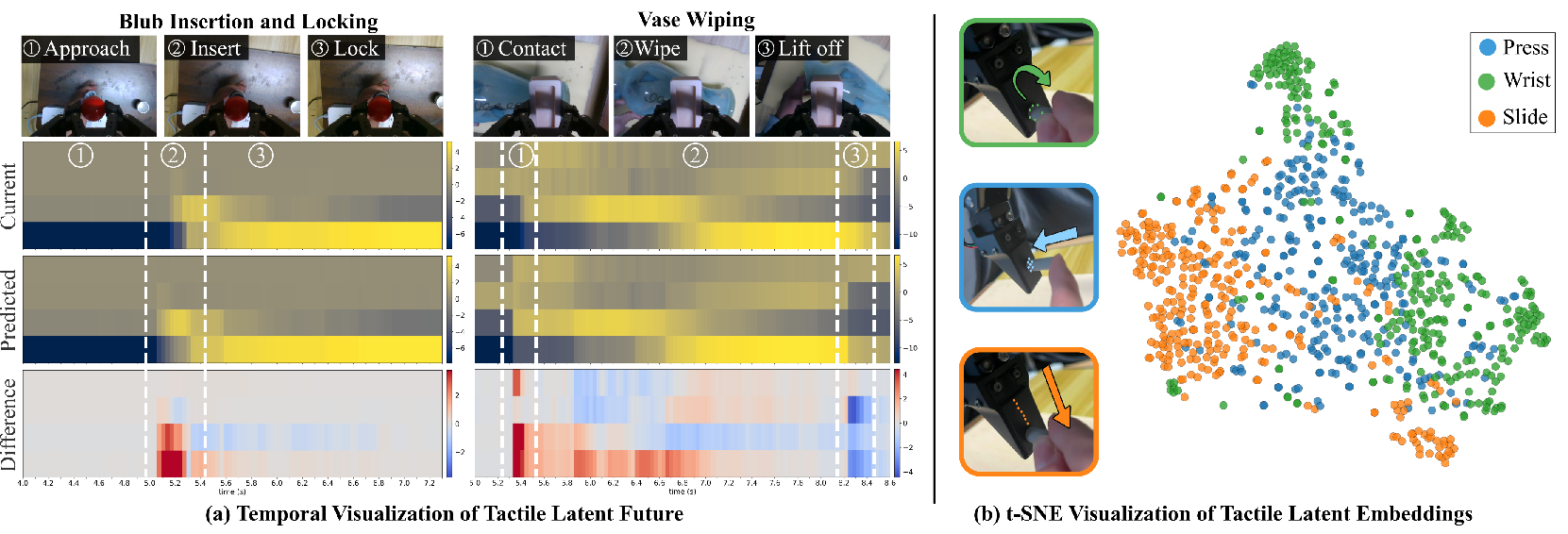
- The predicted touch “looked ahead” by about 200 milliseconds in key moments, giving the policy time to prepare instead of just reacting.
- Simple “just fuse the sensors” baselines didn’t handle disturbances well. What made the difference was:
- Predicting future touch from force
- Letting current touch attend to predicted touch (the cross-attention)
- Using the tactile-guided gate to balance vision and touch based on the situation
In short: planning with “touch foresight” made the robot much more robust.
Why it matters
Robots that can think one step ahead about contact—using force to anticipate touch—are better at real-world tasks where slipping, misalignment, or surprises happen all the time. This could improve:
- Factory assembly (snapping, inserting, locking parts)
- Household help (plugging in cables, opening containers)
- Safer human–robot interaction (gentle, controlled contact)
Because TacForeSight is efficient (it predicts in a compact space), it’s practical for real-time control. The general idea—use fast, global force cues to predict precise, local touch—could also inspire better prosthetics and new kinds of sensitive robot hands.
Overall, the work shifts robot manipulation from reactive to proactive: instead of waiting for errors, the robot anticipates them and adjusts early.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise list of unresolved issues left by the paper, phrased to guide actionable follow-up research:
- Generalization across hardware: Performance is only demonstrated on an xArm7 with a Robotiq 2F-85 gripper, a specific wrist FT sensor, and Xense optical tactile sensors; it is unknown how TacForeSight transfers to different robots, grippers (e.g., suction, soft grippers), tactile form factors (e.g., GelSight, capacitive arrays), and varying fingertip geometries.
