- The paper introduces a hybrid MPPI-IPDDP method that fuses sampling-based exploration with gradient-based trajectory smoothing to achieve collision-free paths.
- The approach employs MPPI for generating initial trajectories and defining convex corridors, followed by IPDDP for refining control inputs to ensure smoothness.
- Case studies on wheeled robots and quadrotors demonstrate the method's real-time applicability and robust performance in complex, dynamic environments.
MPPI-IPDDP: Hybrid Trajectory Generation for Autonomous Robots
Introduction
The paper "MPPI-IPDDP: Hybrid Method of Collision-Free Smooth Trajectory Generation for Autonomous Robots" introduces a hybrid approach to generate smooth, collision-free trajectories for autonomous robots. The method combines sampling-based Model Predictive Path Integral (MPPI) control and gradient-based Interior Point Differential Dynamic Programming (IPDDP) to leverage their respective strengths: MPPI for exploration and avoidance of local optima, and IPDDP for producing smooth paths. This study focuses on the application of this method to differential-driving wheeled mobile robots and point-mass quadrotors.
Methodology
The proposed approach—termed MPPI-IPDDP—integrates the following three key steps:
- Coarse Trajectory Generation: MPPI is employed to construct an initial trajectory through a multi-step sampling and re-weighting process using variational inference. The goal is to approximate the control policy that minimizes a given cost function while ensuring collision avoidance. This mechanism allows for efficient exploration of the state space, effectively bypassing obstacles.
- Convex Path Corridor Construction: Subsequent to the coarse trajectory, a series of collision-free convex corridors guide the robot. The path corridors are defined using centers and radii, determined by optimizing the balance between adherence to the nominal MPPI path and maximal inflation to ensure robustness against disturbances.
- Trajectory Smoothing Using IPDDP: The initial coarse path is refined through IPDDP, which ensures constraint satisfaction and trajectory smoothness by optimizing control inputs along the corridors identified in the earlier step. The backward and forward passes of the IPDDP adjust the control inputs, leveraging Bellman's principle and employing slack variables to mitigate any potential violation of path constraints.
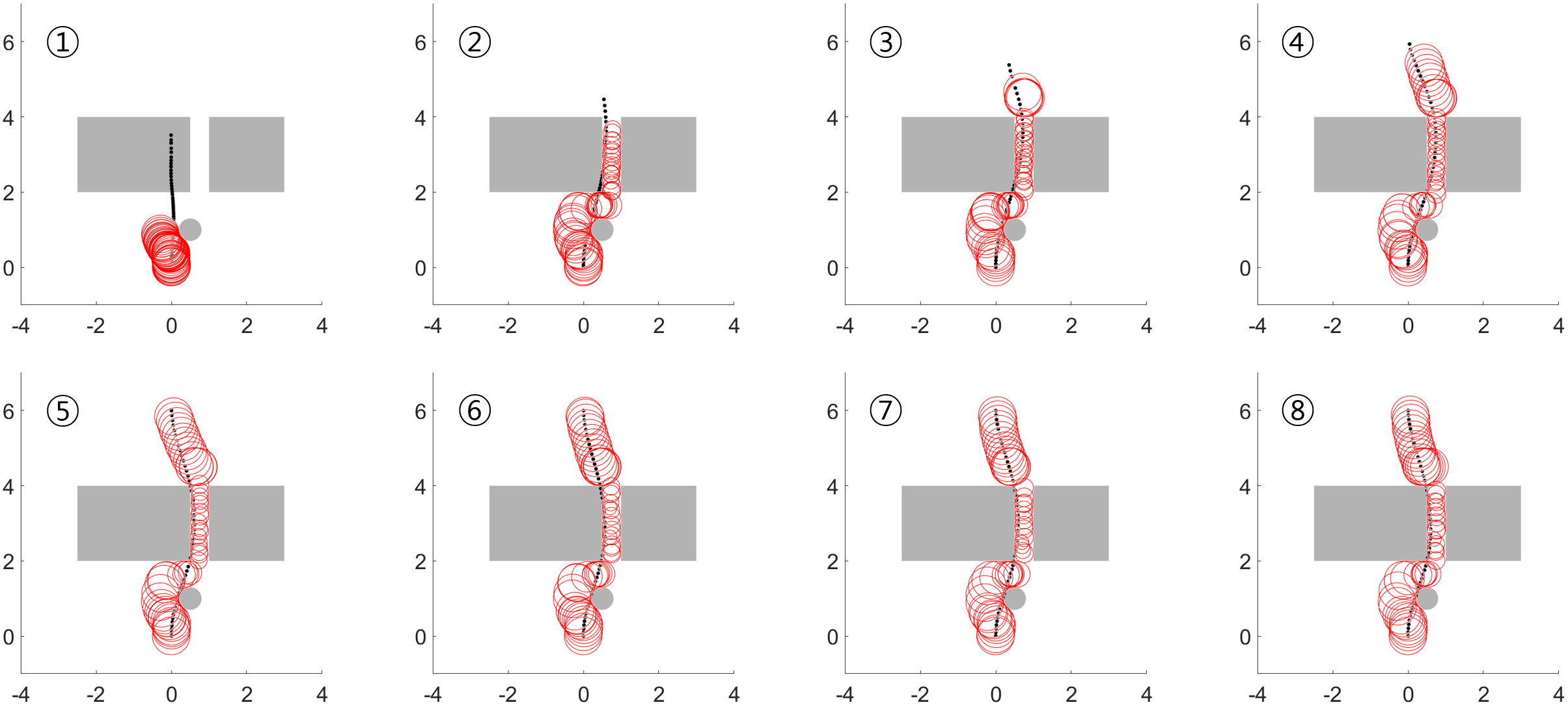
Figure 1: Iterations of {\tt MPPI-IPDDP.}
Implementation
MPPI-IPDDP implementation involves iterative refinement of trajectory paths using both MPPI for initial coarse paths and IPDDP for subsequent smooth refinements.
