Ruka-v2: Tendon Driven Open-Source Dexterous Hand with Wrist and Abduction for Robot Learning
Abstract: Lack of accessible and dexterous robot hardware has been a significant bottleneck to achieving human-level dexterity in robots. Last year, we released Ruka, a fully open-sourced, tendon-driven humanoid hand with 11 degrees of freedom - 2 per finger and 3 at the thumb - buildable for under $1,300. It was one of the first fully open-sourced humanoid hands, and introduced a novel data-driven approach to finger control that captures tendon dynamics within the control system. Despite these contributions, Ruka lacked two degrees of freedom essential for closely imitating human behavior: wrist mobility and finger adduction/abduction. In this paper, we introduce Ruka-v2: a fully open-sourced, tendon-driven humanoid hand featuring a decoupled 2-DOF parallel wrist and abduction/adduction at the fingers. The parallel wrist adds smooth, independent flexion/extension and radial/ulnar deviation, enabling manipulation in confined environments such as cabinets. Abduction enables motions such as grasping thin objects, in-hand rotation, and calligraphy. We present the design of Ruka-v2 and evaluate it against Ruka through user studies on teleoperated tasks, finding a 51.3% reduction in completion time and a 21.2% increase in success rate. We further demonstrate its full range of applications for robot learning: bimanual and single-arm teleoperation across 13 dexterous tasks, and autonomous policy learning on 3 tasks. All 3D print files, assembly instructions, controller software, and videos are available at https://ruka-hand-v2.github.io/ .

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper introduces Ruka‑v2, a new, low‑cost robot hand that moves a lot like a human hand. It adds two big abilities missing from many affordable robot hands:
- A 2‑direction wrist that bends up/down and side‑to‑side
- Fingers that can spread apart and squeeze together (abduction/adduction)
The whole design is open‑source, mostly 3D‑printed, and costs under about $1,500 to build. The team shows that these upgrades make the hand faster and more successful at tricky tasks like writing, picking up thin objects, and working in tight spaces.
What were the researchers trying to do?
Here are the main goals, in everyday terms:
- Add a wrist and finger‑spreading to make a robot hand feel more human‑like and useful in real tasks.
- Keep the hand affordable and easy to build, repair, and modify for research and education.
- Make it easier to control and measure the hand’s movements without expensive equipment.
- Test whether these upgrades actually help people complete tasks more quickly and reliably.
- Show that the hand works both when a person controls it (teleoperation) and when it learns to act on its own (robot learning).
How does it work, and how did they test it?
The hand design
- Tendon‑driven fingers: Instead of putting a motor in each finger joint, motors live in the “forearm” and pull on strings (tendons), a lot like how your muscles pull on tendons to move your fingers. Think of bicycle brake cables or a puppet with strings: motors pull, tendons move joints.
- A 2‑direction wrist: The wrist bends up/down and side‑to‑side using a clever mechanism that keeps the finger tendons running smoothly through the middle of the wrist. That means wrist motion doesn’t mess up finger control.
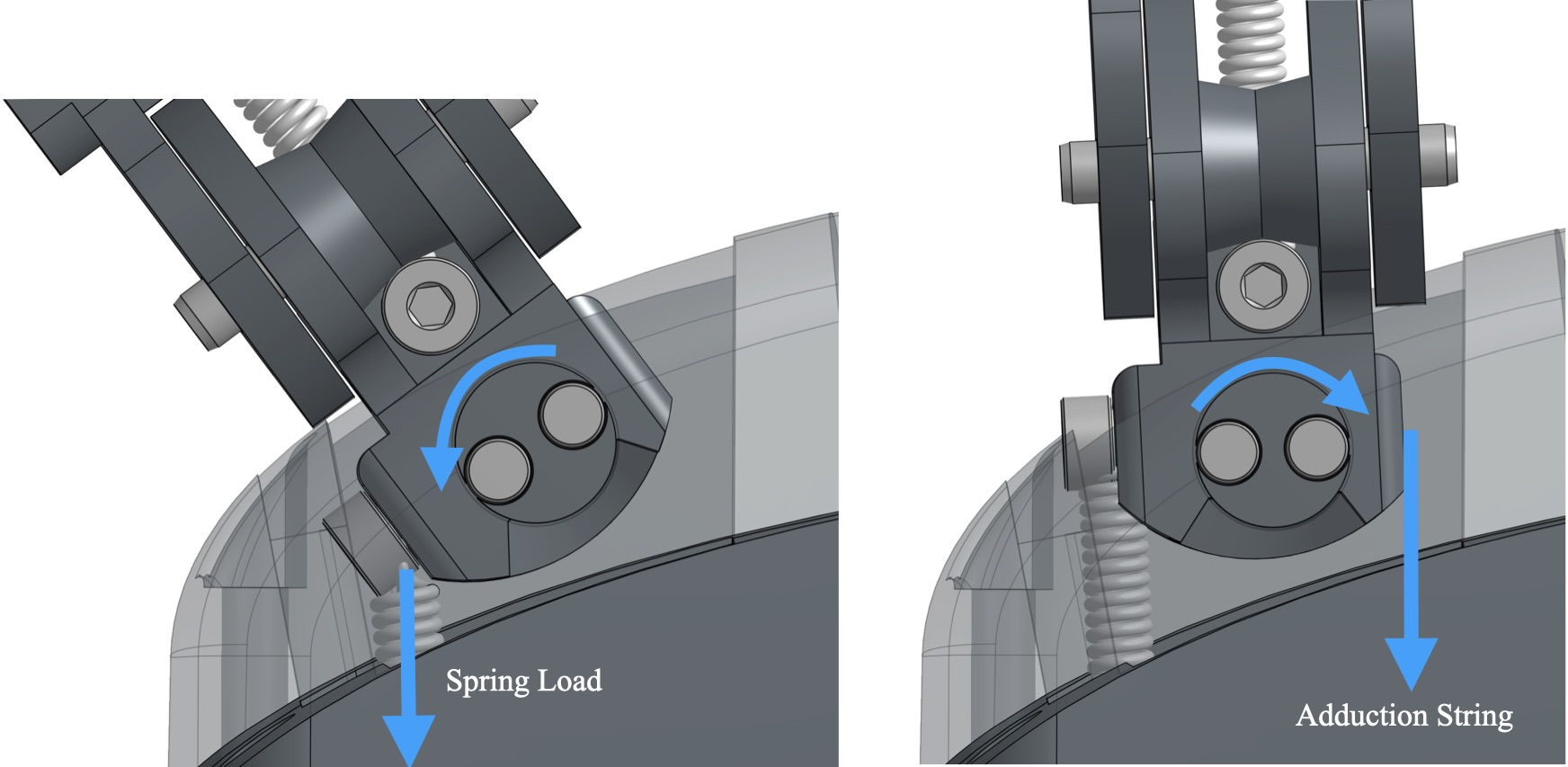
- Finger spreading: Each finger (except the middle finger, which stays fixed for stability) can spread out or move inward. A spring pulls the finger outward by default, and a tendon pulls it inward when needed. This helps with pinching thin things or rotating objects in the hand.
- Soft fingertips: The tips use 3D‑printed, soft “e‑flesh” parts that help with gentle gripping and can be upgraded with touch sensors.
- Clip‑on angle sensors: They designed small magnetic sensors that snap onto joints to measure angles accurately. This avoids pricey motion‑capture gloves and helps calibrate the hand.
How they controlled it
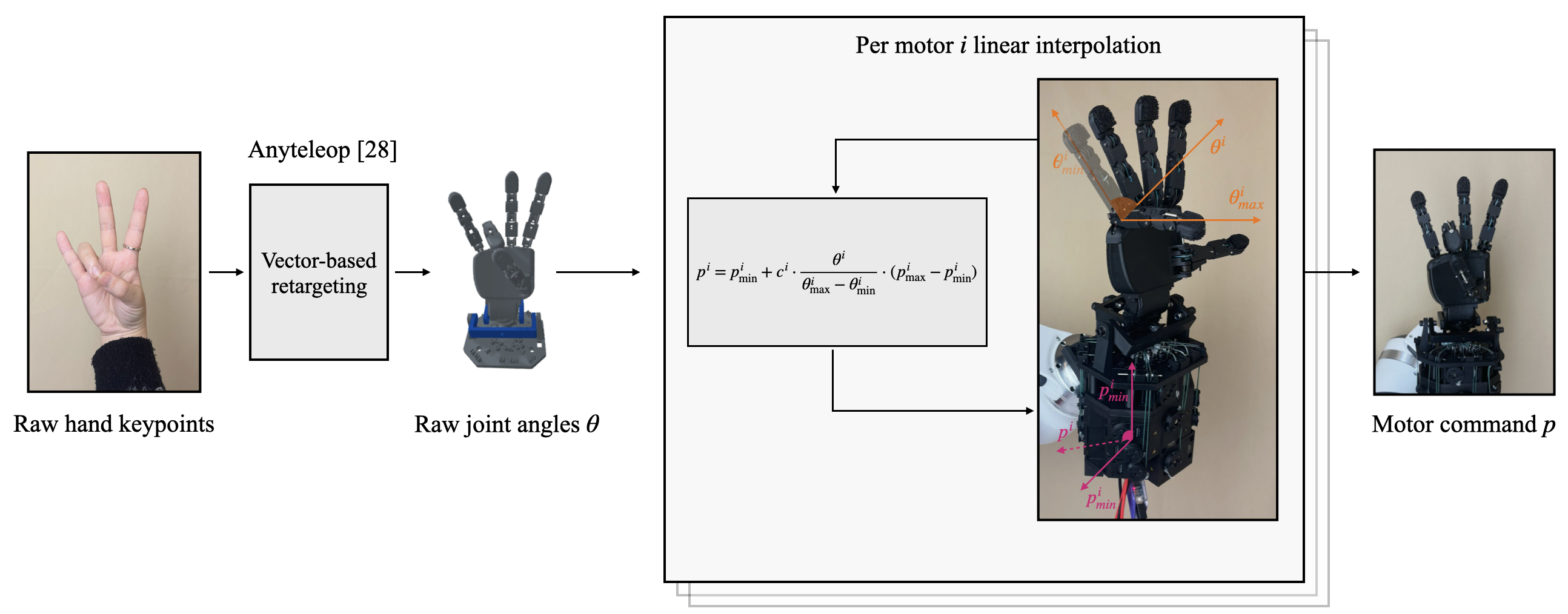
- Mapping joint angles to motors: They used a simple, calibrated “rule of thumb” that says, “If you want a joint at angle X, set the motor to position Y,” based on the joint’s minimum and maximum angles. It’s like marking start and end points on a ruler and then sliding to the right spot in between.
