T-Rex: Tactile-Reactive Dexterous Manipulation
Abstract: The ability to react dynamically to tactile signals has long been considered crucial to agile human-level dexterity. Yet contemporary learning-based Vision-Language-Action (VLA) models for robotic manipulation generally either overlook the tactile modality or are limited to encoders with static cues, due in part to the scarcity of diverse training data and standardized evaluation, architectural constraints in current VLA models, and limitations of static tactile encoders. In this paper, we push the frontier of tactile-reactive manipulation by addressing all of these limitations. We propose a large-scale, 100-hour tactile-rich dataset collected via a novel, data-efficient recipe that prioritizes elementary motor primitives. To effectively exploit naturally high-frequency touch signals without sacrificing the existing capabilities of existing VLAs, we introduce a variable-rate Mixture-of-Transformers (MoT) architecture equipped with a novel temporal tactile VQ-VAE encoder. We demonstrate the effectiveness of tactile-reactive policies on 12 manipulation tasks requiring delicate force control and deformable object manipulation, achieving over 30% higher average success rate than the strongest baseline.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
T-Rex: Tactile‑Reactive Dexterous Manipulation — A Simple Explanation
What is this paper about?
This paper introduces T‑Rex, a robot system that uses both vision (seeing) and touch (feeling) to handle delicate, real‑world tasks with two robotic hands. The big idea is to give robots fast “reflexes” from touch, like humans have, so they can react quickly when they feel pressure, slip, or contact—things that cameras can’t always see.
What questions were the researchers trying to answer?
- How can a robot react to touch signals fast enough to handle tricky, contact‑heavy tasks (like sliding a card into a slot or opening a lock)?
