Universal Manipulation Exoskeleton: Learning Compliant Whole-body Policies with Real-time Torque Feedback
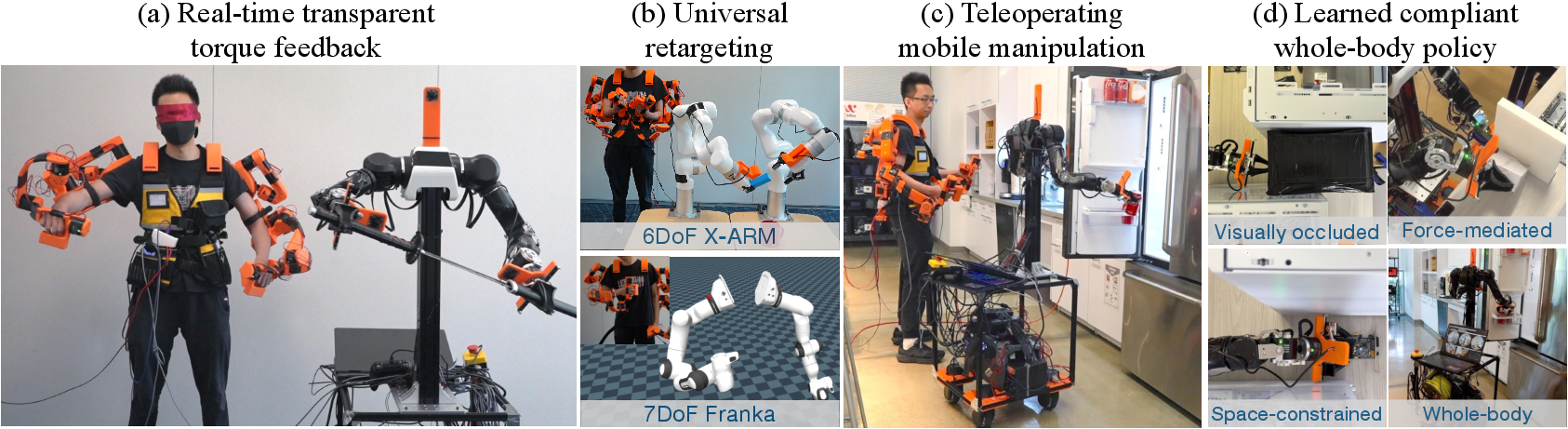
Abstract: For robots to work safely in household environments, they need to be compliant and react to torque and force feedback during contact. However, the majority of existing data collection pipelines still lack the ability to capture force and torque data for learning active compliant policies. In this paper, we present Universal Manipulation Exoskeleton (UME), an upper-limb exoskeleton that provides real-time haptic torque feedback while recording whole-arm configurations and joint torque signals for teleoperation. With transparent torque feedback, human operators can even unsheathe kinematically constrained objects while blindfolded. UME is low-cost, lightweight, and portable. Equipped with an embedded IMU, it enables teleoperation for mobile manipulation. With our proposed universal retargeting algorithm, UME can teleoperate a range of robots, including the 7DoF OpenArm, 7DoF Franka, and 6DoF X-ARM. We demonstrate that this combination of capabilities enables learning bimanual, whole-body, and active compliant policies that operate effectively in highly constrained spaces. The learned robust autonomous policies achieve high success rates across a variety of tasks, including long-horizon mobile manipulation, force-mediated box flipping, visually occluded box pushing, and space-constrained tabletop manipulation. Videos, code, and additional information can be found at https://ume-exo.github.io.


