- The paper proposes a novel method integrating point cloud-based Control Barrier Functions with MPC for adaptive, collision-free navigation.
- It introduces a YOLO-Fusion detector and a Forward-Time-Domain map to dynamically identify and predict both static and dynamic obstacles.
- Experimental validations demonstrate enhanced obstacle clearance, efficiency, and optimized path planning in both real-world and simulated tests.
Point Cloud-Based Control Barrier Functions for Model Predictive Control in Safety-Critical Navigation of Autonomous Mobile Robots
Introduction
The integration of Point Cloud-Based Control Barrier Functions (PCCBFs) with Model Predictive Control (MPC) is proposed to enhance safety-critical navigation for autonomous mobile robots operating in complex environments. Traditional approaches often model obstacles as ellipsoids, which can lead to overly conservative motion planning, particularly in dynamic settings with unpredictable obstacles like pedestrians. This work addresses these challenges by leveraging point cloud data to dynamically redefine safety constraints using Control Barrier Functions (CBFs), integrated within an MPC framework, enabling efficient and reliable path planning.
Framework and Algorithm Design
The innovative PCCBF framework is elucidated, wherein point cloud data is dynamically processed for obstacle characterization, differentiating between static and dynamic components. The algorithmic pipeline includes:
- Dynamic Obstacle Detection: Integrates RGB-D cameras and Kalman filtering to segment and predict trajectories of dynamic obstacles. The YOLO-Fusion detector is introduced for precise 3D localization by fusing image and point cloud data, addressing traditional misdetection issues (Figure 1).
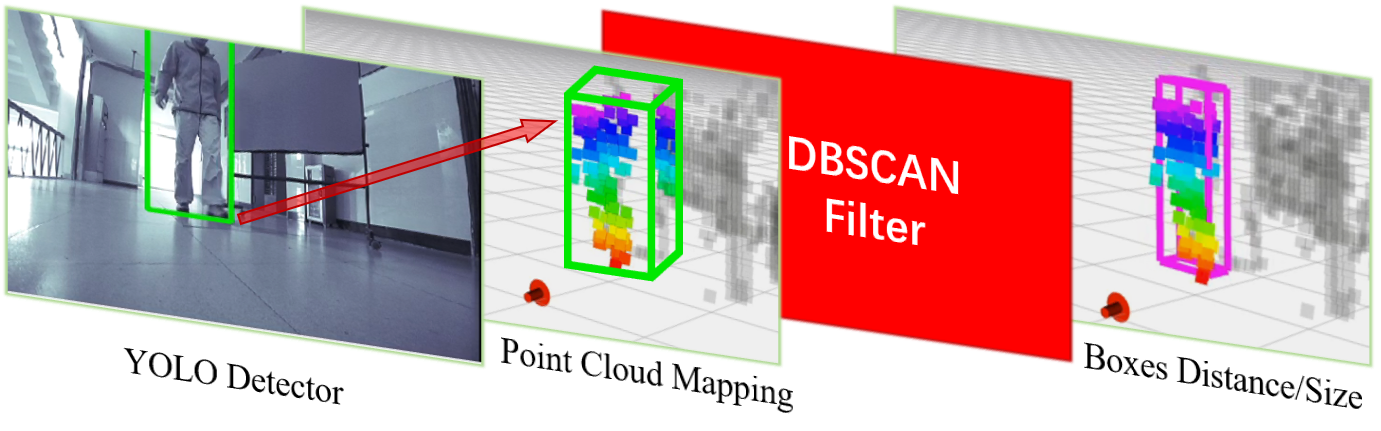
Figure 1: Illustration of the YOLO-Fusion detector.
- Local Map Construction: The Forward-Time-Domain (FTD) map is created by combining predicted trajectories of dynamic obstacles with static environments. This probabilistic map aids in identifying high-risk collision points for future time steps (Figure 2).
