- The paper shows that minimal embodied interaction robustly grounds numerical cognition, achieving 96.8% accuracy with only 10% of the training data.
- It employs a visuo-motor LSTM architecture integrating AlexNet-based visual and motor signals to surpass vision-only models, regardless of curriculum order.
- The study finds that structural priors, rather than direct motor signals, mediate efficient, human-like numerical representations and learning dynamics.
Minimal Embodiment Enables Efficient Learning of Number Concepts in Robots
Introduction
The study "Minimal Embodiment Enables Efficient Learning of Number Concepts in Robot" (2604.11373) systematically dissects how sensorimotor embodiment impacts the acquisition of abstract numerical concepts in artificial systems. Through a series of rigorous experiments employing a Franka Panda manipulator, the authors demonstrate that minimal embodied interaction, realized without humanoid morphology, robustly grounds numerical cognition and enables effective, scalable learning mechanisms. Notably, the investigation resolves the source of the data efficiency gains to structural priors rather than information gain from motor signals, and elucidates emergent computational and representational parallels between artificial neural networks and biological cortex.
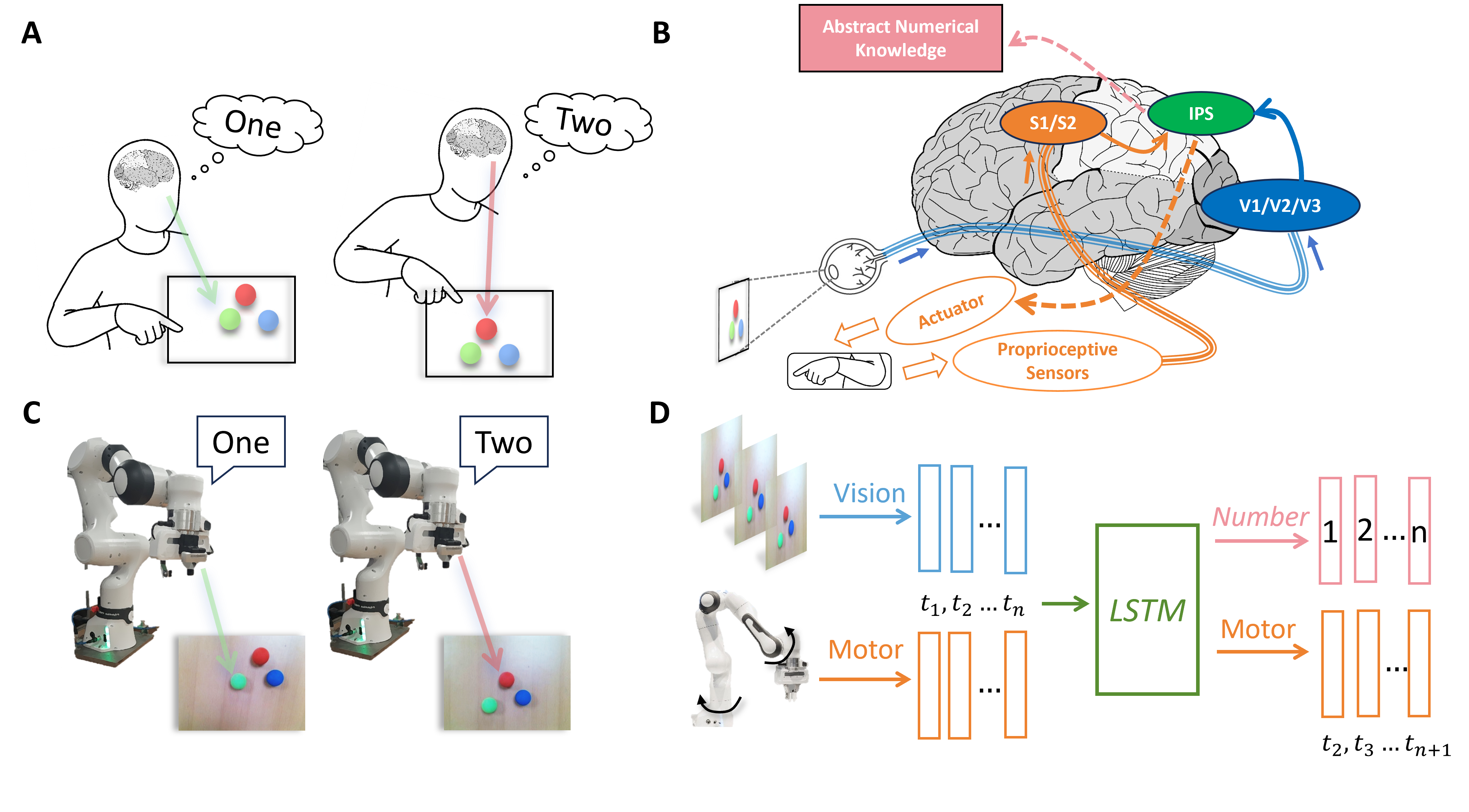
Figure 1: Overview of embodied numerical cognition from human pointing and IPS integration to the Franka Panda platform and the model's visuo-motor LSTM architecture.