- Can we train a robot mostly from large human videos (for general know‑how) and then “add” touch skills later with a smaller amount of touch data?
- What kind of model and sensors help combine slow, thoughtful planning (from vision and language) with fast, fingertip-level corrections (from touch)?
- Does adding touch really help compared to using vision alone?
How did they approach the problem?
The team combined a new dataset, a new training recipe, and a new model design. Here’s the idea in everyday terms:
1) A large, touch‑rich robot dataset
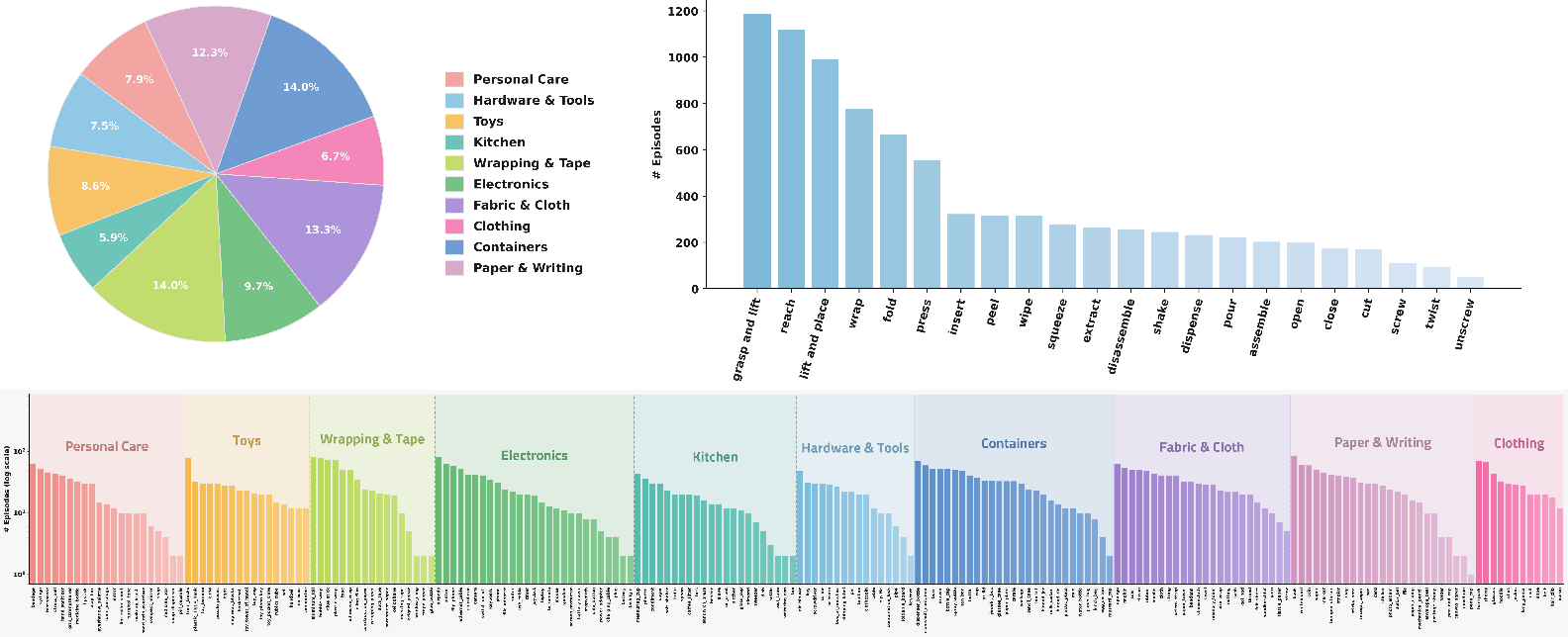
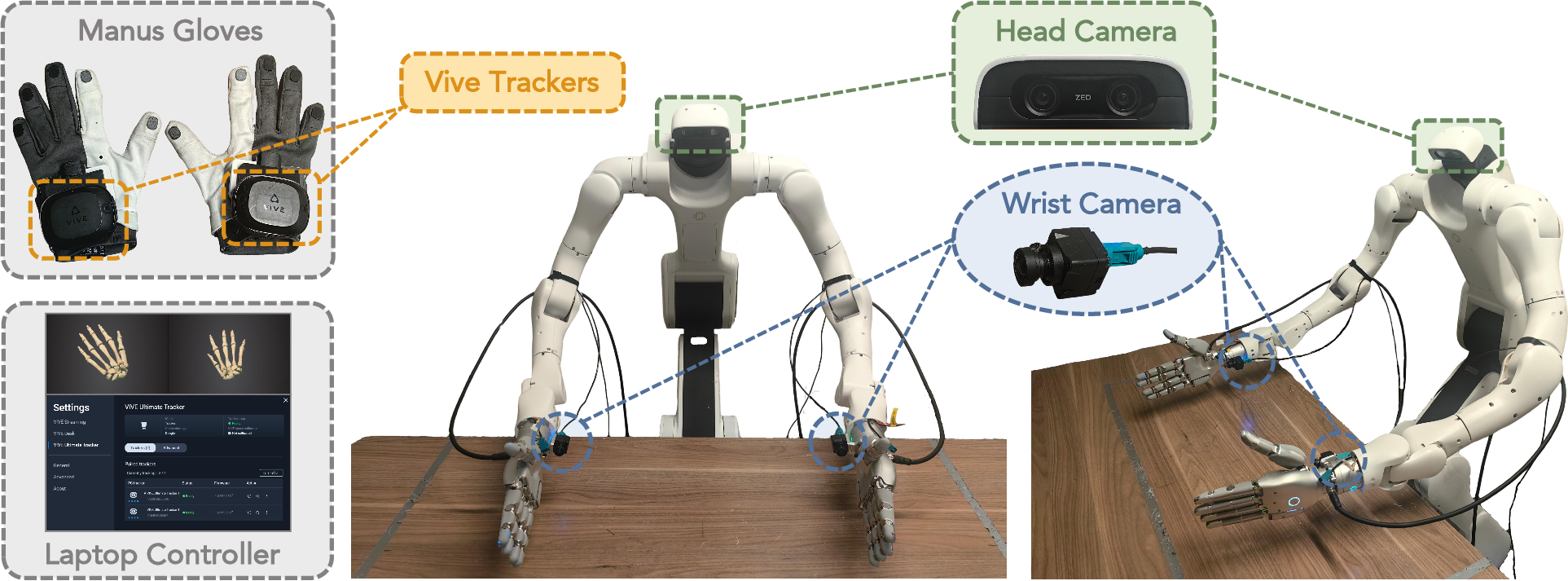
- They built the T‑Rex Dataset: 100 hours of real robot demonstrations using two dexterous robotic hands and many everyday objects.
- The data includes:
- Videos from cameras (the robot’s “eyes”),
- Tactile signals from sensors on the fingers (the robot’s “sense of touch”),
- The robot’s actions (how it moved),
- Short text instructions (what it was trying to do).
- Instead of just recording specific tasks, they focused on basic “motor primitives” (simple moves like press, slide, pinch) across 200+ objects so the robot could learn general contact skills.
2) Three‑stage training (like learning in layers)
- Stage 1: Pre‑training on human videos
- The model watches a huge amount of first‑person human videos (tens of thousands of hours) to learn general “how people use their hands” knowledge. This gives broad common sense about manipulating objects.
- Stage 2: Mid‑training with robot touch
- Now it practices with the 100‑hour touch‑synchronized robot dataset to learn how touch feels on a robot and how to react to it quickly.
- Stage 3: Post‑training (fine‑tuning)
- For a specific task (like opening a lock), it practices with about 100 short examples to polish the skill.