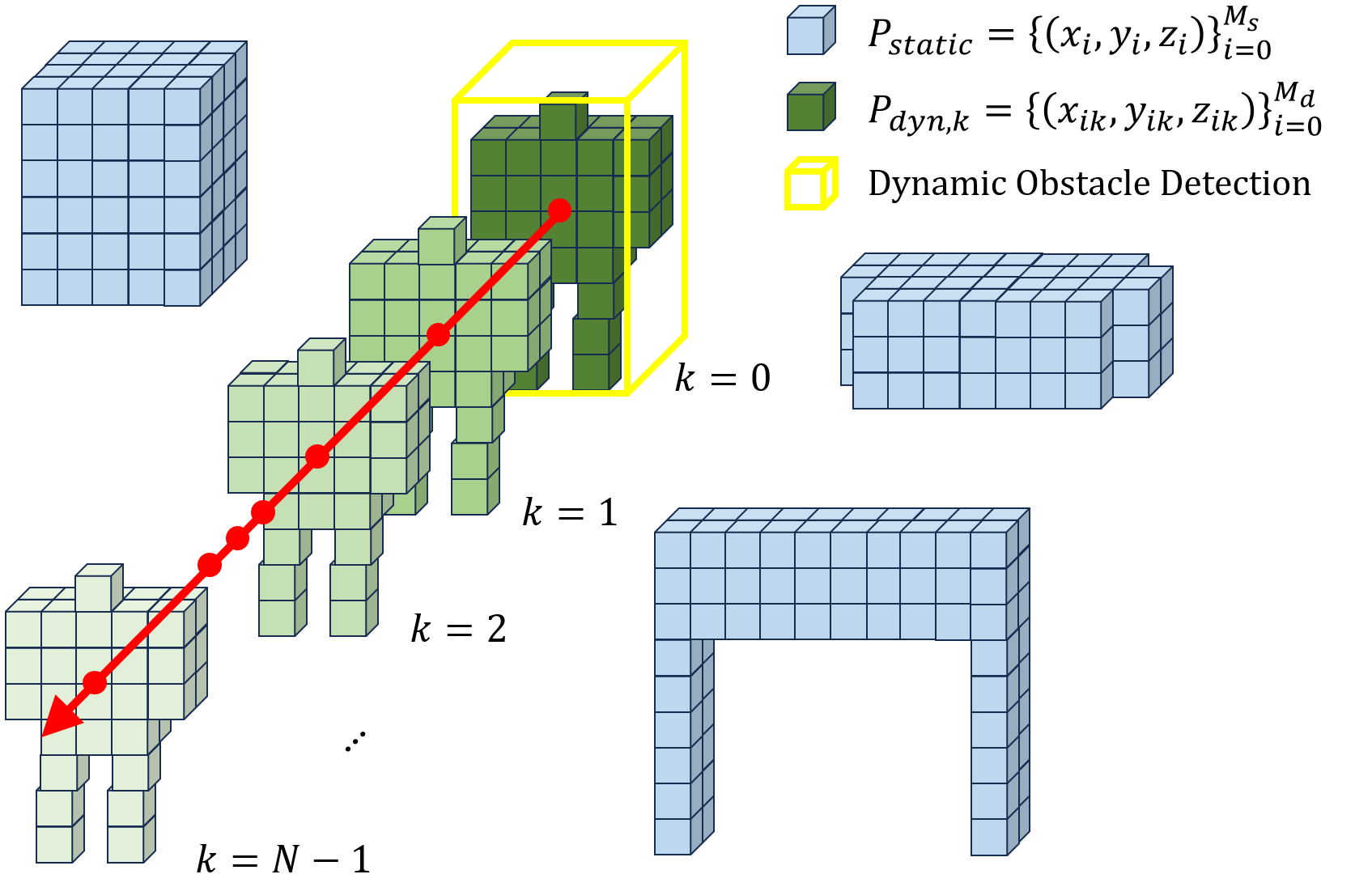
Figure 2: FTD map structure.