Experimental Framework
A 7-DOF Franka Panda manipulator equipped with a wrist-mounted RGB-D sensor sequentially counted colored objects on a tabletop (Figure 1). The dataset comprised synchronized egocentric images and joint angles, offering both visual and proprioceptive streams. The core model integrates an AlexNet-based visual encoder, a motor encoder, and a two-layer LSTM. The network jointly predicts number (1--10) via a softmax head and next-step motor state as an auxiliary target.
Contrastive baselines included: (1) single-image CNN classifiers, and (2) sequential-image networks with pooled visual features but no explicit motor or recurrence signal. ImageNet-pretrained and randomly-initialized models were systematically compared, and data efficiency was probed by varying training set size.
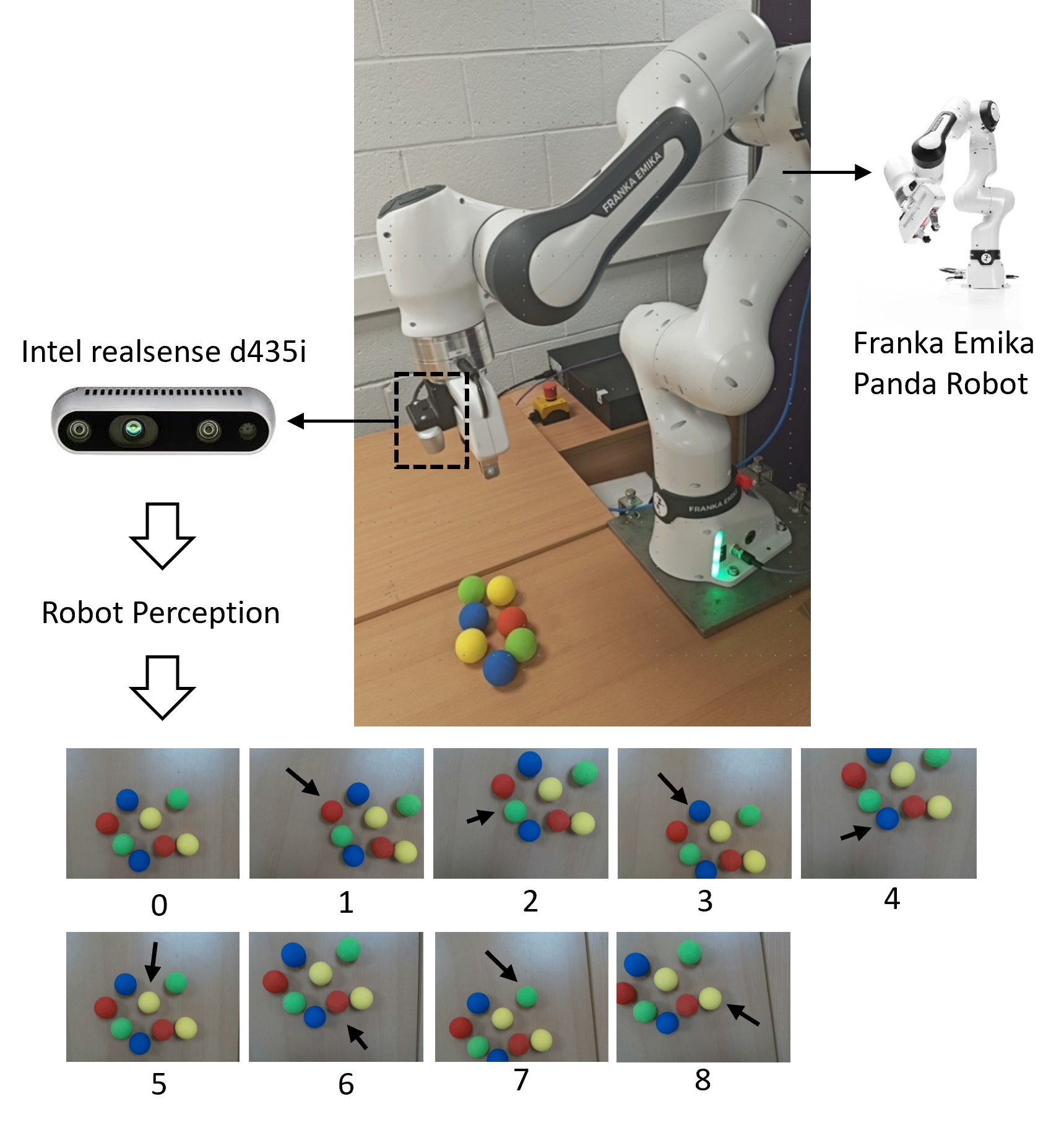
Figure 2: The Franka Panda system actively segments and centers objects for counting via closed-loop visuo-motor control.
Superior Data Efficiency and Distinctive Dynamics Through Embodied Learning
Embodied models exhibited a marked advantage over vision-only baselines in all regimes, but the differential grew under data-constrained conditions. With only 10% of the dataset, the fully embodied model with ImageNet pretraining achieved 96.8% accuracy, in contrast to 60.6% for the best vision-only baseline. Remarkably, negative transfer occurred in vision-only models upon pretraining, highlighting the bias misalignment between object-centric representation pretraining and the requirements of exact object numerosity discrimination; this effect is consistently neutralized by the presence of motor priors.
The learning dynamics are deeply distinct. Vision-only models exhibit rapid, saturating improvements followed by early plateaus, whereas embodied models display a latent period (20–50 epochs) then transition into rapid, monotonic gains, ultimately surpassing vision-only maxima as representations coalesce. Grad-CAM analyses show that embodiment anchors visual attention, maintaining focused discriminative saliency on relevant items, a property that vision-only and especially pretrained models lack, often dispersing attention to background distractors, particularly for small numerosities.
PCA of the learned visual features reveals that embodied models organize numerical information linearly (mirroring the mental number line), while vision-only models encode a distorted U-shaped geometry impairing ordinal discrimination.
