- The paper demonstrates that combining bidirectional force, microfluidic pressure, and thermal feedback significantly enhances teleoperated object recognition and manipulation.
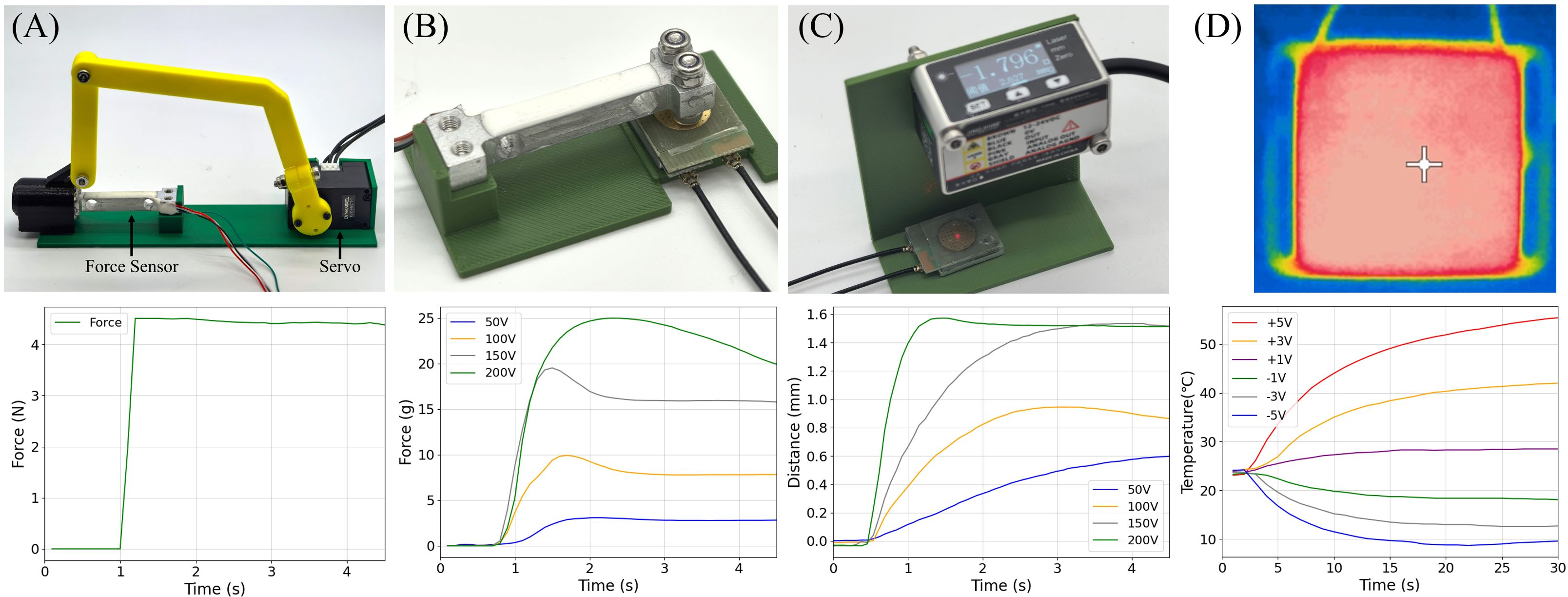
- It details a modular design with 20 DoF, microfluidic actuators delivering up to 2.47 kPa pressure, and a TEC module regulating temperature from 10° to 55°C via PID control.
- User studies revealed 100% shape recognition, high stiffness discrimination, and reduced manipulation failures, highlighting the benefits of multimodal feedback.
MFE: A Multimodal Feedback Exoskeleton for Enhanced Teleoperation
Introduction and Motivation
The paper "MFE: A Multimodal Hand Exoskeleton with Interactive Force, Pressure and Thermo-haptic Feedback" (2604.02820) proposes a low-cost, open-source hand exoskeleton capable of delivering hybrid haptic feedback—simultaneously providing active force, pressure, and temperature sensations. This responds to the persisting gap in commercial and open-source haptic devices, which often lack multi-modality, are prohibitively expensive, or do not reach the fidelity required for high-quality human teleoperation and data collection in embodied AI. The system is aimed at practical deployment scenarios including remote robotics operation, surgical telemanipulation, hazardous task execution, and tactile data acquisition for learning-based robotics.
