ORCA: A Platform for Open-Source Dexterity Research
Abstract: Robotics manipulation research increasingly focuses on two-finger parallel grippers for their effectiveness, affordability, and ease of teleoperation. Grippers are nonetheless limited by their form factor, often requiring bimanual setups even for simple reorientation tasks. Anthropomorphic hands are a more natural platform for dexterous robot learning -- closer to the human hand, and capable of learning from human video -- yet they remain hard to use in learning research: even where open and accessible hand hardware exists, the software for control, simulation, teleoperation, and retargeting is scattered in one-off code bases, and largely disconnected from the robot-learning ecosystem. In this work, we introduce the \orca~learning stack, an open-source research stack for dexterity as a first-class robot learning domain. Our \orca~stack unifies low-level control, simulation, teleoperation from a range of consumer platforms, and hand retargeting, behind a single interface, and integrates natively with popular robot-learning frameworks such as \lerobot, so dexterous hand researchers can leverage the same data, training, and evaluation pipelines used for non-dexterous robot learning. We demonstrate a complete end-to-end workflow, collecting expert demonstrations of an in-hand reorientation task by teleoperation with a consumer-grade VR headset, training an autonomous policy with \lerobot, and evaluating the learned policy in a fully reproducible and observable setup. We open-source the entire stack as a shared, reproducible foundation for dexterous-manipulation research.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview: What is this paper about?
This paper introduces orca, a complete, open-source “toolbox” that makes it much easier to do research with robot hands that work like human hands. Instead of using simple two-finger grippers (like tongs), orca focuses on multi-fingered, human-like hands that can do more delicate, flexible moves. The authors provide both:
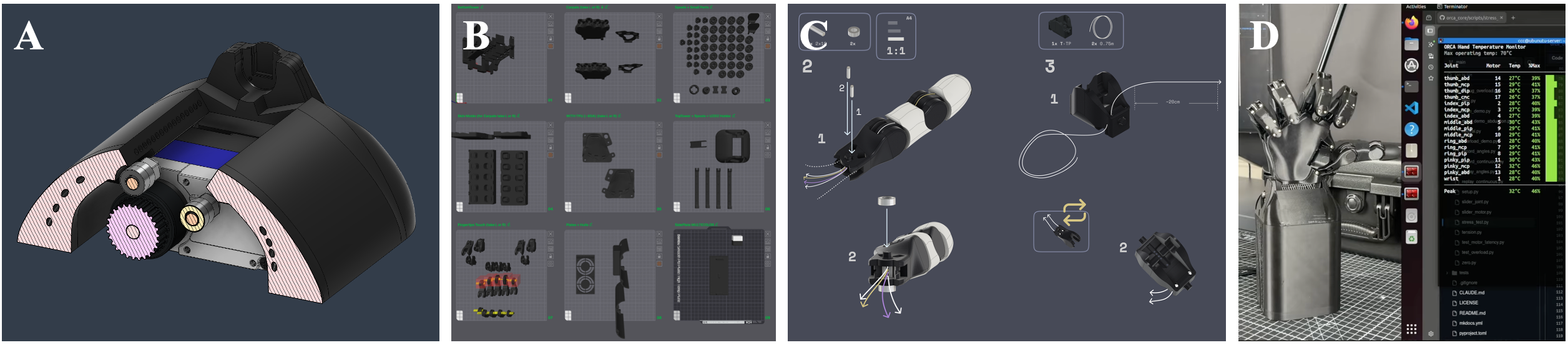
- An affordable, 3D‑printable robot hand called Orcahand.
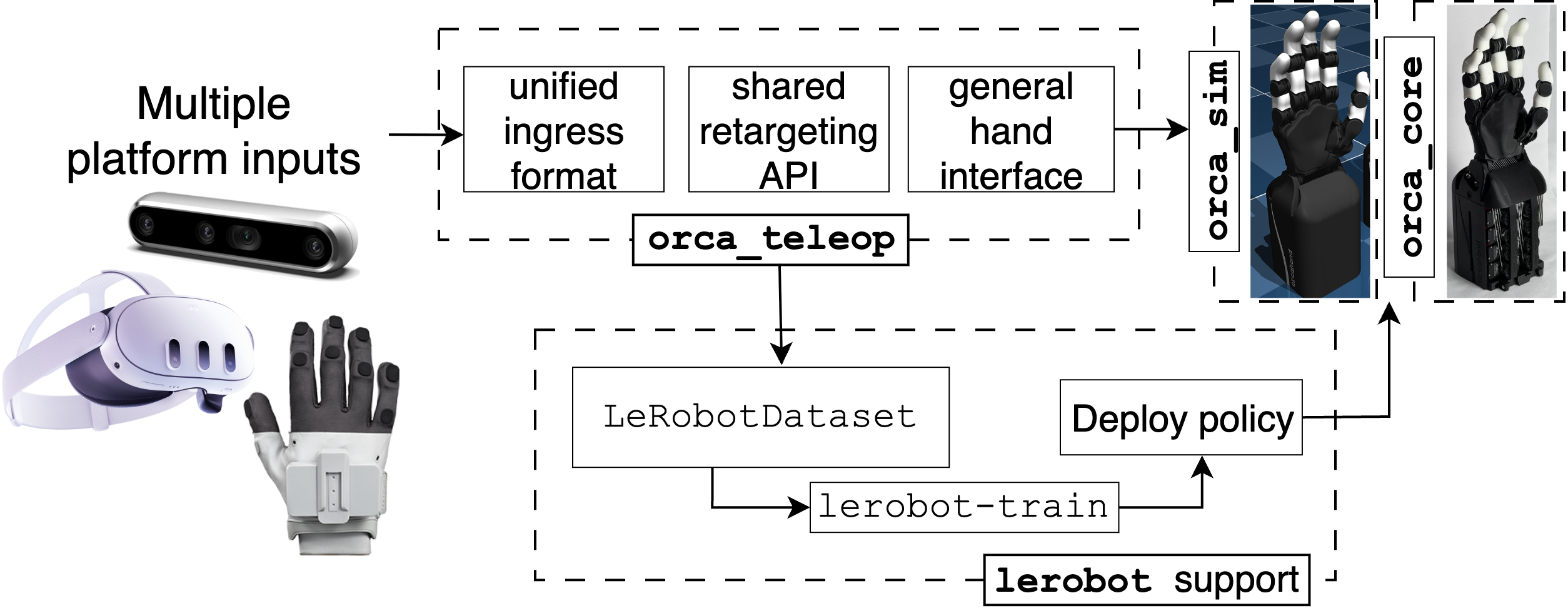
- A unified software stack that covers everything you need: control, simulation, teleoperation (remote control by a person), and learning from demonstrations.
