HydroShear: Hydroelastic Shear Simulation for Tactile Sim-to-Real Reinforcement Learning
Abstract: In this paper, we address the problem of tactile sim-to-real policy transfer for contact-rich tasks. Existing methods primarily focus on vision-based sensors and emphasize image rendering quality while providing overly simplistic models of force and shear. Consequently, these models exhibit a large sim-to-real gap for many dexterous tasks. Here, we present HydroShear, a non-holonomic hydroelastic tactile simulator that advances the state-of-the-art by modeling: a) stick-slip transitions, b) path-dependent force and shear build up, and c) full SE(3) object-sensor interactions. HydroShear extends hydroelastic contact models using Signed Distance Functions (SDFs) to track the displacements of the on-surface points of an indenter during physical interaction with the sensor membrane. Our approach generates physics-based, computationally efficient force fields from arbitrary watertight geometries while remaining agnostic to the underlying physics engine. In experiments with GelSight Minis, HydroShear more faithfully reproduces real tactile shear compared to existing methods. This fidelity enables zero-shot sim-to-real transfer of reinforcement learning policies across four tasks: peg insertion, bin packing, book shelving for insertion, and drawer pulling for fine gripper control under slip. Our method achieves a 93% average success rate, outperforming policies trained on tactile images (34%) and alternative shear simulation methods (58%-61%).
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What this paper is about
Robots often have to touch, push, slide, and squeeze things to do useful work (like inserting a peg into a hole or opening a drawer). To learn these skills safely and cheaply, we want to train robots in simulation (a virtual world) and then use the same skills in the real world. This paper introduces HydroShear, a new way to simulate the “feel” of touch—especially sideways rubbing and sliding forces called shear—so that robots trained in simulation can succeed in real, touch-heavy tasks without any extra tuning.
The big questions the paper asks
- Can we simulate touch in a way that includes realistic sliding, sticking, and slipping between a robot’s fingertips and objects?
- If we train robot policies (their decision rules) using this simulated touch, will those policies work in the real world right away (zero-shot), without retraining?
- Is this new simulator more accurate and useful than previous touch simulators?
How the method works (in everyday terms)
Think of a robot finger covered with a soft, stretchy pad (like a thick balloon or sponge). When the finger presses on an object:
- Dilation: pressing straight in squashes the pad (like pushing down on a sponge).
- Shear: sliding or twisting stretches the pad sideways (like rubbing your hand across a rubber sheet).
HydroShear simulates both of these effects accurately and quickly.
Here are the key ideas, explained with simple analogies:
- Hydroelastic model: “Hydro” suggests pressure (like water in a balloon), and “elastic” means stretchy material. The model treats touch as pressure plus stretch in a soft layer, capturing how it builds up and changes over time.
- Stick–slip: When you push an object, sometimes it sticks (no movement), sometimes it slips (sudden movement). HydroShear knows when forces are strong enough to cause slipping and adjusts the simulated touch accordingly.
- Path-dependent: The pad doesn’t reset instantly; how it deforms depends on the motion history. Think of a rubber band that remembers recent stretches—HydroShear keeps track of past motion to model this “memory.”
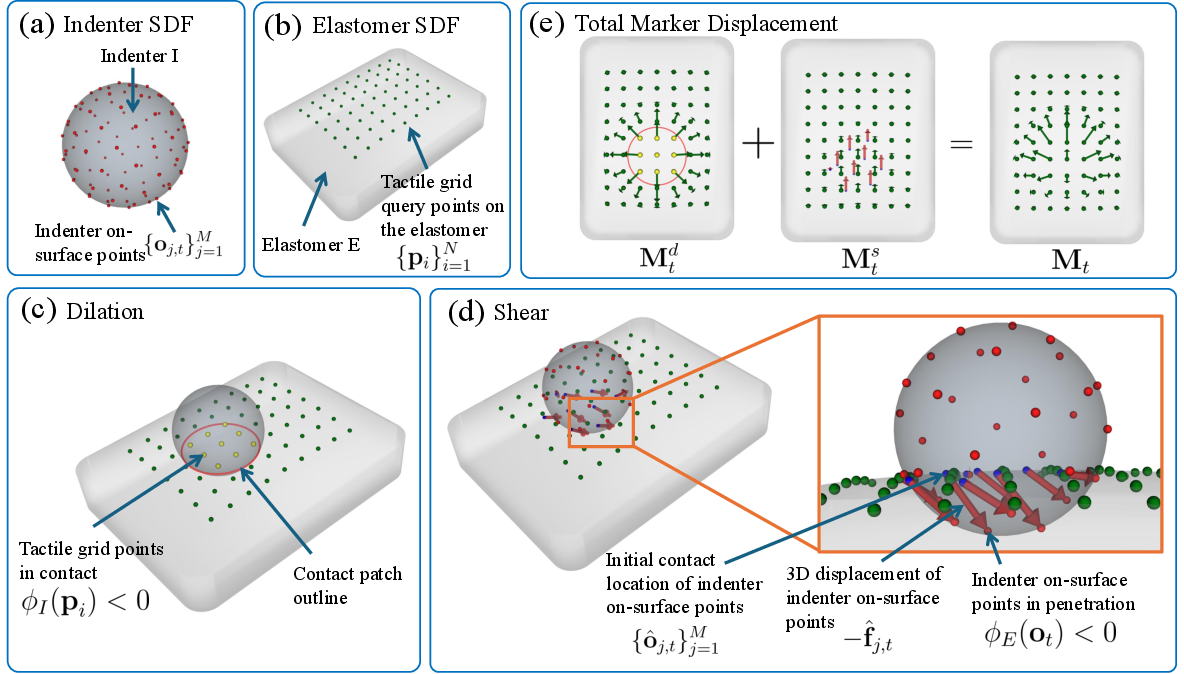
- Signed Distance Functions (SDFs): An SDF is like a map that tells how far a point is from the surface of an object. Negative means “inside,” zero means “on the surface,” positive means “outside.” HydroShear uses SDFs to know exactly where and how the object touches the pad.
- Full 3D motion (SE(3)): The object can move forward/backward/left/right/up/down and rotate in 3D. HydroShear handles all of that, including twisting and rolling, not just flat sliding.
- Tracking surface points and forces: The simulator follows points on the object’s surface as they press and slide across the pad. It converts their motion into forces:
- Normal forces push straight into the sensor (like pressing).
- Tangential forces pull sideways (like sliding).
- Friction limits sideways force before slipping occurs (like tires gripping the road).