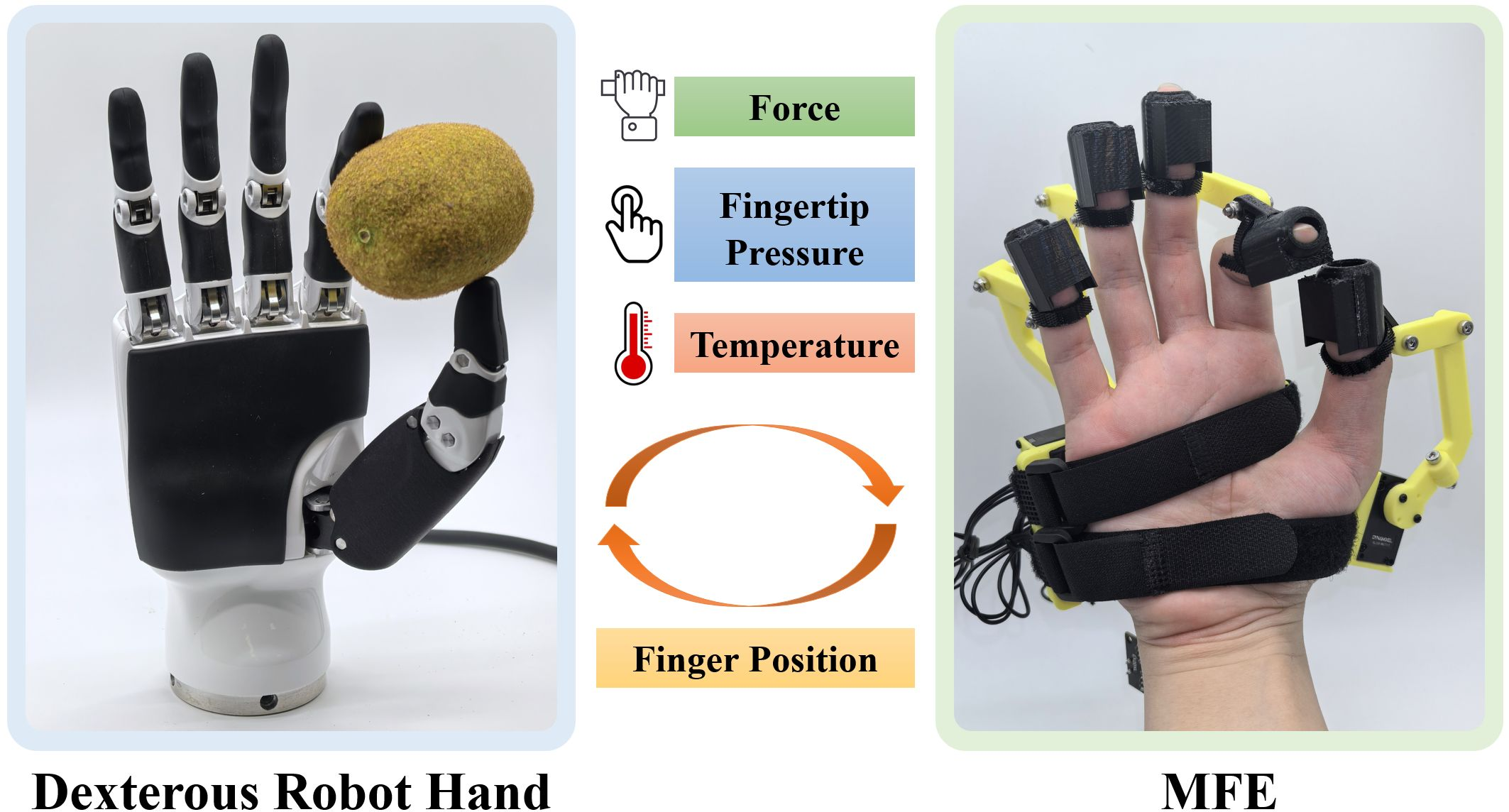
Figure 1: The exoskeleton simultaneously captures finger positions and renders remote contact force, fingertip pressure, and palm temperature.
