- The paper introduces zero-order robust optimization (zoRO) to enhance MPC, ensuring collision-free trajectory tracking in mobile robots.
- It incorporates ellipsoidal bounds for disturbances through recursive propagation, which boosts computational efficiency and real-time feasibility.
- Experimental results on the Bosch Rexroth platform validate that zoRO MPC achieves optimal tracking performance and robustness under noise.
Collision-free Motion Planning for Mobile Robots by Zero-order Robust Optimization-based MPC
The paper "Collision-free Motion Planning for Mobile Robots by Zero-order Robust Optimization-based MPC" explores the use of robust model predictive control (MPC) for ensuring collision-free trajectory tracking for mobile robots. The research particularly focuses on handling disturbances within robot motion using zero-order robust optimization (zoRO). To achieve collision-free motion in the presence of bounded process noise, the study applies ellipsoidal bounds to measure disturbances effectively while leveraging computational refinements through zoRO to maintain efficient operation in industrial settings.
Robust MPC with Ellipsoidal Sets
Robust MPC is employed to manage disturbances in robot systems, using ellipsoidal sets to approximate the bounds of disturbances efficiently. The implementation requires propagation of ellipsoidal tubes through recursion methods defined in the problem formulation. This approach aims at systematically incorporating ellipsoidal bounds into the control design, thereby optimizing the control command generation process.

Figure 1: Diagram of the control pipeline. The original reference trajectory $s^{\mathrm{ref$ is robustified by the zero-order robust optimization (zoRO) MPC.
Zero-order Robust Optimization (zoRO)
ZoRO optimizes MPC problems by fixing backoff terms, thus reducing computational demands. This method eliminates some complexities introduced by robust MPC frameworks, particularly those associated with increased computational overhead due to the quadratic nature of ellipsoidal representation. In practice, zoRO facilitates real-time application of robust MPC in mobile robot control, demonstrating computational efficiency.
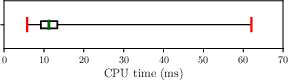
Figure 2: CPU time of solving one zoRO MPC problem.
Optimality in the Absence of Obstacles
The paper provides theoretical proofs and numerical validation showing that the zoRO MPC maintains optimal performance in scenarios devoid of collision constraints. Particularly, it converges to the reference trajectory optimally when disturbance constraints are inactive near obstacles. This rigor confirms the efficacy of zoRO in real-world applications where precise trajectory tracking and collision avoidance are critical.
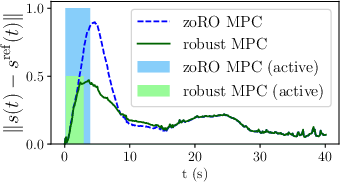
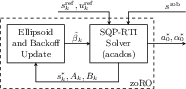

Figure 3: Tracking errors of the robust MPC and those of zoRO.
Real-world Implementation
Experimental results on the Bosch Rexroth ActiveShuttle platform demonstrate zoRO's capabilities in practical environments. The mobile robot efficiently tracks reference trajectories in the presence of simulated obstacles, illustrating both robustness and computational efficiency. The boxplots and trajectory graphics validate the practical application of zoRO MPC under process noise conditions encountered in industrial settings.
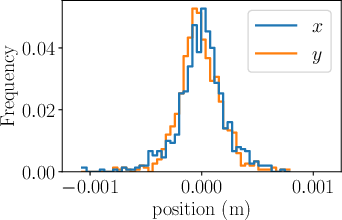
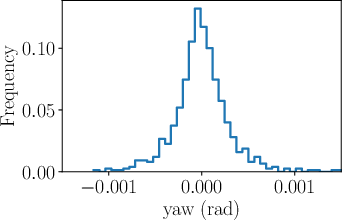
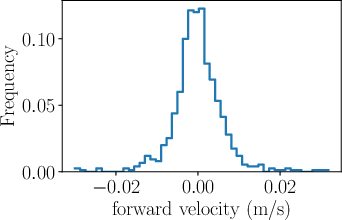
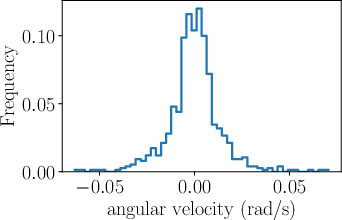
Figure 4: The process noise measured with the motion capture system.
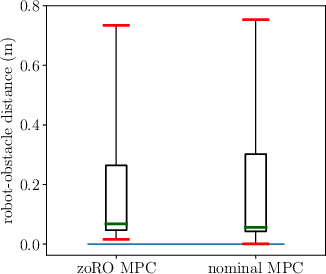
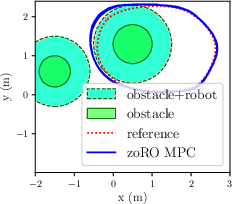
Figure 5: Distances between robot and obstacles while some collision avoidance constraints are active.
Conclusion
The paper provides a comprehensive approach to robust collision avoidance and trajectory tracking in mobile robots through zero-order robust optimization-based MPC. The implementation successfully addresses the demands for real-time computation and robust handling of disturbances, with experimental validation reinforcing its practical applicability. Future work may consider extending these methodologies to dynamic environments with moving obstacles.
By demonstrating these advancements, the study contributes significantly to mobile robotic control, ensuring safe and efficient operation in complex environments.