Their goal is to make advanced hand manipulation research as accessible and reproducible as working with simpler robot grippers.
Key questions the paper asks
- How can we make robot hands (with many fingers and joints) easy to use for learning-based research, just like common robot arms with grippers?
- Can we package control, simulation, teleoperation, and mapping human hand motions to a robot hand into one simple, open-source system?
- Will this system play nicely with popular robot-learning tools so researchers can use the same data and training pipelines they already know?
- Is the low-cost, 3D‑printable Orcahand durable enough for real use?
- Can we quickly collect human examples and train a robot hand to do a task on its own?
How they did it (methods explained simply)
The hardware: Orcahand
Think of Orcahand as a robot hand designed to be like a human hand:
- It has 17 “degrees of freedom” (joints it can move), similar to how your hand has joints in each finger and a movable wrist.
- It uses tendons (like strings) to pull joints, similar to how muscles and tendons move your fingers.
- It’s 3D‑printable and uses off-the-shelf parts, keeping cost around $3,000 (much cheaper than many commercial robot hands).
- Variants can add fingertip touch sensors and better joint sensors if you need them.
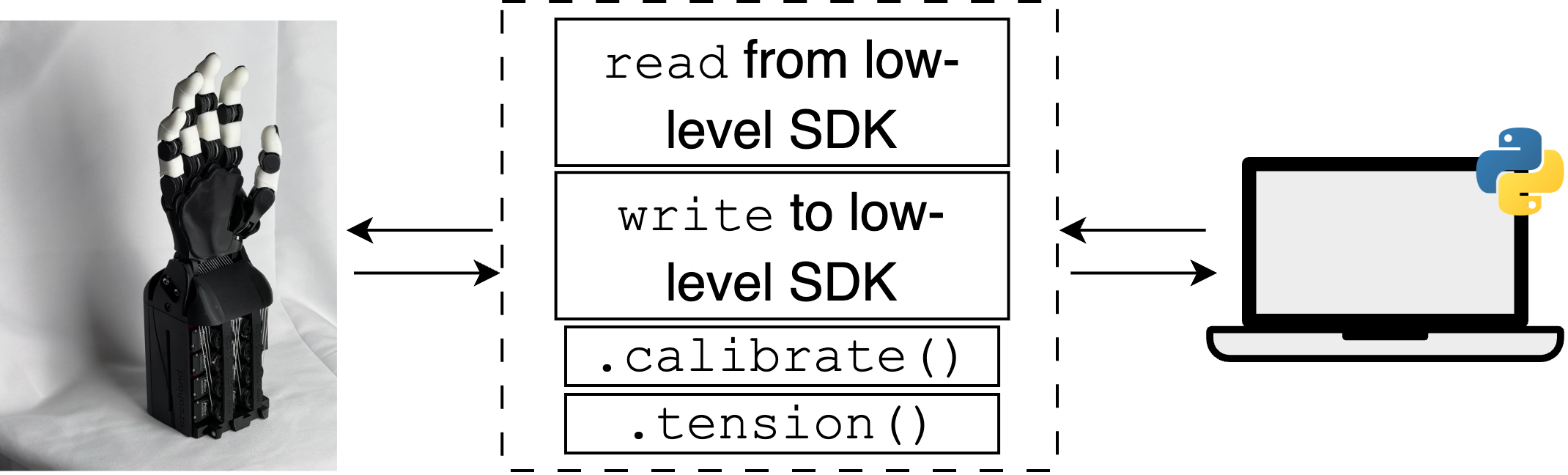
The software: one “plug” for real and simulated hands
The orca software is organized so the same code can control:
- A real Orcahand in the lab, and
- A simulated hand in a computer physics engine.