- Cross-sensor robustness: The method assumes stable, calibrated wrist FT and optical tactile signals; sensitivity to sensor noise, latency, drift, saturation, temperature effects, and re-calibration after sensor replacement is not characterized.
- Time synchronization and latency: The framework relies on high-rate FT (120 Hz) preceding tactile (30 Hz); the impact of time-stamping errors, variable sensor latencies, and alignment strategies on prediction quality and control performance is not evaluated.
- Short-horizon prediction limits: Only short-horizon tactile foresight is considered; the effective prediction horizon, its optimal value, and failure modes from compounding errors for longer horizons remain unstudied.
- Uncertainty quantification: The world model produces point estimates in latent space; how to represent and leverage predictive uncertainty (e.g., probabilistic forecasts, confidence-aware policies) for safer contact control is not addressed.
- Latent interpretability: Predicted tactile latents are not mapped to physically meaningful quantities (e.g., contact patch, local pressure, slip, friction regime), limiting explainability and potentially hindering diagnostic use.
- Modality asymmetry: The model is unidirectional (force-to-tactile); whether joint modeling (e.g., predicting future force and tactile jointly) or tactile-to-force prediction could improve performance is open.
- Fusion design scope: The visual-tactile fusion is channel-wise gating conditioned on tactile; how alternative fusion mechanisms (token-level, cross-modal attention both ways, hierarchical fusion) trade off robustness and latency is not examined.
- Policy action space clarity: The paper does not specify whether actions are Cartesian pose deltas, joint commands, or hybrid force-position targets; integrating explicit force targets or impedance parameters into the action space is unexplored.
- Low-level control interface: The interaction between predicted action chunks and the robot’s low-level controllers (e.g., impedance settings, compliance modes) is not specified; how controller choices affect contact stability is unstudied.
- Update rate constraints: Real-time inference runs at ~20 Hz on an RTX 4090D; the impact of lower compute (edge devices), higher control rates, and asynchronous updates on performance in fast contact transients is unknown.
- Data efficiency and scaling: Sample efficiency relative to baselines, scaling laws with dataset size/model capacity, and minimal demo requirements (especially for recovery behaviors) are not analyzed.
- Dataset diversity: Although 2,700 episodes are used, the diversity in objects, materials, surface textures, friction coefficients, compliance, and geometry variability is not detailed; robustness to these factors remains unclear.
- OOD generalization: Generalization to new tasks, objects, or contact regimes (e.g., deformable/soft objects, lubricated surfaces, high compliance, flexible cables beyond one instance) without retraining is not evaluated.
- Perturbation coverage: Only three perturbations (height/angle/pose) are considered; robustness to friction changes, variable mass/inertia, compliance variations, surface wetness/contamination, or moving fixtures remains open.
- Multi-contact and dexterous settings: The approach is demonstrated on a parallel-jaw gripper; extension to multi-finger dexterous hands, multi-contact scenarios, or bimanual manipulation is untested.
- Pre-contact and contact transitions: The gating condition is tactile-centric; how the policy balances visual vs tactile cues during approach (no contact) and very first contact events is not systematically studied.
- Failure mode analysis: The paper lacks systematic characterization of failure cases (e.g., slip not anticipated, over/under-contact forces, misalignment persistence), making targeted improvements difficult.
- Alternative conditioning signals: Only wrist FT is used for conditioning; whether additional signals (joint torques, gripper force/position, vibration, audio, high-rate IMU) further improve foresight is not explored.
- Synchronization granularity: The force encoder downsamples FT to tactile-aligned conditions; how different alignment schemes (event-triggered, learned alignment, variable-rate conditioning) affect accuracy is unexamined.
- Objective choices in latent space: The world model uses MSE and first-order temporal loss on latents with SIGReg; the effect of alternative objectives (contrastive, predictive coding, adversarial, InfoNCE on temporal dynamics) on predictiveness and stability is unknown.
- Hyperparameter sensitivity: No sensitivity analysis is provided for key choices (e.g., chunk length H, offset Δ, λ_dyn, λ_sig, number of attention layers), leaving tuning guidance unclear.
- Cross-attention ablations depth: While cross-attention helps, its architecture (number of heads, layers, causal masking, positional encodings) and alternatives (bidirectional attention, co-attention, transformers vs RNNs) are not compared.
- Planning vs reactive policy: Predicted tactile latents are used inside an imitation policy; integrating foresight into model-predictive control or trajectory optimization, and comparing planning vs policy conditioning, is left unexplored.
