- The paper introduces an MPC-based trajectory planner that utilizes VAR models to predict dynamic obstacle positions and avoid collisions.
- It employs probabilistic constraints based on Mahalanobis distance to construct safe trajectory regions while meeting kinodynamic limits.
- Simulation results in Gazebo demonstrate effective collision avoidance and acceptable real-time performance under dynamic conditions.
Trajectory Planning with Model Predictive Control (MPC) for Obstacle Avoidance Considering Prediction Uncertainty
Introduction
The paper presents a trajectory planner aimed at enhancing autonomous robot navigation through dynamic obstacle avoidance, integrated within the Robot Operating System 2 (ROS2) framework. Unlike conventional Nav2 trajectory planners which cater predominantly to static obstacles, this planner utilizes Model Predictive Control (MPC) to predict future positions of dynamic obstacles, employing a stochastic Vector Auto-Regressive Model (VAR). By representing obstacle positions as probability distributions and incorporating constraints based on the Mahalanobis distance, the planner ensures robots navigate regions with minimal likelihood of collision while adhering to kinodynamic constraints.
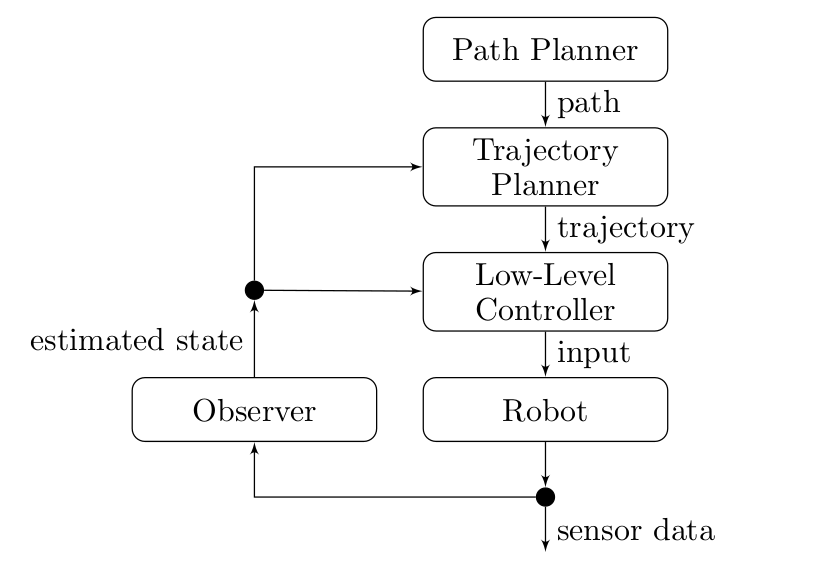
Figure 1: Overview: Control Structure
Methodology
Model Predictive Control Framework
The MPC framework is structured around a discrete-time dynamical model for robots, focusing on trajectory optimization over a prediction horizon. The paper defines the MPC problem as a non-convex optimization challenge, accommodating state and input constraints while emphasizing dynamic obstacle avoidance within the robot's workspace. Dynamic obstacles are characterized by probability distributions, and collision avoidance is managed through set construction that includes both static and dynamic obstacle sets.
Set Construction
Dynamic obstacles are modeled with position distributions N(μ,Σ), where Mahalanobis distance determines probabilistic constraints for collision avoidance. The ellipse constructed from these constraints represents the feasible regions, augmented by robot and obstacle radii to ensure safety margins. This approach leverages coordinate transformations and eigen-decomposition to scale and orient ellipses efficiently within the prediction horizon.
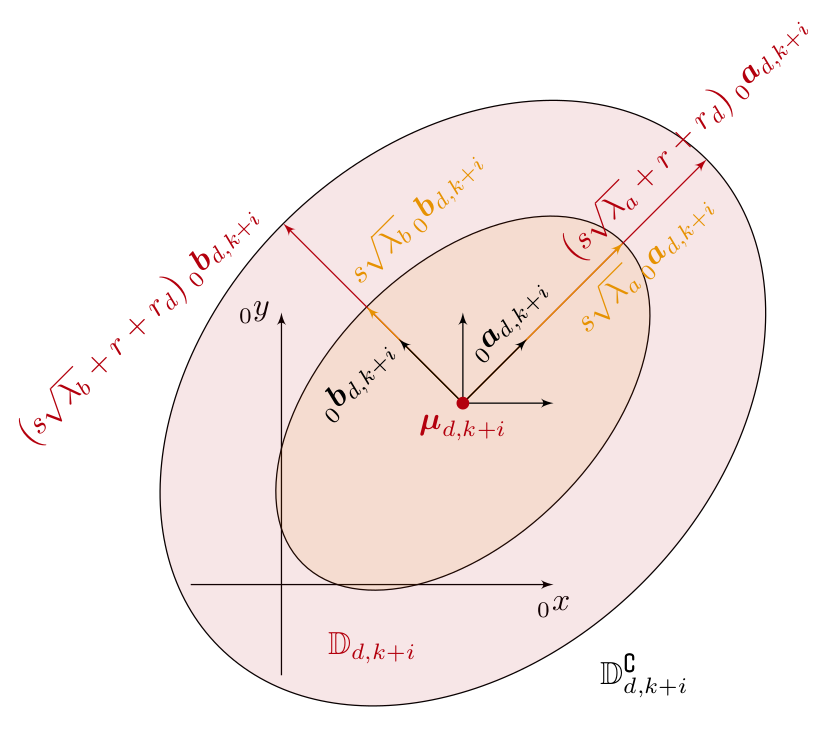
Figure 2: Visual Representation of Ellipse Construction

Figure 3: Comparison of different forecast regions for p=0.90
Implementation
The trajectory planner is implemented in a Gazebo simulation environment, leveraging ROS2 and Nav2. Two skid-steered robots, equipped with sensors, are simulated with a path planner using Dijkstra's algorithm, and dynamic obstacle positions are communicated between robots. Position predictions employ a VAR(2) process, translating velocity forecasts to positions using statistical models. The system's control structure incorporates an Extended Kalman Filter and velocity smoothing mechanisms, ensuring compatibility with the Nav2 framework and maintaining real-time operation constraints.