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper introduces a wearable device called the Universal Manipulation Exoskeleton (UME). When a person wears UME, they can control a robot with their arms, and they can actually feel what the robot feels in real time. That “feeling” (called haptic torque feedback) tells the person how hard the robot is pushing or twisting on things. The goal is to teach robots to be careful, gentle, and smart when touching objects—especially in tight spaces or when strong forces are involved—so they can safely work in homes and offices.
What questions did the researchers ask?
In simple terms, the team wanted to know:
- Can we give human operators a clear, real-time sense of the forces the robot feels, so teleoperation is safer and more intuitive?
- Can we record the whole arm’s motion (not just the hand’s position) to help robots learn to move their entire arm correctly in tight spaces?
- Can this system work with different kinds of robot arms and even with a robot base that moves around?
- If we train robots using the data collected with UME, will they learn better, more “compliant” (gentle and adaptive) behaviors for tricky tasks?
How did they do it?
The approach has four main parts:
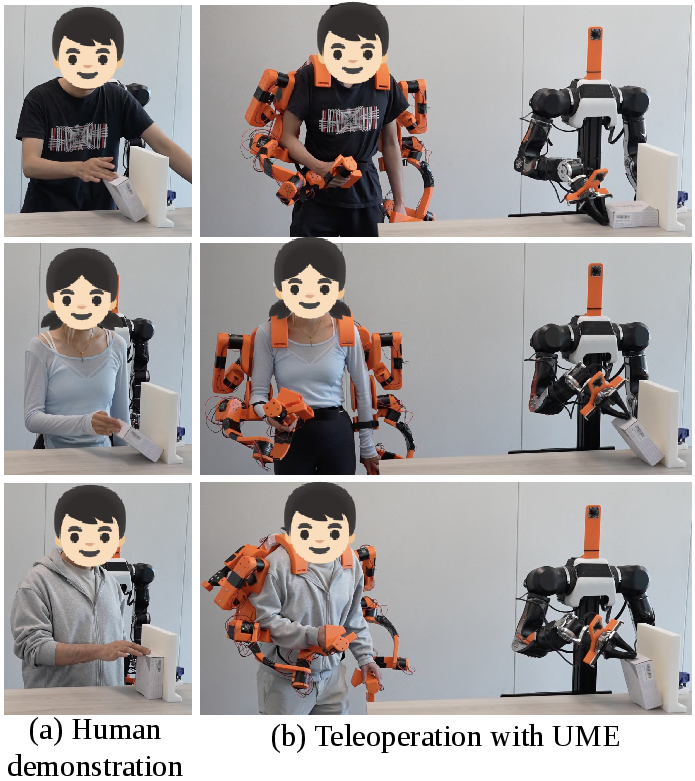
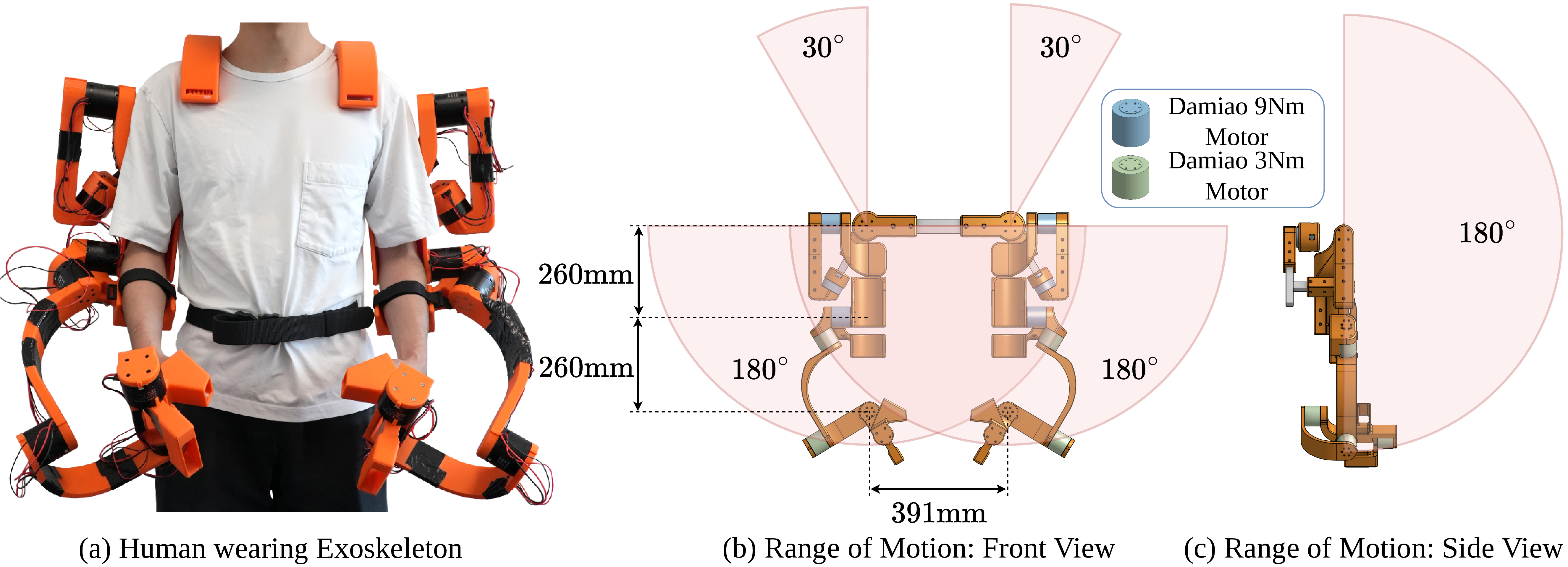
1) A wearable exoskeleton that mirrors your arm
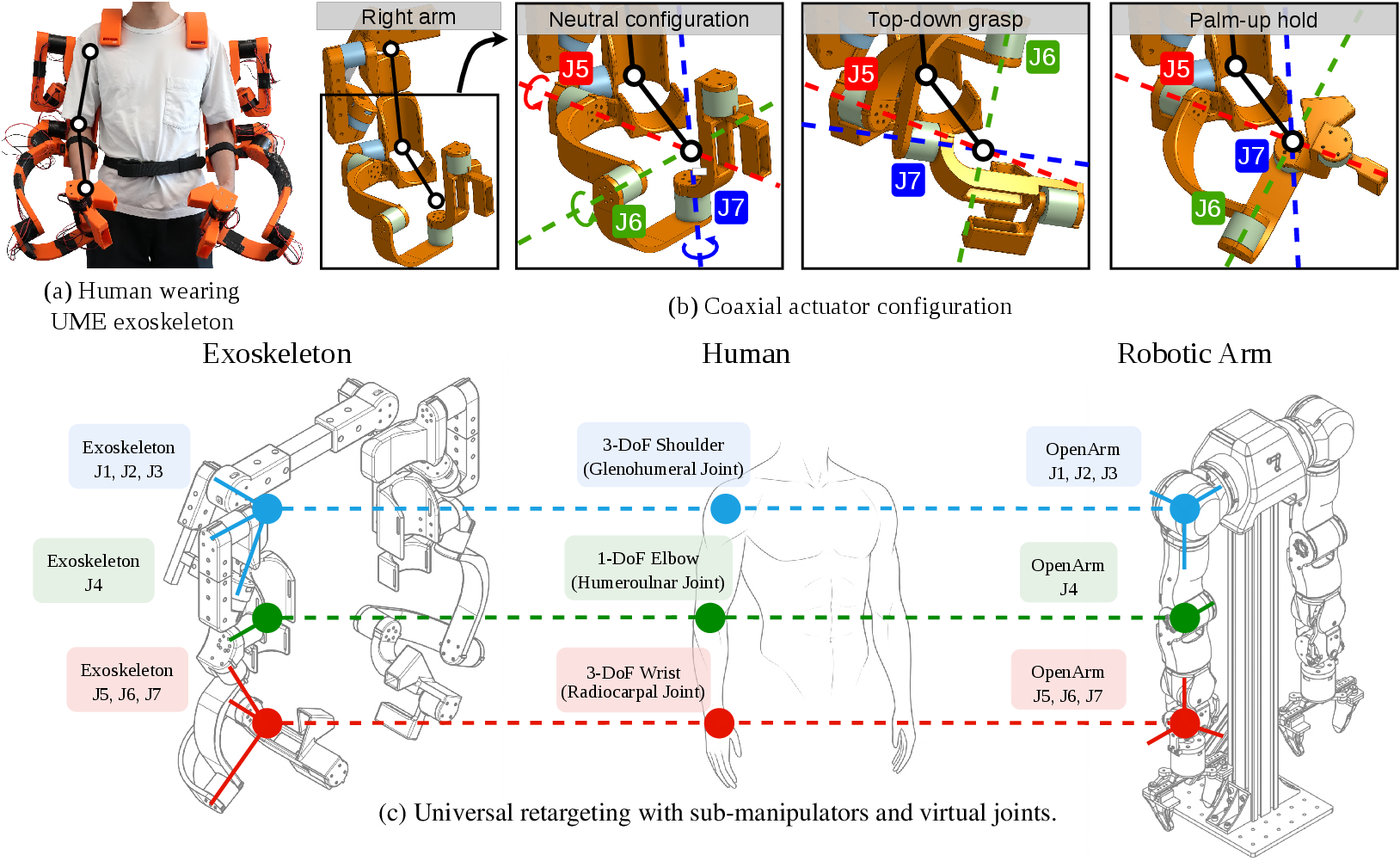
- UME is like a light robotic sleeve for your upper arm. It matches how a human shoulder, elbow, and wrist move.
- “Torque” is a twisting force. “Haptic torque feedback” means the exoskeleton pushes back on you just enough so you can feel the resistance the robot is sensing. For example, if the robot’s hand is pressing into a wall, you feel that pressure in your exoskeleton.