- Calibration: To make the simulator match a real sensor, they press a spherical tip onto a real tactile sensor (GelSight Mini), move it in specific ways, and tune four parameters:
- How far the pad’s influence spreads (two “lambda” parameters).
- How stiff the pad is (K).
- The friction level between pad and object (mu).
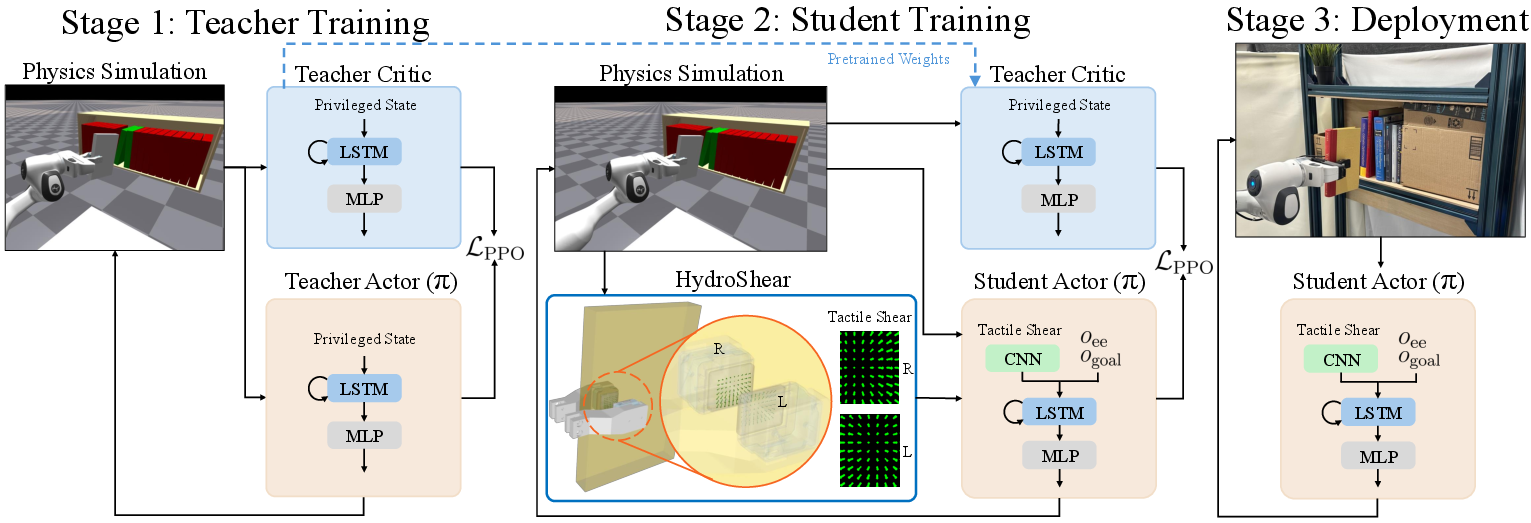
- Training robot policies (teacher–student): In simulation:
- A “teacher” policy is trained first with extra information (like exact object position and forces).
- Then a “student” policy is trained with only realistic inputs (robot joint positions and tactile shear), guided by the teacher’s critic.
- Finally, the student policy is deployed in the real world without any changes (zero-shot).
This is done efficiently on a GPU, so it’s fast enough for large-scale training.
What they found and why it matters
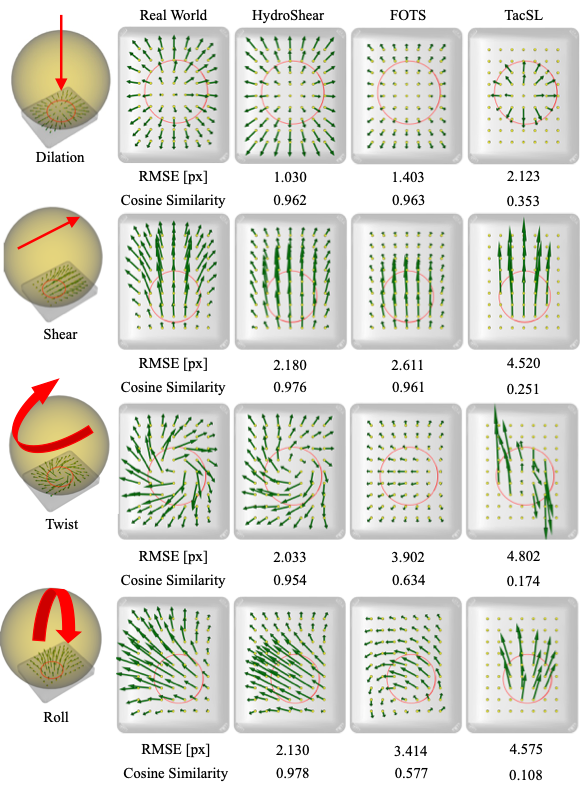
They tested HydroShear against two popular baselines:
- TacSL: a faster but more simplified force model, often focused on images.
- FOTS: a learning-based touch simulator that models certain kinds of motion, mostly in a flat plane.
Results:
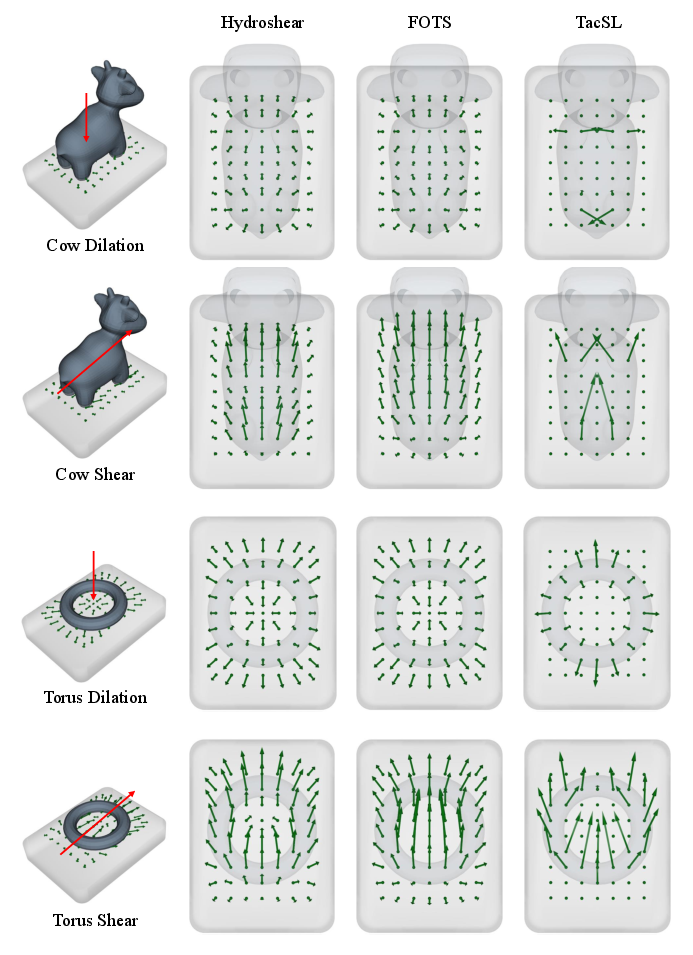
- HydroShear simulated real tactile shear more accurately across different motions: pressing (dilation), sliding (shear), twisting, and rolling. It had lower error and better alignment with real sensor readings.