This “one interface for both” idea means you can test ideas in simulation and then run the same code on the real hand without rewriting everything.
What’s inside the software stack:
- Low-level control: safely talks to motors and reads sensors.
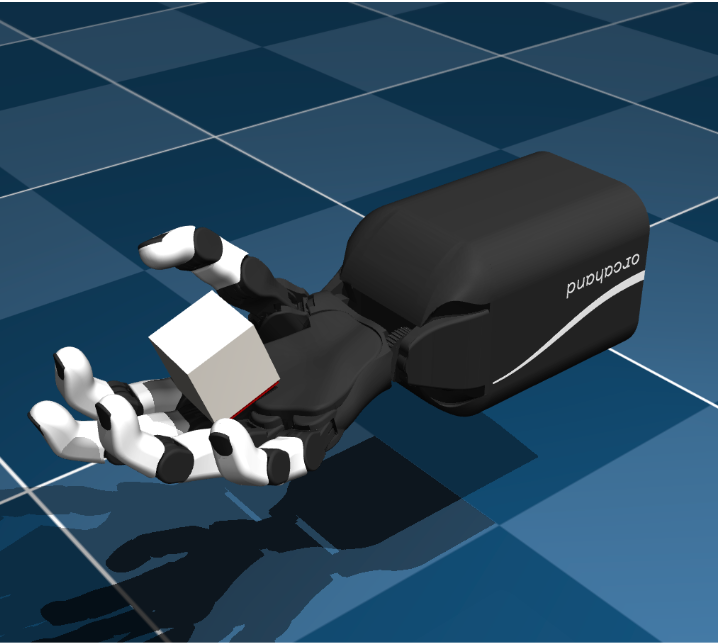
- Simulation: models the hand and tasks in physics simulators (like MuJoCo). This lets you practice tasks without hardware.
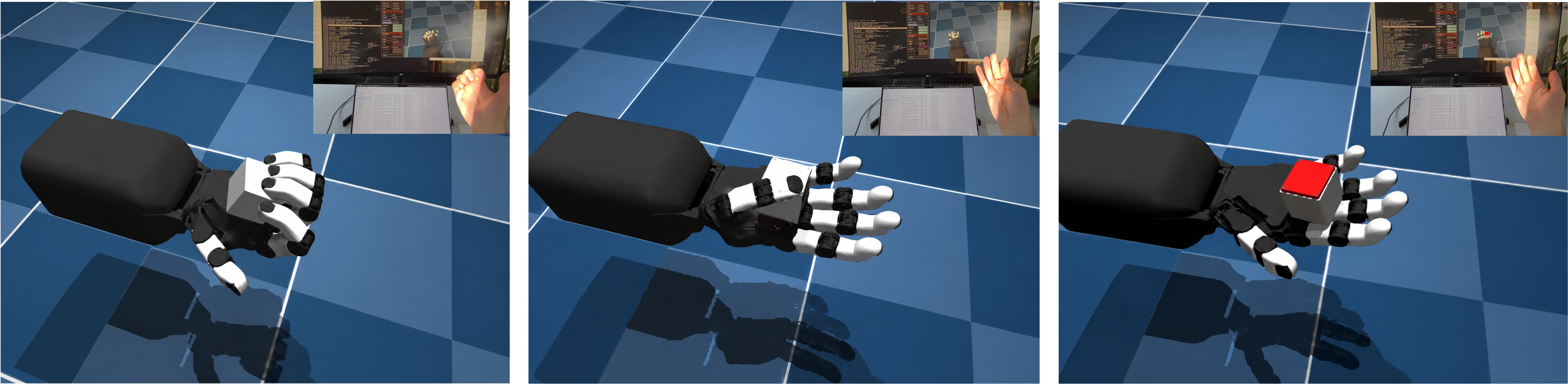
- Teleoperation: controls the robot hand by tracking a human hand using everyday devices like:
- A VR headset (Meta Quest),
- A regular camera with hand-tracking (MediaPipe),
- Motion-capture gloves.
- Retargeting: this is how the system translates a human hand pose to the robot hand’s joint angles. Picture it like fitting your hand’s pose into the robot’s “skeleton,” adjusting for size and shape differences so the robot copies you as closely as possible, and doing it fast enough to feel responsive.
Learning from demonstrations
The stack integrates with LeRobot, an open-source library for robot learning. That means:
- You can record “expert” demonstrations by teleoperating the hand.
- You can train policies (computer programs that decide what the robot should do) using those demos, with standard methods like behavioral cloning (learning by copying).
- You can evaluate and iterate, using the same formats and tools other robot researchers use.