- The motors are chosen so they’re “backdrivable,” meaning they can move smoothly when pushed and accurately transmit the feeling of forces.
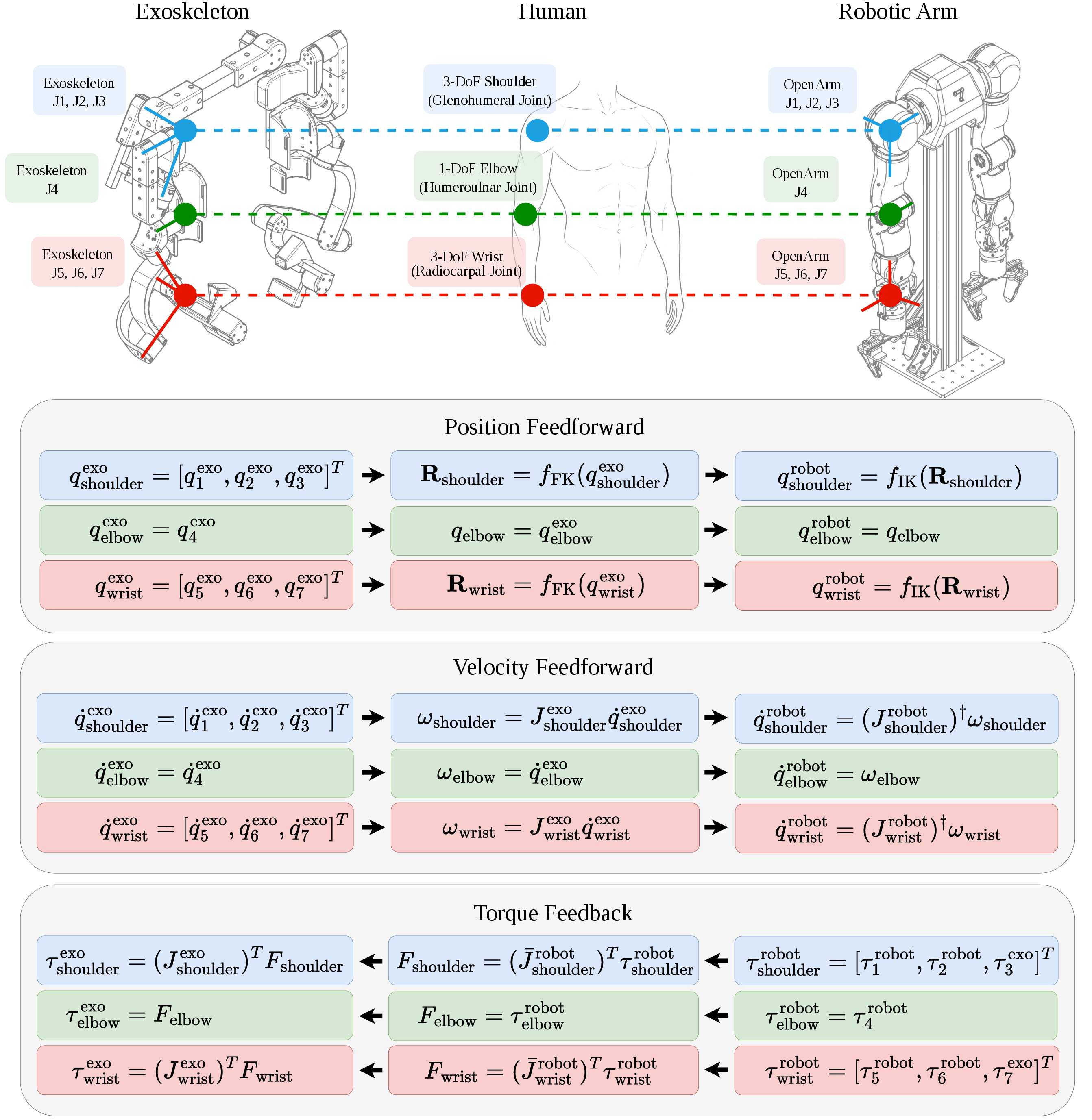
2) A universal “retargeting” algorithm
- Different robots have different joints and ways of moving. The team created a way to translate your shoulder, elbow, and wrist movements into any robot’s shoulder, elbow, and wrist motions.
- Think of it like mapping your arm’s motion into three parts—shoulder, elbow, wrist—and sending each part to the robot’s matching part. This keeps control stable and avoids confusing situations that can happen when controlling only the robot’s hand position in 3D.
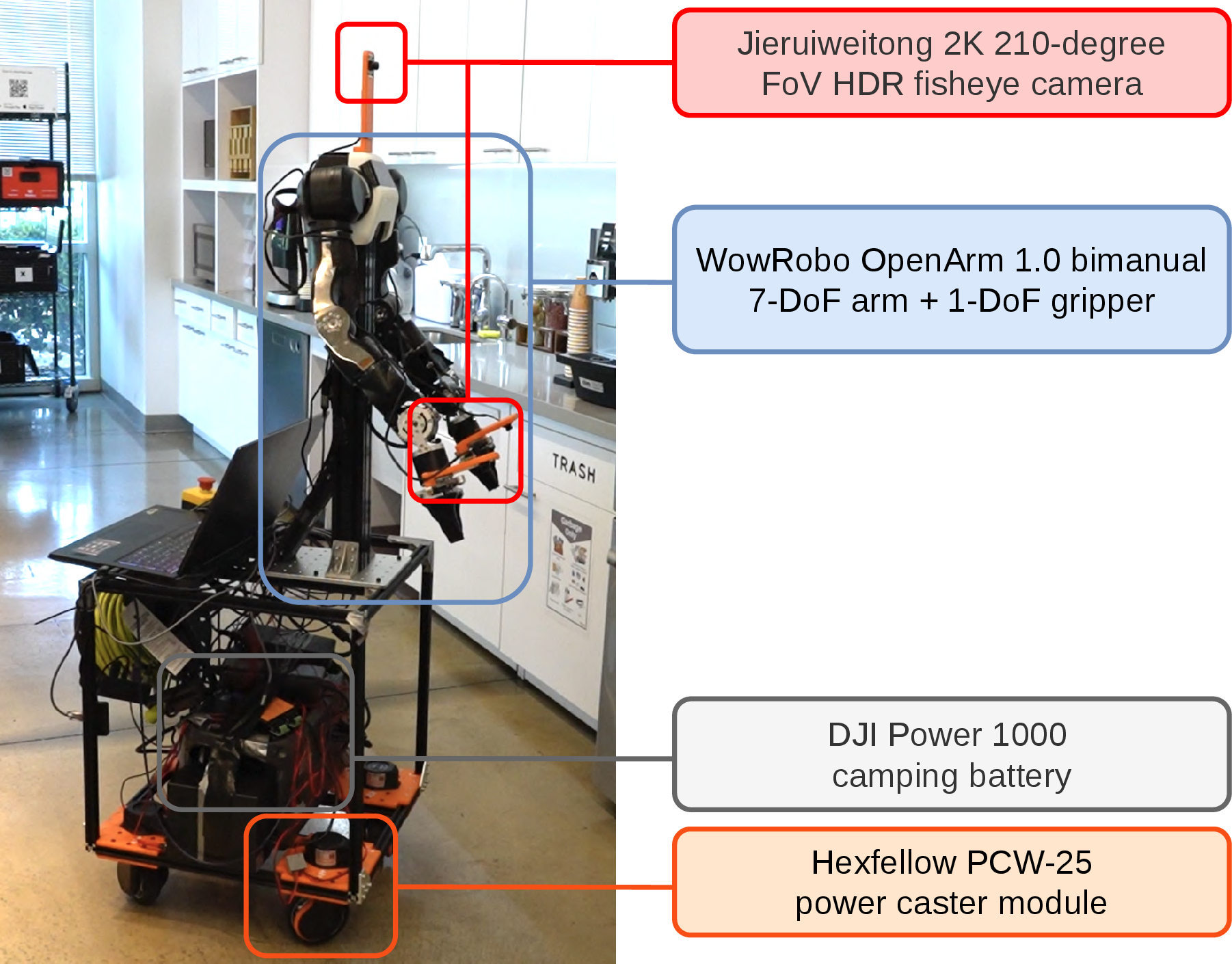
3) Mobile base control with a tiny sensor
- UME includes a small, low-cost motion sensor (an IMU). By slightly turning your upper body, you can drive the robot’s base (its wheeled platform) forward, sideways, or rotate it. This lets you do “whole-body” tasks, like opening a fridge and then moving to a table.