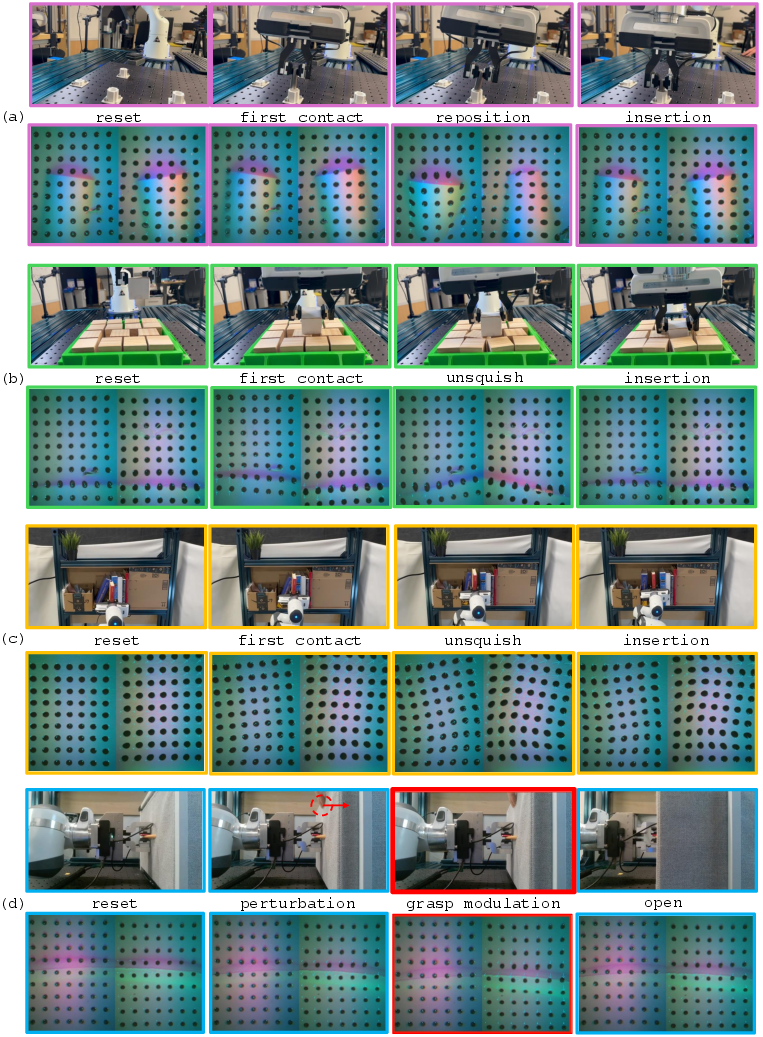
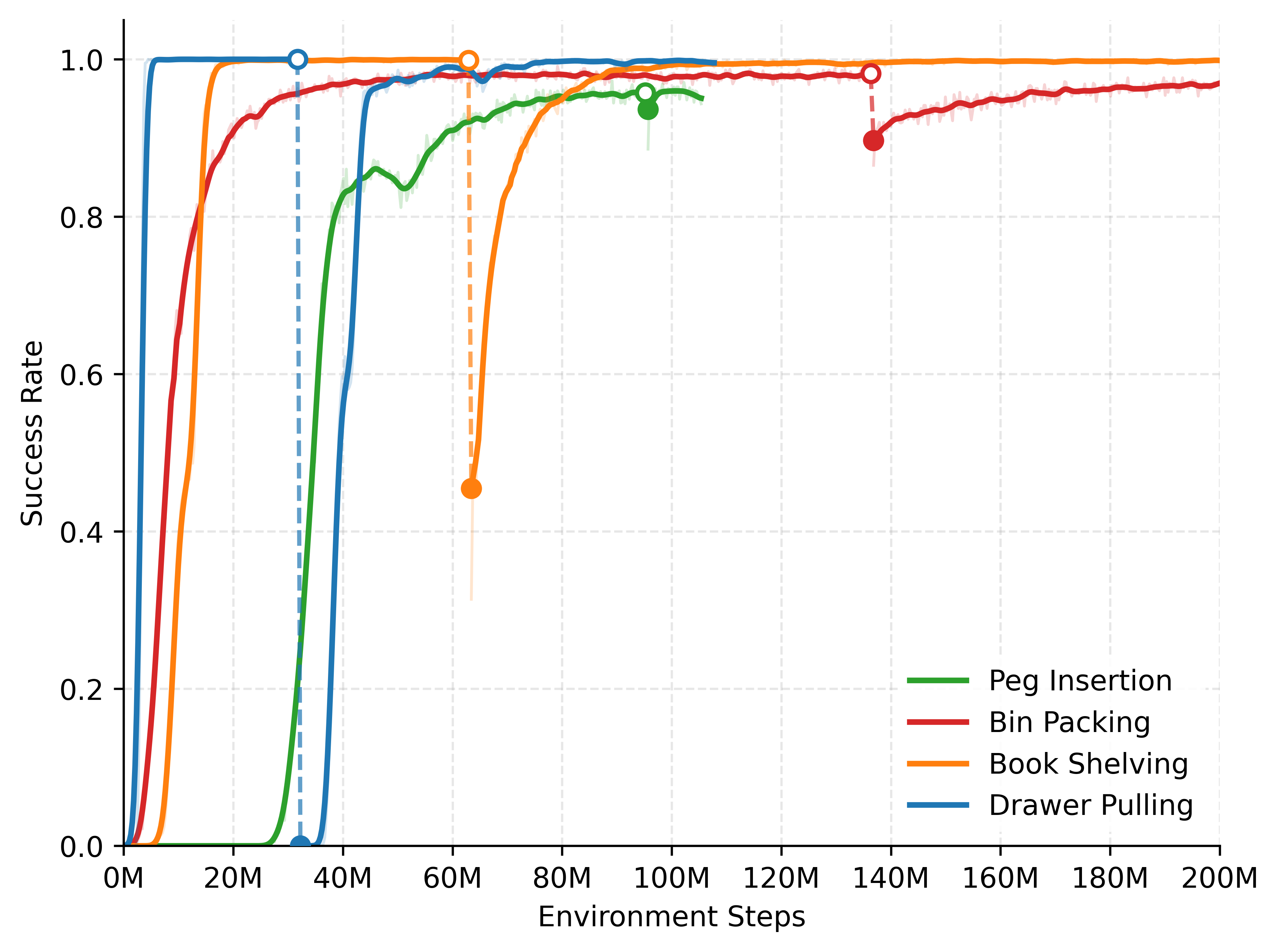
- Policies trained with HydroShear transferred to the real world much better. Across four hard, contact-rich tasks, HydroShear-based policies succeeded in 93% of trials on average, while:
- Tactile image policies succeeded ~34%,
- Other shear simulators succeeded ~58–61%.