3) A model that blends “slow thinking” and “fast reflexes”
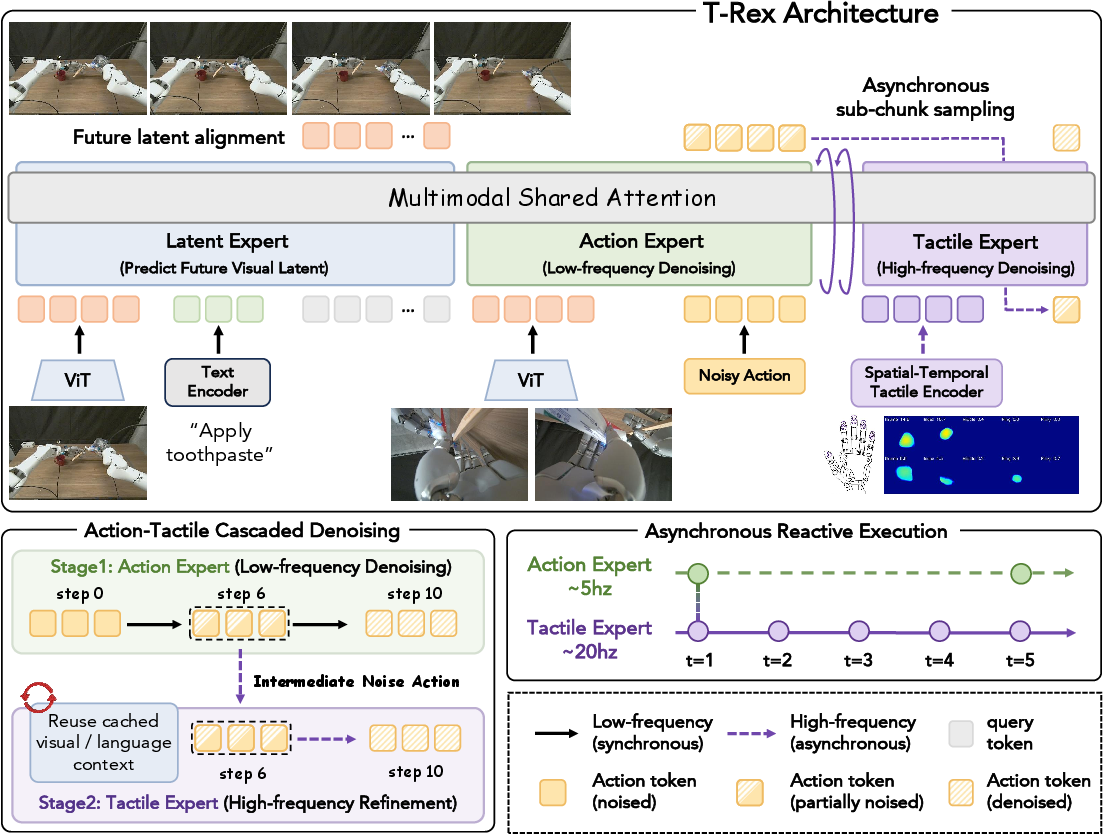
- Mixture of Transformer Experts (think “a team of coaches”):
- A “vision‑language expert” predicts what the future might look like from camera views (context).
- An “action expert” makes a base plan at a slower pace (like a careful driver setting a route).
- A “tactile expert” reacts many times per second to touch, making tiny corrections (like quick steering adjustments).
- Asynchronous control (different speeds working together):
- The slow expert plans an action chunk.
- The fast expert uses the same visual context but updates the actions rapidly whenever new touch signals arrive.
- Tactile encoder (compressing touch information):
- Touch signals come in fast. The model uses a kind of compressor (called VQ‑VAE) to turn recent touch history into short, meaningful codes—like zipping a big file—so the robot can react quickly without getting overwhelmed.
- Action generation with “denoising” (simple analogy):
- The robot starts with a “noisy” action guess and gradually cleans it up into a smooth plan—like unblurring a photo step by step. The slow part does the first half; the fast tactile part finishes with precise corrections.
What did they find, and why does it matter?