- Control Barrier Function Synthesis: Risk points are identified in the FTD map for developing CBF constraints, ensuring that both current and forecasted obstacle interactions are safely circumnavigated (Figure 3).

Figure 3: The proposed collision avoidance framework.
- MPC-Based Trajectory Planning: By integrating these synthesized CBFs within an MPC framework, the proposed algorithm facilitates the generation of optimal, collision-free trajectories through iterative constraint optimization (Figure 4 and Figure 5).
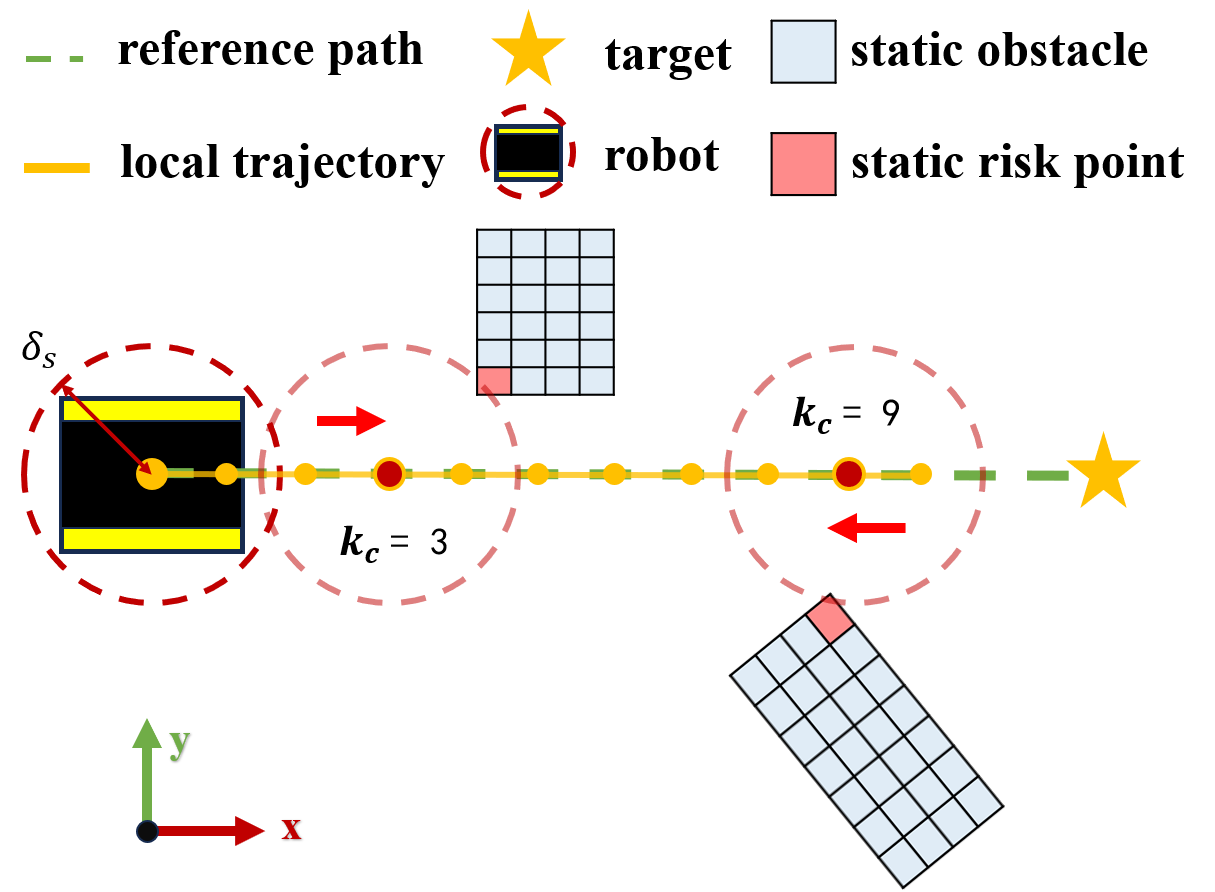
Figure 4: Static risk point identification methodology.