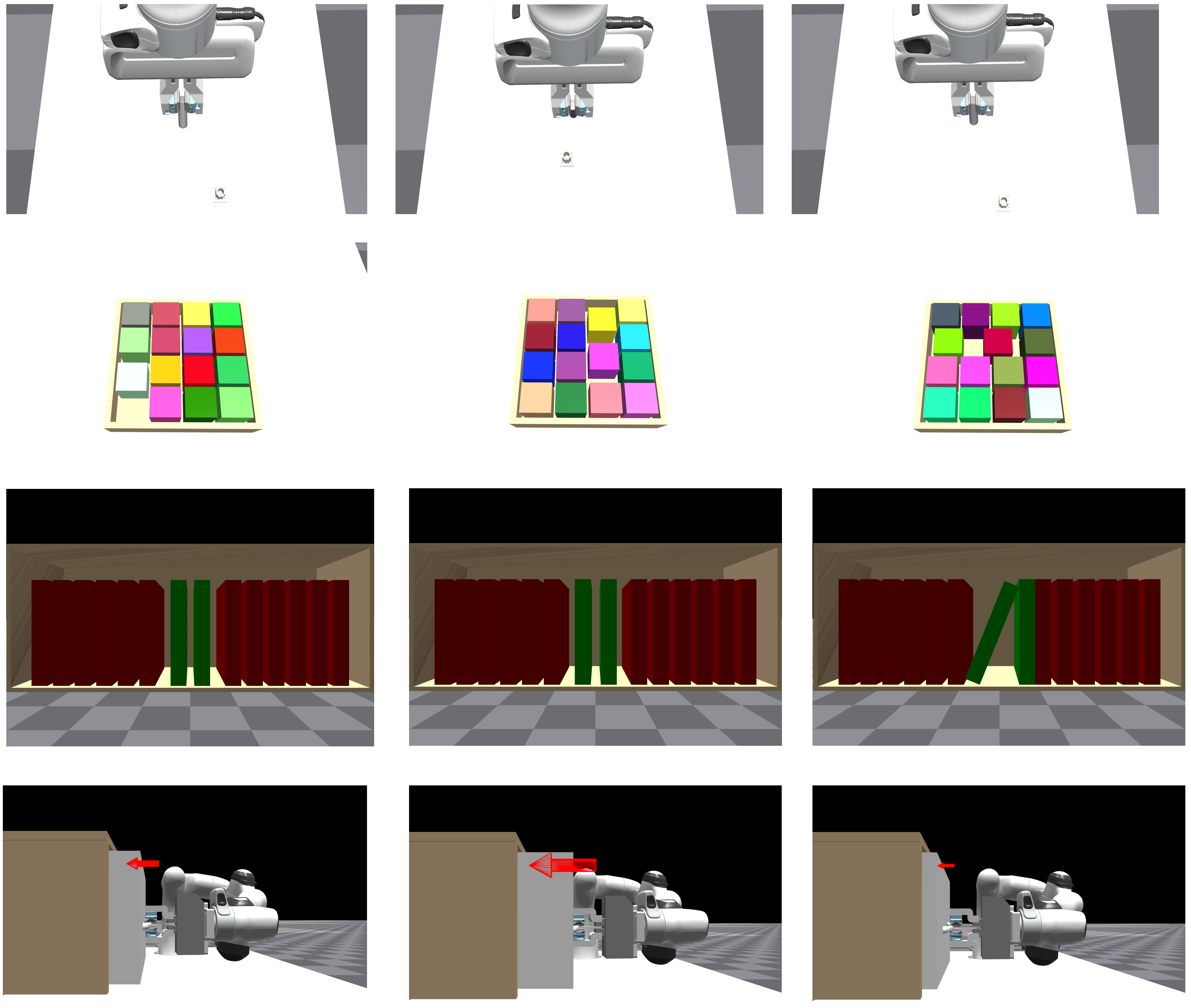
The four tasks were:
- Peg insertion (dealing with uncertain grip and tight fits),
- Bin packing (inserting a cube into a crowded bin with other cubes),
- Book shelving (sliding a book into a shelf sideways, where gravity acts differently),
- Drawer pulling (modulating grip to prevent slipping while opening a drawer under disturbances).
In every case, accurately simulating shear—especially path-dependent stick–slip and full 3D contact—made the biggest difference.
Why this is important
Touch is critical for dexterous manipulation. Cameras can see shapes, but they don’t tell you how slippery a surface is or how forces change as you slide or twist. With HydroShear:
- Robots can learn complex touch-based skills in simulation and use them immediately in the real world.
- Training becomes faster, safer, and cheaper (no endless real-world trials).
- Tasks that need careful force control and awareness of slipping become much more reliable.
What this could lead to
- Better warehouse robots that can pack items tightly and handle different shapes and materials.
- Home robots that can open drawers, place books, assemble objects, and do delicate tasks safely.
- Research tools for studying touch and improving tactile sensors and grippers.
- Scalable training pipelines for many contact-rich tasks, since the simulator is fast and general.
Limitations and future work:
- HydroShear relies on physics engines that allow “soft” penetrating contact; support for hydroelastic contact in more engines would help.