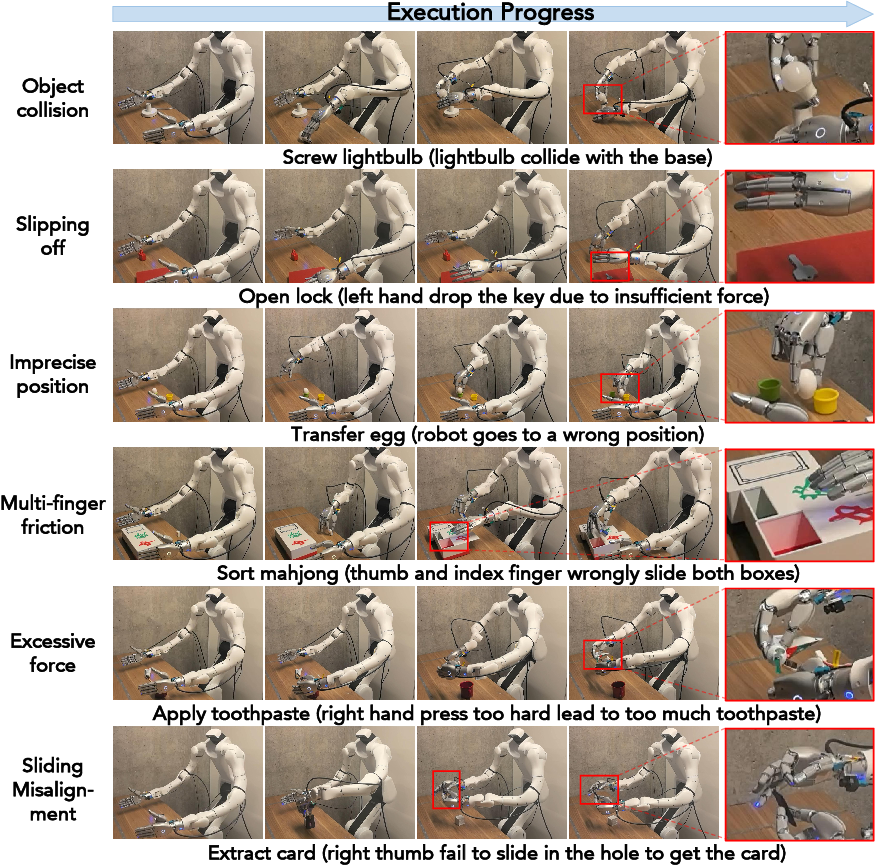
The researchers tested T‑Rex on 12 real, contact‑heavy tasks, such as:
- Flipping a page without tearing it,
- Extracting a thin card from a tight slot,
- Opening a lock with a key,
- Screwing in a lightbulb,
- Handling soft or deformable objects (like toothpaste or cups).
Key results:
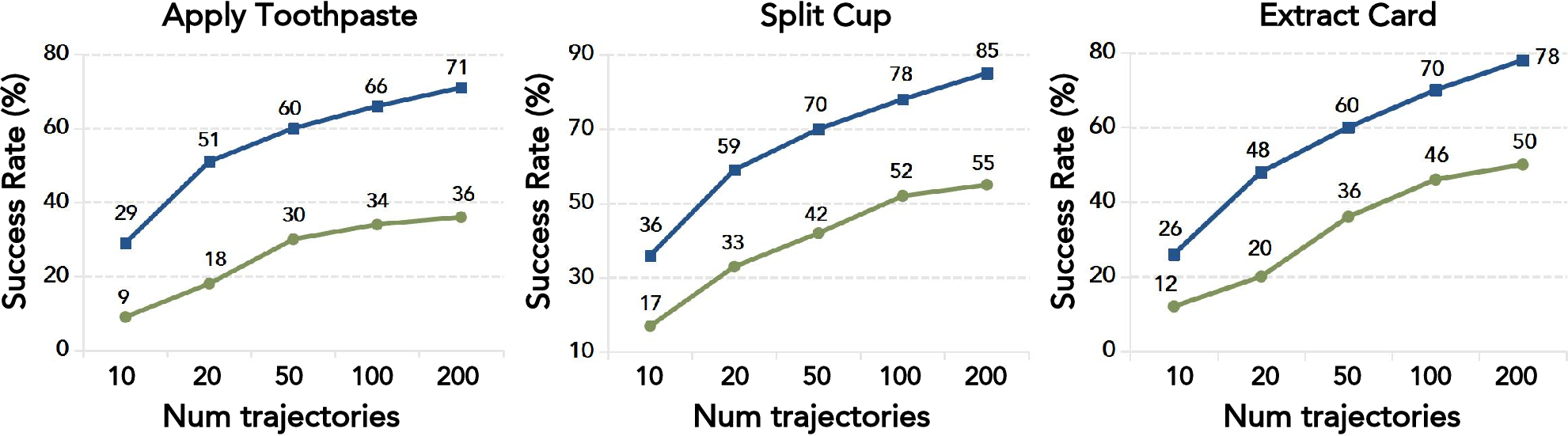
- T‑Rex succeeded much more often—over 30% higher average success rate—than the best competing systems.
- Touch made a big difference: removing touch dropped performance significantly.
- Just adding touch to a standard vision‑language robot model didn’t help much by itself. What mattered was how touch was integrated—fast, reactive, and tightly coupled with action planning.
- The new dataset and training recipe made the robot more data‑efficient: it needed fewer task‑specific demos to learn good behaviors.
Why this matters:
- Many real tasks require feeling as well as seeing—think of fitting parts together, gentle handling, or precise alignment. Vision alone can miss tiny slips or forces.
- Robots that can “feel” and react quickly are safer and more reliable in homes, hospitals, labs, and factories.
What could this lead to?
- Smarter, gentler robots that do chores like loading dishwashers, organizing drawers, or assembling small parts.
- Better assistance in environments where touch matters (like elder care or delicate lab handling).