A demo of the full workflow
The authors show a complete example:
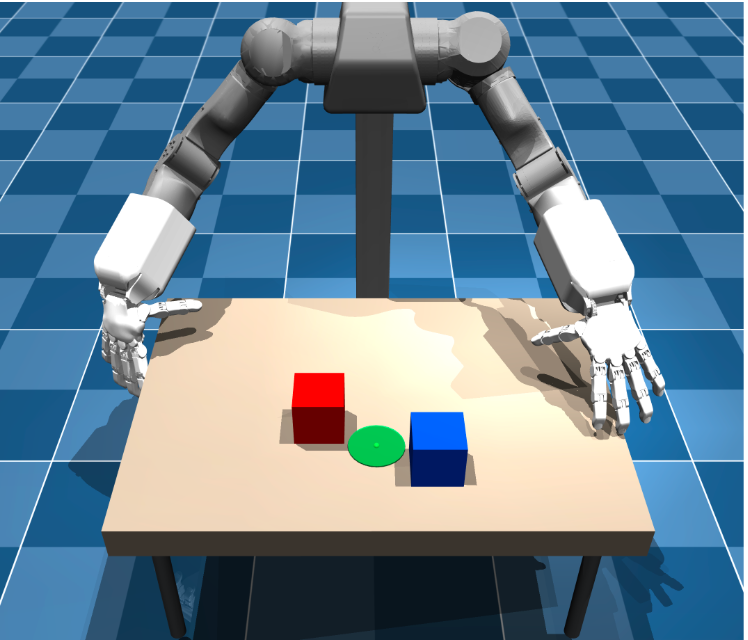
- They teleoperated a (simulated) Orcahand using a Meta Quest headset and recorded just 10 demonstrations of an in-hand object reorientation task (turning an object in the hand).
- They trained a standard policy (ACT) using the LeRobot library.
- The learned policy succeeded in 9 out of 10 test runs, using camera views and the hand’s own joint readings as inputs.
They also ran a 5‑hour durability test on the real hand, repeatedly opening and closing it across all joints, without overheating or breaking.
Main findings and why they matter
- Unified stack: orca puts control, simulation, teleoperation, and human-to-robot motion mapping under one roof, with one shared interface. This reduces “glue code” and makes projects more reproducible.
- Real ↔ Sim parity: the same code works for both the real and simulated hand, speeding up research and lowering hardware barriers.
- Works with standard learning tools: because orca integrates with LeRobot, researchers can reuse familiar datasets, training code, and evaluation pipelines.
- Affordable, repairable hardware: the 3D‑printable Orcahand is much cheaper than many commercial robot hands and is designed to be easy to fix.
- Practical success: with only 10 demos collected via a consumer VR headset, they trained a policy that performed the task reliably (9/10 successes).
- Durability: the hand survived a 5‑hour stress test with no failures, suggesting it can handle sustained use.
Why this matters: Research on multi-fingered hands is important for reaching human-like dexterity—things like manipulating small objects, rotating them inside the hand, or using tools. Until now, it’s been hard to do because the tools were scattered, expensive, and tricky to integrate. Orca lowers the barrier so more people can experiment and contribute.
Implications and potential impact
- Democratizing dexterity research: Students, small labs, and hobbyists can afford to build and use a capable robot hand and a professional-grade learning stack.
- Faster progress and better reproducibility: Shared tools mean less time reinventing setups and more time making new discoveries that others can repeat.
- Better data and training at scale: Since orca works with everyday devices and standard libraries, it’s easier to collect demonstrations and train stronger policies, potentially even from large amounts of human video in the future.
- Real-world relevance: Hands that resemble human hands can more naturally interact with objects, tools, and spaces designed for people.
Limitations and future work
- Simulation is imperfect: modeling tendons and soft contacts exactly is hard, so sim-to-real differences remain.
- Packaging trade-offs: the stack is split into several subpackages (good for development, but can be confusing for beginners).
- More input devices: teleoperation could support even more sensors and sources.
- Balancing sim-first and real-world: designing equally for both may not always be ideal; future versions might specialize further.
In short, orca offers an affordable robot hand and a complete, open-source software stack that makes advanced “robot hand” research much more accessible, consistent, and fast. This could help the field move closer to truly dexterous, human-like robot manipulation.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise, actionable list of what remains missing, uncertain, or unexplored in the paper, to guide future research:
- Simulation fidelity: No quantitative validation of tendon routing, compliance, joint friction, and soft-finger contact models against the real hand; lacks systematic parameter identification and error bounds between sim and hardware across tasks.
- Tactile simulation: Absence of tactile sensor simulation (taxel geometry, noise, latency, elastic skin deformation), preventing policies that rely on touch from being trained/evaluated in sim.
- Sim-to-real transfer: No empirical study of policies trained in orca_sim transferring to the physical hand, nor strategies (domain randomization, dynamics randomization, sensor noise modeling) to improve transfer.
- Retargeting accuracy: Retargeter quality is not quantified (per-joint angle error, fingertip pose error, pinch distance error); no ablations on Huber loss parameters, weighting of key vectors, or solver convergence/stability under noisy/occluded landmarks.
- End-to-end latency: Teleoperation pipeline lacks measurements of capture-to-actuation latency and jitter across devices (MediaPipe, Meta Quest, gloves), and their impact on user performance and demo quality.
- Calibration robustness: No evaluation of calibration/tensioning repeatability over time, temperature, or after maintenance; no metrics on drift, slack, or re-tension frequency required.
- Hardware performance characterization: Missing benchmarks for maximum fingertip force, joint torque limits, bandwidth, backdrivability, speed, payload capacity, energy consumption, and noise under various actuation modes.
- Variant comparisons: No head-to-head evaluation of actuator variants (Dynamixel vs Feetech) or proprioception variants (with vs without joint encoders) on control accuracy, durability, and learning outcomes.