- Extending the method to even more complex materials and sensors could widen its use.
In short: HydroShear teaches robots to “feel” sliding and sticking in a realistic way during training, so they can handle tough, touch-heavy tasks in the real world—right out of the box.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The following list summarizes what remains missing, uncertain, or unexplored in the paper and can guide future research:
- Physics engine reliance: HydroShear requires a simulator that permits penetrating compliant contacts (e.g., Isaac Gym’s Kelvin–Voigt model). It remains unclear how to integrate HydroShear with engines that enforce non-penetration constraints or support hydroelastic contacts natively, and what accuracy/speed trade-offs arise across engines.
- Simplified viscoelastic modeling: The elastomer is modeled with linear stiffness parameters and recursive accumulation, but no explicit rate dependence, relaxation dynamics, or hysteresis beyond path tracking. A more realistic viscoelastic model (e.g., Kelvin–Voigt + Maxwell elements, time constants) and its effect on sim-to-real transfer are not explored.
- Normal vs tangential stiffness conflation: The method assumes (equal normal and tangential stiffness) in parts of the formulation to recover forces from displacements, and only calibrates (not ) separately. The impact of distinct normal/tangential stiffness calibration on fidelity is unknown.
- Constant surface area assumption: Contact forces for on-surface points use a uniform area , which ignores curvature-dependent area elements and spatial variation. How using true local area elements affects accuracy and compute remains open.
- Static elastomer geometry: The elastomer is represented via a fixed SDF , while real elastomer geometry changes under deformation. The consequences of not updating as contact evolves (i.e., neglecting geometry changes and boundary effects) are not characterized.
- Coulomb friction oversimplification: A single constant friction coefficient is used, without modeling velocity-dependent effects (e.g., Stribeck curve), pressure dependence, material coupling, temperature, or surface contamination. Per-material or state-dependent friction modeling and calibration are missing.
- Stick–slip and contact reset: Forces are zeroed when contact breaks (Heaviside reset), potentially oversimplifying micro-slip, adhesion, or residual memory. Investigating partial memory retention or adhesive effects could improve realism.
- Tactile shadowing heuristic: Shadowing is modeled via a radial exponential decay term. There is no explicit modeling of sensor-specific optical artifacts (lighting, marker detection drift, vignetting) or learned shadowing, and the benefits of learned vs. hand-crafted shadowing are not assessed.
- 2D shear focus and z-displacement use: The policy takes 2D shear fields; dilation (normal penetration) is computed but appears not to be used as an observation for RL. Whether adding normal displacement improves policy performance is not evaluated.
- Limited calibration dataset: Parameter identification uses only 10 samples per mode (dilation, shear, twist, rolling) with a single spherical indenter and one GelSight Mini. Robustness to larger, more diverse calibration sets, different indenters, and multiple sensors is unknown.
- Sequential single-variable calibration: Parameters are calibrated independently via single-variable optimization with a rescaling trick. Sensitivity, identifiability, and potential suboptimality versus joint calibration are not analyzed.
- Material-specific calibration: The friction parameter is calibrated with one indenter/surface pair, but tasks involve different materials (wood, paper, metal) and contact finishes. How to estimate material-specific parameters and perform per-object sim-to-real transfer is unresolved.
- Gravity compensation ad hoc: A “gravity effect” compensation is added for displacement-based methods, but the formulation and sensitivity are not detailed. Its effect on fidelity and transfer across different object masses and grasps needs quantification.
- SDF acquisition and fidelity: The approach presumes watertight SDFs of contact objects. Practical pipelines for obtaining accurate SDFs for varied real-world objects (including deformable or textured surfaces) and the impact of SDF errors on tactile simulation are not discussed.
- Multi-object, multi-patch scalability: While examples show multiple contact patches, the computational scaling, numerical stability, and accuracy when many simultaneous contacts occur (e.g., clutter, articulated environments) are not benchmarked.
- Real-time performance and scaling: A speed comparison table is referenced but not provided. Concrete throughput (taxels/sec, envs/sec), memory usage, and scaling behavior with increasing mesh complexity and environment count remain unclear.
- Physical correctness and passivity: The non-holonomic, path-dependent force tracking has not been analyzed for physical consistency (energy conservation, passivity, stability). Formal guarantees or diagnostics for unphysical behaviors are missing.
- Validation against forces/pressure: Evaluation uses per-taxel pixel RMSE and cosine similarity for marker displacements. There is no validation against measured normal/tangential forces or pressure distributions, leaving the physical accuracy of force fields unverified.
- Sensor heterogeneity: Experiments target GelSight Mini only. Generalization to other tactile modalities (capacitive arrays, piezoresistive skins, optical sensors with different marker patterns) and required adaptations are not studied.
- Policy architecture dependence: The teacher–student AACD pipeline is fixed; sensitivity to network architecture, observation choices (e.g., adding dilation), recurrent vs feedforward structures, and alternative training strategies is not explored.
- Domain randomization scope: The extent and types of simulation randomizations (friction, compliance, sensor noise, object mass/geometry) used during RL training are not documented, leaving open how robust the learned policies are to broader real-world variability.
- Robustness and longevity: There is no analysis of long-horizon robustness (e.g., 1000+ cycles), elastomer wear/tear modeling, or how HydroShear-informed policies affect sensor lifespan compared to baselines.
- Generalization to unknown objects: Tasks use known geometries and controlled setups. How policies trained with HydroShear transfer to previously unseen object shapes, sizes, and contact conditions (without per-object recalibration) is untested.
- Failure mode analysis: Detailed failure analyses (e.g., when HydroShear fails under extreme torsion, rapid contact transitions, very soft/rough surfaces) and corresponding mitigation strategies are not provided.
- Integration with differentiable simulation: While HydroShear is GPU-parallelizable and engine-agnostic, integration with differentiable physics for end-to-end policy or parameter learning and its benefits/costs are unexplored.
- Slip detection and control strategies: Drawer pulling relies on “slippage detection,” but the specific detection signals, thresholds, and controller reactions (beyond RL policy) are not described or compared against model-based baselines.
- Spatially varying parameters: Uniform stiffness and shadowing parameters are assumed across the sensor surface. Spatially varying calibration (due to manufacturing tolerances, mounting, and boundary constraints) and its impact on fidelity are not examined.
- Reproducibility and code disclosures: The paper mentions a website and GPU-parallelized implementations (including an improved FOTS), but full details on released code, models, datasets, and calibration scripts necessary for reproducibility are not specified.