- Future improvements could come from:
- Longer, more complex tasks (by adding reinforcement learning or online practice),
- Better tactile hardware (more accurate sensors and whole‑hand touch coverage),
- Unifying data from different kinds of touch sensors.
In short
T‑Rex teaches robots to use both sight and touch, with slow, careful planning and fast, fingertip‑level reactions. It learns general skills from massive human videos, then picks up touch reflexes from a focused robot dataset. The result is a more dexterous robot that handles delicate, contact‑rich tasks much better than before.
Knowledge Gaps
Unresolved Gaps, Limitations, and Open Questions
Below is a concise list of concrete research gaps that remain open based on the paper’s methods, dataset, and evaluations:
- Quantify and optimize end-to-end latency: The paper does not report tactile-to-action latency, control loop frequencies per expert, or how performance degrades under higher latency; future work should measure and optimize these budgets for different compute platforms.
- Learn adaptive expert routing and split timing: The MoT uses a fixed τ_split and fixed triggering; investigate learned, uncertainty- or event-driven routing that dynamically chooses τ_split, K_slow/K_fast, and refinement triggers based on tactile/visual confidence.
- Stability and convergence of cascaded flow matching: Provide theoretical and empirical analysis of convergence, stability, and error propagation across split intervals; characterize conditions under which cascaded denoising remains stable.
- Robustness to sensor noise, dropout, and drift: Evaluate and harden the policy against missing packets, noise bursts, and calibration drift in tactile/vision streams; develop self-calibration or online adaptation strategies.
- Cross-sensor and cross-embodiment transfer: It is unclear how well the tactile VQ-VAE and MoT transfer to different hands (e.g., Allegro, Shadow), skins (e.g., GelSight, BioTac), or bimanual geometries; design retargeting procedures, codebook transfer, or domain adaptation for heterogeneous hardware.
- Limited tactile coverage (no palm): Explore algorithms that infer unobserved contact from limited fingertip sensing, or integrate dense palm/whole-hand tactile hardware and unified representations across finger/palm sensors.
- Long-horizon control and memory: Address compounding errors and contact re-coordination across multi-minute tasks; integrate hierarchical planning, memory, or world models to handle sequences with many contact phases.
- Safety-constrained force control: Incorporate explicit force/torque limits, fragility-aware constraints, and safety shields (e.g., control barrier functions) to prevent damage to delicate objects under uncertain contact.
- Failure detection and recovery: Develop tactile-driven slip detection, jam/stall detection, and regrasp/retry strategies for autonomous recovery instead of relying on single-shot rollouts.
- Data scaling laws for tactile mid-training: Characterize how performance scales with tactile mid-training hours and diversity; identify diminishing returns and optimal mixtures of primitives vs. tasks.
- Composition generalization of motor primitives: Rigorously test transfer to novel verb–noun compositions and unseen task factorizations to validate the proposed “primitive-first” data recipe.
- Language grounding and instruction robustness: Quantify sensitivity to instruction paraphrases, ambiguity, and multi-step language; study interactive correction or clarification during execution.
- Vision–tactile fusion under occlusion: Evaluate performance when vision is occluded by hands/objects and quantify how tactile cues compensate; develop occlusion-aware fusion strategies.
- World-model objectives beyond future visual latents: Ablate and extend the auxiliary loss to include future tactile prediction, multi-step forecasting, or contact-event prediction; measure their effect on control.
- Event-driven refinement vs. fixed-rate triggers: Compare fixed offset triggers within action chunks to event-driven refinement keyed by tactile transients (e.g., incipient slip, force spikes).
- Compute footprint and deployability: Report runtime, GPU/CPU utilization, and action rate on embedded platforms; explore distillation or sparsity to meet on-robot real-time constraints.
- Generalization across environments and labs: Validate on different labs, lighting, surfaces, and material properties; study domain randomization and test-time adaptation for real-world variability.
- Benchmark breadth and metrics: Expand beyond 12 tasks and success rates to standardized tactile-reactivity metrics (reaction time to slip, force overshoot, contact stability) and fine-grained error taxonomies.
- Integration with online RL or interaction: Systematically study reinforcement learning, preference optimization, or on-policy data collection to refine contact behaviors where teleoperation data are scarce or suboptimal.
- Sim-to-real for touch: Develop or leverage tactile simulators and contact-rich rendering to pretrain VQ-VAE/codebooks and policies; study real–sim domain gaps for tactile fields and deformations.
- Continual and multi-task learning: Investigate methods to prevent catastrophic forgetting of tactile skills during post-training on new tasks and to accumulate competencies over time.
- Unclear effect size of each modality/component: Provide comprehensive ablations for the future visual prediction expert, language inputs, chunk length, and VQ-VAE codebook size/window to isolate their contributions.
- Bimanual coordination limits: Analyze failure modes in fine bimanual synchronization, contact sharing, and force distribution; explore controllers that explicitly model inter-hand coupling and external perturbations.