- Mapping human hand to robot hand: Using a camera‑based system, they track the person’s hand and arm, then convert that into robot joint angles. This lets a person control the robot hand through a VR headset and controllers.
Teaching it to act on its own
- They collected about 100 expert demonstrations per task by teleoperating the hand and arm.
- They added small, random “wiggles” during data collection so the learned policy would practice recovering from mistakes.
- They trained a model that looks at a camera view plus the robot’s joint positions to predict what to do next, using a modern neural network.
What kinds of tests did they run?
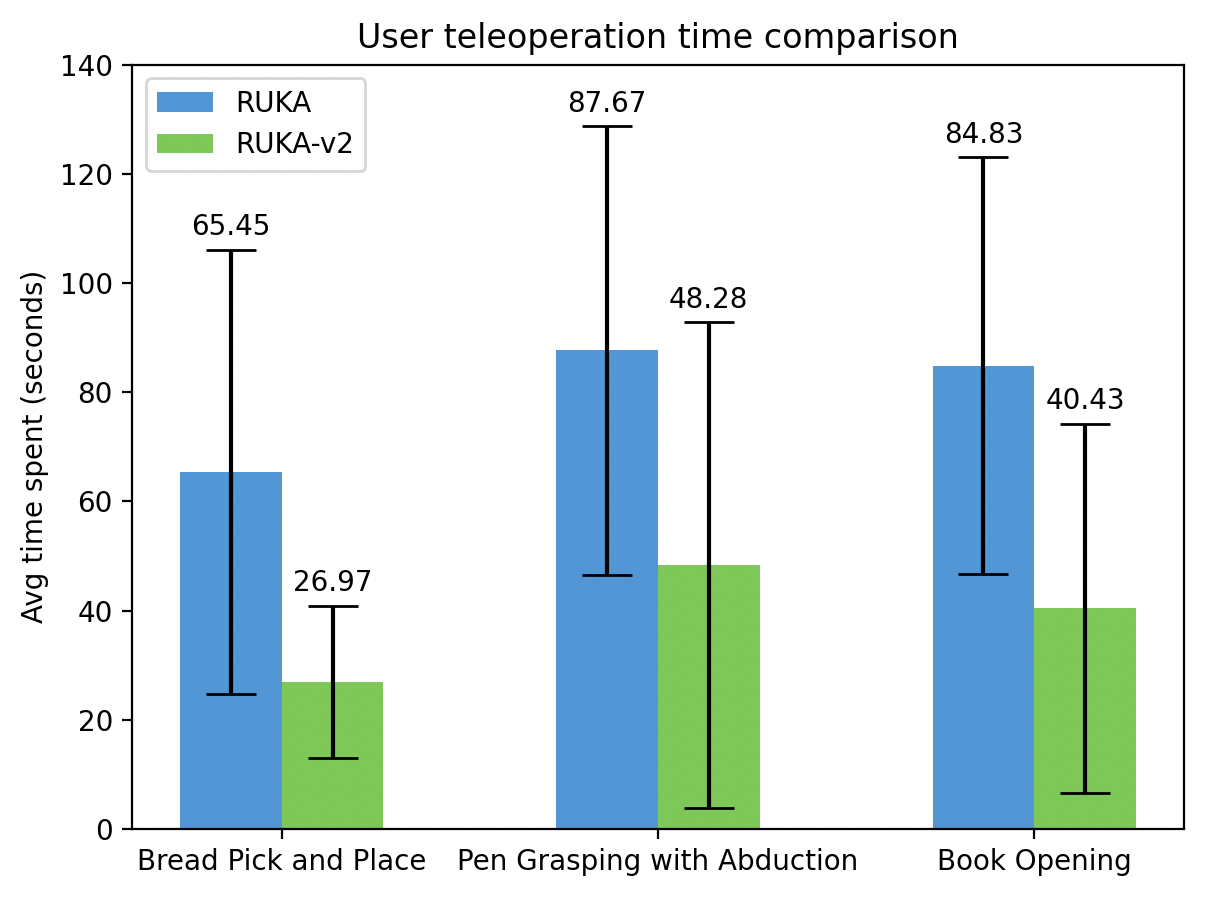
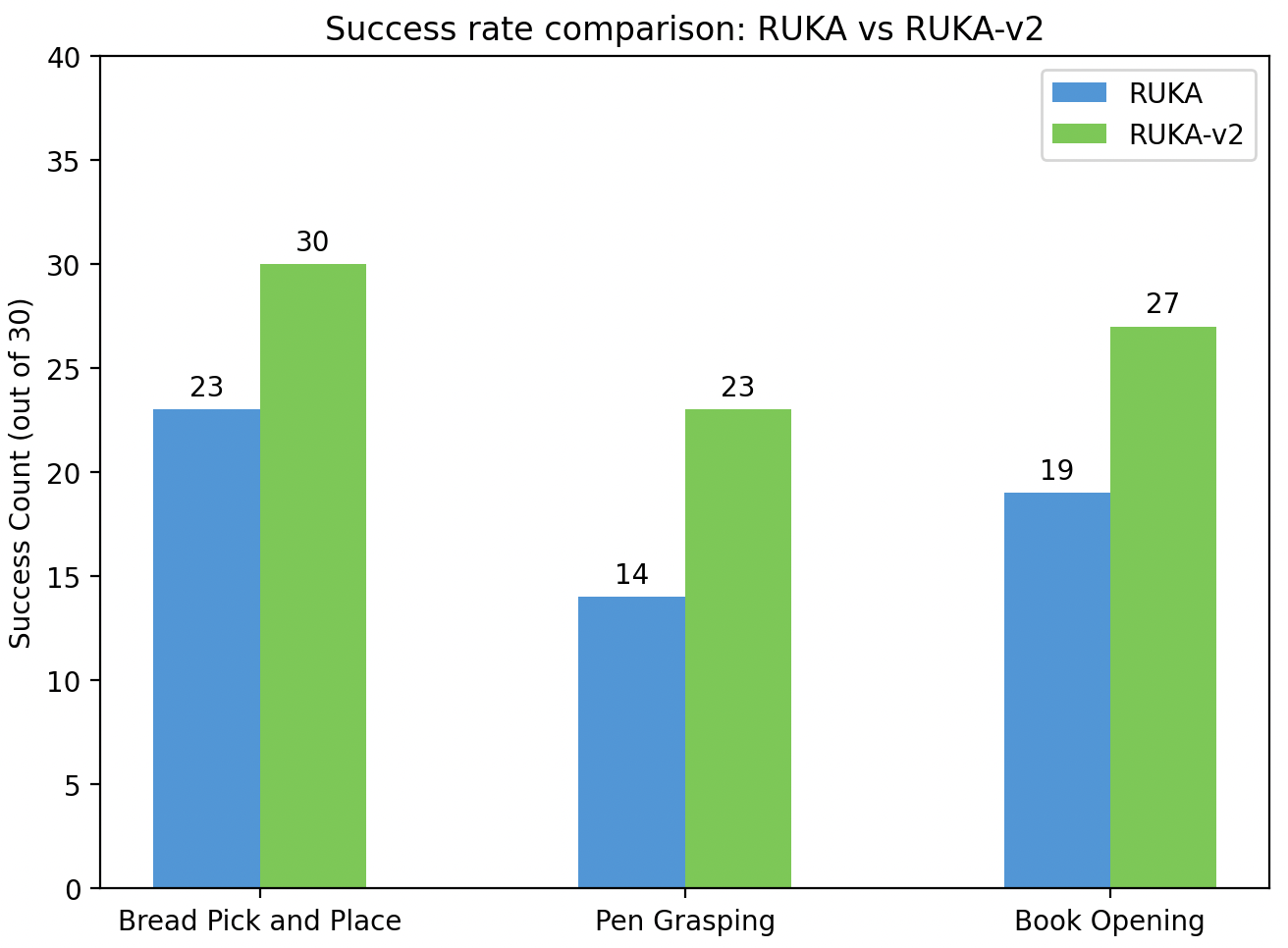
- User study: People teleoperated both the old hand (Ruka v1) and the new one (Ruka‑v2) on tasks like picking up bread, grabbing a pen from a holder, and opening a book cover.
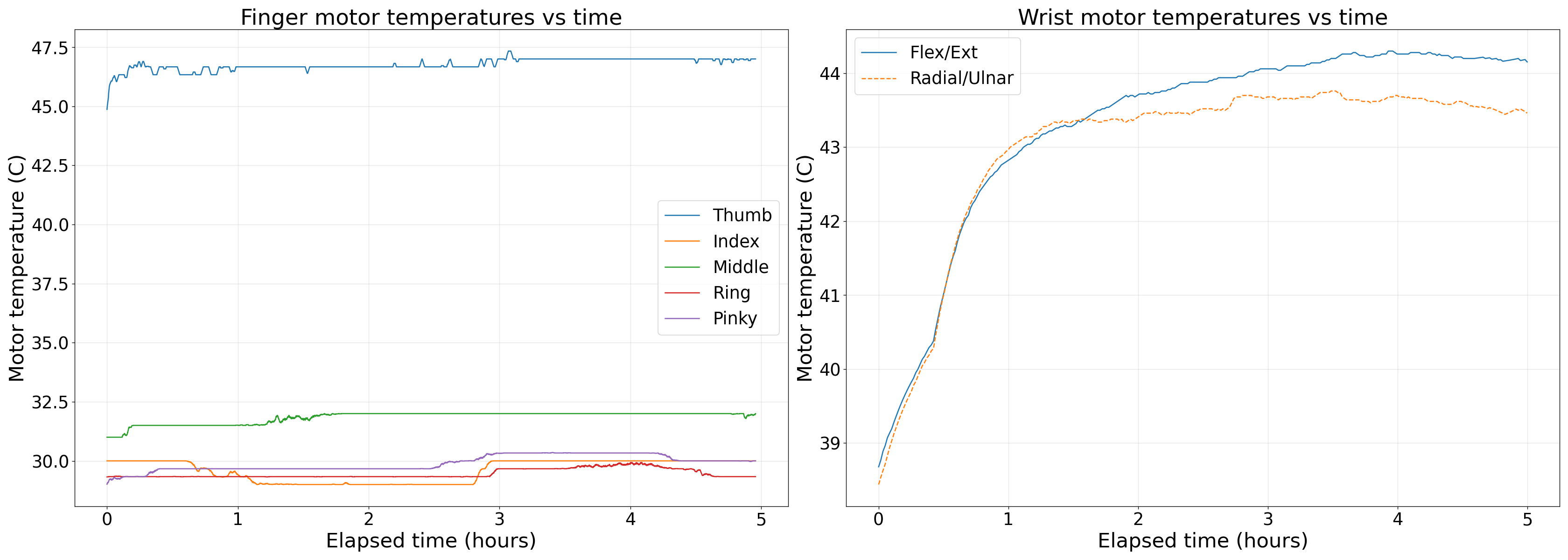
- Long‑run heat test: They ran the hand for 5 hours straight to see if motors overheated.