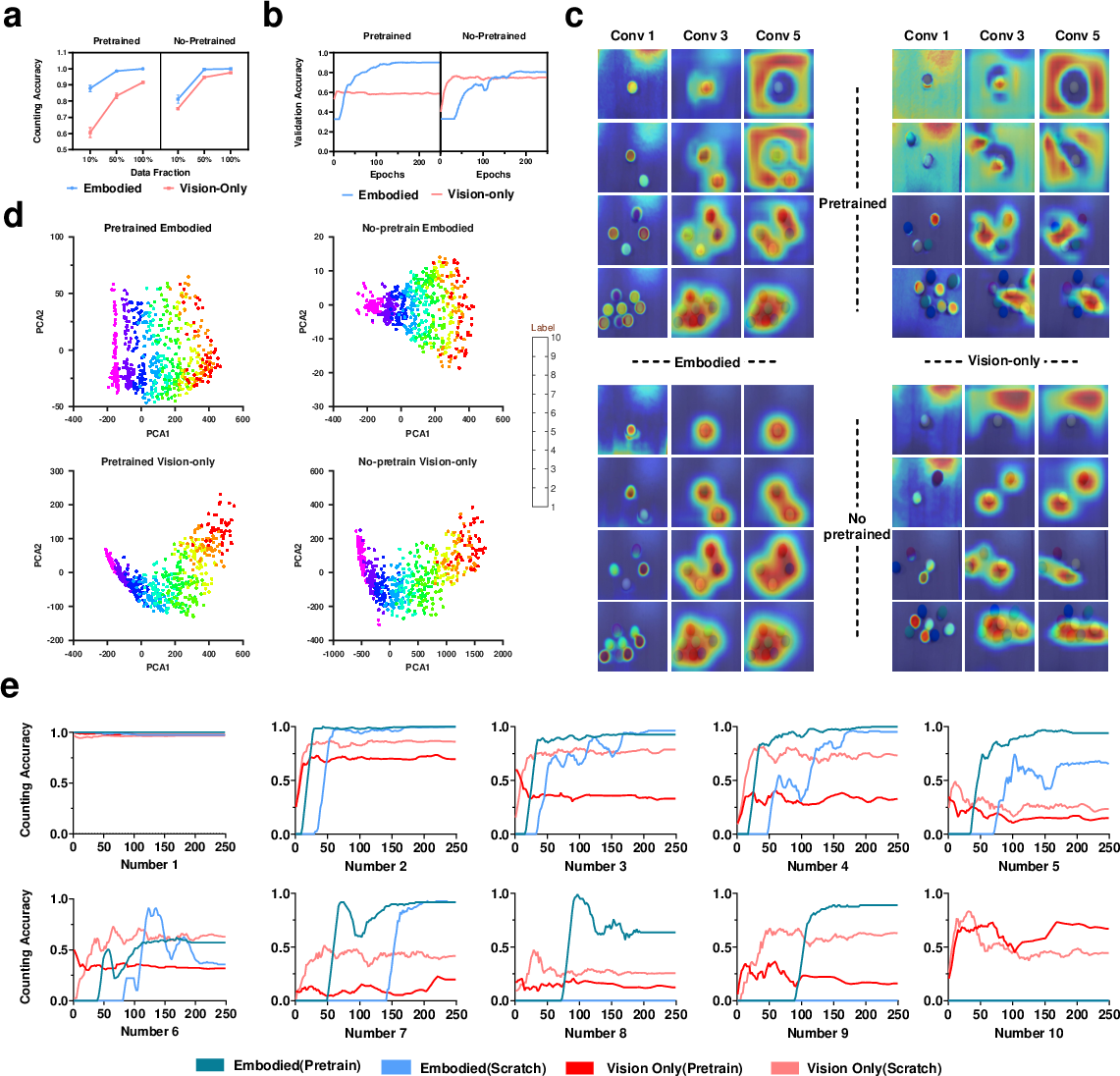
Figure 3: Embodied networks display superior accuracy, efficient learning dynamics, focused Grad-CAM attention, and a mental number line organization in PCA space (top row) with sequential acquisition of numerical concepts.
To disentangle the mechanistic contribution of action signals, the authors introduced a “shuffle” manipulation, randomly permuting motor state labels across training samples (thus eliminating veridical visuo-motor correspondence while preserving an auxiliary joint prediction loss). Strikingly, shuffling leaves number prediction accuracy and learning dynamics entirely unimpaired, while motor prediction error substantially increases. All qualitative and quantitative markers of the embodiment advantage are maintained—proving that motor coupling acts as a structural prior, regularizing representation space and learning trajectories, not as a source of direct task-relevant information.