- Handling extreme deformables and contaminants: Evaluate on highly deformable, slippery, wet, or dirty objects and sensors; develop cleaning-aware or contamination-robust tactile processing.
Practical Applications
Immediate Applications
Below are concrete, deployable use cases that build directly on the paper’s dataset, model architecture, and training recipe. Each item notes sector(s), a plausible tool/product/workflow, and key assumptions/dependencies that affect feasibility.
- Manufacturing and electronics assembly: precision insertion, fastening, and alignment
- What: Connector insertion, screw/bolt starting, key/lock alignment, cable routing; force-sensitive seating of parts.
- Tool/product/workflow: “T-Rex Tactile Refinement Module” integrated into existing VLA-based robot cells; drop-in MoT tactile expert plugin for closed-loop refinement during assembly.
- Assumptions/dependencies: Availability of multi-finger or dexterous end-effectors with per-finger force/deformation sensing; on-robot compute for high-frequency tactile loops; action retargeting to local robots.
- Lab automation and pharmaceutical handling
- What: Cap screwing, precise pouring/titration (acid-base neutralization analog), tube/stopper insertion, tablet refilling, handling fragile labware.
- Tool/product/workflow: Tactile-aware lab robot controller; workflow to mid-train on facility-specific primitives (pour, twist, seat, press).
- Assumptions/dependencies: Chemical-compatible grippers/sensors; safety interlocks; calibration to local containers and fixtures.
- Warehouse and fulfillment: small, thin, and deformable item handling
- What: Picking thin objects (cards, leaflets), bag opening/bagging, sleeve insertion, garment and flexible packaging manipulation.
- Tool/product/workflow: Facility-specific mid-training recipe using the paper’s “motor-primitive-first” data collection to rapidly cover site objects; tactile VQ-VAE to compress sensor streams for real-time operation.
- Assumptions/dependencies: Suitable tactile hardware on grippers/hands; data synchronization pipeline; minimal post-training demos for site adaptation.
- Service robotics and field operations
- What: Kiosk/ATM maintenance (card extraction), door unlocking, dial/knob adjustment, lightbulb screwing, page turning for accessibility services.
- Tool/product/workflow: Service-robot firmware featuring the asynchronous cascaded flow controller for fast tactile corrections; standardized “service primitives” library.
- Assumptions/dependencies: Access to bimanual or dexterous end-effectors; scene variability handled by large-scale pretraining plus a small number of local demos; compliance with site safety rules.
- Consumer/home assistance (early pilots)
- What: Page turning, toothpaste application onto brushes, bottle cap closure, battery insertion, cable plugging.
- Tool/product/workflow: Assistive-arm controller with tactile-reactive low-level control under a generalist VLA; home-specific fine-tuning with ~100 demos as per the paper’s post-training recipe.
- Assumptions/dependencies: Safe, compact, affordable tactile hands; user-level training workflows; household object diversity addressed via egocentric pretraining priors.
- Quality assurance and fragile goods handling
- What: Egg handling, glassware placement, force-thresholded probing/fit-checking to reduce scrap/rework.
- Tool/product/workflow: Tactile-threshold watchdog integrated into MoT tactile expert; logging of micro-slip/force anomalies for QA.
- Assumptions/dependencies: Reliable sensor calibration; threshold tuning per product; traceability requirements.
- Robotics R&D and education
- What: Benchmarking tactile-reactive manipulation; studying high-frequency closed-loop control; curriculum modules on visuo-tactile learning.
- Tool/product/workflow: Immediate use of the T-Rex Dataset (100 hours) and 12-task benchmark; reuse of the spatial-temporal tactile encoder (VQ-VAE) and asynchronous cascaded flow matching code.
- Assumptions/dependencies: Dataset/code licensing and documentation; mapping to available hands/sensors in academic labs.
- Safety in collaborative robotics (cobots)
- What: Force-aware motion with immediate tactile-triggered corrective actions to limit contact forces during close HRI.
- Tool/product/workflow: Safety middleware that gates actions via the high-frequency tactile expert; audit logs for safety cases.
- Assumptions/dependencies: Certified safety layers remain in charge; tactile expert latency budgets met on deployed compute; compliance with ISO/TS standards.
- Data and MLOps tooling for tactile-vision synchronization
- What: Standardized capture of synchronized camera+tactile+robot states; on-device tactile encoding to reduce bandwidth.
- Tool/product/workflow: “Tactile Logger + VQ-VAE Edge Codec” SDK; automated alignment and QA dashboards.
- Assumptions/dependencies: Sensor vendors expose timestamps/APIs; stable firmware; consistent sampling rates.
- Vendor plugins for existing VLA stacks
- What: Upgrading vision-only policies with tactile-aware action refinement.
- Tool/product/workflow: MoT “tactile expert” plugin and an inference scheduler that reuses cached visual-language keys/values for fast loops.
