Zero-Shot Sim-to-Real Transfer
This lightning talk explores how robots and autonomous systems can be trained entirely in simulation and deployed directly to the real world without any fine-tuning. We'll examine the core challenge—bridging the reality gap—and discover the methodologies that make zero-shot transfer possible, from domain randomization to adversarial training. Through concrete examples spanning manipulation, aerial robotics, and soft robotics, we'll see how this paradigm is transforming the development of intelligent physical systems.Script
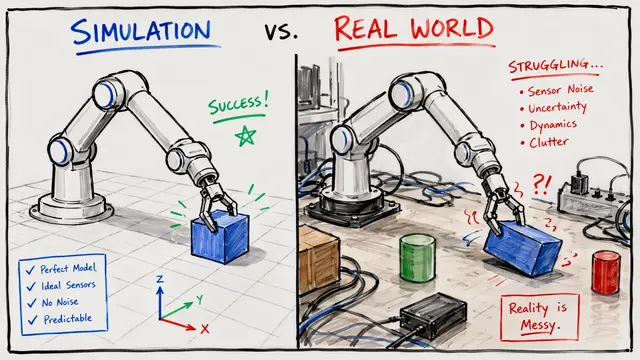
Imagine training a robot in a completely virtual world, then watching it perform flawlessly in reality on its very first try. This is the promise of zero-shot sim-to-real transfer, where policies learned entirely in simulation bridge the gap to physical hardware without any real-world adaptation.
But first, we need to understand the fundamental obstacle that makes this so difficult.
The reality gap emerges from three core sources of discrepancy. Simulated sensors can't capture the full complexity of real-world perception, physical dynamics contain subtle nonlinearities that resist faithful modeling, and real sensors provide feedback that's fundamentally different from their simulated counterparts.
So how do researchers overcome these obstacles?
Two families of techniques have emerged as particularly effective. Randomization approaches create robustness by training on diverse simulated conditions, with surprisingly simple methods often matching complex ones. Architectural solutions tackle the gap more directly through adversarial perturbations, high-fidelity perception, and decomposed control structures that localize modeling errors.
Beyond randomization, the choice of representation matters enormously. Keypoint-based visual encodings and tactile features create abstractions that naturally generalize across the sim-to-real boundary, achieving remarkable precision in real deployment.
Let's examine how these methods perform when deployed on actual hardware.
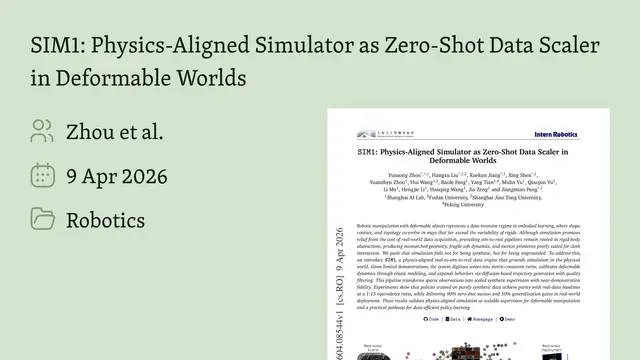
The empirical results are striking. From autonomous vehicle coordination achieving measurable efficiency gains, to drones racing through gates with near-perfect accuracy, to deformable robots exceeding human expert performance, zero-shot transfer is proving viable across radically different problem domains.
Systematic comparisons reveal counterintuitive insights. Engineering complexity doesn't always correlate with transfer quality, simpler randomization can rival elaborate schemes, and minimalist observation spaces often outperform information-rich alternatives when properly designed.
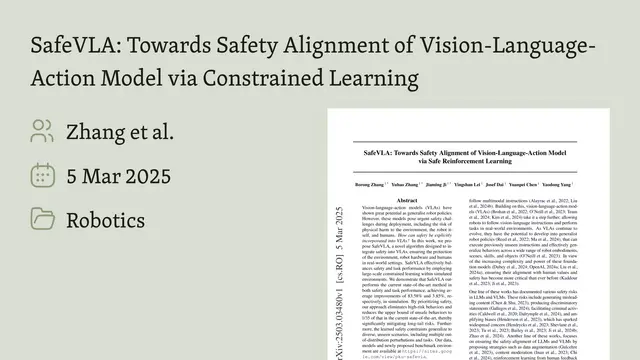
Despite remarkable progress, fundamental challenges remain. As system complexity grows, the limits of simulation become more apparent, and ensuring safety during deployment of aggressive behaviors continues to demand careful attention.
Zero-shot sim-to-real transfer is fundamentally changing how we develop intelligent physical systems, making robust real-world deployment accessible without costly data collection or hardware risk. To dive deeper into the methodologies and latest research behind this transformative approach, visit EmergentMind.com.