LeRobot: An Open-Source Library for End-to-End Robot Learning
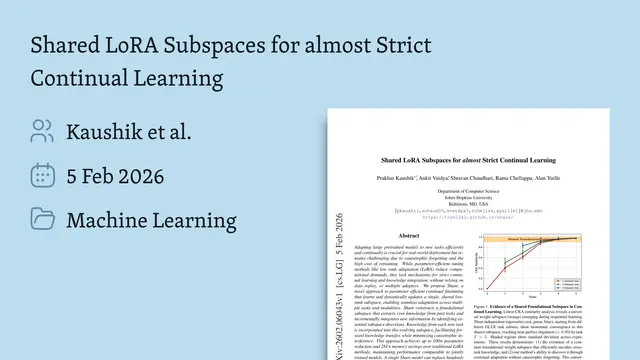
This presentation explores LeRobot, an open-source library that addresses fragmentation in robot learning by vertically integrating the entire robotics stack. We examine how LeRobot unifies disparate tools through standardized middleware, scalable multimodal datasets, optimized inference architectures, and reproducible implementations of state-of-the-art algorithms. The talk highlights the paradigm shift from explicit modular pipelines to implicit data-driven policies, the democratization of robot learning through low-cost hardware and community-contributed datasets, and the practical implications for reproducibility, scalability, and accessibility in robotics research.Script
Robotics research has hit a wall that software can tear down. Thousands of researchers waste time reimplementing motor controllers, wrestling with incompatible data formats, and debugging inference pipelines instead of advancing the science. LeRobot offers a unified solution across the entire stack.
Before LeRobot, every research group built their own interfaces to hardware, created custom data formats, and reimplemented algorithms from scratch. This fragmentation didn't just slow progress—it made results impossible to replicate and knowledge impossible to transfer between labs.
To understand why unification matters now, we need to see how robot learning itself has fundamentally changed.
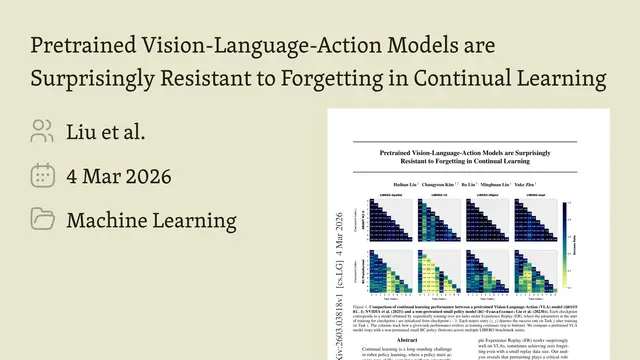
Classical robotics built explicit models—every contact force calculated, every trajectory planned analytically. Robot learning replaces this with implicit models: neural networks that discover structure directly from interaction data. This shift mirrors what happened in computer vision a decade ago, and it scales far better with data and compute.
Low-cost hardware has shattered the data collection bottleneck. A graduate student can now 3D-print and assemble a capable manipulator for the cost of a single GPU. The result: community-contributed datasets now dwarf centralized benchmarks, creating a cambrian explosion of robot learning data.
LeRobot responds to this explosion by providing the infrastructure to harness it.
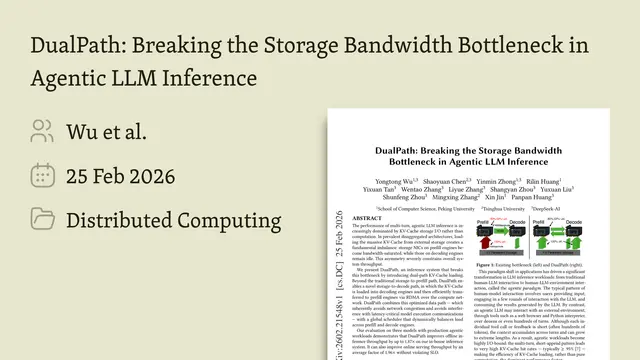
The library's architecture spans three layers. At the bottom, unified middleware makes a humanoid platform and a tabletop arm speak the same language. In the middle, the LeRobotDataset format turns heterogeneous sensor streams into a common representation. At the top, an asynchronous inference stack lets you run a 7 billion parameter vision-language model on a remote server while your robot executes actions at 50 hertz.
The impact shows in adoption metrics. The most downloaded datasets aren't coming from large institutions with proprietary infrastructure—they're open benchmarks from the research community. Academic collaborations like OpenX-Embodiment and DROID lead in usage precisely because they adopted the standardized format, making their data immediately usable across hundreds of projects without conversion scripts or preprocessing pipelines.
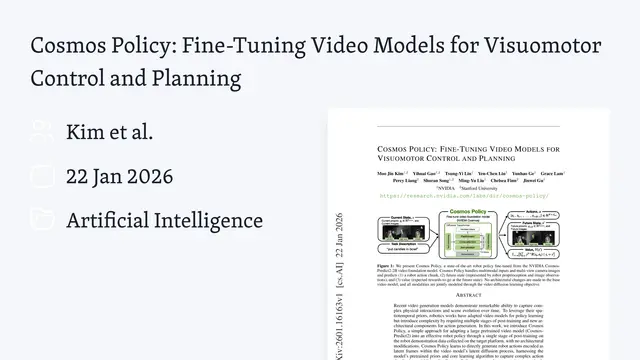
The model library reflects the field's current frontier. ACT dominates community uploads because you can train it overnight and deploy it on modest hardware. Diffusion policies capture richer action distributions but demand GPU inference. Vision-language-action models like SmolVLA enable instruction following and zero-shot transfer, but their billions of parameters push you toward networked deployment architectures.
LeRobot doesn't just organize existing tools—it establishes a shared substrate that lets thousands of researchers build on each other's work instead of past each other. The fragmentation that once defined robot learning is giving way to a unified, accelerating ecosystem. Visit EmergentMind.com to explore more research and create your own video presentations.