4) Teaching robots using the collected data
- While teleoperating, the system records images (what the camera sees), the robot’s joint positions (how bent or straight each joint is), and joint torques (how much force the joints feel).
- The team trains a machine learning model (a Transformer-based policy, similar to those used in LLMs but adapted for actions) to predict the next motions the robot should take. Crucially, they include torque data so the robot learns when to push gently or firmly—this is what “compliance” means.
What did they find, and why is it important?
They tested four real tasks that need careful force control, whole-arm motion, and sometimes moving the base:
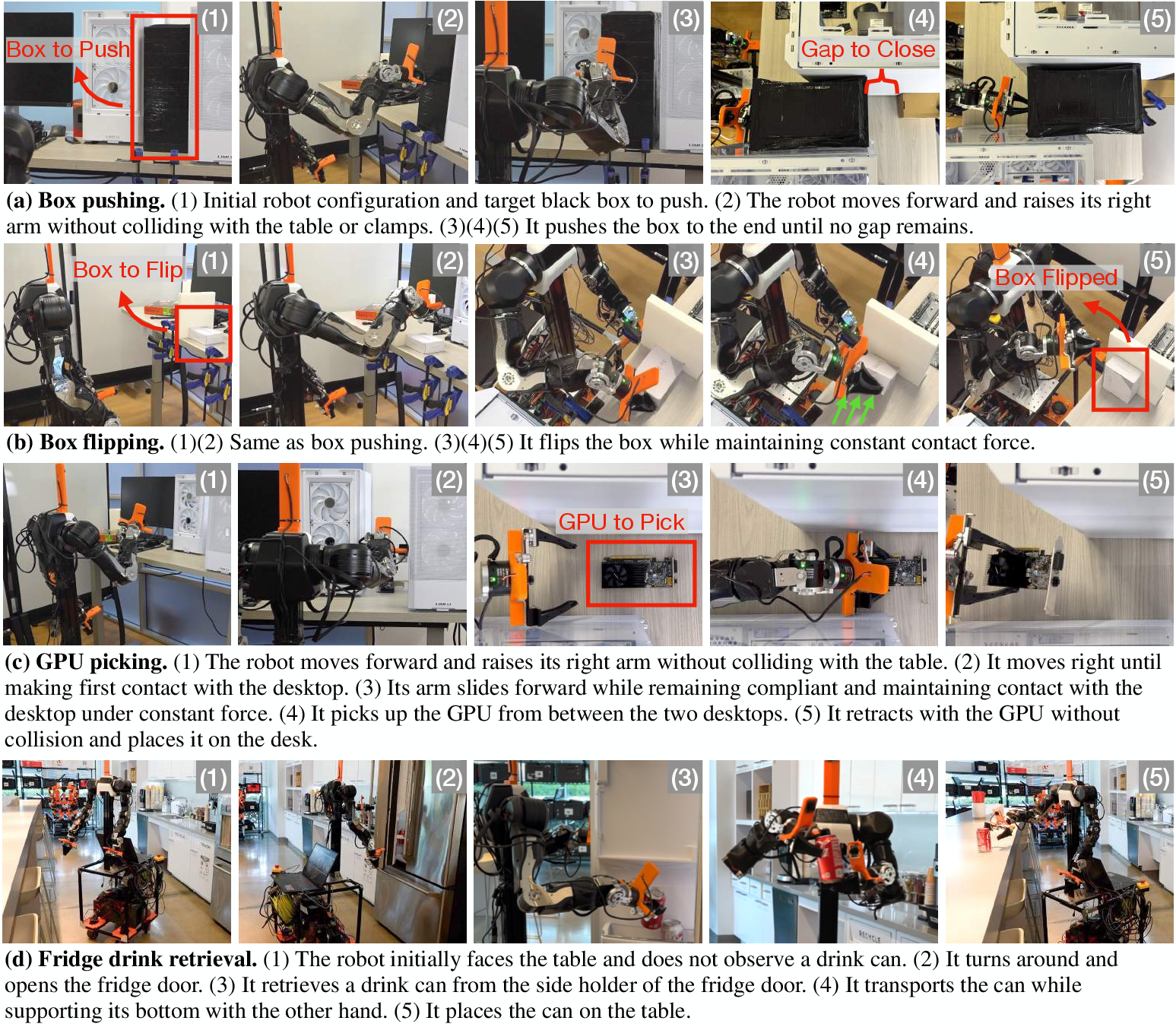
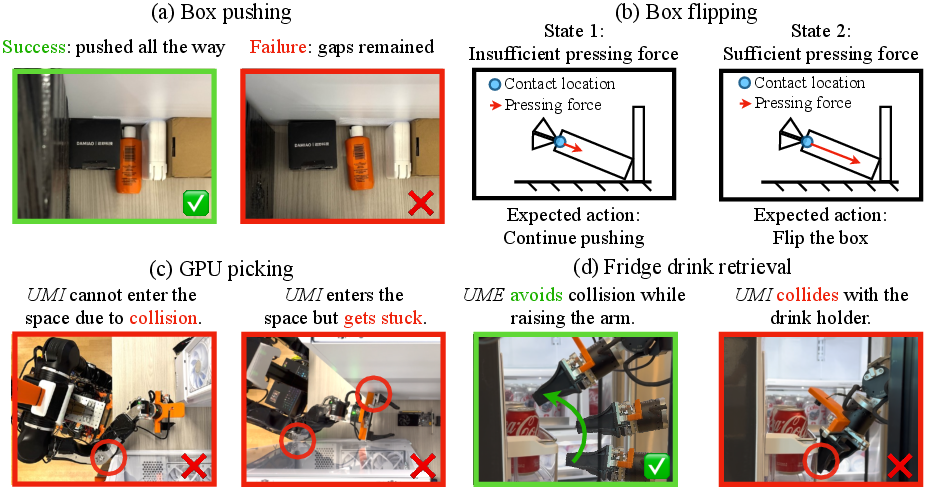
- Box pushing: Push a large box into a tight spot against hidden objects. The robot must use force feedback to know when there’s no gap left.