- Online adaptation: The world model and policy are frozen at deployment; whether test-time adaptation, meta-learning, or online self-supervision improves robustness under distribution shift is not investigated.
- Safety and force limits: There is no assessment of safety (peak force limits, energy, surface damage) or mechanisms for constraint satisfaction driven by foresight (e.g., predictive force bounding).
- Baseline fairness and reproducibility: Some baselines are modified (e.g., FoAR RGB substitution), and training budgets/hyperparameters are not detailed; the fairness of comparisons and reproducibility details require clarification.
- Vision dependence and occlusion: The camera is wrist-mounted; the effects of occlusion by the gripper/hand, poor lighting, or reduced visual signal quality on the gating and performance are not quantified.
- Temporal re-planning cadence: The action chunk length L and re-planning frequency are not specified; how chunk size impacts latency, stability, and responsiveness to fast contact changes is unclear.
- Multi-task pretraining: The degree to which the tactile world model pretraining yields reusable, task-agnostic latents versus task-specific features, and how to best compose or fine-tune for new tasks, remains open.
Practical Applications
Below are actionable, real-world applications derived from the paper’s findings and methods. Each item notes the primary sector(s), what tools/products/workflows could emerge, and key assumptions or dependencies that affect feasibility.
Immediate Applications
These can be piloted or deployed now with available hardware (6-axis F/T sensor, optical fingertip tactile sensors, RGB wrist camera) and a modern GPU-enabled control PC.
- Robust connector, pin, and wire-harness insertion in flexible assembly lines (Sector: robotics, manufacturing, automotive, consumer electronics)
- Tools/Products/Workflows: “Contact Foresight” cell add-on that plugs into existing robot cells (ROS2 node for TacForeSight inference, PLC interface, tactile-FT calibration utility, anomaly monitor based on predicted vs. observed tactile latent divergence). Skill library for insertions (USB/board-to-board/push-fit), routing wires into sockets, and locking.
- Assumptions/Dependencies: Dual optical tactile pads on gripper fingertips, 6-axis wrist F/T sensor, modest per-task demonstration data, stable illumination for optical tactile, industrial GPU or edge AI PC capable of ~20 Hz inference, safety interlocks.
- Press-fit, twist/lock, and bulb/tube seating operations (Sector: robotics, manufacturing)
- Tools/Products/Workflows: Skill templates for twist-lock bulbs, grommet seating, hose coupling with force-conditioned tactile prediction; online recovery behaviors that re-establish contact after slip/misalignment.
- Assumptions/Dependencies: Mechanical compliance or small end-effector compliance, routine sensor recalibration, task demonstrations covering common perturbations.
- Surface wiping, polishing, and scrubbing with stable contact under uneven surfaces (Sector: facilities, manufacturing, logistics)
- Tools/Products/Workflows: Wipe/polish apps with adaptive contact regulation; parameterized recipes (target normal force, path, recovery policy); dashboards showing anticipatory slip/height-change alerts from predicted tactile latents.
- Assumptions/Dependencies: Wear-resistant tactile skins for abrasive tasks, periodic replacement, wet/dust protection for sensors, integration with path planners.
- Lab automation for tubing/catheter insertion and alignment in non-sterile environments (Sector: biotech, lab automation, pharma manufacturing)
- Tools/Products/Workflows: Recipe-driven tube insertion/adjustment workflows; anomaly detection that halts when predicted/actual tactile latents diverge (indicative of blockage or kinks).
- Assumptions/Dependencies: Non-sterile setting; task-specific demos; chemical compatibility of tactile skins with lab reagents.
- Teleoperation assistance with predictive tactile overlays (Sector: service robotics, nuclear/defense labs, maintenance)
- Tools/Products/Workflows: Operator UI that visualizes predicted tactile state 100–300 ms ahead; haptic cue mapping to preempt slip; shared-autonomy “nudge” controller that adaptively fuses operator commands with tactile priors.
- Assumptions/Dependencies: Reliable low-latency comms; calibration between haptic device and robot; safety supervisor to bound autonomous corrections.
- Cobots that tolerate fixture looseness and on-the-fly disturbances (Sector: manufacturing/SME)
- Tools/Products/Workflows: Drop-in TacForeSight policy for existing diffusion/flow controllers to improve recovery from knocks, belt vibrations, or part pose drift; reduced fixture rigidity requirements.
