NeuROK: Generative 4D Neural Object Kinematics
Abstract: Data-driven approaches have revolutionized 3D vision, enabling transformers to effectively reconstruct and generate static 3D objects. However, generating simulative 4D dynamics -- realistic temporal deformations of static objects under various physical conditions -- remains challenging and often ad hoc, despite its importance in building comprehensive 3D world models. Most existing methods assume a predefined physical model and use system identification to estimate parameters, restricting these methods to specific categories and small-scale datasets. We propose that these restrictions can be overcome by learning a data-driven kinematic state parameterization for object-centric physical systems. Specifically, we learn both a latent space representing all possible states of the object and a decoder that maps any sampled latent to a plausibly deformed shape of the object. We refer to this parameterization as Neural Object Kinematics (NeuROK), and learn a transformer-based encoder-decoder model on a curated large-scale 4D dataset. This formulation and the learned model significantly simplify the generation of simulative dynamics since we only need to consider the dynamics within a low-dimensional latent space from the Lagrangian mechanics' perspective in classical physics. We demonstrate the effectiveness and generality of this neural simulation framework across diverse dynamic object types, showing clear advantages over prior works. Project page: https://chen-geng.com/neurok


Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
The paper introduces NeuROK, a new way to make 3D objects “come alive” by predicting how they bend, fold, or move over time. Think of 4D as “3D + time.” Given a single 3D snapshot of an object (like a chair, a shirt, a jelly-like toy, or a multi-part gadget), NeuROK can generate a believable animation of how that object would move under pushes, pulls, or other physical conditions—without being told the object’s specific physics rules ahead of time.
What questions does it try to answer?
- Can we generate realistic motions for many different types of objects (rigid, bendy, stretchy, multi-part) without building a custom physics model for each kind?
- Can we find a simple, data-driven way to describe all the “valid poses” an object can take, so that simulating motion becomes easier and more general?
- Can we learn this from examples of objects moving over time, without needing detailed physics labels like mass, stiffness, or exact forces?
How did the researchers do it?
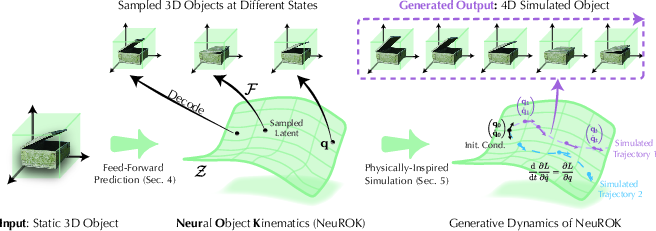
The core idea is to learn a compact “control panel” for each object that captures all its plausible shapes. Then, instead of simulating every vertex or particle of the object directly, they simulate how the small set of control knobs change over time.
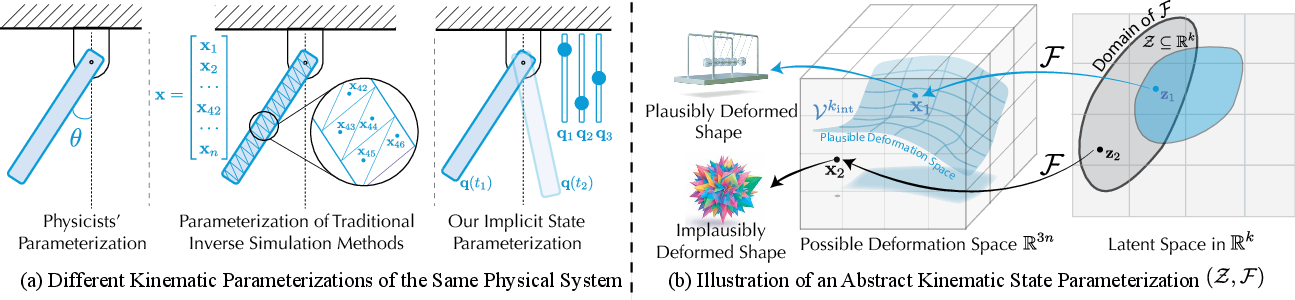
Step 1: Learn the object’s “control knobs” (a compact state space)
- Imagine every plausible shape of an object as a point on a hidden “shape map.” Most random deformations look wrong, but real poses cluster on a much smaller, meaningful region.