- Assumptions/dependencies: Access to backbone VLA latent states; modest code changes to inference graph; domain adaptation of tactile tokens.
- Policy and procurement guidance (near-term)
- What: Recommending tactile sensing and closed-loop touch control for collaborative, force-sensitive tasks to reduce incident rates.
- Tool/product/workflow: Checklists for integrators specifying tactile sensor coverage, calibration regimen, and logging standards.
- Assumptions/dependencies: Stakeholder buy-in; alignment with existing safety frameworks; vendor-agnostic guidelines.
Long-Term Applications
These use cases are promising but require advances in hardware robustness, standardization, regulation, or extended research (e.g., long-horizon RL, whole-hand sensing).
- Healthcare: surgical and bedside procedures
- What: Catheter insertion, IV placement, suturing/knot tying, dressing changes, assistive feeding with contact compliance.
- Tool/product/workflow: Sterile, fully washable dexterous hands with dense fingertip/palm sensors; closed-loop tactile-reactive surgical subroutines.
- Assumptions/dependencies: Regulatory approval, traceable safety validation, sub-millimeter precision, sterilization-compatible sensors, redundant fail-safes.
- Consumer humanoids for general household tasks
- What: Robust dishwashing, laundry handling, cable management, appliance knobs, furniture assembly.
- Tool/product/workflow: Cost-down tactile sensor arrays; onboard co-processors running the fast tactile expert; home adaptation workflows.
- Assumptions/dependencies: Affordable, durable dexterous hands; long-horizon task decomposition layered over T-Rex-like control; reliable self-calibration.
- Extreme environments: nuclear, offshore, space, disaster response
- What: Valve operation, connector/seal maintenance, panel fastening, debris removal with sensitive contact control.
- Tool/product/workflow: Radiation/temperature/pressure-hardened tactile arrays; teleoperation + autonomous tactile-reactive loops for latency compensation.
- Assumptions/dependencies: Ruggedized hardware, sealed sensors, low-latency comms or local autonomy; safety cases for mission-critical operation.
- Agriculture and food handling
- What: Delicate fruit picking, grafting, pruning, produce packing without bruising.
- Tool/product/workflow: Field-robust tactile fingers with washable skins; farm-specific mid-training on primitives (pluck, twist, press, clip).
- Assumptions/dependencies: Outdoor robustness to dust/water/UV; seasonal re-calibration; high-throughput arms.
- Micro-assembly and semiconductor back-end
- What: Handling micro-connectors, sockets, fragile substrates with gentle forces and precise seating.
- Tool/product/workflow: Metrology-integrated tactile control (vision + force + position encoders); sub-micron calibration stacks.
- Assumptions/dependencies: Ultra-precise hands and sensors; vibration isolation; integration with fab toolchains.
- Advanced prosthetics and exoskeletons
- What: Tactile-reactive grasp and manipulation for daily tasks using myoelectric control with haptic feedback loops.
- Tool/product/workflow: On-prosthetic tactile VQ-VAE encoder; embedded MoT tactile expert co-processor; personalization via small demo sets.
- Assumptions/dependencies: Comfortable, reliable tactile skins; safe, low-latency control; clinical validation and reimbursement pathways.
- Standardization of tactile data and benchmarks
- What: Cross-vendor tactile schemas, time-sync specs, and open benchmarks for contact-rich manipulation.
- Tool/product/workflow: Industry consortium releasing tactile dataset formats, calibration procedures, and certification tests modeled after the T-Rex benchmark.
- Assumptions/dependencies: Multi-stakeholder cooperation (robot OEMs, sensor makers, integrators, regulators).
- High-fidelity tactile simulation and sim2real
- What: Physics-based simulators that model micro-slip, deformation, and friction for pretraining and RL.
- Tool/product/workflow: Differentiable visuo-tactile simulators; synthetic-to-real domain adaptation for tactile VQ-VAE codes.
- Assumptions/dependencies: Accurate contact/friction modeling; scalable rendering; validated sim2real transfer.
- Long-horizon autonomy via online RL and self-correction
- What: Tactile-reactive refinement combined with high-level planners for multi-step tasks under uncertainty.
- Tool/product/workflow: Safe RL on real robots with tactile-triggered curriculum; off-policy learning from tactile logs.
- Assumptions/dependencies: Safe exploration protocols; fallback supervisors; robust reward shaping from tactile events.
- Hardware-software co-design: tactile co-processors
- What: Dedicated chips for spatio-temporal tactile encoding and high-frequency denoising loops.
- Tool/product/workflow: Edge ASICs/NPUs implementing the tactile expert and VQ-VAE; standardized sensor buses with time alignment.
- Assumptions/dependencies: Sufficient market demand; vendor ecosystem; energy/thermal constraints on mobile robots.
- Workforce development and reskilling
- What: Training operators and technicians to collect motor-primitive data and maintain tactile systems.