- Tactile sensing characterization: No calibration procedure, noise spectra, spatial resolution validation, hysteresis, and latency characterization for the Hall-effect tactile sensors; not used in any end-to-end learning or control experiment.
- Durability beyond cyclic test: Single 5-hour open/close cycle test is insufficient; lacks long-term wear studies (hundreds of hours), failure modes analysis (tendon fray, pulley wear), MTBF estimates, and field-repair time/cost metrics.
- Safety and fault handling: No description or testing of safety mechanisms (current/torque limits, soft limits, watchdogs), collision detection, or emergency stop behavior under communication loss or solver failures.
- Control modes: Only joint-position/current interfaces described; no evaluation of torque/impedance control feasibility, stability, or benefits for contact-rich manipulation.
- Teleoperation devices coverage: Limited to a few publishers; no support or benchmarking for other common devices (Valve Index, Leap Motion, Apple Vision Pro, ARKit/ARCore), nor multi-sensor fusion (e.g., glove + vision) or haptics.
- User adaptation: No study of per-user calibration (hand size, kinematic idiosyncrasies) and its effect on retargeting and demo quality; absence of automatic personalization or online adaptation.
- Dataset scale and diversity: Demonstration pipeline validated on only 10 demos and a single in-hand task; no experiments varying demo count, object diversity, task complexity, or multi-environment data.
- Benchmarking and baselines: No comparisons to existing open dexterity stacks or teleop systems, nor standardized benchmark tasks with public leaderboards for reproducibility and fair comparison.
- Policy scope: Only behavioral cloning (ACT) in sim; no comparisons to Diffusion Policy, π0-style VLA, or hybrid RL+IL; no study of robustness, generalization to novel objects, or closed-loop tactile/force observations.
- Real-world policy deployment: Trained policies are not deployed on the physical hand; no evaluation of perception-to-action pipelines on hardware, camera calibration robustness, or real-world success/latency.
- Vision stack details: Camera intrinsics/extrinsics, synchronization, data compression, and lighting sensitivity are unspecified; no analysis of multi-view fusion or failure under occlusions.
- Arm-hand integration: Although Panda and OpenArm are supported, there are no end-to-end arm+hand experiments (e.g., grasping, tool use, bimanual tasks), IK stability benchmarks, or workspace analysis.
- Data quality controls: No tooling for automatic demo quality assessment (e.g., smoothness, feasibility in replay), de-duplication, or label consistency checks in the LeRobotDataset format.
- Reproducibility tooling: Absence of containerized environments, pinned dependencies, hardware/firmware versions, and CI tests that guarantee the examples and results (9/10 success) are fully reproducible.
- Packaging friction: The multi-package design is acknowledged as a limitation, but no concrete plan for a meta-package, version pinning across subpackages, or a monorepo migration path; no ROS2 bindings for broader ecosystem compatibility.
- Performance on resource-constrained systems: No profiling of CPU/GPU/RAM/network usage for teleop, sim, and training; unclear minimum viable hardware specs for labs with limited resources.
- Licensing of assets: While code is MIT, the licensing and redistribution terms for 3D models, tactile sensor designs, and third-party dependencies (URDF/MJCF assets) are not clarified.
- Extensibility to other hands: Unclear how easily the stack ports to non-Orca hands (e.g., Shadow, Allegro, LEAP); missing adaptor guidelines, required URDF/MJCF conventions, and calibration procedures.
- Evaluation under disturbances: No tests of controller robustness to external perturbations (impacts, object slips), sensor dropouts, or network failures; no fallback strategies or degraded modes.
- Human-video learning: The introduction motivates learning from in-the-wild human video, but the stack lacks demonstrated pipelines for video-to-retargeting, weak supervision alignment, or ego/exo pose lifting into robot actions.
- Task library breadth: Task coverage appears narrow (in-hand cube orientation); no suite covering non-prehensile dexterity, tool use, cloth manipulation, or dynamic regrasping to stress different contact regimes.
- Documentation and onboarding: No empirical evaluation of onboarding time, tutorial coverage, or developer experience; missing user studies or metrics on installation success rates across OSes.
- Security and privacy: No discussion of security for gRPC streams (auth, encryption) when teleop is over networks, nor privacy considerations for video/hand-tracking data collection and storage.
- Metrics standardization: Lacks standardized metrics for dexterity (success, completion time, contact force profiles, slip rate, energy), hindering cross-paper comparisons and dataset curation.
Practical Applications
Below is an overview of practical, real-world applications enabled by the paper’s open-source dexterity platform (hardware + unified software stack spanning control, simulation, teleoperation, retargeting, and learning). Each item highlights specific use cases, relevant sectors, plausible tools/products/workflows, and assumptions or dependencies that affect feasibility.
Immediate Applications
- Bold demo-to-policy pipeline for dexterous hands (R&D and teaching)
- Use case: Collect expert demos via VR/camera/gloves, train ACT/Diffusion Policy with LeRobot, and evaluate in sim or on hardware for tasks like in-hand reorientation or grasping.
- Sectors: Academia, Robotics startups, Software/AI.
- Tools/workflows: Orca teleop + retargeter + LeRobotDataset + learner (ACT/DP/π0-style) + shared sim/real interface.