- NeuROK learns this region as a low-dimensional latent space: a small set of numbers (the “control knobs”) that can be turned to produce realistic deformations.
- A neural “decoder” acts like a smart translator: give it the control knobs, and it outputs a nicely deformed version of the object.
Analogy: Instead of controlling every pixel on a TV screen, you adjust a few sliders like brightness, contrast, and color. Those few controls cover most useful changes.
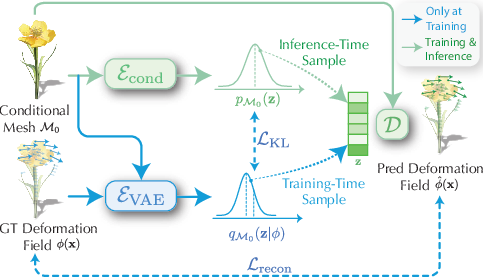
Step 2: Train without physics labels using a conditional VAE
- They use a machine learning model called a conditional variational autoencoder (VAE), built with transformers.
- Input: a 3D object and examples of how it moves across time (4D sequences).
- The VAE learns:
- A prior over the object’s latent space: “these are the kinds of control settings that produce valid poses for this object.”
- A decoder that turns any latent code into a specific deformation of the mesh surface.
- No explicit physics parameters (like material stiffness) are required—just geometry over time.
Analogy: The model watches lots of short “flipbook” animations of objects and learns a compact way to describe how each object typically moves.
Step 3: Reduce the controls to the most important ones
- Even the learned latent space can be bigger than needed. They apply a technique called Active Subspace to keep only the most important directions—the knobs that matter most for changing the shape.
Analogy: If a control panel has 20 sliders but only 5 truly change what you care about, keep those 5.
Step 4: Make it move with physics in the latent space
- Once you have the compact control knobs, the team uses ideas from classical physics (Lagrangian mechanics) to simulate motion in that small space.
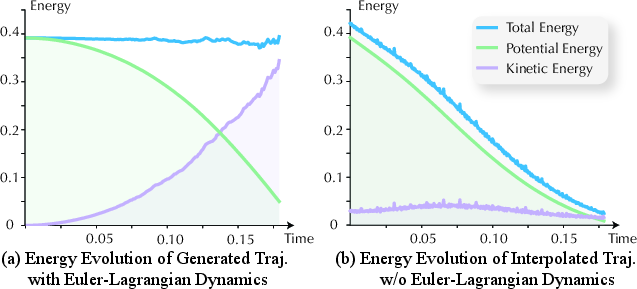
- Instead of writing custom rules for cloth vs. rubber vs. hinged objects, they define simple energy terms (like “kinetic energy” for movement and “potential energy” for things like gravity or springs) on the latent variables and then solve the standard Euler–Lagrange equations.
- The result: a physically inspired motion computed by evolving the control knobs over time, then decoding them back to animated shapes.
Analogy: It’s like letting a ball roll on a landscape of hills and valleys, but the landscape lives in the space of control knobs. The path it takes follows the physics of energy.
What did they find, and why is it important?
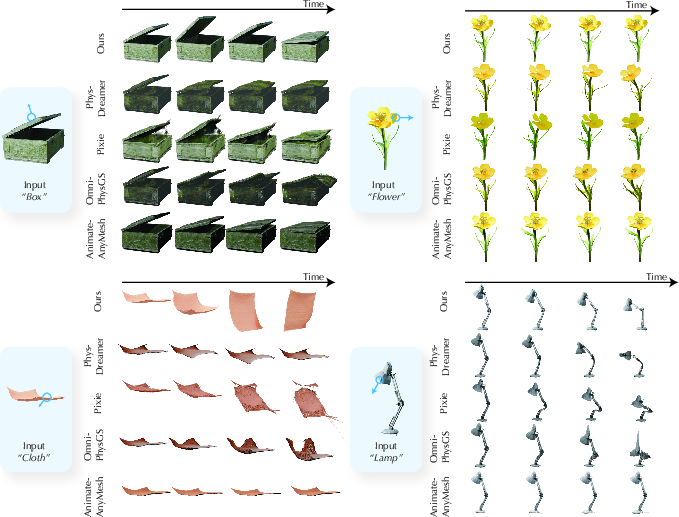
- It works across many object types. Because NeuROK doesn’t assume a specific structure (like “this must be cloth” or “this must be a robot arm”), it can animate elastic bodies, clothing, squishy objects, and multi-part items—all with one framework.