- Box flipping: Press a box against a wall and flip it upright while keeping steady pressure so it doesn’t slip.
- GPU picking: Slide a gripper between two desktops with only about 5 mm of clearance, then carefully retrieve a computer GPU card.
- Fridge drink retrieval: Turn around, open a heavy fridge door, grab a drink from the door holder, and place it on a table—coordinating both arms and base movement over a long sequence.
To make the results easy to understand, here’s what happened:
- Using UME’s full data (vision + whole-arm positions + torques), the learned robot policies succeeded most of the time:
- Box pushing: 90% success
- Box flipping: 85% success
- GPU picking: 95% success
- Fridge drink retrieval: 95% success
- Without torque data (so the robot can’t “feel” forces), performance dropped, especially on tasks that depend on pressure and contact:
- Box flipping fell to 0% success
- Box pushing dropped to 50% success
- Using only the robot hand’s position (like other systems that don’t record full arm motion), performance was poor in cluttered spaces:
- GPU picking was 0% (it kept colliding instead of sliding carefully)
- Fridge drink retrieval also failed to reliably grasp and remove the drink
Other highlights:
- Teleoperation with torque feedback was faster to collect training data—about 3.3× more demonstrations per minute than without feedback (about 71% of human speed on a force-heavy task).
- UME worked across different robot arms (e.g., X-ARM, Franka) and supported bimanual tasks (using two arms) and mobile manipulation (moving the base).
Why this matters:
- Feeling what the robot feels makes teaching safer and more natural.
- Recording full-arm poses helps robots learn how to avoid bumping into things in tight spaces.
- Including torque in training teaches robots to be gentle and adjust force automatically—key for home use.
What is the potential impact?
If robots are going to work in homes and offices, they must be safe, gentle, and good at handling contact—like a person sliding an object along a shelf or holding a door while grabbing something. This work shows a practical path to teach those skills:
- Better safety: Real-time force feedback helps the operator avoid breaking or over-pressing objects during teleoperation and helps the trained robot do the same autonomously.
- More capable robots: Learning whole-arm compliant behavior lets robots handle messy, tight, or hidden spaces—common in real life.
- Wider compatibility: The universal retargeting makes it easier to use the same teaching system with many different robot arms.
- Lower cost and portability: A lightweight exoskeleton with an inexpensive sensor could help more labs and companies collect high-quality training data.
Limitations and future directions
- The current exoskeleton uses 3D-printed plastic parts (PLA), which adds weight and limits payload compared to metal versions. A lighter, adjustable, more durable version would improve comfort and performance.
- The link lengths are fixed; adjustable sizing would fit more users better.
- Franka arm testing was only in simulation due to hardware delays. Real-world tests are planned and may perform even better thanks to Franka’s accurate torque sensing.
In short, UME makes it easier to teach robots how to feel and adapt, which is a big step toward safe, helpful robots in everyday environments.
Knowledge Gaps
Unresolved knowledge gaps, limitations, and open questions
Below is a single, consolidated list of what remains missing, uncertain, or unexplored in the paper, phrased to be concrete and actionable for follow‑up work.
- Haptic transparency and latency are not quantified: measure end‑to‑end loop delay, torque reflection fidelity (e.g., Z‑width, frequency response), and maximum stable feedback gains under realistic contact scenarios.
- Stability guarantees for human-in-the-loop haptic feedback are absent: analyze passivity/energy injection with model errors and delays; evaluate passivity observers/energy tanks to ensure stable teleoperation across embodiments.
- Torque sensing fidelity on follower robots is unclear: characterize accuracy/noise/drift of joint‑torque estimates (e.g., current-based vs. true torque sensors), and their impact on both teleoperation and learned policy performance.
- Cross‑embodiment generality is only partially demonstrated: validate the “universal retargeting” on more real robots beyond OpenArm and X‑ARM (e.g., Franka real hardware, different kinematic layouts, gearings, and link inertias).
- Retargeting under kinematic mismatch and constraints is not fully addressed: test robustness to joint limits, different arm link lengths, axes misalignments, and redundancy resolution; formalize conditions under which the sub‑manipulator decomposition avoids singularities/ill-conditioning.
- Closed-chain and inter-arm constraints are unsupported: develop retargeting/control for tasks that require rigid bimanual constraints (e.g., carrying a rigid object with both arms) and evaluate stability/accuracy.
- Calibration robustness is untested: quantify sensitivity to exoskeleton–human alignment errors and robot–exo frame calibration drift; provide fast calibration procedures and evaluate multi-user consistency.
- Safety mechanisms are not detailed: specify torque/velocity/force limits, collision detection, and fail-safes when environmental resistance suddenly disappears; empirically evaluate safety in human‑proximate operation.
- Base teleoperation via low-cost IMU is undercharacterized: quantify drift, fatigue, and control accuracy compared to alternatives (VR HMD, foot pedals); investigate closed-loop base control with visual feedback and assistive autonomy.
- Human factors and ergonomics lack systematic evaluation: run larger, statistically powered user studies across tasks to assess comfort, fatigue, don/doff time, and proficiency learning curves; compare adjustable vs. fixed link designs.
- Data collection throughput is reported for a single task and small user sample: broaden to multiple tasks and users; report statistical significance and sources of time overhead (resets vs. teleop speed).
- Policy representation only outputs joint positions: compare against policies that explicitly output impedance (stiffness/damping) or force/torque targets; study whether learning impedance improves compliance and robustness.