- Assumptions/dependencies: Modest GPU for training; basic safety procedures; availability of VR headset or webcam; policy performance tied to demonstration quality and task complexity.
- Standardized, reproducible dexterity benchmarks and datasets
- Use case: Cross-lab benchmarks (e.g., cube reorientation, stacking) with shared MuJoCo/ManiSkill assets and one data/action format to publish comparable results and datasets.
- Sectors: Academia, Open-source communities, Conferences/Journals.
- Tools/workflows: Orca simulation environments, LeRobotDataset format, evaluation templates and leaderboard scripts.
- Assumptions/dependencies: Community adoption of common task specs; consistent logging; stable releases of sim assets.
- Rapid feasibility studies for dexterous tasks in manufacturing R&D
- Use case: Prototype cable routing, plug insertion, part reorientation, and simple tool use in sim, then port to a Franka/OpenArm with an Orca hand for pilot trials.
- Sectors: Manufacturing, Electronics, Contract engineering.
- Tools/workflows: URDF/MJCF assets, ManiSkill GPU-parallel training, Franka/OpenArm integration, quick teleop to seed demos.
- Assumptions/dependencies: Tasks within reachable workspace; tolerance to sim-to-real gaps; operator safety and guarding for pilots.
- Remote labs and training via low-cost teleoperation
- Use case: Students or engineers teleoperate a simulated or lab-based hand with MediaPipe or Meta Quest from home to perform dexterous tasks and collect data.
- Sectors: Education, Corporate training, EdTech.
- Tools/workflows: gRPC teleop pipeline, browser/VR ingress, cloud-hosted sim, LMS-integrated assignments.
- Assumptions/dependencies: Stable network; 40–50 fps teleop latency tolerance; institutional compute or cloud credits.
- Tactile sensing research and perception-action loops
- Use case: Evaluate tactile policies, slip detection, contact-rich manipulation with optional fingertip sensors and joint encoders.
- Sectors: Academia, Haptics R&D, Robotics research labs.
- Tools/workflows: Orca tactile-enabled fingertips, closed-loop joint/tactile observations, tactile-visual fusion baselines.
- Assumptions/dependencies: Availability of tactile fingertip variant; sensor calibration; custom learning code for tactile inputs.
- Startup prototyping for dexterous robot products
- Use case: Build investor/customer demos of dexterous capabilities on a $3k open hand rather than$50–60k proprietary hands; iterate quickly on software/skills.
- Sectors: Robotics startups, System integrators.
- Tools/workflows: Orca core API, Panda/OpenArm mounting kits, demo packs (teleop + canned tasks), CI for sim regression tests.
- Assumptions/dependencies: Mechanical mounting and cable management; sufficient actuation torque for demo tasks; warranty/maintenance planning.
- Curriculum kits for “Dexterous Manipulation 101”
- Use case: Semester labs: assemble/maintain a hand, retarget human motion, collect data, train a policy, and evaluate sim-to-real transfer.
- Sectors: Higher education, Workforce development.
- Tools/workflows: Lab manuals (CAD files, tensioning/calibration), starter notebooks for training/evaluation, safety checklists.
- Assumptions/dependencies: 3D-printer access or purchase; actuator supply; instructor familiarity with Python/ROS-like stacks.
- Baselines for retargeting and hand-tracking algorithm evaluation
- Use case: Use the provided FK/Jacobian-based retargeter and Huber-loss optimization as a baseline to test new computer-vision landmark detectors or kinematic solvers.
- Sectors: Computer vision, AR/VR, Robotics software.
- Tools/workflows: MediaPipe/Meta Quest/Manus publishers, shared landmark conventions, ablation harnesses.
- Assumptions/dependencies: Quality of human landmark detection; anthropomorphic similarity; varying hand sizes and occlusions.
- Shared cloud “DexSim Farm” for data generation and pretraining
- Use case: Generate large-scale synthetic demonstrations and policy rollouts with ManiSkill GPU-parallel sim to bootstrap training for labs without hardware.
- Sectors: Academia, AI labs, Cloud providers.
- Tools/workflows: Containerized sim, job queues, dataset artifact registry (LeRobotDataset).
- Assumptions/dependencies: Cloud budget; reproducibility controls; sim fidelity sufficient for chosen tasks.
- Policy and funding guidance pilots for reproducibility and openness
- Use case: Agencies and venues pilot checklists that prefer open hardware/software, dataset formats, and end-to-end reproducible pipelines (e.g., orca + LeRobot).
- Sectors: Policy, Funding bodies, Standards orgs.
- Tools/workflows: Grant and artifact-review templates, curated open task suites, documentation standards.
- Assumptions/dependencies: Community buy-in; legal review for licensing and export; minimal compliance overhead for applicants.
Long-Term Applications
- General-purpose dexterous cells in factories (reduced changeover)
- Use case: Multi-step assembly, cable dressing, fastening, and tool-mediated tasks on mixed product lines with learned policies and minimal retooling.
- Sectors: Manufacturing, Electronics, Automotive.
- Tools/products: Ruggedized Orca-like hands, safety-rated controllers, policy orchestration (task graphs), vision/tactile fusion.