System Architecture and Multimodal Design
Force Feedback Subsystem
The exoskeleton features 20 DoFs for hand pose capture, using Dynamixel XL330-M288-T actuators coupled with 3D-printed linkages for direct force and position mapping. The system is unique in its bidirectional active force feedback—capable of both pushing and pulling actions per finger at up to 8.1 N output, accomplishing a degree of realism previously limited to high-end commercial exoskeletons while significantly reducing BOM costs.
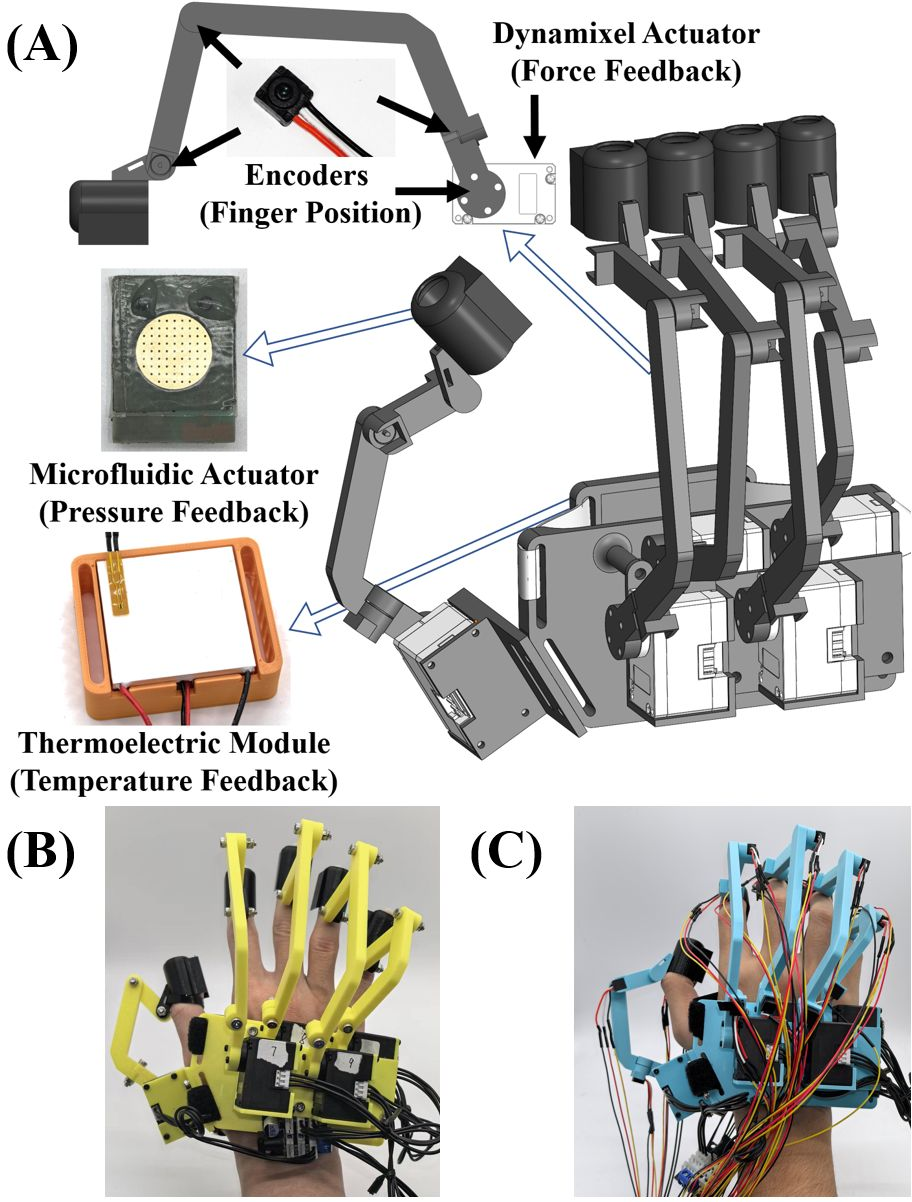
Figure 2: Structural, canonical, and joint-tracked designs for the MFE exoskeleton, highlighting modular architecture and sensor integration.