Practical Applications
Immediate Applications
Below are concrete ways HydroShear can be used today, based on the paper’s demonstrated zero-shot sim-to-real performance and available tooling.
- [Robotics, Manufacturing] Insertion skills for assembly (pegs, pins, press-fits)
- What: Train and deploy tactile-driven RL policies for tight-tolerance insertions where vision is unreliable or occluded.
- Tools/workflow: CAD-to-SDF pipeline; GelSight (or similar) sensors on grippers; HydroShear in Isaac Gym/Isaac Sim; teacher–student AACD training; zero-shot deployment.
- Assumptions/dependencies: Availability of watertight SDFs; physics engine permitting compliant/penetrating contacts; per-sensor calibration; GPU resources for training; gripper-mounted vision-based tactile sensors.
- [Logistics, Retail Fulfillment] Bin packing and slotting with multi-object contacts
- What: Automate placing items in densely populated bins where contact-rich interactions and occlusions are unavoidable.
- Tools/workflow: Digital twin of bin layouts; HydroShear shear fields to encode multi-contact cues; sim-trained RL policies.
- Assumptions/dependencies: Accurate object geometries; consistent friction; sensor durability under high duty cycles.
- [Industrial Automation, Factory Ops] Handle/panel/drawer manipulation with slip-aware control
- What: Robust opening/closing of drawers, panels, and cabinets using slip detection and gripper width modulation learned in sim.
- Tools/products: Slip-aware gripper controller (policy) trained with HydroShear; ROS2 driver for tactile inputs.
- Assumptions/dependencies: Reliable gripper control loop; calibrated tactile sensors; known ranges of external perturbations.
- [Robotics Software, Simulation Vendors] High-throughput tactile simulation for RL
- What: Replace slow FEM loops with GPU-parallel HydroShear for scalable RL; integrate with Isaac Gym/Sim and other engines.
- Tools/products: HydroShear SDK module; physics-engine-agnostic interface for SDF and contact logging; GPU kernels.
- Assumptions/dependencies: GPU availability; consistent API for SDF queries; simulator support for compliant contact.
- [Academia, Research Labs] Benchmarking and methods development for tactile RL
- What: Reproducible digital twin setups for evaluating tactile shear models, stick–slip, and SE(3) contact policies; ablations on curricula and distillation.
- Tools/workflow: Provided HydroShear implementation; GPU-parallel FOTS reimplementation; calibration scripts; datasets of marker displacement fields.
- Assumptions/dependencies: Access to GelSight Minis (or equivalent) and a robot arm; per-lab calibration.
- [Quality Control, Metrology] Fit-and-finish verification via tactile cues
- What: Train policies to detect misalignment or excessive insertion force through simulated tactile shear signatures.
- Tools/workflow: Offline calibration of allowable shear envelopes; anomaly detection on shear fields during insertions.
- Assumptions/dependencies: Stable material and friction properties; consistent sensor mounting.
- [Collaborative Robotics, Safety] Safer contact behavior through training curricula
- What: Use the paper’s contact-penalty curriculum to discourage aggressive contact, reducing elastomer wear and collision risk.
- Tools/workflow: Teacher–student distillation with contact penalties; on-robot deployment of conservative tactile policies.
- Assumptions/dependencies: Task-relevant reward shaping; access to privileged state in simulation for teacher training.
- [Robotics Integration Services] Rapid prototyping of tactile skills
- What: Consultancy workflows to add tactile-shear-aware insertion and slip handling to existing grippers and cells.
- Tools/workflow: SDF generation from CAD; per-site calibration; policy training and validation on a digital twin; rollout on real cells.
- Assumptions/dependencies: Customer CAD availability; adherence to calibration procedure; integration with PLC/ROS stacks.
- [Education] Hands-on courses in contact-rich manipulation
- What: Use the open-source toolchain to teach tactile sensing, contact modeling, and RL for manipulation.
- Tools/workflow: Lab modules with GelSight Minis; digital twin exercises; graded tasks (peg insertion, bin packing).
- Assumptions/dependencies: Entry-level GPU workstations; low-cost tactile sensors; course time for calibration.
Long-Term Applications
These applications are promising but require further R&D, scaling, or domain adaptation beyond the paper’s current scope.
- [Consumer Robotics, Home Assistance] General household manipulation with tactile intelligence
- What: Book shelving, organizing items in cabinets, and robustly operating household fixtures with limited visual cues.
- Path to deployment: Extend policies to diverse objects, cluttered scenes, and varied home hardware; robustify sensor packaging.
- Assumptions/dependencies: Cost-effective and durable tactile sensors; object SDFs (or on-the-fly SDF estimation); safety certification for home use.
- [Electronics Manufacturing, Micro-Assembly] Precision insertion and alignment at small scales
- What: Tactile-shear-driven micro-insertions (e.g., connectors, fasteners) where visual fiducials are insufficient.
- Path to deployment: Higher-resolution tactile sensing; fine calibration of elastomer models and friction at micro-scales; cleanroom-compatible hardware.
- Assumptions/dependencies: Miniaturized GelSight-like sensors; ultra-precise actuation; materials modeling at micro-contact scales.
- [Healthcare, Surgical Robotics] Tactile-aware manipulation of instruments and soft tissue interactions
- What: Training policies that leverage tactile shear to guide tool insertion and detect slip/adhesion under complex tissue contacts.
- Path to deployment: Adapt hydroelastic model to soft/viscoelastic biological tissues; regulatory approvals; sterile, biocompatible sensors.
- Assumptions/dependencies: Medical-grade tactile hardware; validated tissue models beyond rigid SDFs; real-time constraints.
- [Teleoperation, VR/AR Training] Haptic feedback with realistic stick–slip and path-dependent shear
- What: Operator training and telemanipulation assistance using tactile-shear-informed feedback to improve performance and safety.
- Path to deployment: Real-time bidirectional haptic devices; mapping HydroShear outputs to perceived haptic cues; stability guarantees.
- Assumptions/dependencies: Low-latency pipelines; human factors validation; robust contact stability in closed-loop haptics.
- [Standards, Policy, Certification] Benchmarks and pre-compliance testing for tactile manipulation
- What: Standardized sim-to-real protocols and metrics for contact-rich tasks; datasets and test scenes for certification bodies (e.g., NIST).
- Path to deployment: Cross-lab validation; consensus on sensor models and calibration procedures; integration into procurement/spec standards.
- Assumptions/dependencies: Industry participation; governance for shared datasets; agreement on acceptable sim-to-real error bounds.