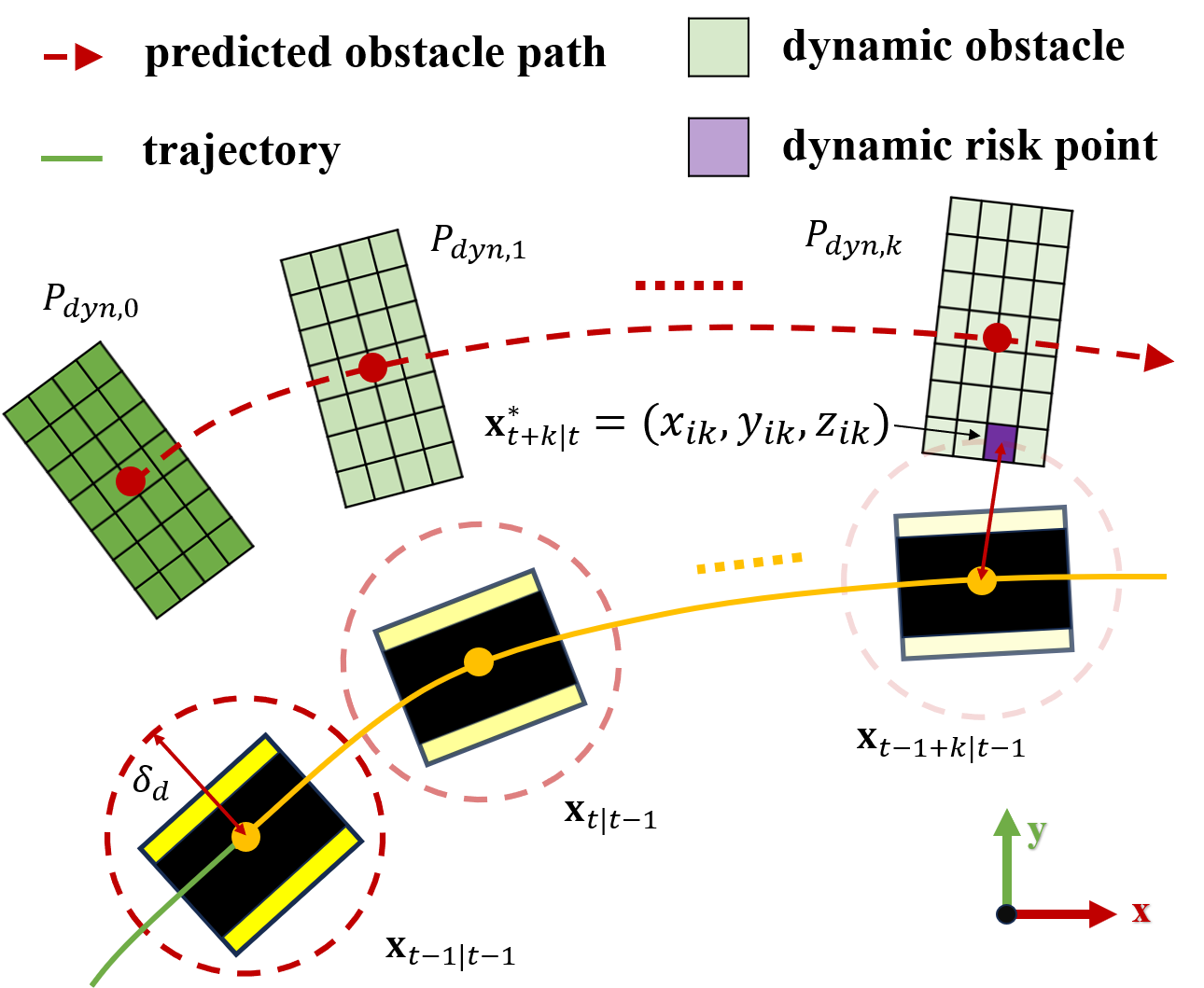
Figure 5: Dynamic risk point identification methodology.