Fingertip Pressure and Vibrotactile Feedback
Fingertip feedback is achieved with microfluidic actuators based on electro-osmotic pumps, enabling both static and dynamic (vibratile) pressure rendering without bulky mechanical pumps. These actuators provide localized stimuli with a maximum pressure of 2.47 kPa and 1.65 mm membrane deformation. Fabrication integrates high-density PCB electrodes, microfiltered fluidic paths, and elastomeric membranes, all controlled via high-voltage PWM drivers, ensuring tight response control and safety.
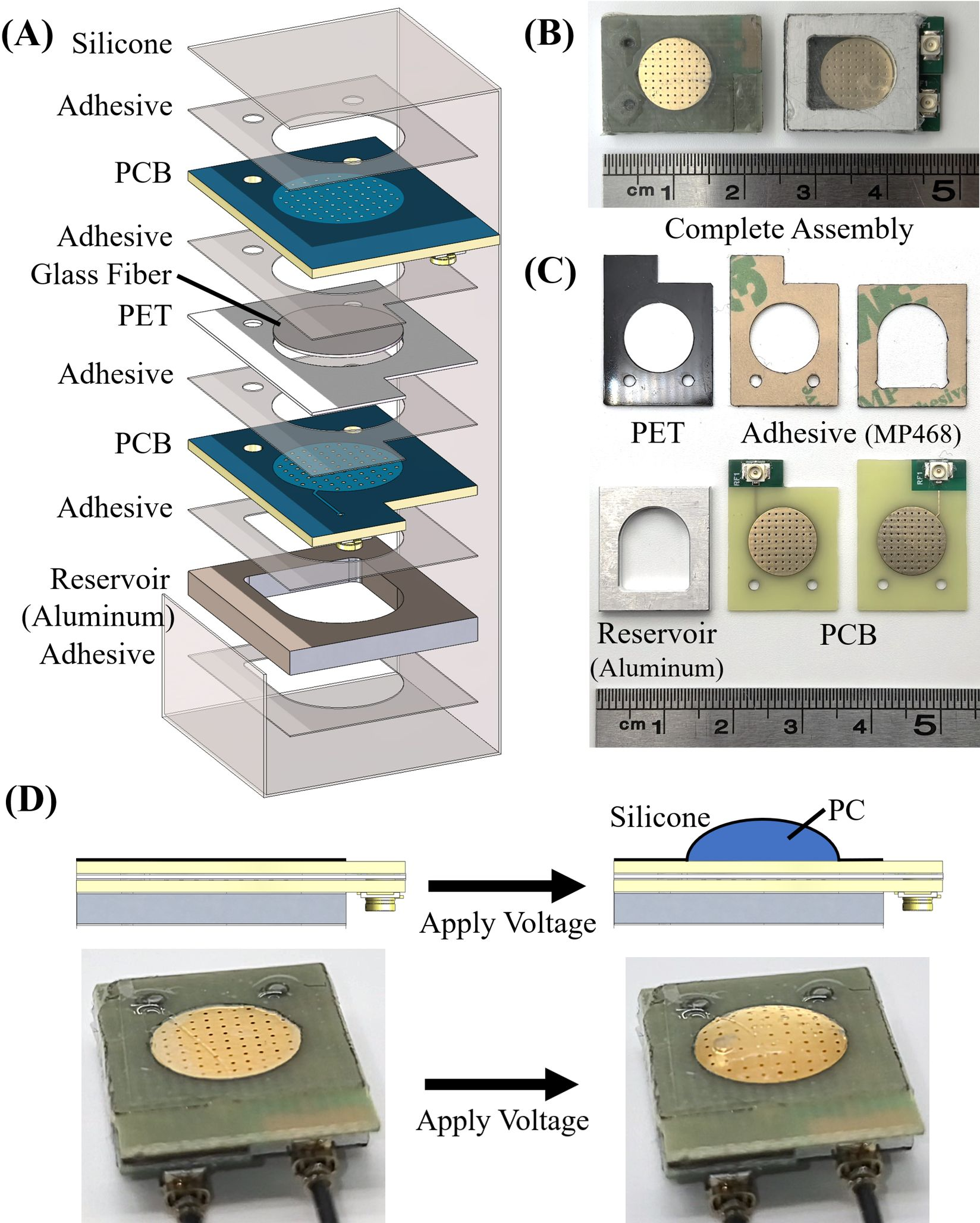
Figure 3: Construction, assembled view, individual components, and working principle of the microfluidic actuator module.