- MPPI utilizes a stochastic optimization framework, allowing it to operate without the requirement for differentiable constraint functions, effectively managing arbitrary obstacle shapes. Weights are assigned to sampled trajectories based on their computed costs and combined to form a new trajectory.
- IPDDP applies sequential quadratic programming within the corridors, handling constraints derived from the convex path construction stage. By iteratively solving the recursive Bellman equation, as structured within the control environment, IPDDP guarantees convergence toward an optimal control solution under given system dynamics.
The algorithms require considerations of computational resources, especially for real-time applications where rapid adjustments to dynamic environments are paramount. The implementation must balance the number of iterations with the available computational budget to ensure timely results.
Case Studies
Wheeled Mobile Robot
For differential-driving wheeled robots, the algorithm effectively navigates a 2D environment with obstacles.
- The robot used differential constraints to maintain feasible motion.
- As the iterative processes continue, the path through which the robot can traverse becomes increasingly feasible and smooth, as illustrated by the controlled trajectories and minimal collisions.
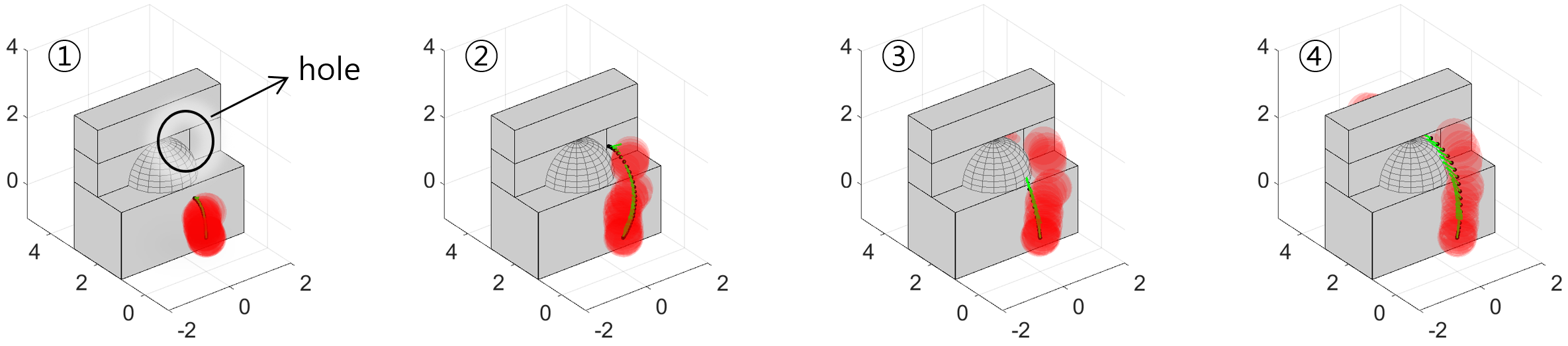
Figure 2: Iterations for generating path from (0,0,0) to (0,4,2) by {\tt MPPI-IPDDP}.
Quadrotor
In the 3D case study involving a quadrotor, MPPI-IPDDP efficiently dealt with the complexities inherent to aerial motion planning fully demonstrated by the smooth path that successfully navigated through tight spaces.
- The implementation was able to produce a final trajectory adhering to specified entry and exit criteria, showing capabilities of circumnavigating constraints associated with physical geography.
Conclusion
MPPI-IPDDP provides a comprehensive method for robust, smooth, and collision-free navigation of autonomous robots under complex constraints, leveraging the respective advantages of MPPI and IPDDP methodologies. The successful demonstration on both ground and aerial robots in this study indicates potential real-world applications, especially considering the method's scalability and environmental adaptability. Future directions may include the integration of global path planners to further enhance navigational efficiency and extend applicability into uncertain scenarios often encountered in real-world problems.