Figure 4: Approximation Error in Ellipse Construction
Results
Simulation scenarios demonstrate the trajectory planner's ability to efficiently navigate and avoid collisions in dynamically changing environments. The visualization captures how robots adapt their paths to account for predicted positions of obstacles, highlighting the planner's predictive capabilities and responsiveness to dynamic challenges. Computational performance metrics indicate acceptable CPU time for solver operations, albeit with occasional spikes due to non-convex problem conditions.
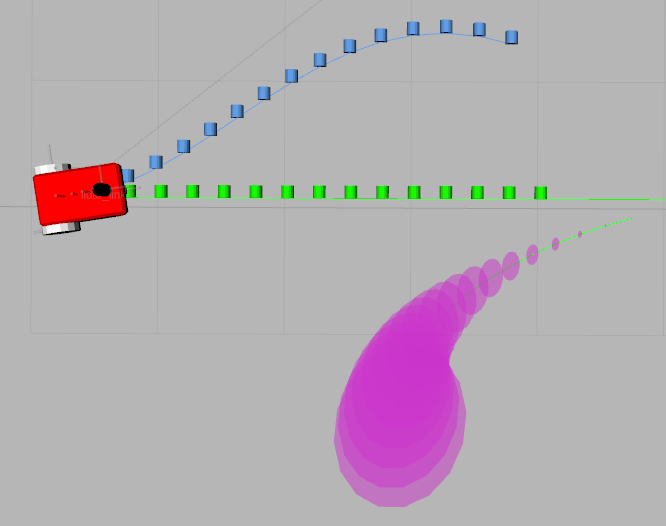
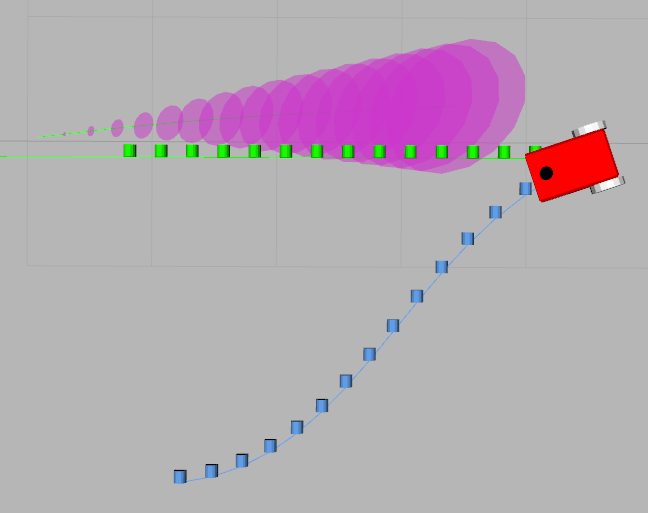
Figure 5: Two robots in a Chicken Game
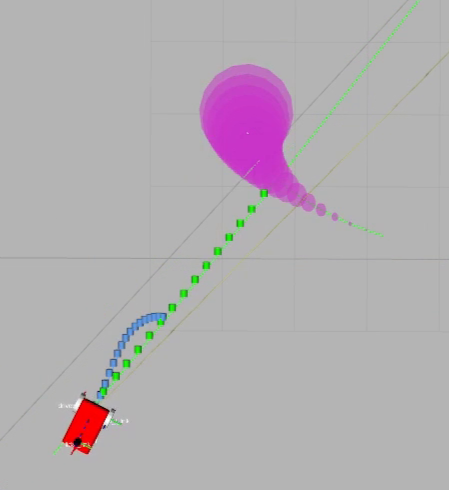
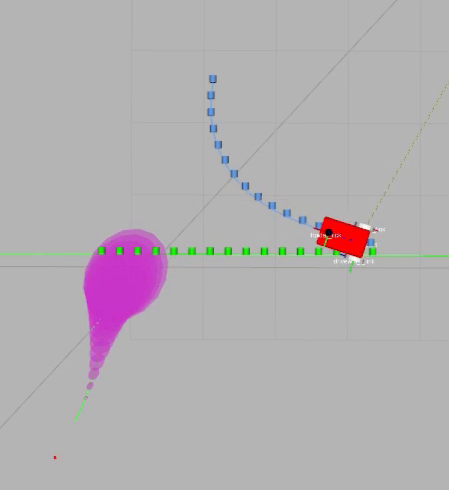
Figure 6: Collision Avoidance
Conclusion and Future Work
The trajectory planner extends Nav2's capabilities by effectively handling dynamic obstacles through prediction-based strategies, improving collision avoidance and adaptability. While current implementations focus on dynamic scenarios, future work will address static obstacle integration and real-world experimentation, further refining the approach. The potential incorporation of dynamic game theory and enhanced obstacle detection and tracking interfaces remain prospective avenues for research, promising robust solutions for autonomous navigation in complex environments.