Thermal Feedback
Thermal cues are delivered via a palm-mounted thermoelectric heat pump (TEC), driven by closed-loop PID thermal control. The TEC achieves regulated output in the 10–55 °C range with active feedback and cooling fan integration to minimize actuation delay. On the robot side, a custom FPC-based flexible membrane array captures surface temperature for mapping to the human operator.
Integrated Teleoperation Pipeline
MFE is embedded in a full teleoperation ecosystem. The hand exoskeleton's joint encoder data—optionally increased with multi-joint Hall effect sensors—are mapped in real-time to a 6-DoF RH56BFX robot hand. Bilateral feedback includes contact force rendering via measured fingertip loads, pressure mapping with PWM-controlled microfluidic output, and temperature rendering using real-time sensor telemetry from the manipulated remote object.
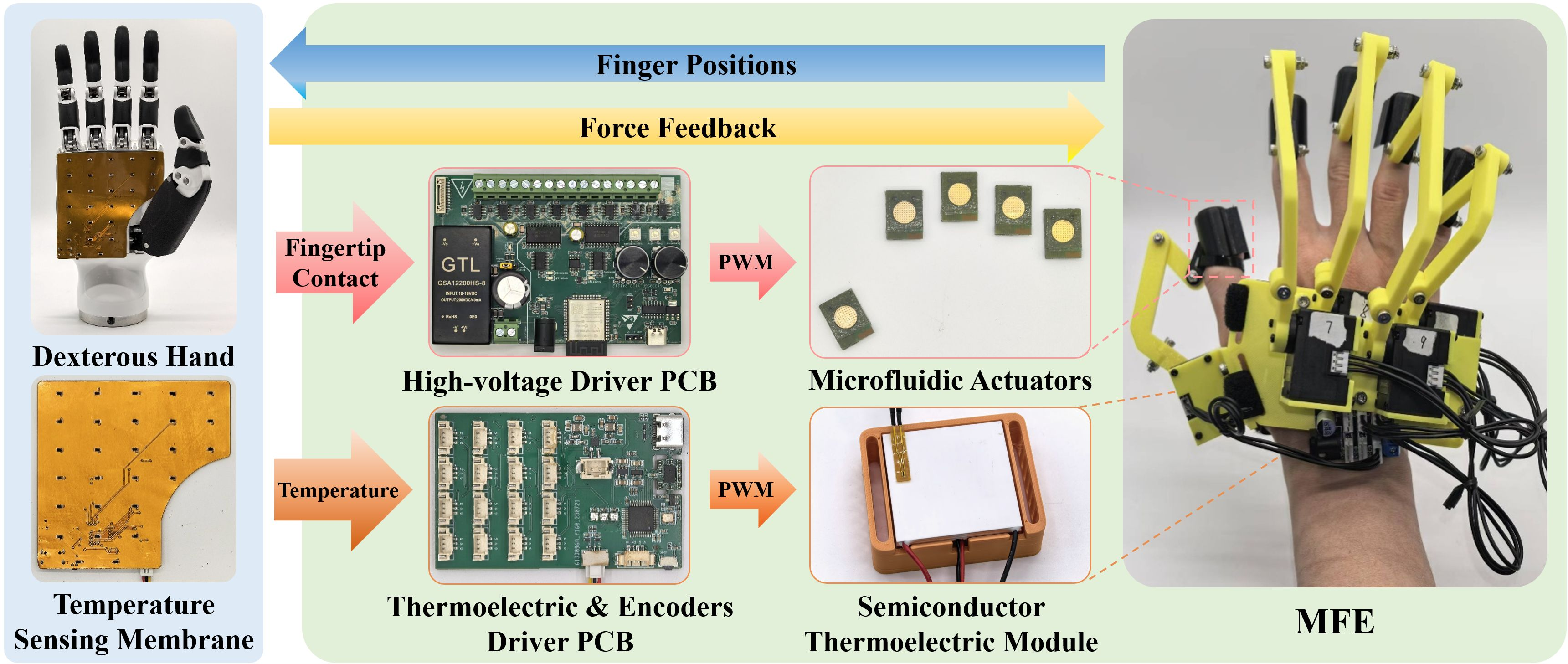
Figure 4: Full technical pipeline of the MFE-based teleoperation system, spanning exoskeleton, robot hand, actuator and sensor arrays, and feedback loops.