- Sample efficiency and scaling are not analyzed: report performance as a function of demonstration count per task; quantify the marginal benefit of the torque modality on data efficiency across tasks.
- Generalization remains untested: evaluate zero‑shot transfer to unseen objects, materials/friction coefficients, geometry variations, and different clutter; consider domain randomization and augmentation strategies.
- Sensing modality ablations are limited: assess benefits of adding end‑effector force‑torque or tactile sensing vs. joint‑torque only; study multi-modal fusion strategies and bandwidth effects.
- Perception setup is under-specified: document camera number/placement (on-robot vs. external), depth vs. RGB, and evaluate robustness to occlusions and lighting; analyze their influence on tightly constrained tasks.
- Contact safety and environmental impact unmeasured: quantify peak contact forces, surface damage (e.g., glass scratching), and force regulation accuracy during contact-rich maneuvers.
- Teleoperation bandwidth and controller rates are not reported: specify haptic/control update frequencies and analyze how bandwidth constraints affect transparency and task success.
- Torque scaling between embodiments is heuristic: study adaptive scaling/normalization across robot inertias and kinematics to balance human comfort with perceivable feedback.
- Robustness to model errors in dynamics compensation is unknown: quantify effects of gravity/friction/Coriolis compensation errors on transparency and stability; explore identification/adaptation methods.
- Retargeting transition behavior near kinematic boundaries is unverified: measure tracking errors and user experience near joint limits and during rapid posture changes; add smoothing or predictive filtering as needed.
- Bimanual coordination policies are not dissected: analyze inter‑arm timing, role assignment, and failure modes; evaluate whether torque cues improve coordination vs. vision‑only or position‑only baselines.
- Long-horizon autonomy is demonstrated on one scenario: extend to more multi‑stage tasks with branching logic; measure failure recovery, error compounding, and policy reactivity.
- Real-world Franka results are missing: validate the claimed benefits of more accurate torque sensing on Franka hardware and compare against OpenArm/X‑ARM across identical tasks.
- Mechanical reliability and portability are not validated long-term: perform endurance tests (thermal, wear, actuator heating), quantify payload vs. weight trade-offs, and evaluate real-world field deployment.
- Open-sourcing and reproducibility are unclear: release CAD, firmware, retargeting code, and training scripts to enable replication and ablation by the community.
- Comparative baselines are limited: include head-to-head comparisons with other exoskeleton teleop systems that provide force reflection/impedance control (e.g., ACE, ANYexo/Harmony), beyond “No-torque” and UMI.
- Policy safety at deployment is not addressed: integrate torque‑limiters, online anomaly detection, and safety supervisors to prevent damage in OOD situations or when contact sensing is erroneous.
- Extension to hands/dexterous manipulation is unexplored: design and evaluate finger/hand exoskeleton interfaces and tactile feedback for fine, contact-rich tasks beyond parallel grippers.
Practical Applications
Overview
Based on the paper’s findings—real-time haptic torque feedback in a low-cost exoskeleton (UME), universal whole-arm retargeting across robot embodiments, IMU-enabled mobile teleoperation, and torque-augmented policy learning—below are concrete applications across industry, academia, policy, and daily life. Each item notes relevant sectors, likely tools/products/workflows, and key assumptions/dependencies that affect feasibility.
Immediate Applications
- Teleoperated contact-rich manipulation in labs and pilot deployments
- Sectors: robotics, manufacturing, electronics/data centers, facilities management
- What: Use UME to safely perform non-prehensile and force-mediated tasks (e.g., pushing/alignment against walls, box flipping using environmental contact, retrieving items from constrained spaces) with bimanual control and mobile bases.
- Tools/products/workflows: UME console; follower arms (e.g., X-ARM, Franka, OpenArm) and mobile base; universal retargeting middleware; standard teleop UI with haptic torque; operator SOPs for contact-rich tasks; hybrid teleop + autonomy workflows.
- Assumptions/dependencies: Follower robot must provide joint torque sensing/estimation and be sufficiently backdrivable; low-latency bidirectional communication; site safety interlocks and emergency stops; task-specific end-effectors; operator training.
- High-throughput collection of demonstration datasets for compliant policy learning
- Sectors: academia, robotics startups, software (robotics ML)
- What: Rapidly gather joint+torque+vision demonstrations to train torque-aware policies (e.g., ACT with torque embeddings) for contact-rich, space-constrained, and long-horizon tasks.
- Tools/products/workflows: UME hardware; synchronized logging of images, joint positions/velocities, torques; torque-augmented imitation-learning pipelines; dataset curation/labeling tools; evaluation suites with force-critical success criteria.
- Assumptions/dependencies: Reliable sensor calibration and time sync; data storage and processing; reproducible task setups; safety oversight during data collection.
- Cross-embodiment teleoperation and demo capture for robot OEMs and integrators
- Sectors: robotics OEMs, system integrators
- What: Use the universal retargeting algorithm to control and demonstrate tasks on robot arms with different DoFs and kinematics; build shared demo repositories across platforms.
- Tools/products/workflows: Retargeting SDK integrated with robot controllers; calibration utilities; robot-agnostic haptic mapping; cross-robot benchmarking templates.
- Assumptions/dependencies: Accurate kinematic/dynamic models and Jacobians; per-robot torque observability; consistent coordinate frames.
- Mobile manipulation for service and hospitality pilots
- Sectors: service robotics, hospitality, office services
- What: Long-horizon tasks combining base motion and bimanual skills (e.g., opening doors/fridges, placing items on tables, tidying in tight spaces) performed under supervision or teleop with torque feedback for safety.
- Tools/products/workflows: UME-operated dual-arm mobile platforms; state machines for navigation + manipulation; safety-rated perception; torque-thresholded contact behaviors.
- Assumptions/dependencies: Indoor navigation robustness; people-aware safety; limited payload and reach of current low-cost platforms; liability coverage.
- Training and upskilling operators with haptic feedback
- Sectors: education, workforce development, corporate training
- What: Leverage haptic torque feedback to teach impedance/compliance concepts and safe contact manipulation; faster operator ramp-up and higher demo throughput.
- Tools/products/workflows: Structured curricula; practice tasks (box pushing/flipping, door operation); optional VR/AR displays; telemetry and performance dashboards.
- Assumptions/dependencies: Training facilities and supervision; ergonomic fitting (link lengths); standardized assessment tasks.
- QA and R&D for contact-critical product tests
- Sectors: manufacturing QA, R&D labs
- What: Use haptic teleop to replicate and measure contact interactions (e.g., latch/hinge force profiles, frictional engagement) and to execute constrained-space assembly trials.
- Tools/products/workflows: Torque-logged test plans; interchangeable end-effectors and fixtures; analysis tooling for force/torque profiles; repeatability protocols.