- [Agriculture, Food Handling] Gentle manipulation of deformable/fragile items
- What: Tactile-shear-guided handling of soft produce to prevent bruising and slip while packing.
- Path to deployment: Extend HydroShear to deformable-object SDFs or hybrid FEM-lite models; sanitize-ready sensors; variable friction surfaces.
- Assumptions/dependencies: New contact models for soft–soft interactions; environmental robustness (moisture, temperature).
- [Energy, Field Robotics] Control panel operation and maintenance in unstructured environments
- What: Reliable operation of knobs, latches, and drawers in plants/substations under poor visibility.
- Path to deployment: Ruggedized tactile sensors; generalized policies across many hardware types; integration with autonomy stacks.
- Assumptions/dependencies: Outdoor/industrial-grade hardware; large libraries of SDFs or online reconstruction; long-term reliability.
- [Robotics Platforms, Software Ecosystem] Cross-engine tactile modules and auto-calibration suites
- What: Turn-key HydroShear plugins for Gazebo, MuJoCo, Unity; automated per-sensor calibration and friction estimation pipelines.
- Path to deployment: Vendor collaboration; standardized APIs; cloud-based training services for enterprise users.
- Assumptions/dependencies: Sustained maintenance; consistent SDF interfaces; IP considerations for object CAD data.
- [Adaptive, Foundation Skill Libraries] Reusable tactile skills transferable across tasks and robots
- What: Pretrained “skill packs” (insertion, packing, sliding, knob-turning) adaptable via minimal calibration.
- Path to deployment: Meta-RL or policy adaptation layers; breadth of training tasks; interoperability with different grippers/sensors.
- Assumptions/dependencies: Sensor/model generalization; modular interfaces; dataset scale for broad coverage.
Notes on feasibility across applications:
- Critical dependencies include: watertight SDFs of manipulated objects, physics engines that support compliant/penetrating contacts, per-sensor calibration (λd, λs, K, μ), and stable friction conditions.
- Current validation is on rigid-object contacts with GelSight Mini sensors; extending to deformable objects and different sensor types may require new modeling and calibration.
- Training requires GPU resources; runtime policies are lightweight but integration and latency must be managed for real-time control.
- Safety-critical domains (healthcare, collaborative robots) require additional validation, robustness, and compliance processes.
Glossary
- Asymmetric Actor-Critic Distillation (AACD): A teacher–student training scheme where a critic trained with privileged information guides a student policy with limited observations. "Illustration of the teacher-student RL training using Asymmetric Actor-Critic Distillation (AACD)~\cite{tacsl}."
- Coulomb friction: A contact model that limits tangential friction by the normal force times a friction coefficient, governing stick–slip behavior. "Next, we impose that normal forces be lower bounded by zero (no pulling) and enforce Coulomb friction by clipping the magnitude of the tracked tangential friction force by the normal force scaled by the coefficient of friction:"
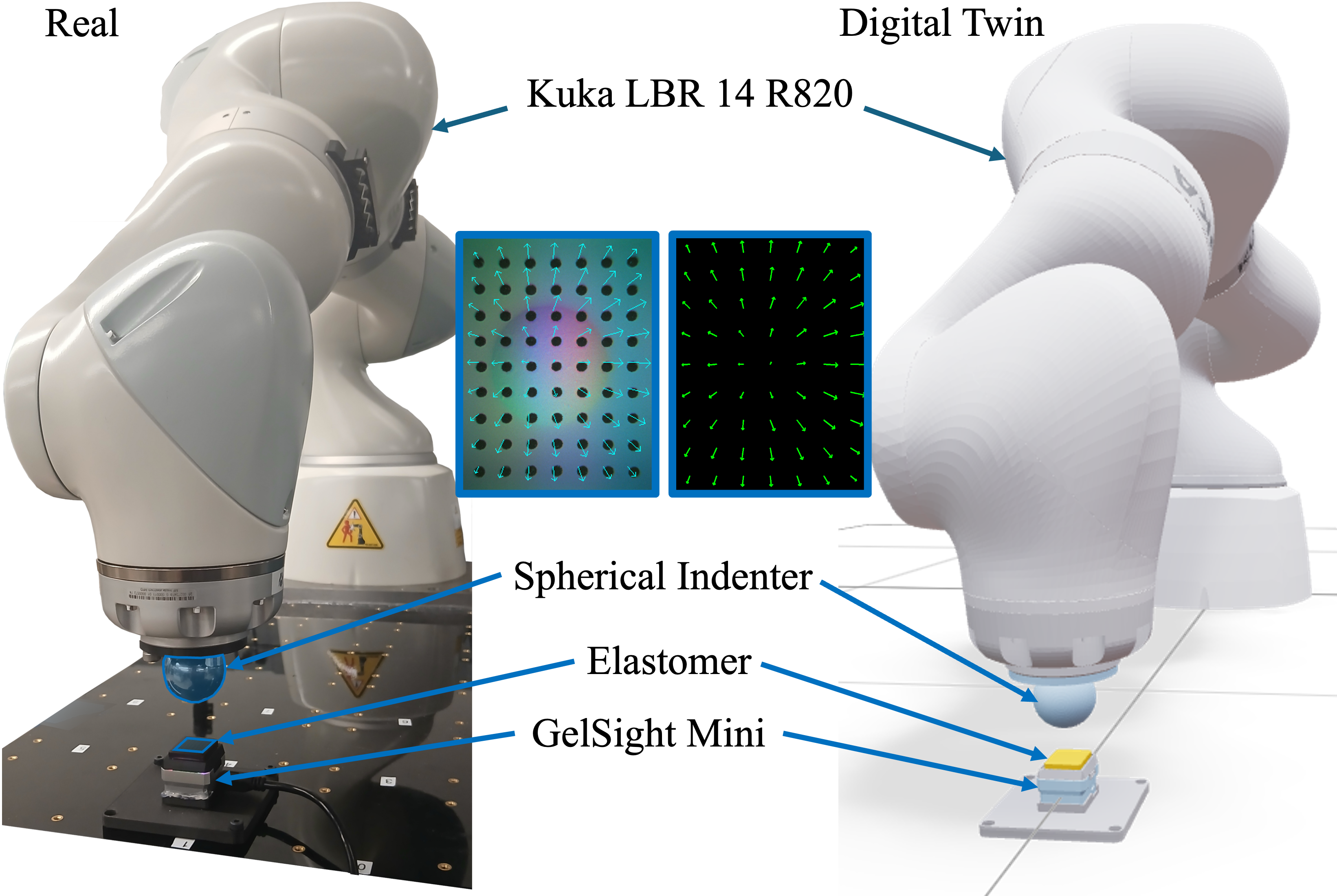
- digital twin: A virtual replica of a physical system used for simulation, calibration, and validation. "We replicate the same motion in a digital twin of the real-world setup to run baseline and our algorithms to calibrate the tactile simulation model."