- Strength test: They measured how much weight different joints and wrist positions could hold.
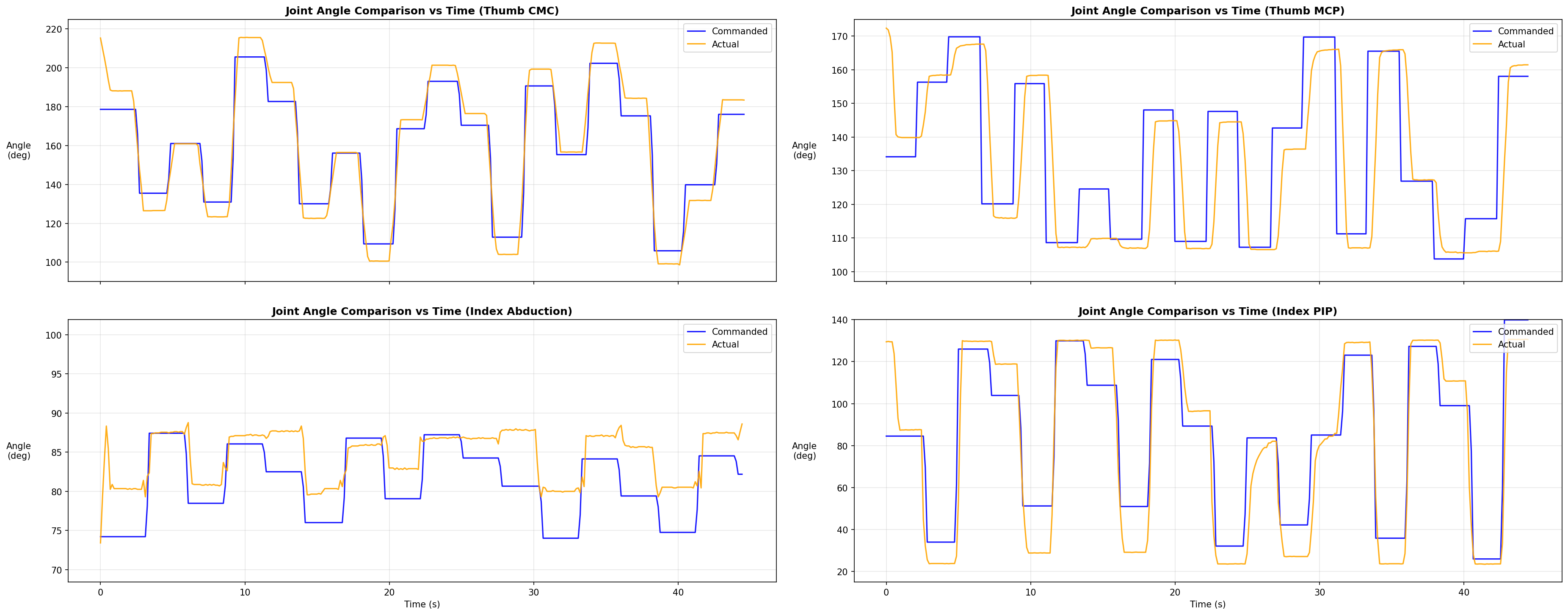
- Control accuracy: With the clip‑on sensors, they checked how close the actual joint angles were to the angles they commanded.
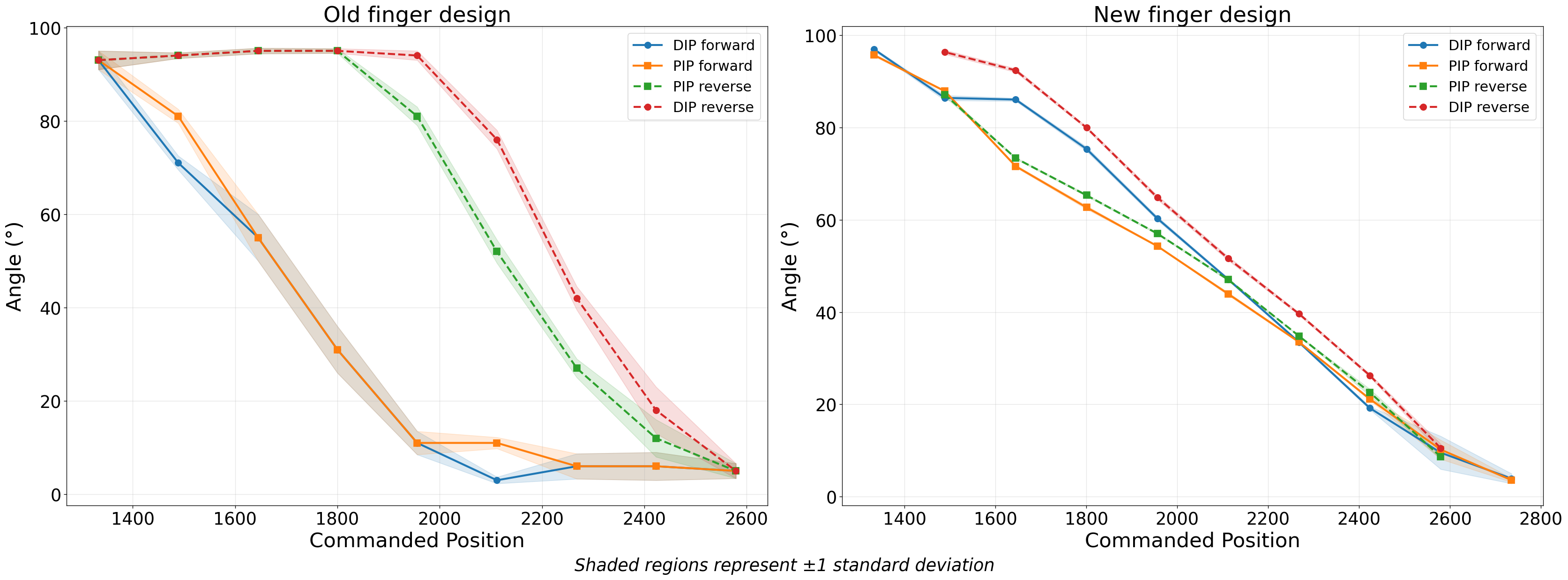
- Finger coupling test: They compared two ways of linking two finger joints (DIP and PIP) to see which gave more repeatable motion.
What did they find, and why does it matter?
Here are the key results:
- Faster and more successful: With the new wrist and finger‑spreading, people finished tasks 51.3% faster and succeeded 21.2% more often than with the previous version.
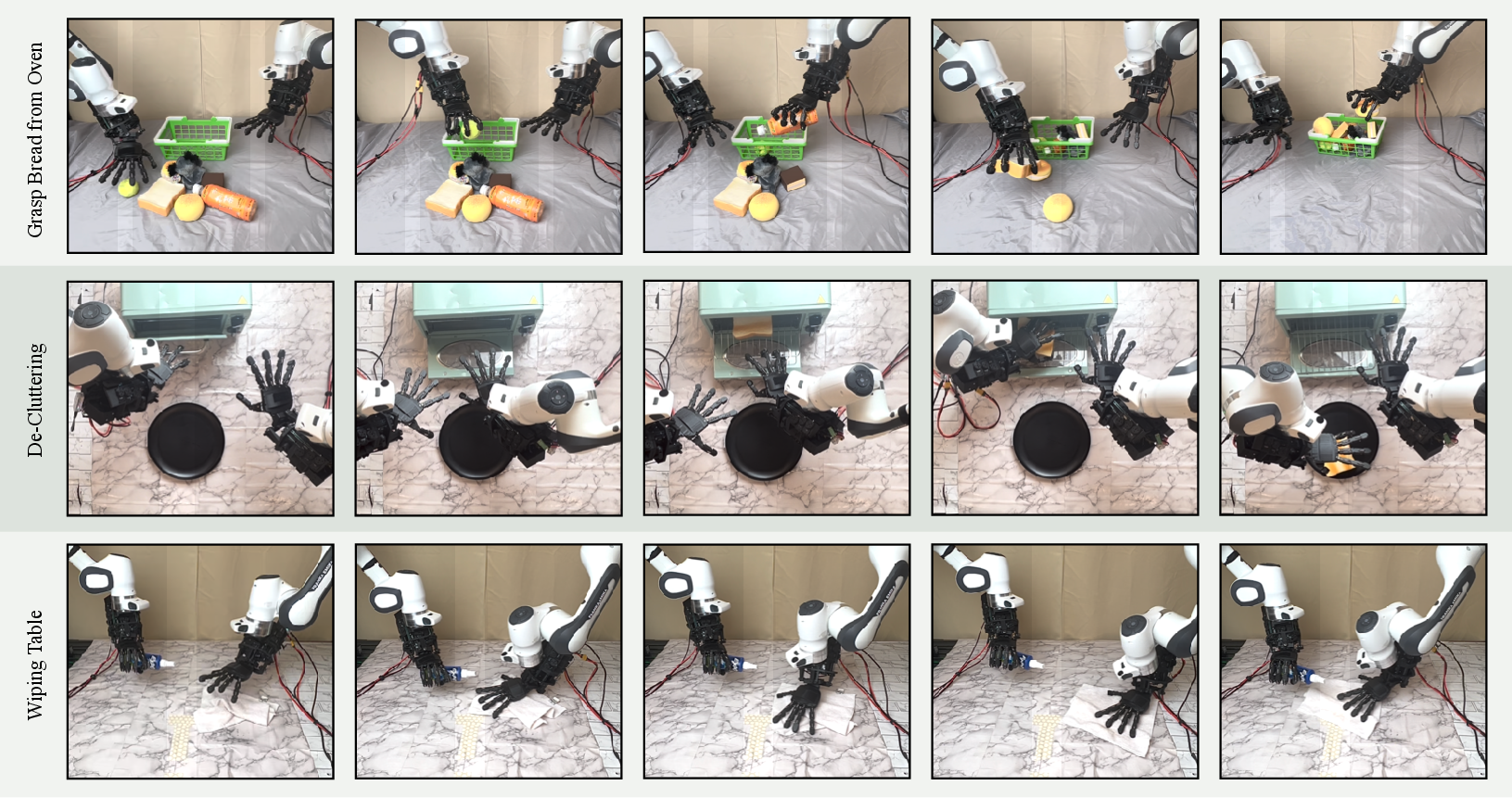
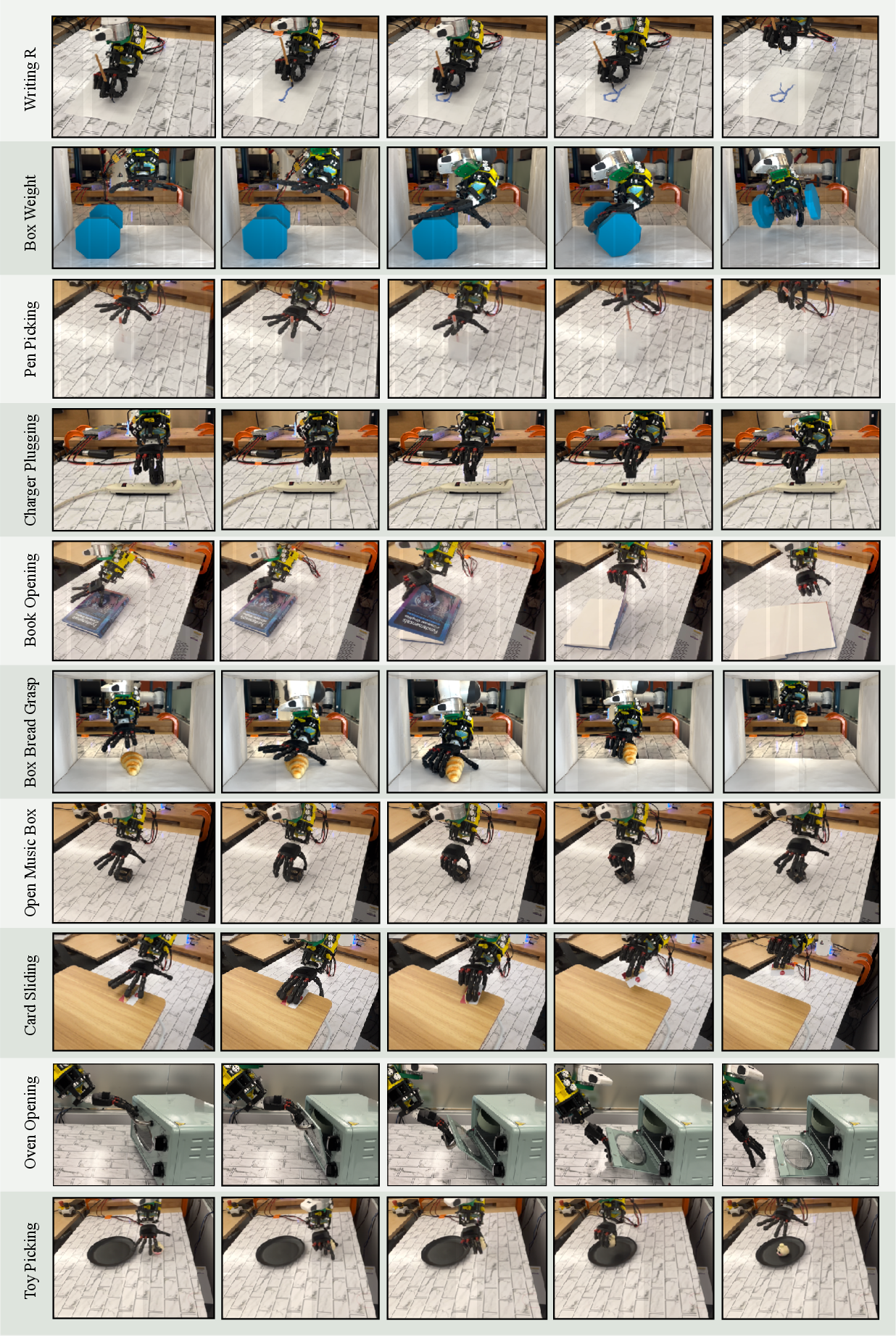
- Works for many tasks: They showed 10 one‑handed tasks and 3 two‑handed tasks by teleoperation, including writing and manipulating objects in tight spaces.
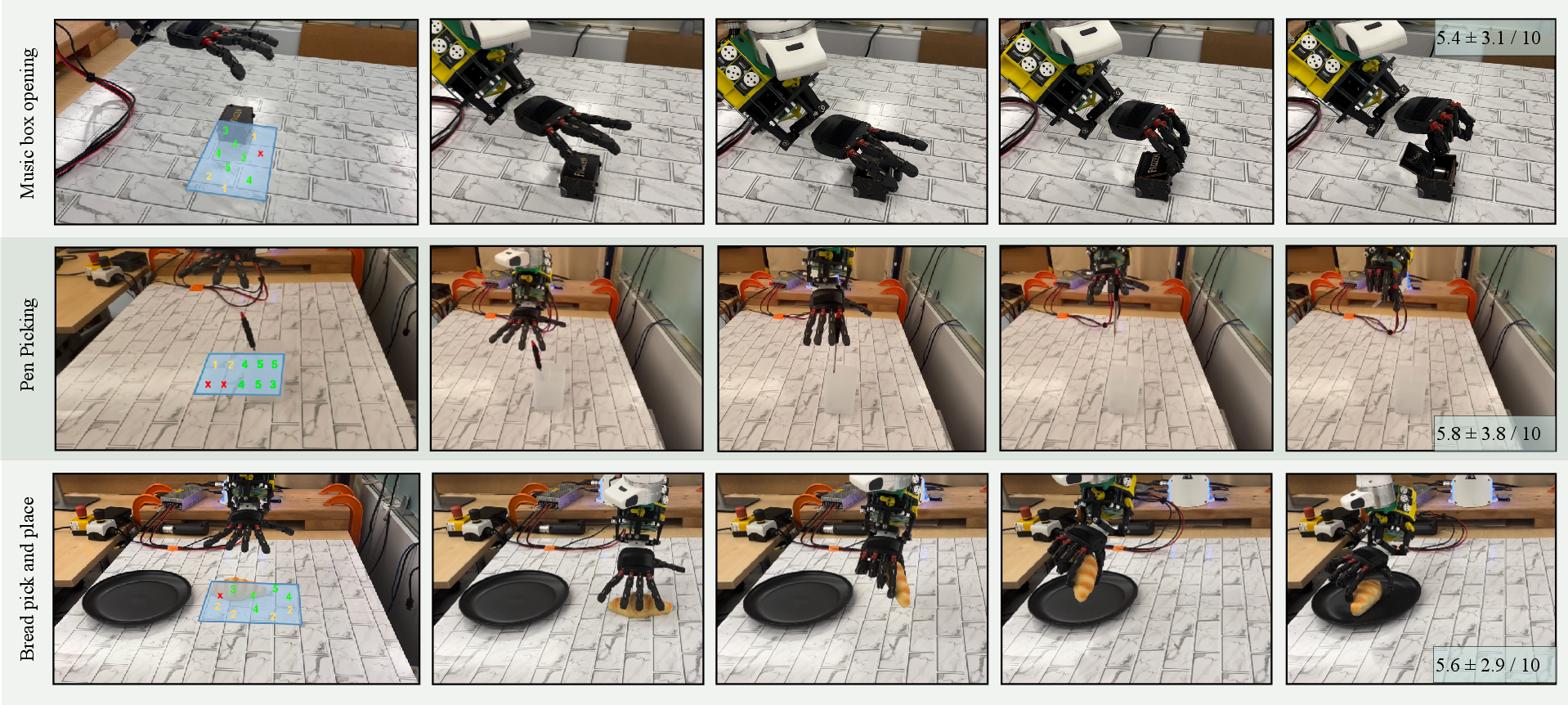
- Learns to do tasks on its own: After training, the hand could perform three tasks (bread pick‑and‑place, opening a music box, and grasping a pen) reliably across different starting spots.
- Runs for hours without overheating: During a 5‑hour test, motors stayed within safe temperatures and didn’t “throttle” or shut down.
- Strong for its size: It could hold over 1.2 kg in some wrist positions and up to about 1.2 kg with certain finger joints. The thumb held around 0.8 kg. Finger‑spreading is weaker (as expected), but still useful.
- Control is reasonably accurate: On average, joints were within about 8.3° (around 11% of their range) of the target, good enough for many tasks, especially given the low cost.
- More consistent finger motion: A new way of linking two finger joints made the motion more repeatable and predictable, which helps both teleoperation and learning.
Why is this important?