- Assumptions/dependencies: Metrology-grade calibration; consistent fixtures; safe limits for contact forces.
- Safety and standards testbed for collaborative robot contact scenarios
- Sectors: policy/standards, certification bodies, safety engineering
- What: Generate reproducible, torque-annotated scenarios to evaluate force limits, compliance behaviors, and fail-safes for cobots in contact-rich tasks.
- Tools/products/workflows: Scenario libraries; torque-threshold tests; incident loggers; benchmarking reports shared with standards committees.
- Assumptions/dependencies: Access to certification-grade measurement tools; alignment with ISO/OSHA requirements; controlled environments.
Long-Term Applications
- General-purpose home robots with learned compliant, whole-body policies
- Sectors: consumer robotics, assistive tech
- What: Autonomous execution of household chores (tidying, kitchen tasks, door/fridge operation, object retrieval in clutter) using policies trained on large-scale torque-augmented demonstrations.
- Tools/products/workflows: Large multimodal datasets (vision+proprioception+torque); VLA/foundation models augmented with force/torque; on-device compliance control.
- Assumptions/dependencies: Scaled data collection in diverse homes; reliable low-cost torque-sensing hardware; strong safety and liability frameworks; user acceptance.
- Force-aware robotic foundation models and benchmarks
- Sectors: robotics ML, software
- What: Foundation models that natively ingest force/torque and learn active compliance; standardized benchmarks for contact-rich generalization across embodiments.
- Tools/products/workflows: Public torque-annotated datasets; open-source training stacks (e.g., torque-augmented ACT/diffusion); cross-robot evaluation suites.
- Assumptions/dependencies: Community standards for force/torque data schemas; compute resources; broad participation by hardware vendors.
- Standardized haptic teleoperation consoles for industrial cobots
- Sectors: industrial automation, logistics
- What: Mass-deployed, ergonomic exoskeleton consoles with torque transparency to remotely perform difficult contact tasks (e.g., insertion, deburring, cable routing), with shared autonomy.
- Tools/products/workflows: Production-grade exoskeletons (lighter materials, adjustable link lengths), fleet teleop software, remote operations centers, task libraries.
- Assumptions/dependencies: Robust connectivity (low-latency); safety certification; economic case vs. full automation; union/workforce agreements.
- Remote maintenance in constrained or hazardous environments
- Sectors: nuclear, space, defense, chemical processing, utilities
- What: Torque-informed teleoperation and semi-autonomy for manipulation in gloveboxes, reactor cells, spacecraft interiors, or energized substations, where contact and tight clearances dominate.
- Tools/products/workflows: Radiation-/hazard-hardened manipulators; redundant sensing; supervisory autonomy; digital twins for rehearsal.
- Assumptions/dependencies: Specialized hardware survivability; strict safety and regulatory approval; high reliability communications.
- Data center operations automation
- Sectors: information technology, facilities
- What: Semi-autonomous/teleoperated tasks analogous to “GPU picking” (e.g., swapping accelerator cards, cable management) in dense racks with minimal clearance, eventually transitioning to autonomy.
- Tools/products/workflows: Rack-compatible end-effectors; guided insertion/removal routines; torque envelopes for sensitive components; asset tracking integration.
- Assumptions/dependencies: Vendor approvals and warranties; ESD and cleanliness controls; failure recovery procedures.
- Clinical and rehabilitation adaptations (research to productization)
- Sectors: healthcare, rehab robotics
- What: Adapt exoskeleton haptic feedback for therapeutic training or for patients to teleoperate assistive robots for ADLs, leveraging torque cues to train safe force modulation.
- Tools/products/workflows: Medical-grade exoskeletons; clinician-facing software; at-home assistive robot integration; outcome-tracking analytics.
- Assumptions/dependencies: Medical device certification and trials; infection control; reimbursement models; individualized fitting and safety assurances.
- Human-robot shared control frameworks using force-aware intent
- Sectors: robotics research, industrial automation
- What: Combine operator haptic inputs with autonomous compliance policies for blended control that adapts to unknown contacts in real time.
- Tools/products/workflows: Shared autonomy planners; intent inference from torque and motion; safety monitors that fuse haptic and vision signals.
- Assumptions/dependencies: Robust arbitration between human and autonomy; formal safety proofs/assurances; user trust and transparency.
- Consumer-grade haptic telepresence for home/service robots
- Sectors: consumer electronics, service robotics
- What: Affordable exoskeleton + robot bundles with VR/AR interfaces for remote household/task assistance, gig-style teleoperation marketplaces, and on-demand services.
- Tools/products/workflows: Integrated VR/AR HMDs (or IMU-only as low-cost mode); app-based task dispatching; payments and audit logs; remote supervision.
- Assumptions/dependencies: Network QoS; platform safety and insurance; ergonomic designs for varied users; privacy and security compliance.
- Policy, standards, and governance for haptic teleoperation and force-aware robots
- Sectors: policy/regulation, insurance, labor
- What: New guidelines for recording and auditing force/torque during teleop; cobot force limits in shared spaces; remote work and cross-border teleoperation policies.
- Tools/products/workflows: Compliance toolkits (force logs, safety certificates); standardized test scenarios derived from torque-annotated datasets; insurer-approved risk models.
- Assumptions/dependencies: Multi-stakeholder consensus (industry, academia, regulators); harmonization across jurisdictions; enforceable monitoring.
- Simulation and digital twins with torque-in-the-loop
- Sectors: software, robotics R&D
- What: High-fidelity simulators and digital twins that model contact forces and retargeted whole-arm kinematics for training and validation before deployment.
- Tools/products/workflows: Physics engines with accurate contact and actuator models; sim-to-real pipelines leveraging torque data for calibration; automated scenario generation.
- Assumptions/dependencies: Improved simulation fidelity for contact and friction; validated parameter identification; compute capacity.
Notes on feasibility and current constraints observed in the paper:
- Hardware maturity: Current UME prototype uses PLA links (heavier/less robust), fixed link lengths, and relies on low-reduction, torque-dense actuators. Production versions will need lighter materials and adjustable ergonomics.
- Robot dependencies: Best performance requires follower robots with accurate joint torque sensing and backdrivable actuation; retargeting assumes good kinematic and dynamic models.
- Control loop and latency: Torque transparency and safe contact depend on low-latency bidirectional control and well-tuned gravity/Coriolis/friction compensation.
- Safety and compliance: Real-world use requires safety-rated interlocks, force limits, certification (especially in public spaces or healthcare), and operator training.
- Environment variability: Robust autonomy from demonstrations depends on diverse data; highly cluttered homes/industrial sites may require additional sensing and domain coverage.