Quantitative Benchmarks and Human Experiments
Device Characterization
Extensive parametric measurements quantify the capabilities of each feedback modality:
Teleoperation User Study
A 10-subject study evaluated teleoperated object recognition, deformable object manipulation, and temperature discrimination using the MFE. Key results:
- Object recognition: 100% success in shape, 90% in stiffness with multimodal feedback; lower rates with unimodal feedback.
- Deformable manipulation: Significantly reduced content spillage (statistically significant) and decreased rate of failure with multimodal haptics, compared to force/pressure only or no feedback.
- Thermal cue perception: All subjects successfully ranked cup temperatures; typical recognition delay approximately 4 s with a minimal ∼5 °C difference threshold.
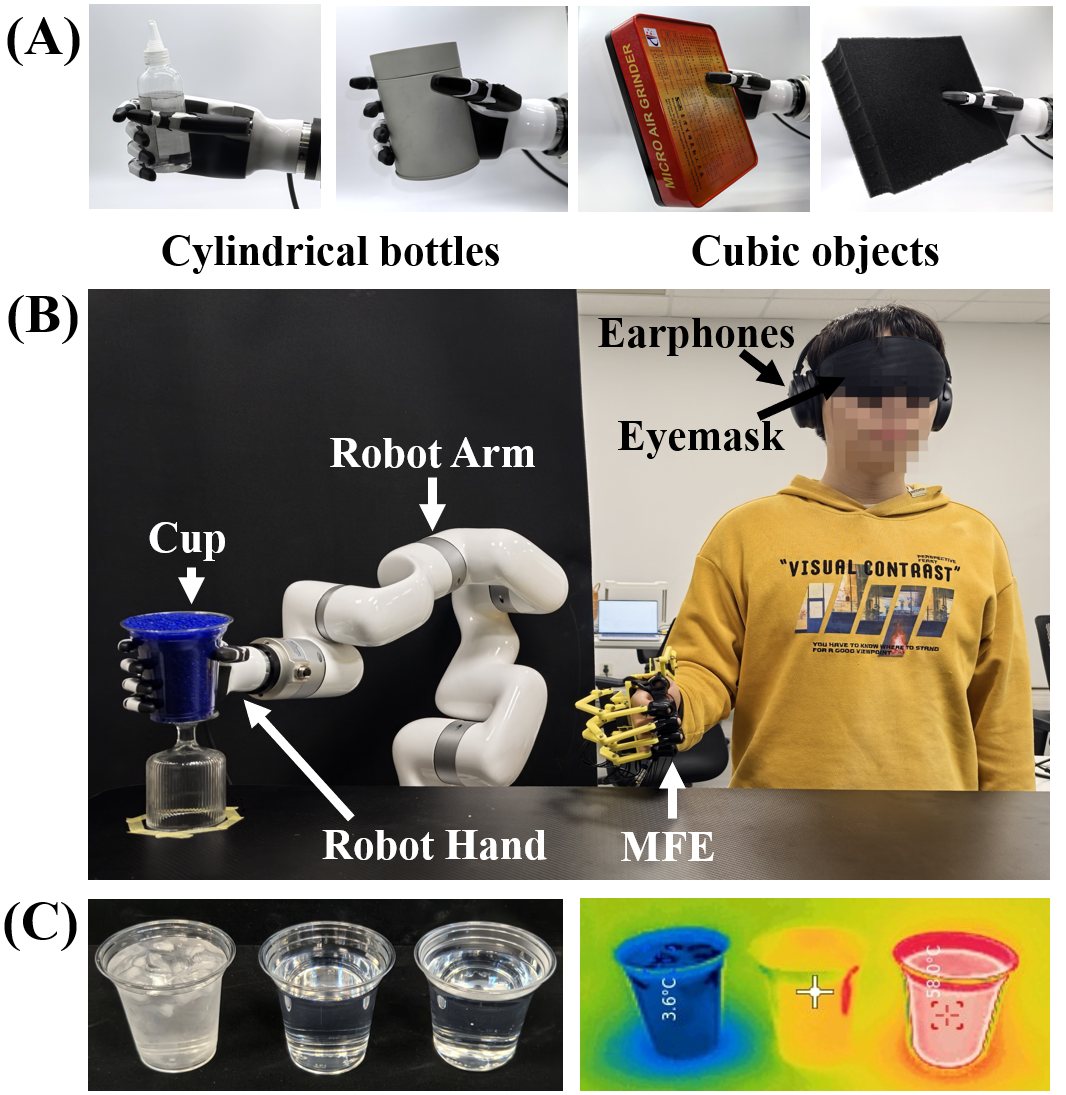
Figure 6: Task setups for shape and stiffness discrimination, cup manipulation with deformable loads, and temperature ranking.
