Energy-Based Joint-Embedding Predictive Architectures Made Accessible
This presentation introduces EB-JEPA, a lightweight open-source library that democratizes experimentation with Joint-Embedding Predictive Architectures. The talk walks through a unified energy-based framework spanning self-supervised image learning, video prediction, and action-conditioned world modeling—all trainable on a single GPU. We examine empirical findings on regularization strategies, temporal dynamics, and goal-conditioned planning, highlighting how careful design choices enable sophisticated prediction and planning without massive computational resources.Script
What if you could experiment with state-of-the-art predictive architectures on a single graphics card in just a few hours? The authors introduce EB-JEPA, a lightweight library that makes energy-based joint-embedding methods accessible for research and education.
Let's start by understanding what makes this approach fundamentally different.
Building on that foundation, the Joint-Embedding Predictive Architecture philosophy centers on a key insight: predict in latent space where semantic abstractions live, not in the high-dimensional pixel space cluttered with irrelevant details. This energy-based formulation elegantly unifies three escalating scenarios.
The library implements three progressively sophisticated modalities within a shared architectural backbone. Each use case is engineered to run on limited hardware, dramatically lowering the barrier for students and researchers to explore modern predictive learning.
Now let's examine the technical mechanisms that make this work.
Preventing representational collapse is critical, and the authors compare two strategies in detail. While both VICReg and SIGReg reach comparable peak performance, the ablations reveal that SIGReg offers substantially greater hyperparameter stability, making it more practical for exploration.
This sensitivity analysis makes the trade-offs concrete. Each line represents a different configuration, and you can see how SIGReg maintains consistent accuracy across a wide hyperparameter range, while VICReg exhibits much sharper performance drops with suboptimal settings, requiring more careful tuning to achieve its best results.
Drilling deeper into the ablations, the authors identify several architectural and training choices that substantially impact performance. The multistep rollout finding is particularly important: training with recursive prediction aligns the model's learning signal with how it will actually be evaluated autoregressively.
Let's look at what these methods actually achieve in practice.
In the video domain, this visualization demonstrates the model's ability to maintain temporal coherence across long horizons. Starting from a short input sequence on the left, the model produces 1-step predictions in the middle panel, then sustains a full autoregressive rollout on the right—correctly inferring both the direction and speed of moving digits without collapse or drift.
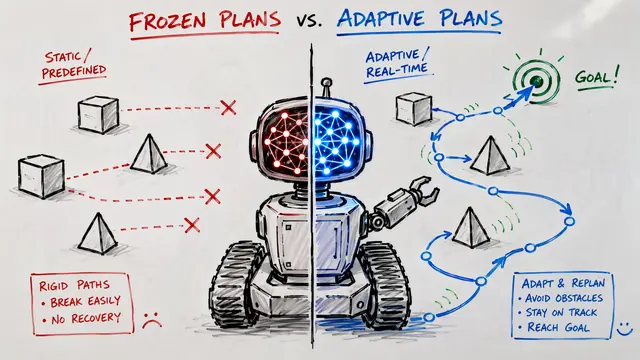
When extended to action-conditioned world models, the method enables robust goal-directed planning. The 97% success rate on randomized navigation tasks confirms practical viability, while the ablation showing catastrophic failure without inverse dynamics underscores how each regularization component plays a structural role in the learning objective.
EB-JEPA proves that sophisticated predictive architectures and world models don't require massive compute—they require careful design. To explore the code, run experiments yourself, or dive deeper into energy-based learning, visit EmergentMind.com.