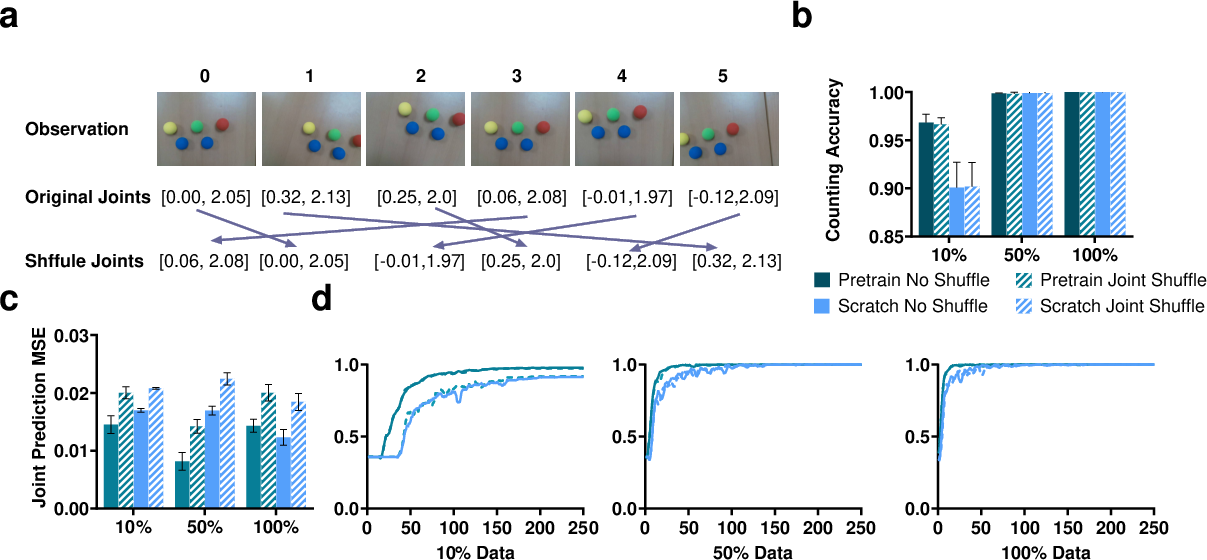
Figure 4: Randomizing visuo-motor pairing impairs joint prediction but leaves counting accuracy and learning dynamics unchanged: the embodiment boost is from a structural prior.
Human-Like Developmental Trajectories and Curriculum Invariance
The model’s per-number acquisition exhibits a stepwise developmental profile identical to empirical findings in children, progressing from reliable identification of small sets (“subset-knowers”) to eventual mastery of the full range (“cardinal principle”). Importantly, this developmental trajectory is impervious to the order in which examples are presented. Whether the curriculum was easy-to-hard, hard-to-easy, or random, the acquisition order remains small-to-large (1 → 2 → 3 ...), reflecting an intrinsic computational constraint rather than a pedagogical artifact. Nevertheless, random curricula yield the highest final accuracy, especially in low-data settings, while hard-to-easy ordering consistently underperforms, consistent with incremental learning theory.