- Tool/product/workflow: Certification programs using the T-Rex dataset/benchmark and open-source training recipes.
- Assumptions/dependencies: Curriculum development; academic–industry partnerships; on-the-job training incentives.
- Policy and regulation (future-facing)
- What: Safety standards that explicitly recognize tactile-reactive control in collaborative and medical robots; data logging requirements for incident forensics.
- Tool/product/workflow: ISO/IEC technical specs for tactile sensor calibration, drift monitoring, and closed-loop response times.
- Assumptions/dependencies: Maturity of evidence base; regulator engagement; harmonization across regions.
Glossary
- Action expert: A specialized sub-network that plans low-frequency actions by denoising from noise toward an intermediate state. "The action expert generates a low-frequency action plan"
- Asynchronous Tactile-Reactive Cascaded Flow Matching: A two-stage flow-matching scheme that splits slow visuomotor planning from fast tactile refinement for reactive control. "Asynchronous Tactile-Reactive Cascaded Flow Matching"
- Bimanual dexterous manipulation: Two-handed, high-degree-of-freedom robotic manipulation requiring coordinated, precise control. "a 100-hour bimanual dexterous manipulation dataset"
- Cascaded Denoising Inference: An inference procedure where an action plan is first denoised by a slow expert and then refined by a fast tactile expert. "Cascaded Denoising Inference"
- Closed-loop control: Control that continuously uses feedback (e.g., tactile) to adjust actions in real time. "high-frequency closed-loop control"
- Conditional flow matching: A generative training method that learns a vector field to transform noise into actions conditioned on multimodal context. "action generation is formulated as conditional flow matching."
- Contact-rich manipulation: Tasks that depend heavily on force and contact dynamics, requiring tactile feedback for success. "contact-rich manipulation"
- Deformation map: A spatial representation of tactile surface deformations used to infer contact geometry and forces. "deformation map"
- Egocentric pre-training: Pretraining on first-person human videos to learn broad visuomotor priors before robot-specific training. "large-scale human egocentric pre-training"
- End-effector delta control: Commanding relative changes in the end-effector pose rather than absolute targets. "relative end-effector delta control"
- Euler steps: Discrete integration steps of the Euler method used to iterate the denoising process. "we use N=10 of Euler steps"
- Flow-based robot policies: Policies that generate actions by learning continuous flows from noise to data. "Following standard flow-based robot policies"
- Flow matching: Training that aligns a learned velocity field with the difference between noisy and clean states along a linear interpolant. "split the flow-matching trajectory"
- Latent expert: A model component that predicts future visual representations to provide temporally grounded context for control. "The latent expert processes visual and language observations"
- Mixture-of-Transformer-Experts (MoT): An architecture with multiple transformer “experts” specialized for different sub-tasks that are combined during training and inference. "Built on a Mixture-of-Transformer-Experts (MoT) architecture,"
- Motion retargeting: Mapping human motion trajectories into a robot’s action space to supervise action learning. "retargeted human arm and hand motions"
- Motor primitives: Reusable, elementary action units (e.g., push, slide, insert) that compose complex behaviors. "motor primitives"
- Spatial-temporal tactile encoder: An encoder that fuses spatial deformation and temporal force signals into tactile tokens. "spatial-temporal tactile encoder"
- Spatio-temporal VQ-VAE: A vector-quantized autoencoder that discretizes tactile sequences to capture fine-grained temporal dynamics. "a spatio-temporal VQ-VAE to capture fine-grained tactile dynamics"
- Tactile expert: The high-frequency expert that refines intermediate actions using real-time tactile observations. "The tactile expert then reuses the cached visual-language context"
- Tactile-reactive manipulation: Manipulation policies that rapidly adjust actions based on tactile feedback for agile dexterity. "tactile-reactive manipulation"
- Teleoperation dataset: A dataset collected via human-operated robot demonstrations, often synchronized with tactile signals. "tactile-synchronized teleoperation dataset"
- Variable-rate Mixture-of-Transformers (MoT): A MoT design where experts operate at different frequencies (slow visuomotor planning and fast tactile refinement). "a variable-rate Mixture-of-Transformers (MoT)"
- Vision-Language-Action (VLA): Unified multimodal models that consume vision and language to produce robot actions. "Vision-Language-Action (VLA) models"
- Visuomotor planning: Planning control actions from visual inputs, often at a lower frequency than tactile control. "low-frequency visuomotor planning"
- Visuo-tactile data: Synchronized visual and tactile sensor streams used jointly for learning manipulation. "visuo-tactile data"
- VQ-VAE: Vector-Quantized Variational Autoencoder that compresses continuous inputs into discrete code tokens. "A per-finger VQ-VAE compresses the recent force history"
- Zero-shot: Performing a task without task-specific fine-tuning after pretraining or mid-training. "zero-shot contact-rich manipulation capabilities"
Collections
Sign up for free to add this paper to one or more collections.