- Assumptions/Dependencies: Enough demonstrations covering disturbance modes; change-management to validate process capability and quality under softer fixturing.
- Inline quality and misalignment detection from “contact prediction residuals” (Sector: quality assurance, manufacturing)
- Tools/Products/Workflows: Residual metrics (|predicted tactile latent − observed|) triggering stop/repair; trend analytics across shifts for fixture/tool wear diagnostics.
- Assumptions/Dependencies: Threshold tuning per task/material; data logging and traceability infrastructure; operator workflows for interventions.
- Teaching and benchmarking predictive contact policies (Sector: academia, education, R&D labs)
- Tools/Products/Workflows: Open-source datasets and code; standardized contact-rich benchmarks with perturbations; course labs that demonstrate asymmetry between global F/T and local tactile.
- Assumptions/Dependencies: Access to an xArm-class manipulator with tactile pads, F/T sensor; GPU workstation; license-compliant reuse of DINOv2 or equivalent vision backbones.
- Procurement and deployment guidance for tactile-aware cobot cells (Sector: policy, industrial governance, operations)
- Tools/Products/Workflows: Internal best-practice guidelines recommending 6-axis F/T + optical tactile fingertips for contact-rich tasks; SOPs for sensor calibration, data retention, and safety testing of predictive controllers.
- Assumptions/Dependencies: Organizational buy-in; alignment with existing ISO/ANSI robot safety standards; vendor support for tactile skins and spares.
Long-Term Applications
These require further R&D, scaling, hardware maturation, standardization, or regulatory clearance.
- Minimally invasive surgical manipulation with anticipatory contact control (Sector: healthcare, medical robotics)
- Tools/Products/Workflows: Force-conditioned tactile priors to predict tissue slip/tear risk, suture guidance, catheter threading; surgeon HUD overlays of predicted contact evolution.
- Assumptions/Dependencies: Sterilizable, biocompatible tactile sensors; medical-grade F/T sensors; rigorous validation, regulatory approval (FDA/CE), higher control frequencies, fail-safe design.
- Dexterous-hand micro-assembly (smartphones, optics) with sub-millimeter insertions (Sector: advanced manufacturing, electronics)
- Tools/Products/Workflows: Multi-finger TacForeSight variants for delicate part seating, flex-circuit routing; micro-tactile sensor arrays; learned recovery for micron-scale misalignments.
- Assumptions/Dependencies: Miniaturized, high-bandwidth tactile arrays; precision end-effectors; extremely low-latency control loops; synthetic data augmentation for rare events.
- General-purpose household robots that plug, twist, latch, and wipe robustly (Sector: consumer robotics)
- Tools/Products/Workflows: Home skill packs (plugging chargers, HDMI/USB insertion, appliance knobs, cleaning countertops) with predictive contact policies; user-guided demo collection apps.
- Assumptions/Dependencies: Low-cost durable tactile skins; compact edge AI; strong generalization across unseen home objects; child/pet-safe behaviors.
- Energy and infrastructure maintenance (valve operations, probe insertion, panel latching) in harsh environments (Sector: energy, utilities, oil & gas)
- Tools/Products/Workflows: Outdoor-rated tactile skins and sealed F/T modules; predictive contact control for wind/thermal plant inspections; autonomous recovery from wind/vibration.
- Assumptions/Dependencies: Environmental sealing (IP ratings), wide temperature ranges, EMI resilience; remote monitoring; specialized failure modes in standards.
- Humanoid and mobile manipulators using predictive contact to operate tools (Sector: robotics, industrial service, construction)
- Tools/Products/Workflows: Tool-use libraries (wrenches, drills, scrapers) informed by tactile foresight; whole-body force integration (feet/arms) for stable interactions with the environment.
- Assumptions/Dependencies: Whole-body sensing integration; higher DOF coordination; richer datasets covering tool dynamics; safety certification for human-proximal operation.
- Intelligent prosthetics and exoskeletons with predictive slip prevention (Sector: healthcare, assistive tech)
- Tools/Products/Workflows: Socket/fingertip tactile prediction to adjust grip before slip; user-intent fusion with contact priors; on-device learning from daily use.
- Assumptions/Dependencies: Comfortable, low-profile tactile sensors; ultra-low-power inference; medically safe force limits; personalized training.