Experimental Validation
The PCCBF-MPC algorithm's performance was empirically validated in both real-world and simulated environments, focusing on scenarios comprising static (e.g., furniture) and dynamic obstacles (e.g., moving pedestrians).
Real-World Implementation
In practical tests (Figure 6), utilizing the TurtleBot4 platform, the system demonstrated superior navigation and obstacle avoidance even in densely cluttered environments. The innovative use of hollow spaces, particularly when interacting with large static structures like hollow blackboards, showcases the system's advanced navigation strategy.
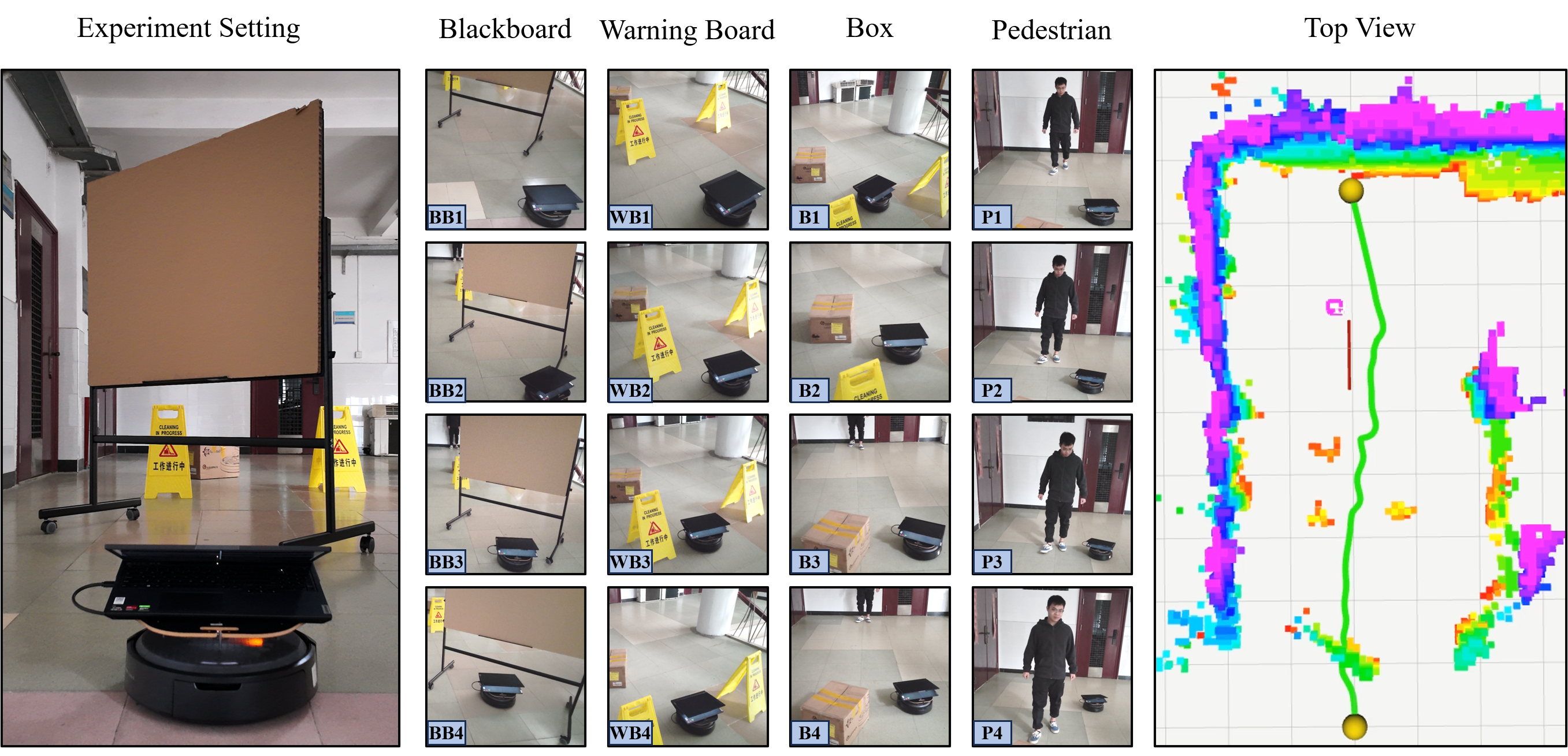
Figure 6: Real-world experimental results show adaptability in navigating complex environments.