- More human‑like motion: Adding a wrist and finger‑spreading makes a big difference for everyday tasks like pinching, sliding, rotating, writing, and reaching into cramped spaces.
- Affordable and open‑source: At under about $1,500 with full build files, code, and videos available, labs, schools, and hobbyists can build, fix, and improve it. That opens the door for more people to do advanced robot hand research.
- Easier to measure and control: Clip‑on sensors and a simple calibration process make it practical to get accurate joint readings and tune the hand without fancy gear.
- A better platform for learning: Because it’s capable and consistent, Ruka‑v2 is a solid test bed for training robots to do complex manipulation.
In short, Ruka‑v2 brings human‑like abilities—wrist motion and finger‑spreading—to an inexpensive, open‑source robot hand. It performs better in real tasks, runs reliably for long periods, and provides the tools researchers and students need to control it and teach it new skills.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a concise, actionable list of what remains missing, uncertain, or unexplored in the paper.
- Wrist range-of-motion shortfall: flexion/extension reported at 45°/30° (below human 80–90°/70°). Quantify task impact (e.g., pouring, door-handle operations) and explore design changes to reach human-level ROM.
- Abduction/adduction actuation is unilateral: adduction is motor-driven while abduction relies on a spring. Characterize limitations where active outward lateral force is needed (torque output, bandwidth, controllability), and evaluate a bidirectional actuation alternative.
- No joint torque/force or bandwidth specifications: report per-joint maximum torque, stiffness, speed (max velocity/acceleration), and control bandwidth to enable controller design and fair comparison to other hands.