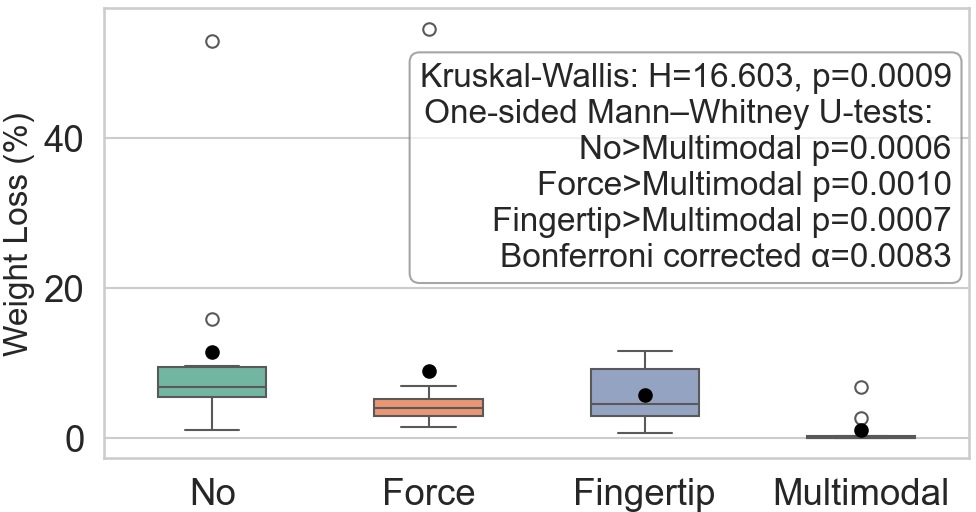
Figure 7: Statistical evaluation of object manipulation performance under variant feedback conditions across users.
Implications, Limitations, and Future Directions
The MFE platform delivers a unique suite of open-source, modular, and low-cost multimodal haptic feedback. Strong human trial results demonstrate the clear superiority of hybrid feedback for teleoperation skill transfer and situational awareness. Notably, the device's cost/performance ratio outperforms established platforms, making it accessible for broad adoption in robotic skill learning, embodied AI data collection, VR, and medical telemanipulation contexts.
However, latency for thermal rendering (≈4 s) and dynamic response of pressure/force actuators (≈100–300 ms) remain limiting factors for high-speed manipulation tasks. Current designs also constrain temperature mapping to a spatially coarse, palm-located feedback. Future research is expected to focus on higher-resolution thermal arrays, enhanced actuator bandwidth, bus-based encoder networking, and direct use of MFE-mediated data for reinforcement or imitation learning in autonomous robot hands.
Conclusion
This work presents the first low-cost, open-source exoskeleton integrating bidirectional force, localized pressure, and thermal feedback for human-robot teleoperation. Quantitative device and user-level experiments illustrate substantially improved performance in object recognition, manipulation fidelity, and situational awareness. The MFE stands as a modular platform for further development in immersive telerobotics and as a research tool for multimodal data collection in AI-driven manipulation domains.
(2604.02820)