- Assumptions/dependencies: Industrial MTBF and cycle-time targets; safety certification; robust sim-to-real; lifecycle maintenance workflows.
- Household/service robots performing human-like manipulation
- Use case: Opening containers, sorting laundry, organizing, operating home appliances, fine grasping of deformables.
- Sectors: Consumer robotics, Assistive tech.
- Tools/products: Cost-optimized hand variants, embedded learners, home-safe teleop fallback, policy updates via cloud.
- Assumptions/dependencies: Cost reduction, safety and reliability in unstructured settings, low-power inference, privacy-preserving data updates.
- Telepresence dexterous manipulation in hazardous or remote sites
- Use case: Lab sample handling, nuclear maintenance, space/underwater operations, disaster response with VR teleop and partial autonomy.
- Sectors: Energy, Aerospace, Public safety.
- Tools/products: Low-latency comms, haptic/tactile feedback, shared autonomy overlays, rugged end-effectors.
- Assumptions/dependencies: Network QoS; ergonomic operator stations; compliance control and force-limiting; regulatory approvals.
- “Dexterity foundation models” trained across platforms and tasks
- Use case: Cross-embodiment policies (π0/RT-style) fine-tuned to new hands/arms with small task datasets; policy marketplaces for skills (e.g., “insert USB-C”, “wind cable”).
- Sectors: Software/AI, Robotics platforms, Integrators.
- Tools/products: Multimodal pretraining corpora (vision-language-action-tactile), unified action/observation schemas, deployment SDKs.
- Assumptions/dependencies: Large-scale shared datasets, IP/data-sharing agreements, robust embodiment retargeting.
- Learning directly from in-the-wild human video at scale
- Use case: Train hands from egocentric/Internet videos with weak supervision and improved retargeting; drastically cut teleop data needs.
- Sectors: Academia, AI labs, Consumer robotics.
- Tools/products: Video-to-action pipelines, privacy-aware data curation, morphology-aware retargeters, synthetic data augmentation.
- Assumptions/dependencies: Consent and privacy compliance; robust 3D hand pose from video; domain adaptation for contact and forces.
- Tactile-visual servoing and new sensing products
- Use case: Slip-aware grasping, force-sensitive insertion, deformable manipulation using dense fingertip taxels + vision.
- Sectors: Sensors, Industrial robotics, Medical/lab automation.
- Tools/products: Next-gen fingertip modules, calibration rigs, tactile simulators, real-time fusion stacks.
- Assumptions/dependencies: Scalable sensor manufacturing; accurate tactile simulation; time synchronization; wear-resistant skins.
- Open standards for dexterous hand control, datasets, and safety
- Use case: ROS2-like conventions for joint/tactile schemas, dataset metadata, safety states, and teleop interfaces to ease cross-vendor interoperability.
- Sectors: Standards bodies, Industry consortia, Policy.
- Tools/products: Spec documents, compliance tests, certification programs.
- Assumptions/dependencies: Broad industry participation; backwards compatibility; liability frameworks for shared autonomy.
- Education-to-industry pipeline for dexterity
- Use case: National programs that start with classroom sim + teleop, then capstones on real hands, feeding into apprenticeships for dexterous automation.
- Sectors: Education, Workforce development, Regional economic development.
- Tools/products: Subsidized kits, curricula, remote labs, competition leagues.
- Assumptions/dependencies: Funding; teacher training; supply-chain stability for actuators/electronics.
- Affordable research platforms for prosthetics and rehabilitation (non-clinical)
- Use case: Universities prototype control strategies, sensors, and training regimes on Orca-like hands as pre-clinical research platforms.
- Sectors: Healthcare research, Bioengineering.
- Tools/products: Myo/EMG integration modules, adaptive control algorithms, haptic feedback experiments.
- Assumptions/dependencies: Not a medical device; clinical translation requires regulatory-grade hardware, safety, and trials.
- Plug-and-play “Dexterity-as-a-Service” for SMEs
- Use case: Hosted sim-to-real workflow where SMEs upload task videos or demos, receive trained policies and setup guides for their arm+hand configuration.
- Sectors: SMEs in manufacturing/logistics, Robotics integrators.
- Tools/products: Cloud training pipeline, hardware-compatibility checker, remote support, OTA policy updates.
- Assumptions/dependencies: Secure data transfer; IP protection; support for long-tail hardware variations; SLAs for uptime and support.
Notes on cross-cutting dependencies
- Simulation fidelity remains a bottleneck for tendon and soft-contact modeling; domain randomization and tactile feedback can mitigate but not eliminate gaps.
- Supply chain and maintainability of low-cost actuators and sensors influence uptime and total cost of ownership.
- Teleop latency and hand-tracking noise cap demonstration quality; improved ingress devices and filtering help.
- Safety, certification, and liability frameworks determine deployment speed in industrial/consumer settings.
- Community adoption of shared formats (e.g., LeRobotDataset) and interfaces accelerates reproducibility and ecosystem growth.