- Standardized tactile-latent interfaces and benchmarks across sensors and platforms (Sector: software, standards, research)
- Tools/Products/Workflows: Vendor-neutral “tactile latent” spec, conversion layers for different tactile technologies (optical, capacitive, piezoresistive), large multi-domain datasets; foundation models for contact.
- Assumptions/Dependencies: Cross-industry consortium; IP/data-sharing frameworks; robust domain adaptation to new sensors/materials.
- Learned tactile simulators and synthetic data pipelines (Sector: software, simulation, robotics)
- Tools/Products/Workflows: Latent-space contact simulators for planning and offline RL; task randomization at scale; sim-to-real adapters that preserve force–tactile temporal asymmetry.
- Assumptions/Dependencies: High-fidelity tactile/force domain randomization; validated sim–real metrics for contact; tool support in common simulators (Isaac, Mujoco).
- Safety, certification, and data governance policies for predictive contact controllers (Sector: policy, standards)
- Tools/Products/Workflows: ISO/IEC test protocols for contact prediction accuracy, fail-safe behaviors on model error, required logging of force/tactile streams; acceptance criteria for cobot deployment in contact-rich tasks.
- Assumptions/Dependencies: Multi-stakeholder engagement (vendors, integrators, regulators); harmonization with existing robot safety standards; longitudinal field data to set thresholds.
Notes on overarching dependencies and assumptions drawn from the paper:
- Hardware: Dual optical tactile sensors on fingertips and a 6-axis wrist F/T sensor are central. Durability, contamination resistance, and calibration are critical in production.
- Data: Task-specific demonstrations and diverse contact episodes are needed; generalization across tasks/sensors may require domain adaptation or further pretraining.
- Compute/Latency: The reference system runs at ~20 Hz on a high-end GPU; some applications may demand higher control rates or optimized inference stacks.
- Method priors: The approach leverages the observed asymmetry that wrist wrench changes precede tactile changes; tasks with atypical dynamics or very soft contacts may reduce this advantage.
- Safety and compliance: Predictive control must be wrapped with safety supervisors, conservative force limits, and comprehensive validation before deployment in human-shared spaces or regulated domains.
Glossary
- Action chunk: A contiguous sequence of future actions predicted together as a unit for control efficiency. "predicts an action chunk"
- Adaptive Layer Normalization (AdaLN): A normalization layer whose parameters are modulated by a conditioning signal to inject context into Transformer layers. "adaptive layer normalization (AdaLN)"
- Adaptive visuo-tactile fusion: A module that dynamically weights visual and tactile features based on task context for robust control. "Adaptive Visuo-Tactile Fusion"
- Anticipatory contact priors: Predicted signals about upcoming contact states used to guide control before the contact occurs. "provide anticipatory contact priors."
- Causal temporal downsampling layer: A time-aligned downsampling operation that preserves causality while matching different sensor rates. "A causal temporal downsampling layer aligns the high-rate force features"
- Chunk-based forecasting: Predicting sequences in fixed-length chunks to improve temporal coherence compared to frame-wise prediction. "we formulate the task as chunk-based forecasting"
- CLS token: A special Transformer token prepended to a sequence to aggregate global information. "learnable [CLS] token."
- Conditional flow matching: A generative modeling framework that learns a velocity field to transform noise into actions conditioned on observations. "a lightweight conditional flow matching framework"
- Cross-attention: An attention mechanism where one sequence (queries) attends to another (keys/values) to integrate information. "introduce a cross-attention mechanism"
- Cross-modal dynamics: The predictive relationships between different sensing modalities over time. "cross-modal dynamics between global force variations and local tactile state evolution."