Simulated Testing
Simulations with the Jackal robot within Gazebo presented challenges from both static and moving entities, achieving high success rates by dynamically updating risk assessments and CBF constraints. Comparative analysis against DCBF-NMPC and Depth-CBF-QP frameworks (Figure 7) indicated significant improvements in terms of minimal obstacle distance, path efficiency, work completion time, and overall success rates.
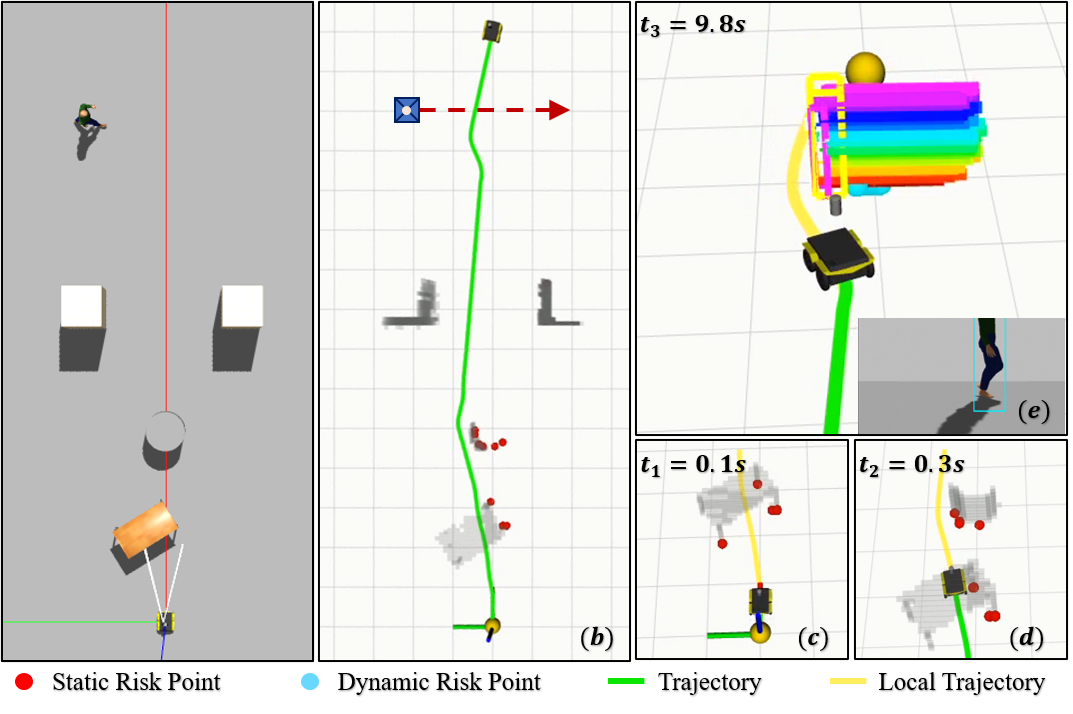
Figure 7: Simulation results illustrating effective navigation in complex simulated environments.
Conclusion
This study establishes the efficacy of integrating point cloud-based CBFs with NMPC for autonomous mobile robots navigating in safety-critical applications. The proposed framework's adaptability to dynamic conditions enables reduced conservatism in path optimization, while ensuring compliance with safety constraints. Future research may explore extending this approach to aerial robotics or enhancing computational efficiency for real-time application in dense urban environments. Future investigations may explore leveraging more sophisticated machine learning models to continuously refine the dynamic obstacle detection and risk assessment processes.