Glossary
- ACT: An imitation-learning policy architecture (Action Chunking Transformer) used for robot control. "such as ACT~\citep{zhaoLearningFineGrainedBimanual2023a}, Diffusion Policy~\citep{chiDiffusionPolicyVisuomotor2024a} or ~\citep{blackVisionLanguageActionFlow2026},"
- Analytical Jacobian: The exact kinematic Jacobian mapping joint velocities to end-effector or landmark velocities, derived from the model (not numerical). "including joint limits and analytical Jacobians from the FK tree,"
- Anthropomorphic: Having human-like morphology or structure. "Anthropomorphic hands are a more natural platform for dexterous robot learning"
- Antagonistic tendon pair: Two opposing tendons actuating a joint to provide bidirectional control. "each finger joints is fully actuated by an antagonistic tendon-pair~\citep{christophORCAOpenSourceReliable2025}."
- Behavioral cloning: Supervised learning that imitates expert demonstrations by mapping observations to actions. "train autonomous policies based on behavioral cloning."
- Bimanual: Involving two arms or hands working together. "often requiring bimanual setups even for simple reorientation tasks."
- Closed-loop control: Control that uses feedback from sensors to continuously adjust actions. "enabling improved proprioception and closed-loop control."
- Degrees of Freedom (DoF): Independent joint variables defining a mechanism’s configuration. "Specifically, the Orcahand has 17 degrees of freedom (DoF, 1 for wrist, 16 for fingers):"
- Diffusion Policy: A visuomotor policy learned via action diffusion models for robot control. "Diffusion Policy~\citep{chiDiffusionPolicyVisuomotor2024a}"
- Embodiment gap: The mismatch between human and robot bodies that complicates transferring skills. "hands minimize the embodiment gap between robots and human demonstrators."
- End effector: The tool or device at the end of a robot arm that interacts with the environment. "effective end effectors"
- Forward kinematics (FK): Computing the pose of links/end-effectors from joint values. "whose forward kinematics (FK) best matches"
- Foundation model: A large pre-trained model designed to generalize across tasks and transfer to new domains. "large-scale foundation models for arms with grippers"
- gRPC: A high-performance remote procedure call framework for networked communication. "then dispatched over gRPC to either a real or simulated sink,"
- GPU-parallel simulation: Running many simulation instances concurrently on GPUs to accelerate training. "enables GPU-parallel simulation for large-scale training"
- Hall-effect 6D force/torque sensor: A magnetic sensing device measuring multi-axis forces and torques at the fingertip. "custom-manufactured Hall-effect 6D force/torque sensors (Figure~\ref{fig:fingertip_variants}, C)"
- Huber loss: A robust loss that is quadratic for small errors and linear for large errors, reducing sensitivity to outliers. "the retargeter employs a Huber loss on the key vectors mismatch,"
- In-hand reorientation: Manipulating and rotating an object within the hand without external supports. "an in-hand reorientation task by teleoperation"
- Inverse kinematics (IK): Computing joint configurations that realize a desired pose of a link/end-effector. "matching them with the hand carpals' pose via inverse kinematics."
- Leader-follower scheme: A teleoperation setup where a human-operated device (leader) directly commands a robot (follower). "Grippers are easy to teleoperate: leader-follower schemes~\citep{zhaoLearningFineGrainedBimanual2023a,wuGELLOGeneralLowCost2024a,cadeneLeRobotOpenSourceLibrary2026} let an operator drive a robot arm directly,"
- LeRobotDataset: A standardized dataset format used by the LeRobot library for storing demonstrations. "are recorded in the LeRobotDataset format,"
- ManiSkill: A generalizable manipulation simulation platform supporting GPU-parallel environments. "integrated with simulation environments such as ManiSkill~\citep{muManiSkillGeneralizableManipulation2021}"
- MJCF: MuJoCo’s XML-based model format for describing robots and environments. "URDF and MJCF-based simulation."
- Mocap: Motion capture; systems that capture human motion for retargeting or analysis. "Manus mocap gloves~\citep{manus_metagloves_pro}"
- MuJoCo: A physics engine for model-based control and simulation of robots. "MuJoCo~\citep{todorovMuJoCoPhysicsEngine2012} models of the hand,"
- Pi_0 (π_0): A vision-language-action flow model for general robot control. "~\citep{blackVisionLanguageActionFlow2026}"
- Proprioception: Sensing of a robot’s internal joint states and configurations. "enabling improved proprioception"
- Range of Motion (ROM): The span of allowable motion for joints. "full ROM calibration"
- Retargeting: Mapping human motion data onto a robot’s kinematic structure. "retargeting human motion onto the robot,"
- Tactile sensing: Sensing contact forces/pressure at the skin or fingertips of a robot. "they support tactile sensing,"
- Taxel: A tactile sensing element (tactile pixel) in an array. "providing 51 taxels-per-digit on the thumb and pinky, and 83 taxels-per-digit on the remaining fingers."
- Teleoperation: Controlling a robot remotely by a human operator in real time. "teleoperation pipelines have been pivotal in producing the large demonstration datasets"
- Tendon-driven: Using tendons (cables) for actuation and transmission of forces to joints. "a tendon-driven, fully 3D-printable hand"
- URDF: Unified Robot Description Format; a standard XML format to describe robot kinematics and visuals. "URDF and MJCF-based simulation."
- Visuo-motor: Involving both visual perception and motor control in a policy. "visuo-motor inputs."
Collections
Sign up for free to add this paper to one or more collections.