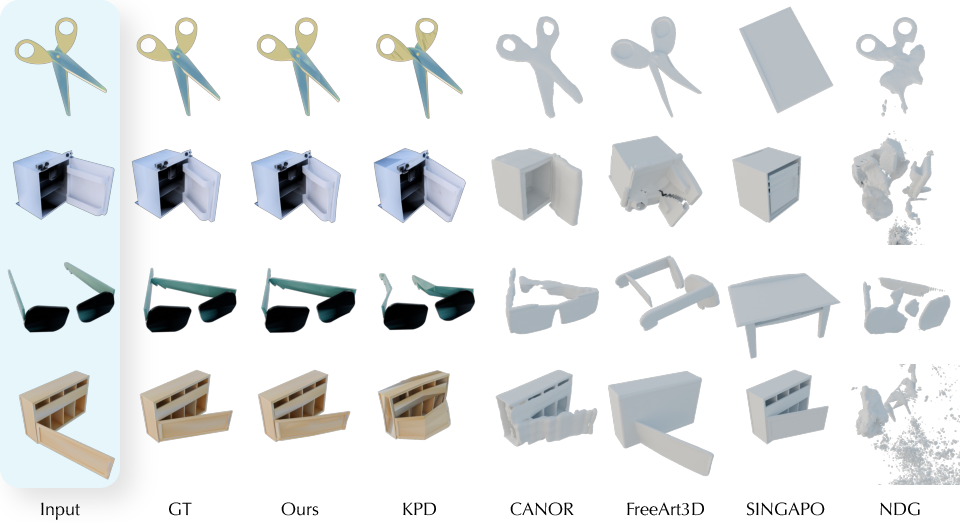
- It learns plausible deformation spaces. Given a target pose, NeuROK can find control settings that closely reconstruct that pose, often more accurately than previous methods. This shows the learned “control space” is compact, smooth, and useful.
- It generates realistic motions. Compared to other systems that either rely heavily on predefined physics or are trained end-to-end for a specific domain, NeuROK produces motions that people judged as more physically plausible and visually convincing in user studies.
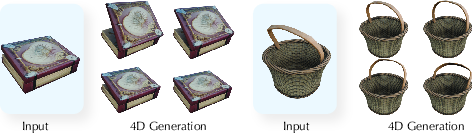
- It scales and generalizes. NeuROK learns from large 4D datasets without needing physical annotations like mass or force labels. It also shows promise on real scanned objects, not just synthetic models.
- It respects basic physics trends. Analysis shows that under their Lagrangian setup, total energy stays roughly consistent when it should, which is a sign of physically meaningful behavior.
Why this matters:
- Making 3D objects move realistically usually requires lots of manual modeling or detailed physics setup. NeuROK cuts that down by learning a reusable “motion brain” from data, then applying standard physics ideas in a small, manageable space.
- This can speed up content creation for games, movies, VR/AR, and simulation for robots—especially when objects are varied and unknown in advance.
What could this change in the future?
- General-purpose 3D simulators: NeuROK hints at a future where you can animate almost any scanned or modeled object realistically without painstaking setup.
- Faster design and prototyping: Artists and engineers could quickly test motions or interactions by adjusting high-level conditions (like “push here” or “drop from this height”) and letting the model handle the details.
- Better world models for AI and robotics: Robots or virtual agents need to predict how objects will move when touched. Learning object kinematics directly from data, plus simple physics in latent space, could make this more robust and scalable.
In short: NeuROK shows a new path—learn the few most important “control knobs” that describe how an object can move, then use basic physics on those knobs to create believable 4D animations. It’s simple in spirit, broadly applicable, and doesn’t depend on hard-coded rules for each object type.
Knowledge Gaps
Unresolved gaps and open questions
Below is a focused list of concrete gaps, limitations, and open questions the paper leaves unresolved:
- Definition and construction of the potential energy V(z): The paper invokes a “category-agnostic” potential over latents but does not specify how V is defined, parameterized, or calibrated to capture gravity, elasticity, constraints, or loading. It remains unclear whether V is analytic, learned, time-varying, or dependent on object geometry and material.