- Tendon routing through wrist center not quantitatively validated: measure tendon length variation and joint angle error as a function of wrist pose; quantify cross-axis coupling when one wrist DOF moves while the other is locked.
- “Decoupled” wrist claim unverified: experimentally quantify cross-axis interference (e.g., induced motion/force on the orthogonal axis during actuation) and palm translation about the nominal rotation center.
- Linear joint-to-motor mapping limitations: model nonlinearity, hysteresis, and load-dependent effects; compare linear vs piecewise/learned mappings using encoder data across all joints and wrist poses.
- Controller accuracy tested on limited joints/conditions: extend accuracy tests to all fingers and wrist, include dynamic tracking (varied speeds), loaded conditions, different wrist angles, and temperature variation; report latency and closed-loop tracking performance.
- Lack of closed-loop proprioceptive control: integrate the magnetic encoders (and/or tendon tension sensors) for continuous feedback control; benchmark improvements over open-loop linear mapping.
- Magnetic encoder scope and robustness: only index and thumb tested; assess full-hand coverage, sampling rate limits, cross-talk, temperature drift, mounting repeatability, and long-term stability under vibration and impacts.
- Magnet interference with tactile sensing not characterized: quantify interference between e-flesh magnets and magnetic encoders; evaluate mitigation (magnet placement, shielding, calibration compensation) and its effect on tactile fidelity.
- Tactile sensing left unused in control/policies: integrate tactile signals for slip detection, force modulation, and in-hand manipulation; quantify performance gains on contact-rich tasks.
- Thermal endurance not stress-tested: 5-hour test lacked sustained high-torque gripping and challenging ambient conditions. Evaluate under continuous load, higher duty cycles, different ambient temperatures, and enclosed forearm housings.
- No durability/lifetime data: measure cycle life (tendon wear/stretch, joint backlash, bearing and spring fatigue), mean time to failure, and maintenance intervals (retensioning, tendon replacement); report MTTR/MTBF.
- Payload evaluation is static and short: test dynamic payloads (accelerations, impacts), longer hold durations, and safety factors; analyze failure modes and structural limits under real manipulation trajectories.
- DIP/PIP coupling trade-offs unquantified at task level: compare manipulation success, grasp conformability, and object diversity with/without coupling; analyze energy use, wear, and compliance penalties.
- Middle-finger abduction is fixed: quantify the dexterity loss (e.g., precision multi-finger pinches, arch formation) and evaluate adding actuation to the middle finger’s ab/adduction.
- User study limitations: small, single-lab N=10, potential bias, unclear counterbalancing, learning/order effects, and lack of statistical tests. Replicate with larger, diverse cohorts, blinded crossover, and report inferential statistics.
- Bimanual teleoperation lacks metrics: provide success rates, timings, synchronization error, and human workload/cognitive load measures for bimanual tasks; analyze failure cases and role of wrist/abduction.
- Policy learning scope narrow: only 3 tasks, single camera setup, ~100 demos per task. Evaluate generalization to novel objects, backgrounds, lighting; data efficiency; robustness to disturbances; and ablations disabling wrist/abduction to isolate hardware gains. Compare to Ruka v1 for policy-level improvements.
- End-to-end control pipeline latency and rate absent: report sensing-to-actuation latency, control frequency, and their impact on teleoperation and autonomous policies.
- Compatibility with different robot arms untested: assess integration beyond Franka (payload, interface, workspace with side-mount), and quantify the effect of hand mass/inertia on arm performance.
- Hand mass, power consumption, and center-of-mass not reported: provide total system mass distribution, power draw per joint under representative tasks, and implications for mobile platforms and thermal budgeting.
- Environmental robustness untested: evaluate performance under dust, moisture, vibration, and UV exposure; assess e-flesh durability (tear resistance, cleaning, replacement) and adhesion longevity.
- Build reproducibility and inter-build variability unreported: conduct multi-site replication to quantify variations in control accuracy, ROM, calibration time, and success on standard benchmarks; present tolerance guidance for 3D prints and off-the-shelf parts.
- Tendon management over time: characterize slack growth, creep, and slippage; evaluate auto-tensioning strategies and their impact on accuracy and maintenance burden.
- Safety analysis missing: document pinch-point hazards, stall/current limits, emergency stop behavior, and compliance under unexpected contacts; certify safe teleoperation near humans.
- Retargeting fidelity not benchmarked: compare AnyTeleop retargeting to mocap/glove baselines (pose error, repeatability), and measure robustness to occlusions and camera placements.
- Comparative claims not experimentally grounded: beyond a qualitative table, no head-to-head benchmarking vs other hands on standardized tasks, speed/accuracy, or energy; propose a shared benchmark suite.
- Wrist ROM “~” pass status unresolved: define whether reduced flexion/extension is sufficient for targeted task families and whether future designs will prioritize meeting full human ROM.
Practical Applications
Immediate Applications
Below are specific, deployable use cases that can be executed with the current Ruka‑v2 hardware, software stack, and documentation.
- [Industry | Robotics and Automation] VR teleoperation for fine manipulation in constrained spaces
- Use case: Remote operation to open cabinet doors, retrieve objects, flip switches, thread cables, or manipulate thin/slippery items using wrist flexion/extension plus radial/ulnar deviation and finger ab/adduction.
- Workflow: Franka (or similar 6–7 DOF arm) + Ruka‑v2 + OpenTeach + Oculus VR + AnyTeleop retargeting + linear joint-to-motor mapping.
- Dependencies/assumptions: Requires a compatible robot arm and VR setup; payload limits are modest (≤1.2 kg static depending on joint/orientation); wrist flex/extend RoM is smaller than human; operator training needed.
- [Industry | Logistics/Warehouse] Low-volume, long-tail item handling via human-in-the-loop control
- Use case: Exception handling for irregular items that defeat suction grippers (e.g., repackaging returns, opening/closing clamshells, peeling tape, manipulating zipper bags).
- Tools/products: “Dex teleop station” bundle based on the open-source Ruka‑v2 BOM, controller scripts, and calibration pipeline.
- Dependencies/assumptions: Throughput limited by human teleoperators; requires safety procedures for shared spaces; integration with WMS desired but optional.
- [Industry | Manufacturing and QA] Fixtureless manipulation and functional testing
- Use case: Pressing buttons/knobs, rotating dials, sliding latches, inserting/removing small parts or cables for end-of-line testing and validation.
- Workflow: Repeatable joint-space scripts using the calibrated controller; optional encoder attachments to verify motion accuracy (~8.26° avg error).
- Dependencies/assumptions: Requires jigging for pose repeatability; anisotropic load capacity suggests planning poses that align with stronger wrist directions.
- [Academia | Robot Learning] Affordable testbed for dexterous policy research and benchmarks
- Use case: Collect demonstrations and train visuomotor policies for in-hand reorientation, grasping thin objects, or articulated object manipulation.
- Workflow: BAKU policy training with 100+ teleop demos per task; noise injection for recovery behaviors; RGB + 23D proprioception observations; ResNet-18 backbone.
- Dependencies/assumptions: GPU resources for training; task spaces calibrated; linear joint mapping acceptable for many tasks; datasets shareable for community benchmarks.
- [Academia | Mechatronics/Controls] Course labs on tendon-driven design and calibration
- Use case: Undergraduate/graduate labs that cover tendon routing, decoupled wrist kinematics, abduction modules, and controller calibration.
- Tools/products: Fully modifiable CAD; 3D printable parts; step-by-step build docs; attachable magnetic encoder kit for joint-angle ground truth and controller verification.
- Dependencies/assumptions: Access to a standard FDM/SLA 3D printer and off-the-shelf parts; instructor time for assembly supervision.
- [Academia & Industry | Sensing] Low-cost joint sensing and calibration with attachable magnetic encoders
- Use case: Rapidly instrument tendon-driven joints for angle tracking, joint limit detection, and per-joint calibration without external mocap gloves.
- Tools/products: AS5600-based encoder modules with ESP32 QTPy/I2C multiplexer; reusable across Ruka and other tendon hands.
- Dependencies/assumptions: Magnetic interference must be considered if adding tactile magnets; mounting requires minor assembly.
- [Healthcare | Assistive Robotics Research] ADL task exploration in labs
- Use case: Prototyping of household assistance skills—book opening, pen grasping, cabinet operation, opening small containers—via teleop or learned policies.
- Workflow: Teleop data collection + imitation learning; soft e‑flesh fingertips to reduce damage risk.
- Dependencies/assumptions: Not a clinical device; requires a mobile base or arm in a home-like testbed; safety and reliability validation needed for human-facing deployment.
- [Education & Outreach] Hands-on robotics kits and demos
- Use case: Student-built hands for demos (calligraphy, in-hand rotation, splaying fingers), hackathons, and competitions.
- Tools/products: Ruka‑v2 build kit as a course project; scripts for teleop and simple autonomous routines.
- Dependencies/assumptions: Budget for BOM (~$1.5K per hand, excluding robot arm); lab supervision; maintenance plan for tendons and spares.
- [Software | Teleoperation and Retargeting] Plug-and-play human-to-robot hand mapping
- Use case: Rapid integration of AnyTeleop retargeting to control Ruka‑v2 without expensive motion-capture gloves.
- Workflow: Camera-based 3D keypoints → vector-based dex retargeting → joint targets → linear motor mapping.
- Dependencies/assumptions: Lighting and camera quality affect keypoints; per-motor auto-calibration script should be run after assembly.
- [Robotics Hardware R&D] Rapid iteration on wrist and ab/adduction modules
- Use case: Research on decoupled parallel wrist mechanisms, tendon routing through wrist center, spring-return ab/adduction, and DIP/PIP coupling trade-offs.
- Tools/products: Modifiable CAD and printable parts; optional rigid DIP/PIP coupling for repeatability vs. compliance comparison.
- Dependencies/assumptions: Access to CAD tools and printers; empirical validation for revised designs; clear documentation of changes for reproducibility.
- [Creative Industries | Media/Arts] Programmatic writing/drawing and gestural performance
- Use case: Installations and demonstrations—calligraphy strokes, sketching, gestural routines—leveraging finger splay and wrist deviation.
- Workflow: Teleop to capture strokes + playback; or learned policy for stylized motions.
- Dependencies/assumptions: Requires suitable fixtures for pens/brushes; limited wrist flex/extend range relative to humans.
- [Safety & Soft Handling] Object-friendly grasping
- Use case: Handling delicate items (e.g., lab glassware, consumer electronics) with soft e‑flesh fingertips and tendon compliance.