Glossary
- Abduction/adduction: Anatomical movements where a limb moves away from (abduction) or toward (adduction) the body's midline; relevant to modeling shoulder motion in exoskeletons. "flexion/extension, abduction/adduction, and internal/external rotation."
- Active compliant policies: Robot control strategies that intentionally modulate motion and force to respond to contact and resistance during manipulation. "Teleoperation is an important paradigm for collecting human demonstrations for learning active compliant policies."
- Backdrivable actuators: Motors and transmissions designed to be easily driven by external forces, enabling safe, low-impedance interaction and transparency in haptic feedback. "including coaxial actuator configurations and backdrivable high-torque actuators"
- Backlash: Mechanical play between gear teeth that causes a delay or dead zone in motion transmission, affecting precision and compliance. "achieves better compliance and more accurate odometry through a lower reduction ratio and backlash, while remaining kinematically holonomic."
- Ball-and-socket joint: A joint allowing three rotational degrees of freedom, used to model shoulder and wrist mechanics. "a ball-and-socket joint with three rotational DoFs"
- Bimanual: Involving two manipulators/arms coordinating together for manipulation tasks. "teleoperate a bimanual robot to unsheathe a sword while blindfolded."
- Coaxial configuration: Arrangement where multiple rotational axes intersect at a single point, improving anatomical alignment and range of motion. "we arranged the actuators in a coaxial configuration"
- Degrees of Freedom (DoF): Independent parameters that define a system's configuration; in robotics, the number of independent joint variables. "including OpenArm (7-DoF), Franka (7-DoF), and X-ARM (6-DoF)."
- Dynamically consistent Jacobian inverse: An inverse mapping that accounts for inertia (via the joint-space mass matrix) to correctly distribute forces/torques in operational space. "the transpose of the dynamically consistent Jacobian inverse"
- End-effector: The tool or gripper at the end of a robot arm that interacts with objects/environment. "these systems typically provide control only at the end-effector level"
- Feedforward control: Commanding outputs based on desired motion/state without relying solely on feedback, often mapping leader states to follower commands. "Position and Velocity Feedforward."
- Forward kinematics: Computing the pose/orientation of a robot link from its joint angles using the kinematic chain. "computed with forward kinematics:"
- Glenohumeral joint: The anatomical shoulder joint modeled as a 3-DoF ball-and-socket for exoskeleton design. "shoulder (glenohumeral) joint"
- Gravity compensation: Generating torques to counteract gravity so joints feel lighter and feedback is more transparent. "We compute the gravity-compensation torque based on the exoskeleton's orientation relative to gravity."
- Haptic torque feedback: Real-time tactile/force sensations provided to the operator reflecting the robot’s measured joint torques. "UME provides real-time haptic torque feedback"
- Hinge joint: A 1-DoF joint permitting rotation around a single axis, used to model the elbow. "The elbow (humeroulnar) joint is a hinge joint with one DoF: flexion/extension."
- Holonomic: A mobile base whose achievable velocities span all in-plane motions (e.g., omnidirectional), simplifying whole-body coordination. "remaining kinematically holonomic."
- IMU (Inertial Measurement Unit): Sensor measuring acceleration and angular rates, used to infer orientation for base control and compensation. "Equipped with an embedded IMU, it enables teleoperation for mobile manipulation."
- Inverse kinematics (IK): Computing joint angles that achieve a desired end-effector pose/orientation. "thus relies on inverse kinematics (IK) to enforce collision constraints at inference time."
- Jacobian: Matrix relating joint velocities/torques to end-effector spatial velocities/forces for a manipulator. "For velocity feedforward, joint velocity targets are mapped using the respective sub-manipulator Jacobians for ball-joint rotation."
- Joint-space inertia matrix: Mass/inertia matrix A describing how joint accelerations relate to applied torques. "A denotes the joint-space inertia matrix of the follower shoulder."
- Kinematic singularities: Configurations where the Jacobian loses rank, causing poor control or large joint motions for small task-space changes. "avoids the kinematic singularities that typically plague 6D end-effector task-space control"
- Leader-follower teleoperation: Control scheme where a human-worn device (leader) drives a robot (follower), ideally with bidirectional force feedback. "Unlike other isomorphic leader-follower teleoperation systems"
- Macro-Mini manipulator architectures: Design approach that decouples large-scale (macro) motion from precise (mini) motion for stability and performance. "Inspired by the decoupling philosophies in Macro-Mini manipulator architectures"
- Mobile manipulation: Coordinated control of a robot arm(s) and mobile base to perform tasks requiring movement and manipulation. "enabling mobile manipulation teleoperation."
- Non-prehensile manipulation: Manipulation without grasping, using pushes, slides, and environmental contacts. "non-prehensile manipulation where a robot leverages environmental contact"
- Odometry: Estimation of a robot’s change in position over time, often using wheel encoders or base kinematics. "more accurate odometry"
- Proprioception: Internal sensing of joint states (positions, velocities, torques) used for control and learning. "image and robot joint proprioception"
- Pronation/supination: Rotational movements of the forearm/wrist turning the palm down (pronation) or up (supination). "pronation/supination"
- Pseudo-inverse: The Moore–Penrose generalized inverse used to solve under/overdetermined linear systems in control mapping. "computed using the pseudo-inverse of the follower's shoulder Jacobian"
- Quasi-direct-drive motors: Low gear-reduction, high-torque-density actuators that improve backdrivability and transparency. "we instead adopt quasi-direct-drive motors with substantially lower reduction ratios"
- Range of Motion (RoM): The set of achievable joint angles, reflecting flexibility and anatomical coverage. "replicates the full range of motion (RoM) of the human wrist"
- Retargeting: Mapping motions and forces from one embodiment (exoskeleton) to another (robot) while preserving intent. "Our retargeting framework is robot-agnostic."
- Spherical joint: A virtual 3-DoF joint representing ball-joint rotations for shoulder or wrist sub-manipulators. "a virtual 3-DoF spherical shoulder joint"
- Task-space control: Controlling motion in Cartesian space (position/orientation) rather than joint-space. "6D end-effector task-space control"
- Teleoperation: Remote operation of a robot by a human, often with motion and force feedback channels. "Teleoperation is an important paradigm for collecting human demonstrations"
- Torque transparency: The fidelity with which sensed robot torques are reflected back to the operator without distortion. "to maximize the interaction torque transparency"
- Whole-arm configuration: Full joint-state representation of the arm, beyond just the end-effector pose, crucial in constrained spaces. "UME records whole-arm configuration"
- Whole-body manipulation: Coordinated control of arms and base (and potentially torso) to perform complex tasks. "compliant whole-body manipulation"
Collections
Sign up for free to add this paper to one or more collections.