- External forces and generalized forces: The presented Euler–Lagrange formulation omits explicit generalized forces Q(z, ẋ, t) (e.g., Lagrange–d’Alembert terms). How to inject forces, torques, and actions (including time-dependent inputs) into the latent dynamics consistently is not detailed.
- Dissipation and non-conservative effects: The framework appears to conserve total energy (as shown in analysis), implying no damping. How to incorporate Rayleigh damping, friction, drag, or plasticity in latent space without breaking stability remains open.
- Contact, collision, and friction modeling: There is no explicit treatment of unilateral constraints, contact impulses, or frictional forces. How to detect and resolve contacts (self-contacts and environment contacts) in latent space and prevent interpenetrations is not addressed.
- Multi-object interactions: The formulation is object-centric and does not describe interactions between multiple independently parameterized objects (e.g., collisions, coupling, joints across objects). How to compose multiple NeuROKs into a consistent multi-body/multi-object simulator is unclear.
- Mapping from “actions/forces” to boundary conditions: The paper claims conditioning on forces/actions/velocities but operationalizes only initial positions/velocities optimization. How to map user-specified actions or control signals to generalized forces or boundary values is unspecified.
- Physical unit calibration and time-scale: Mass m, gravitational acceleration, and material-dependent scales are not identified from a single snapshot. How to calibrate units and time-scales to make predictions quantitatively consistent with real-world physics is not discussed.
- Learned kinematic manifold coverage and guarantees: The method assumes the decoder’s range coincides with the true plausible configuration manifold. There is no guarantee of completeness (missing valid poses) or exclusivity (excluding implausible poses). How to quantify and enforce manifold validity remains open.
- Latent dimensionality selection and stability: Active Subspace reduction uses a surrogate (norm of predicted deformation) and linear projection. Whether this preserves geodesics, curvature, and dynamic stability (e.g., prevents spurious modes) is unvalidated. Sensitivity to k and k_q is not analyzed.
- Christoffel symbols and metric computation: Computing G(z)=JᵀJ and Γ requires first/second-order derivatives of a deep decoder. The computational cost, numerical stability, and approximation strategies (e.g., low-rank, finite differences) are not reported.
- Numerical integration and stiffness: Step size control, integrator choice (implicit vs explicit), and stability under stiff dynamics (e.g., very elastic objects) are not discussed. Robustness and error accumulation over long horizons are unquantified.
- Topology constraints and changes: The approach assumes a fixed mesh topology shared across poses. Handling topological changes (tearing, fracturing, cloth self-folds) or remeshing is not supported.
- High-frequency and fine-scale deformations: Vertex driving via averaging K_nearest sampled points can smooth high-frequency details. How to preserve sharp features, wrinkles, or localized buckling remains unaddressed.
- Material heterogeneity and anisotropy: Without explicit material parameters, capturing heterogeneous or anisotropic behavior (e.g., composite objects or direction-dependent stiffness) is unclear. How to encode such properties in V(z) or the latent space is not specified.
- Generalization beyond training deformation regimes: Because NeuROK is learned from 4D trajectories without forces, extrapolation under novel loads or boundary conditions may be unreliable. How to quantify out-of-distribution behavior and avoid unphysical extrapolation is open.
- Control and inverse problems: While inverse kinematics is evaluated, inverse dynamics/control (finding actions/forces to reach goals) in latent space is not developed. Gradients w.r.t. actions, constraints, or environment parameters are not demonstrated.
- Uncertainty in generated dynamics: Although the VAE models deformation uncertainty, trajectory generation proceeds with a single latent path. How to sample or propagate uncertainty through the ODE to produce diverse plausible motions is unstudied.
- Dataset coverage and bias: The curated dataset’s distribution (object categories, deformation types, load cases, and real-world noise) is not characterized. The effect of dataset bias on learned kinematics and downstream dynamics is unknown.
- Real-world robustness: The real-scene demo is limited. Robustness to noisy scans, partial observations, and reconstruction errors (normals, scale, alignment) is not systematically evaluated.
- Quantitative physics validation: Evaluations focus on visual metrics and user studies. There is no measurement of physical quantities (e.g., non-penetration rates, momentum/gravity consistency, strain energy realism) or comparisons to ground-truth trajectories where available.
- Interpretability of latent coordinates: The latent dimensions are not mapped to physically meaningful DOFs. Whether interpretable, composable, or controllable subspaces (e.g., hinge angle vs elastic mode) emerge is unknown.