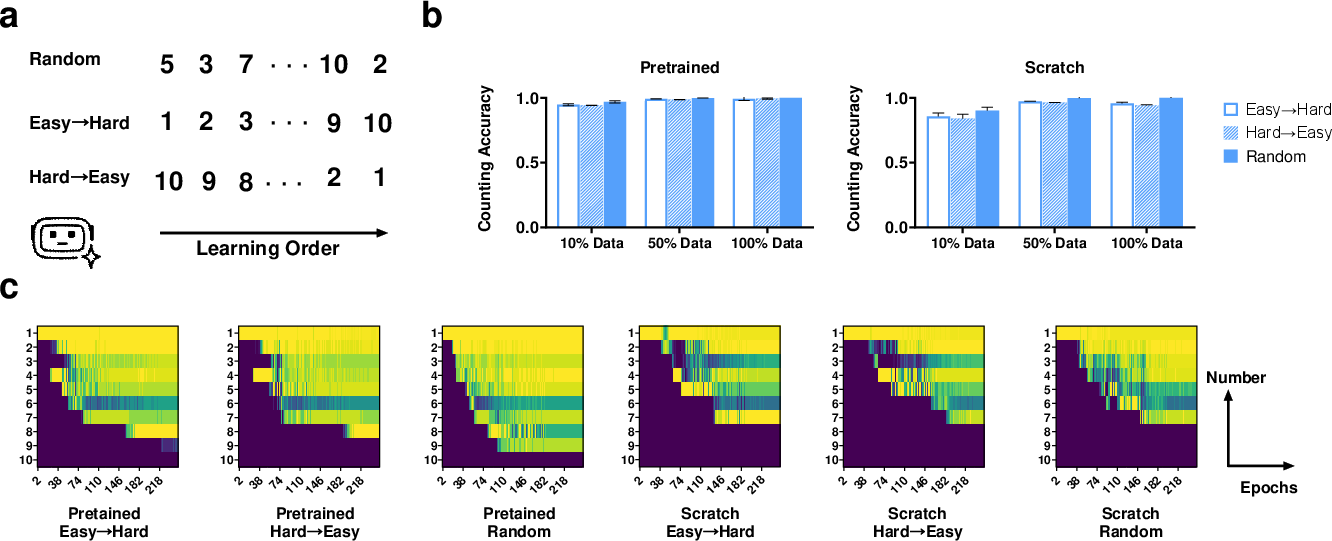
Figure 5: Random and easy-to-hard curriculum conditions support better generalization, but the small-to-large per-number acquisition order persists universally, demonstrating curriculum-invariant developmental constraints.
Emergent Biologically Plausible Representations and Dynamics
Analysis of LSTM activations reveals the spontaneous emergence of number-selective units with sharply tuned, peaked responses, including both positive and negative monotonic coding, and logarithmic scaling in population responses, mirroring neural findings from primate IPS. Representational similarity analyses confirm that the learned latent spaces encode a robust, linear number line with compressive scaling for large magnitudes (Weber-Fechner law).
Most notably, jPCA exposes a dominant rotational dynamic in neural trajectories during counting sequences. The model traverses a single cycle in low-dimensional state space, with the rotational phase linearly encoding the count value (r=0.97, slope ≈ 30.6∘/count). This property persists regardless of data regime, curriculum, or visuo-motor shuffling, indicating a convergent computational motif for discrete sequential processing akin to the organization of biological population dynamics in parietal and motor cortices.
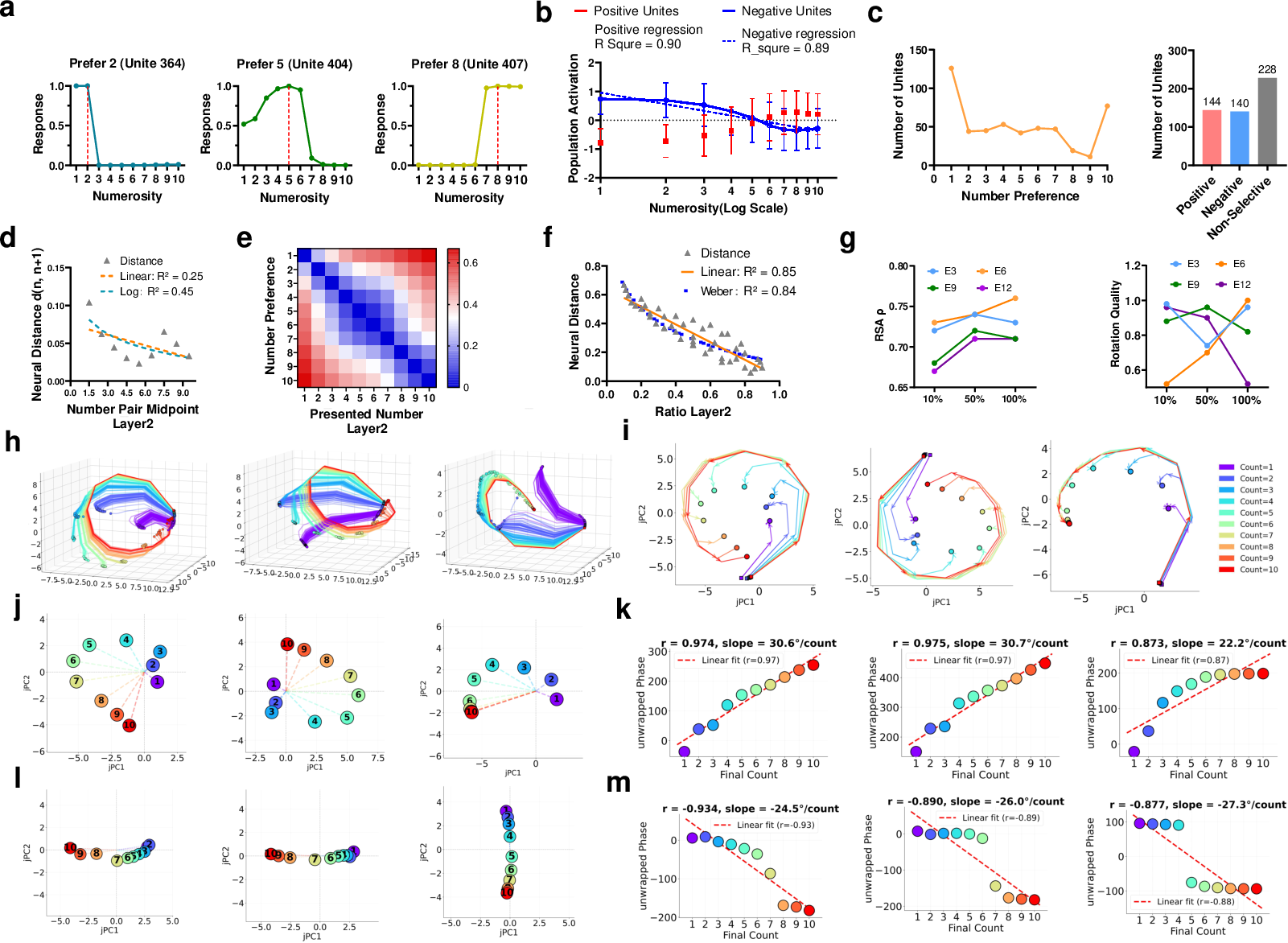
Figure 6: Number-selective tuning, logarithmic and compressed neural codes, a canonical number line, and jPCA-exposed rotational dynamics encoding count progress in the LSTM.
Implications and Future Directions