- DINOv2: A pretrained vision backbone used to encode images into features for manipulation tasks. "a frozen DINOv2-small~\cite{oquab2023dinov2} backbone"
- Dilated causal 1D convolutional blocks: Temporal convolutions with dilation and causal structure to capture multi-scale history without future leakage. "dilated causal 1D convolutional blocks"
- Finger-specific identity embeddings: Learnable vectors that encode which finger produced a tactile measurement to preserve role-specific information. "finger-specific identity embeddings"
- Flow-based policy: A policy that generates actions by integrating a learned flow (velocity field) from noise to expert actions. "a lightweight flow-based policy"
- Flow-matching Action Head: The policy component that implements conditional flow matching to produce action sequences. "Flow-matching Action Head"
- Force-conditioned tactile world model: A predictive model of tactile dynamics whose latent updates are conditioned on wrist force/torque signals. "a force-conditioned tactile world model"
- Latent dynamics predictor: The model component that forecasts future latent representations of tactile states. "Latent Dynamics Predictor"
- Latent predictive formulation: Modeling future evolution directly in a compact latent space rather than reconstructing high-dimensional observations. "we adopt a latent predictive formulation"
- Latent space: A compact representation space where high-dimensional sensor data are embedded for efficient prediction and control. "within a compact latent space"
- LeJEPA: A self-supervised learning approach that inspires the regularization strategy used to prevent representation collapse. "Inspired by LeJEPA~\cite{balestriero2025lejepa}"
- Optical tactile sensors: Cameras observing deformable markers to measure fine-grained surface contact deformations. "optical tactile sensors capture fine-grained local deformation."
- Ordinary differential equation (ODE) integration: Numerical integration of a learned velocity field over time to generate an action sequence. "integrating the learned ordinary differential equation"
- PCA (Principal Component Analysis): A dimensionality reduction method used for visualizing or analyzing latent trajectories. "projected into a low-dimensional PCA space"
- Predictive Tactile-Conditioned Policy: The control policy that uses predicted tactile latents as priors to inform action generation. "Predictive Tactile-Conditioned Policy"
- Proprioceptive history: A sequence of recent robot state measurements (e.g., joint positions/velocities) used as policy input. "The recent proprioceptive history"
- SIGReg (Sketched Isotropic Gaussian Regularizer): A regularizer that shapes latent distributions toward an isotropic Gaussian to avoid collapse. "Sketched Isotropic Gaussian Regularizer (SIGReg)"
- Spatial positional embeddings: Learnable vectors added to features to encode spatial location information. "spatial positional embeddings"
- Tactile latents: Compact vector representations of tactile observations used for prediction and control. "predicted tactile latents"
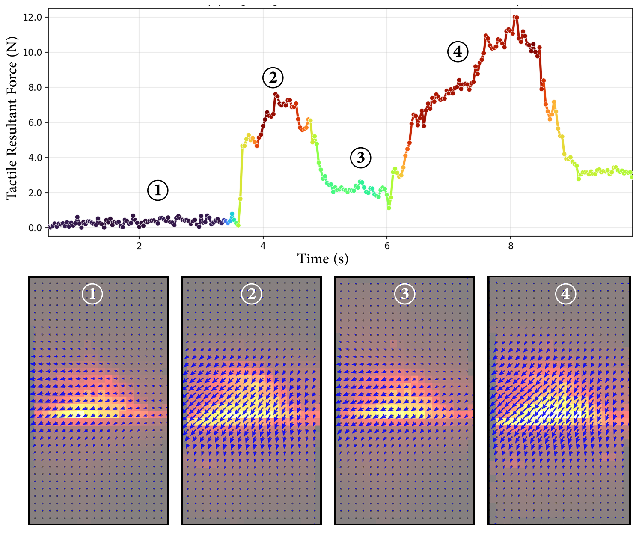
- Tactile resultant force trajectory: The time series of resultant contact force derived from tactile sensing during an interaction. "tactile resultant force trajectory"
- Tactile tokenizer: The encoder that converts dense tactile fields into compact tokenized latent vectors. "tactile tokenizer"
- Tactile world model: A predictive model that forecasts the evolution of tactile states under interaction dynamics. "tactile world model"
- Temporal embeddings: Learnable vectors encoding the timestep position within a sequence to preserve temporal order. "learnable temporal embeddings"
- Temporal U-Net: A U-Net architecture adapted to temporal sequences for predicting velocities in flow matching. "A temporal U-Net"
- Transformer: An attention-based neural architecture used to model dependencies across spatial patches and across fingers. "A Transformer is applied"
- t-SNE: A nonlinear embedding technique used to visualize high-dimensional latent representations. "t-SNE visualization"
- Visuo-tactile fusion: Combining visual and tactile features to produce a unified representation for action prediction. "visuo-tactile fusion module"
- Visuomotor imitation policy: A learned policy that maps visual (and other) observations to actions by imitating expert demonstrations. "a visuomotor imitation policy"
- Wrist wrench: The six-dimensional force/torque vector measured at the wrist that provides global interaction cues. "Wrist wrench signals provide high-frequency global cues"
Collections
Sign up for free to add this paper to one or more collections.