- Tools/products: E‑flesh fingertip kit applied directly to printed fingers; optional tactile add-ons (FSR/DTA variants).
- Dependencies/assumptions: If magnetic tactile is added, verify interference with magnetic encoders; fingertip wear will require periodic replacement.
Long-Term Applications
Below are forward-looking opportunities that depend on further research, robustness, scaling, or ecosystem development before broad deployment.
- [Consumer Robotics | Home Service] Autonomous household assistance with dexterous hands
- Opportunity: Daily tasks—laundry folding, kitchen manipulation, opening containers, tidying—in compact, cluttered spaces requiring wrist and finger splay.
- Needed advances: Reliable whole-hand tactile integration, robust long-horizon policies, improved wrist flex/extend range, generalization beyond training layouts, long-term durability.
- Dependencies/assumptions: Safer, stronger arms; affordable mobile bases; comprehensive safety standards for domestic HRC.
- [Industry | Assembly Automation] Agile, fixtureless assembly of small parts
- Opportunity: Cable routing, snap fits, connector mating, spring placements, and in-hand reorientation in low/medium-volume production.
- Needed advances: Higher precision and repeatability (nonlinear joint-to-motor models), tactile/vision fusion, cycle-time optimization, and hardened components for 24/7 duty.
- Dependencies/assumptions: Industrial arm/toolchain integration; IP-rated or cleanroom variants for specific sectors.
- [Telepresence Workforce] Hybrid autonomy + teleop for remote dexterity at scale
- Opportunity: Remote fulfillment exceptions, lab operations (opening boxes, pipetting support, instrument setup), micro-assembly tasks with human oversight.
- Needed advances: Multi-user teleop infrastructure, latency-tolerant control, semi-autonomous shared autonomy, ergonomic operator stations.
- Dependencies/assumptions: Network reliability; operations SOPs; workforce training; cost models for telepresence labor.
- [Healthcare | Prosthetics R&D and Clinical Robotics] Translational design insights
- Opportunity: Using Ruka‑v2 modules (e.g., decoupled wrist, ab/adduction) to inform future prosthetic hands or assistive end-effectors; research platforms for bimanual activities of daily living.
- Needed advances: Wearable actuation, lightweight power systems, human-safe materials, medical compliance; for surgery, sterile, precise, and fully validated implementations.
- Dependencies/assumptions: Clinical trials, regulatory clearance, and ergonomics for prosthetic applications.
- [Agriculture & Food Handling] Delicate, shape-adaptive manipulation
- Opportunity: Picking and grading fragile produce (berries, tomatoes), opening/closing crates, manipulating nets or twine in confined angles.
- Needed advances: Environmental hardening (dust/water), tactile slip detection, robust gripper skins, seasonal robustness, mobile integration.
- Dependencies/assumptions: Outdoor-capable arms and power; perception for unstructured environments.
- [Standards & Benchmarks | Policy and Community] Open, reproducible dexterous manipulation benchmarks
- Opportunity: A widely adopted, low-cost hardware standard for evaluating dexterous RL and teleop methods across labs, enabling comparable metrics and datasets.
- Needed advances: Community-maintained task suites, dataset formats, calibration standards, and leaderboards; funding for shared repositories.
- Dependencies/assumptions: Broad community buy-in; stable versioning of hardware/software.
- [Sensing & Control] Self-calibrating, data-driven joint models for tendon hands
- Opportunity: Replace linear mapping with learned nonlinear models using built-in magnetic encoders for continuous self-calibration and drift compensation.
- Needed advances: On-device learning pipelines, closed-loop state estimation, model-based + learned hybrid control, robust online identification.
- Dependencies/assumptions: Compute on edge or reliable uplink; consistent encoder quality; methods for handling hysteresis and slack over wear.
- [Whole-hand Tactile Integration] Multimodal, interference-aware touch sensing
- Opportunity: Out-of-the-box tactile skins on e‑flesh fingertips and palm for robust grasping, slip detection, and contact-rich tasks.
- Needed advances: Sensor layouts that avoid magnet interference, calibration tools, sensor fusion with vision/proprioception, and open tactile datasets.
- Dependencies/assumptions: Standardized tactile interfaces; noise-robust electronics and shielding.
- [Bimanual Autonomy] Coordinated, learned two-hand skills
- Opportunity: Opening jars, folding garments, threading wires, instrument manipulation requiring coordinated ab/adduction and wrist deviation on both hands.
- Needed advances: Multi-arm control policies, task decomposition, shared workspace safety, perception for inter-hand coordination.
- Dependencies/assumptions: Dual-arm platforms; real-time perception; safe collaboration policies.
- [Commercialization | Product Lines] Developer kits and modular end-effectors
- Opportunity: Turn the open-source design into supported kits (education edition, research edition with encoders/tactile, industrial prototyping edition).
- Needed advances: Supply chain for parts, quality assurance, documentation at scale, optional service/maintenance packages.
- Dependencies/assumptions: Sustainable business model consistent with open-source licensing; community contributions.
- [Regulation & Safety | Policy] Guidelines for dexterous manipulators in human environments
- Opportunity: Inform safety norms for tendon-driven, soft-tipped hands operating near people (pinch hazards, force limits, fail-safes).
- Needed advances: Empirical injury-risk data, standardized tests for fingertip compliance and force thresholds, certification pathways.
- Dependencies/assumptions: Collaboration with standards bodies (ISO, ANSI); testbeds and funding for validation.
- [Education Policy] Broad adoption in curricula and workforce development
- Opportunity: National/regional programs to equip teaching labs with low-cost dexterous hands to build skills in mechatronics, controls, and robot learning.
- Needed advances: Instructor training materials, curriculum frameworks, remote labs, and assessment rubrics.
- Dependencies/assumptions: Education funding; alignment with accreditation outcomes; logistics for kit distribution.
Cross-cutting assumptions and dependencies
- A compatible robot arm and controller (e.g., Franka) is typically required; side-mounted wrist interface eases integration with tabletop manipulators.
- Build and maintenance rely on 3D printing and off-the-shelf components; tendon wear and re-tensioning are routine maintenance items.
- Current linear joint-to-motor mapping yields ~8.26° mean error; accuracy is sufficient for many tasks but can be improved with learned models and encoder feedback.
- Thermal testing shows stable 5-hour operation without throttling under test conditions; heavier duty cycles or different environments may require further validation.
- Tactile add-ons may introduce magnetic interference; sensor layout and shielding must be co-designed with encoders.
- Wrist flexion/extension range is lower than human; many tasks remain feasible due to added radial/ulnar deviation and finger splay, but some motions may need re-planning.
Glossary
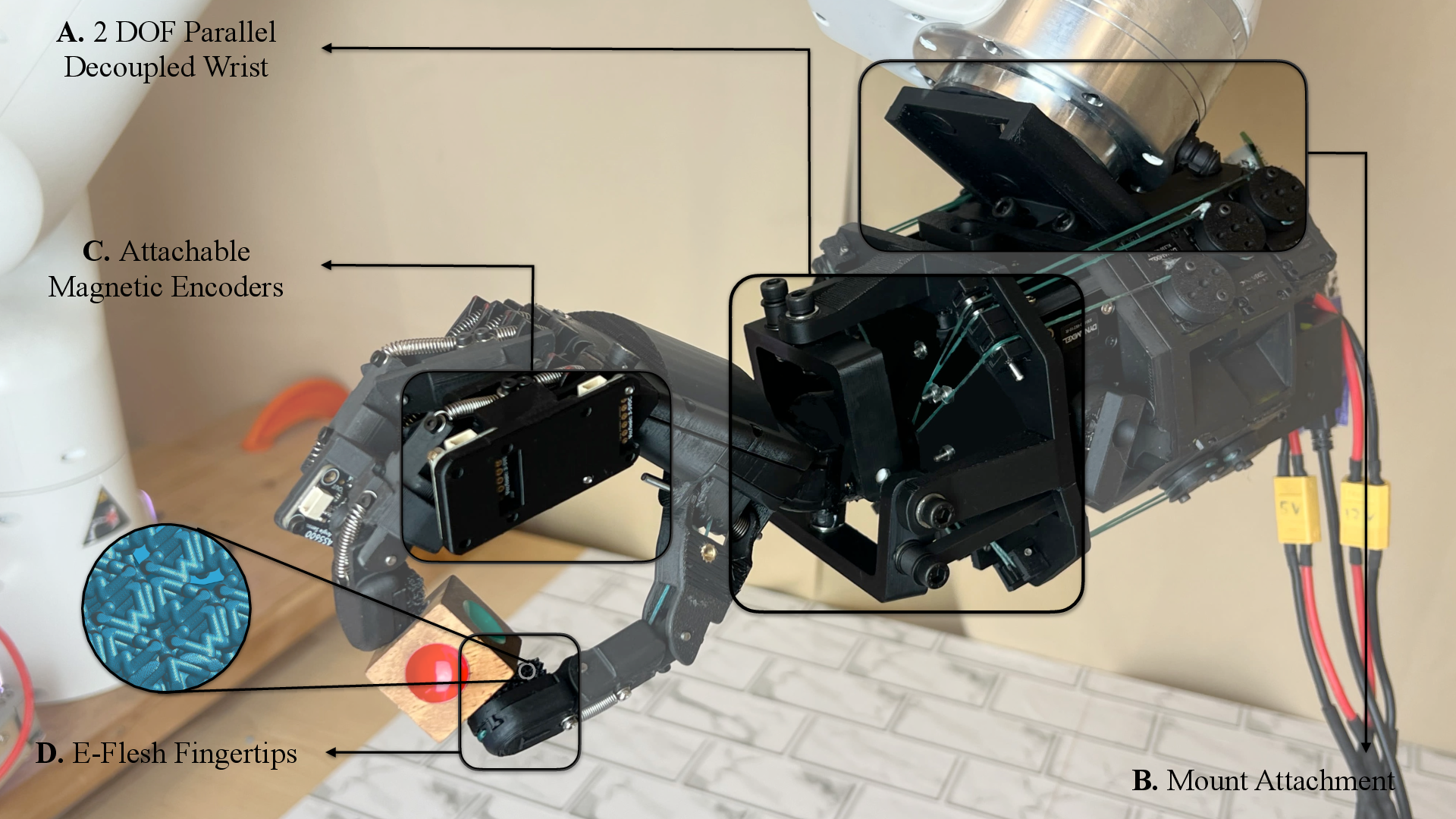
- Abduction/Adduction: Lateral movement of fingers away from (abduction) or toward (adduction) the hand’s midline, enabling grasp width adjustment and in-hand manipulation. "featuring a decoupled 2-DOF parallel wrist and abduction/adduction at the fingers."