These findings establish that minimal embodiment, even without veridical sensorimotor structure, serves as an effective structural prior for abstract concept learning, yielding not only robust, data-efficient performance but also emergent representational and temporal motifs homologous to those in biological numerical cognition. The result generalizes embodiment effects beyond human-like morphologies, identifying temporal synchronization and auxiliary consistency losses as core drivers.
From an applied perspective, this blueprint offers a scalable strategy for efficient, interpretable concept acquisition in robotics and safety-critical autonomous systems. The spontaneous alignment with human cognitive development and neural coding principles has direct implications for embodied mathematics education and for cognitive developmental robotics.
Empirical limitations center on the dataset’s Zipfian skew toward small numerosities and the restriction to a single morphology and task. Future work should extend these analyses to larger number spaces, alternative morphologies, manipulation-rich tasks, and symbolic arithmetics. Cross-comparisons with neural data and extension to other abstract domains—spatial, linguistic, logical—are natural next steps. Analytical techniques such as jPCA and RSA are portable to other network architectures, e.g., Transformers, to dissect emergent dynamical motifs across AI substrates.
Conclusion
Minimal, even structurally symbolic, embodiment substantially regularizes abstract concept learning, yielding pronounced data efficiency, curriculum-invariant, developmentally-aligned trajectories, and representations isomorphic to those found in biological cortex. This work crosscuts cognitive science, developmental robotics, and computational neuroscience, providing both a theoretical foundation and practical design principles for the next generation of data-efficient, interpretable, and cognitively plausible AI systems.