- elastomer: A soft, compliant polymer layer in tactile sensors that deforms under contact. "HydroShear simulates the tactile shear feedback that arises from the physical interaction between the indenter in (a) and the sensor elastomer in (b)."
- end effector (EE): The robot’s tool at the arm’s tip (e.g., gripper) whose pose and actions are controlled. "high-dimensional inputs (EE pose, relative EE-goal pose, left and right tactile shear)"
- Finite Element Methods (FEM): Numerical techniques for simulating continuum mechanics and deformation with high accuracy but high computational cost. "While Finite Element Methods (FEM) are accurate, they are computationally too expensive for scalable Reinforcement Learning (RL) \cite{narang2020interpreting, ding2020sim, narang2020interpreting}."
- FOTS: A learning-based tactile shear simulator that models tactile shadowing for sim-to-real transfer (originally limited to in-plane motion). "A recent simulator, FOTS~\cite{fots}, uses learning based methods to model tactile shadowing and demonstrates effective sim-to-real transfer."
- GelSight Mini: A vision-based tactile sensor that captures marker displacements on a soft membrane to estimate contact geometry and shear. "In experiments with GelSight Minis, HydroShear more faithfully reproduces real tactile shear compared to existing methods."
- GPU-parallelizable: Able to run computations in parallel on GPUs for scalable simulation and training. "Our formulation is GPU-parallelizable, enabling efficient large-scale policy training in simulation."
- Heaviside function: A step function used to switch forces on/off based on contact state. "where is the heaviside function."
- hydroelastic: A contact modeling approach that combines fluid-like pressure distribution with elastic deformation for soft contacts. "Here, we present HydroShear, a non-holonomic hydroelastic tactile simulator that advances the state-of-the-art"
- hydrostatic pressure field: The pressure distribution used in fluid-based contact models, extended here to soft, elastic interaction. "extends the hydrostatic pressure field contact model~\cite{pressurefieldcontact, bubbles_hydroelastic}"
- hysteresis: History-dependent material or system response where current output depends on past inputs. "effectively capturing complex behaviors like stiction, slippage, and hysteresis."
- indenter: A contacting object that presses into a surface to create deformation and shear for measurement or simulation. "where is the signed distance function of the indenter "
- Kelvin-Voigt: A viscoelastic material model with a spring and dashpot in parallel, used to simulate compliant contact. "we use Isaac Gym TacSL's Kelvin-Voigt implementation for compliant contact."
- marker displacement field: A vector field of tracked marker motions on a tactile sensor’s membrane representing local shear and dilation. "Each sample contains the actual tactile shear field measured as a marker displacement field and the indenter trajectory that induced the shear field."
- non-holonomic: Constraints that depend on the path or velocities and cannot be integrated into positional constraints. "Here, we present HydroShear, a non-holonomic hydroelastic tactile simulator that advances the state-of-the-art"
- object-centric frame: A coordinate frame fixed to the object, used to express relative motion and contact. "represents contact through relative object motion expressed in an object-centric frame rather than an SDF-based geometric representation."
- Partially-Observable Markov Decision Process (POMDP): A formal framework for decision making with hidden state and stochastic dynamics. "We formulate our contact-rich manipulation tasks with tactile feedback as infinite-horizon discrete-time Partially-Observable Markov Decision Processes defined by the tuple "
- penalty-based approaches: Contact models that approximate forces by penalizing interpenetration and velocities. "Conversely, faster penalty-based approaches often approximate shear based merely on instantaneous penetration and velocity, failing to capture the tactile shadowing effects~\cite{nisp, oller2023tactilevad}"
- Proximal Policy Optimization (PPO): A reinforcement learning algorithm that optimizes policies with clipped objective functions. "The actor-critic is optimized with the PPO RL objective and uses encoder-LSTM-MLP networks (see Appx.~\ref{appendix:network_arch})."
- rolling shear: Shear generated by rolling contact motions with out-of-plane components. "10 samples each for dilation, translational shear, torsional shear (twist), and rolling shear"
- SE(2): The group of planar rigid motions (2D positions and rotations). "limited to tracking object motion in , neglecting full complexity required for dexterous manipulation \cite{fots}."
- SE(3): The group of 3D rigid motions (3D positions and rotations). "full object-sensor interactions."
- Signed Distance Function (SDF): A function giving the signed distance to a surface, negative inside and positive outside. "HydroShear extends hydroelastic contact models using Signed Distance Functions (SDFs) to track the displacements of the on-surface points of an indenter during physical interaction with the sensor membrane."
- sim-to-real: Transferring policies or models from simulation to real-world systems. "The sim-to-real paradigm shift that has transformed robot locomotion"
- stiction: The tendency of contacting surfaces to stick until a threshold force triggers slip. "effectively capturing complex behaviors like stiction, slippage, and hysteresis."
- stick-slip: Alternating phases of sticking and slipping during contact motion. "a) stick-slip transitions"
- tactile shadowing: Spatial attenuation or spreading of tactile signals due to deformable sensor mechanics and optics. "failing to capture the tactile shadowing effects~\cite{nisp, oller2023tactilevad}"
- taxel: An individual tactile sensor element (analogous to a pixel for touch). "Per-taxel Root Mean Squared Error (RMSE) and mean cosine similarity (CS)"
- torsional shear: Shear produced by twisting around the contact normal. "torsional shear (twist)"
- viscoelasticity: Combined viscous and elastic behavior where deformation depends on time and history. "To account for the viscoelasticity of the elastomer membrane, we recursively track the contact forces"
- watertight geometries: Closed, hole-free meshes enabling well-defined SDFs and contact computations. "from arbitrary watertight geometries while remaining agnostic to the underlying physics engine."
- zero-shot: Deployment without task-specific fine-tuning on the target domain. "This fidelity enables zero-shot sim-to-real transfer of reinforcement learning policies across four tasks"
- privileged state information: Additional state variables available in simulation (e.g., forces, poses) but not to the deployed policy. "we first train a teacher actor-critic using privileged state information."
Collections
Sign up for free to add this paper to one or more collections.