- Action-chunking head: A model component that predicts a short sequence (chunk) of future actions from an embedding. "the output embedding corresponding to this action token is passed to an action-chunking head to predict a sequence of future actions."
- Action token: A learned embedding used within a transformer to condition action prediction. "These encoded inputs along with a learned action token are then concatenated and fed into a transformer-based observation trunk"
- Anisotropic mechanical behavior: Direction-dependent mechanical response (stiffness/strength differs by orientation). "The payload differences across configurations also highlight the anisotropic mechanical behavior of the tendon-driven structure"
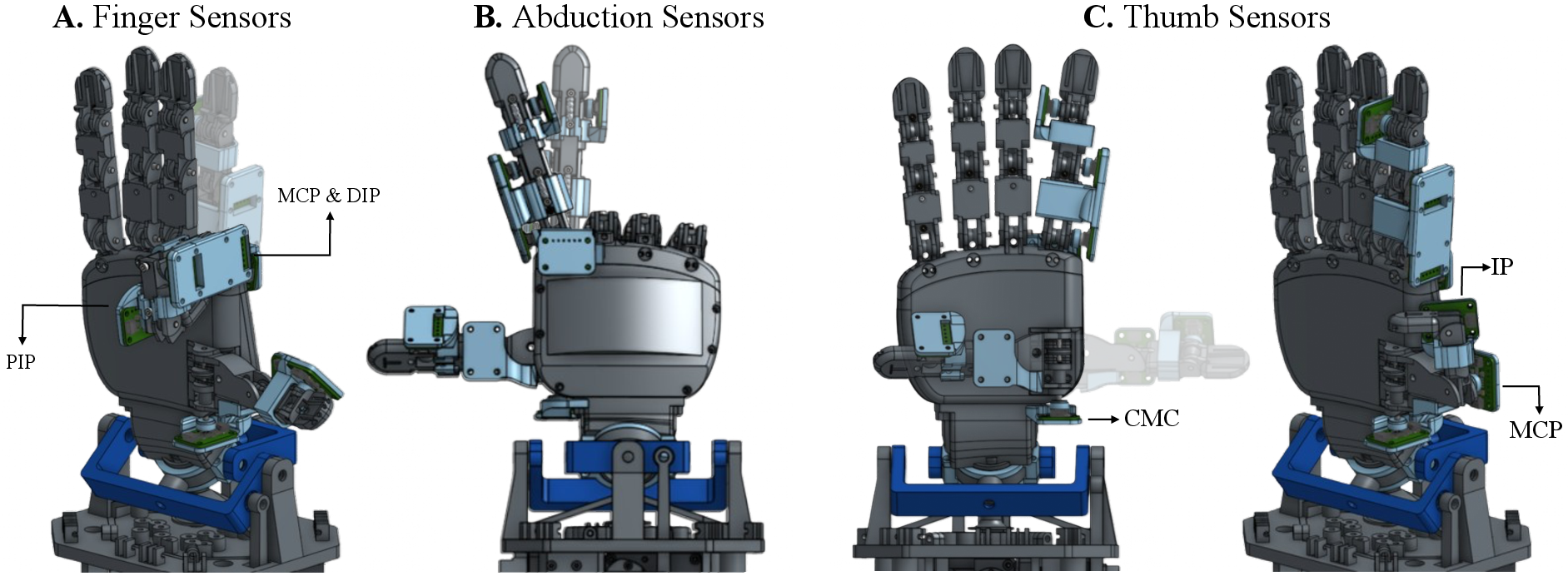
- AS5600 magnetic angle sensors: 12-bit magnet-based rotary position sensors used for joint angle measurement. "The set uses AS5600 magnetic angle sensors, which provide 12-bit resolution to the range of motion."
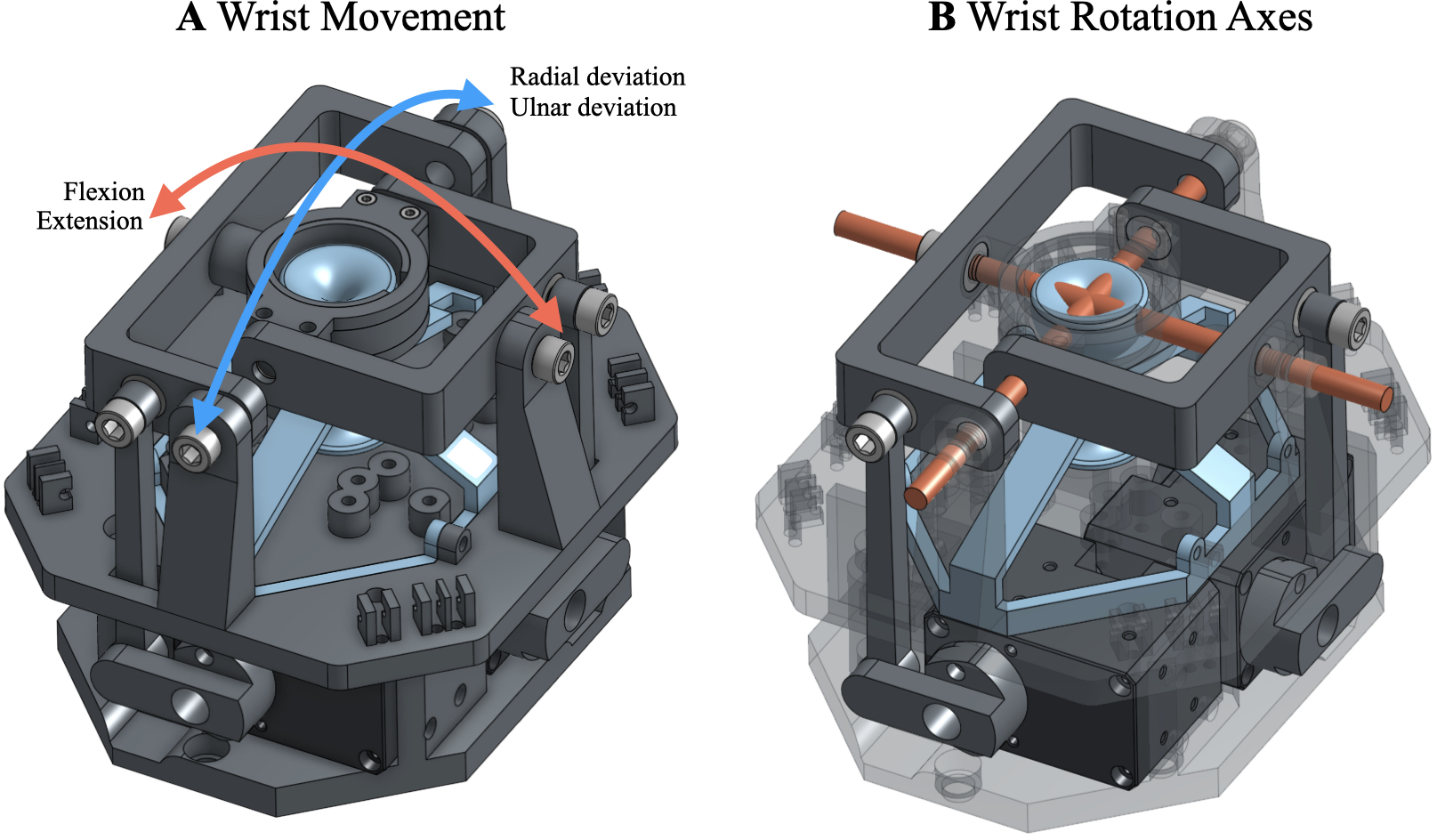
- Ball joint (passive spherical): A joint allowing rotation around a common center in multiple directions without active actuation. "Mechanically, a passive spherical ball joint defines the common center of rotation"
- Bimanual: Involving coordinated use of two hands. "We perform 10 tasks with a single-arm setup and 3 tasks with a bimanual setup."
- Carpometacarpal (CMC): A thumb base joint between the carpal and metacarpal bones, critical for opposition. "and IP, MCP, and CMC joints on the thumb."
- Closed-loop rollouts: Executions where the policy continually observes and reacts to feedback during the trajectory. "At each position, we perform 5 closed-loop rollouts"
- Compliance (passive): Mechanical property allowing a structure to yield under load, improving contact safety and adaptability. "this also introduces passive compliance: under external forces, each joint can deflect independently"
- Coupling (DIP–PIP): Mechanically linking the distal and proximal interphalangeal joints so their motions are synchronized. "optional rigid coupling mechanism as an add-on design, with full instructions, that enforces synchronized PIP/DIP motion"
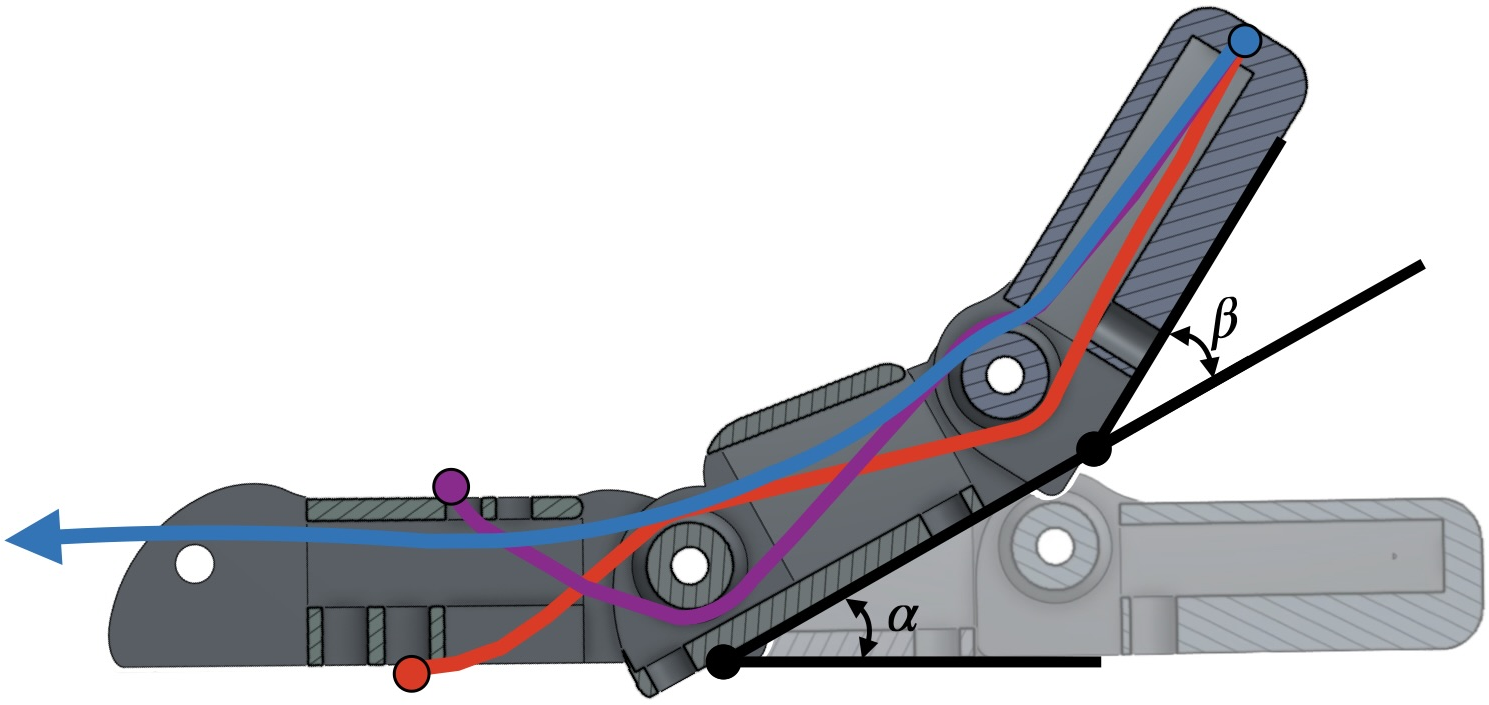
- Decoupled parallel wrist: A wrist mechanism where multiple axes are actuated independently via parallel linkages to reduce cross-axis interference. "we adopt a decoupled parallel wrist mechanism similar to~\cite{dexwrist}"
- Degrees of freedom (DOF): Independent parameters governing a mechanism’s configuration (e.g., joint axes). "possess more than 20 degrees of freedom (DOF)"
- Direct-driven hands: Hands where actuators are mounted directly to joints/links without remote transmission like tendons. "much smaller direct-driven hands have been introduced"
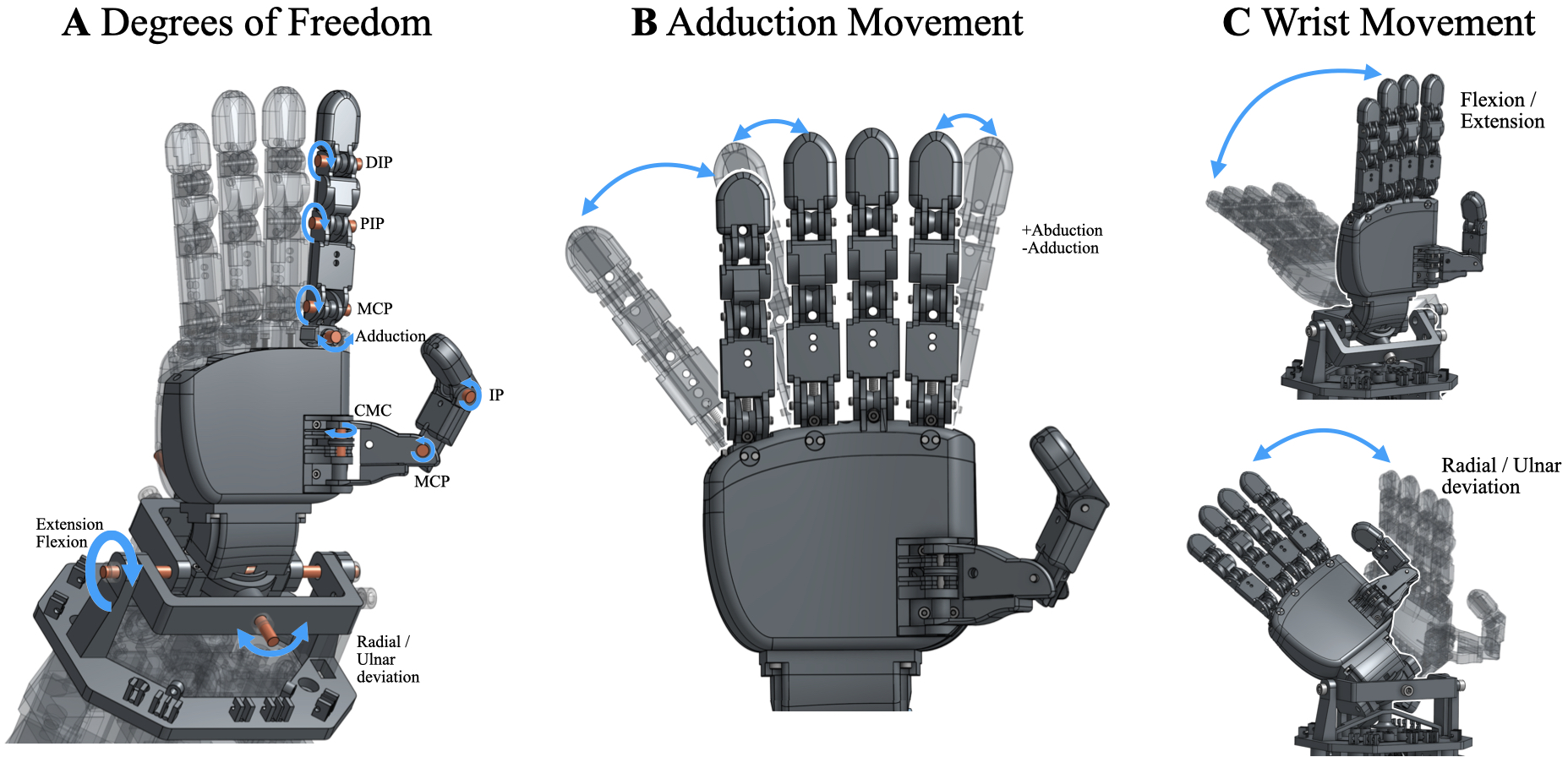
- Distal interphalangeal (DIP): The joint nearest the fingertip, enabling the distal phalanx to flex/extend. "(A) Ruka-v2 features 18 degrees of freedom across the fingers and thumb, with joints at the DIP, PIP, MCP, and Adduction axes on each finger"
- End-effector: The tool or hand at the robot arm’s tip that interacts with the environment. "Wrist trajectories obtained from the Oculus headset are mapped to the Franka arm's end-effector"
- ESP32 QTPy: A compact microcontroller board used here to read sensors and communicate data. "An ESP32 QTPy microcontroller interfaces the sensor readings over an I2C multiplexer board"
- Flexion/Extension: Bending (flexion) and straightening (extension) motions of joints. "The wrist provides flexion/extension and radial/ulnar deviation"
- Forearm pronation: Rotational posture where the forearm turns palm-down. "in both the forearm supination and pronation configurations"
- Forearm supination: Rotational posture where the forearm turns palm-up. "in both the forearm supination and pronation configurations"
- Gaussian noise: Normally distributed random perturbations injected to improve robustness during data collection. "we inject Gaussian noise into the joint states of both the Franka arm and Ruka-v2 during data collection."
- Hysteresis: Path-dependent behavior where response differs for increasing vs. decreasing input due to friction/slack. "The redesigned mechanism exhibits significantly reduced hysteresis and trial-to-trial variation"
- I2C multiplexer: A device that allows multiple I2C sensors to share a bus by switching among them. "An ESP32 QTPy microcontroller interfaces the sensor readings over an I2C multiplexer board"
- Interphalangeal (IP): A thumb joint enabling flexion/extension between phalanges. "and IP, MCP, and CMC joints on the thumb."
- Inverse kinematics: Computing joint configurations that achieve a desired end-effector pose. "using Open Teach's inverse kinematics pipeline"
- Joint-space controller: A controller that commands target joint angles/positions rather than end-effector poses. "we implement a joint-space controller"
- Kinematic chain: A series of connected links and joints describing a limb or mechanism. "the kinematic chain of Ruka-v2"
- Linkages (mechanical): Rigid bars connected by joints to transmit motion/forces in mechanisms. "connected to rectangular linkages that surround it"
- Magnetic encoder: A sensor measuring angular position using a magnet and magnetic field detector. "We designed and developed an attachable magnetic encoder to better detect the joint angle accuracy"
- Metacarpophalangeal (MCP): Finger knuckle joints enabling flexion/extension and, here, abduction/adduction. "(A) Ruka-v2 features 18 degrees of freedom across the fingers and thumb, with joints at the DIP, PIP, MCP, and Adduction axes on each finger"
- Payload: The maximum load a system can carry or manipulate under specified conditions. "We evaluated the payload capability of the hand"
- Proprioception: Internal sensing of the robot’s own state (e.g., joint positions/velocities). "Our observation space includes a 23-dimensional proprioception state"
- Radial/ulnar deviation: Wrist side-to-side motion toward the thumb (radial) or little finger (ulnar). "The wrist provides flexion/extension and radial/ulnar deviation"
- Range of motion (ROM): The extent of movement a joint can achieve, typically measured in degrees. "To best replicate human hand behavior, the hardware must support a range of motion comparable to that of a human hand."
- Retargeting: Mapping human motion to a robot’s kinematics. "We adopt the retargeting module from AnyTeleop"
- ResNet-18: A convolutional neural network architecture used for visual feature extraction. "the RGB input is passed through a ResNet-18~\cite{resnet} visual encoder"
- Teleoperation: Remote control of a robot by a human operator. "We use the Open Teach framework to teleoperate the system with an Oculus VR headset."
- Tendon routing: The path along which tendons (cables) are guided to transmit actuator forces to joints. "A bearing-supported routing plate then redirects tendons outward into the forearm"
- Tendon-driven: An actuation approach where remote motors pull tendons (cables) to move joints. "a fully open-sourced, tendon-driven humanoid hand"
- Thermal throttling: Automatic reduction of performance to prevent overheating. "Wuji Hand thermal throttling observed after 40 minutes of continuous operation in internal testing."
- Transformer-based observation trunk: A transformer module that fuses sensory embeddings for policy inference. "fed into a transformer-based~\cite{vaswani2017attention} observation trunk"
- Wrist kinematics: The study/modeling of wrist joint motions and axes. "2 DOF wrist kinematics."
Collections
Sign up for free to add this paper to one or more collections.