- Covariance structure of the prior: The conditional prior is modeled as N(μ_cond, I), which may be too restrictive for anisotropic kinematic distributions. Learning or estimating full/structured covariances is not explored.
- Scalability with mesh and model size: The transformer encoders/decoders and derivative computations may be costly for high-resolution meshes. Training/inference time, memory footprint, and real-time feasibility are not reported.
- Theoretical guarantees: There is no analysis of stability, uniqueness, or convergence of latent-space dynamics, nor guarantees that the learned manifold and energy functions yield well-posed ODEs across diverse objects.
- Extension to non-holonomic constraints: Rolling, sliding, and other non-holonomic behaviors are not modeled. How to represent such constraints in latent space and integrate them into the dynamics is an open problem.
Practical Applications
Immediate Applications
Below are actionable use cases that can be deployed with the paper’s current capabilities, assuming access to trained NeuROK models, a 3D mesh input, and modest GPU compute for inference and ODE integration.
- [VFX, animation, and gaming] Physically plausible motion generation for arbitrary meshes without rigging or category-specific simulators
- Tools/products/workflows: Blender/Maya/Unreal plugin to “animate from a static mesh” by sampling NeuROK latents and solving latent-space ODEs for forces/actions; batch conversion of static assets into 4D clips; motion retargeting via inverse kinematics in latent space
- Assumptions/dependencies: Object-centric scenes; plausible (not engineering-accurate) physics; requires large-scale pretrained NeuROK weights; contact handling is implicit and may be approximate; performance may be offline or near-real-time depending on model size
- [3D asset marketplaces and creative platforms] Dynamic previews for static assets
- Tools/products/workflows: Server-side API to generate “open/close/flex/wiggle” motion previews; motion-based search (“find assets that bend like this”); automatic tagging with learned kinematic descriptors
- Assumptions/dependencies: Asset meshes must have clean topology or sampled point representations; boundary conditions (e.g., “push here”) provided via simple UI or presets
- [Robotics] “What-if” object response prediction for planning and data augmentation
- Tools/products/workflows: ROS-compatible module to quickly simulate plausible object reactions (e.g., door handles, drawers, soft packaging) from scans; synthetic data generation of deformable object interactions for policy training
- Assumptions/dependencies: Used for priors and augmentation rather than precise control; needs a mapping from robot actions to boundary conditions (contact point, direction, velocity); single-object focus limits complex multi-contact scenes
- [AR/VR authoring] Interactive behaviors for scanned props
- Tools/products/workflows: Authoring tool to attach simple force/gesture triggers (tap, swipe, push) to scanned meshes and auto-generate dynamic responses (e.g., close a laptop, flex a toy)
- Assumptions/dependencies: Likely offline or edge-cloud due to compute; mobile real-time requires model compression; plausible dynamics suffice for user experience
- [Design ideation and product demos] Early-stage deformation previews without material parameterization
- Tools/products/workflows: Rapid prototyping tool for industrial designers to explore “how this form might move” given simple actions; consumer-facing demos (e.g., furniture doors/drawers opening) from product scans
- Assumptions/dependencies: Not a replacement for engineering FEA/MPM; assumes low-dimensional deformation manifold; results are qualitative
- [Academic research] A general benchmark/model for object-centric 4D generation and inverse kinematics
- Tools/products/workflows: Baseline for 4D generative evaluation; dataset expansion by converting static asset libraries (e.g., Objaverse) into 4D sequences; inverse-kinematics experiments using latent optimization demonstrated in the paper
- Assumptions/dependencies: Availability of 4D training data; careful evaluation of generalization to new categories
- [Education] Interactive demonstrations of Lagrangian mechanics on learned manifolds
- Tools/products/workflows: Classroom app where students set initial velocities/forces and observe energy-conserving trajectories in the NeuROK latent space mapped to object motion
- Assumptions/dependencies: Focused on conceptual understanding, not exact physics; requires curated assets and simple boundary-condition UI
- [E-commerce and digital product pages] Motion-enabled 3D viewers
- Tools/products/workflows: “Try the motion” buttons (open/close lids, bend parts) in WebGL/Three.js viewers powered by NeuROK-generated trajectories
- Assumptions/dependencies: Server-backed inference for responsiveness; policy disclaimers that motion is illustrative
Long-Term Applications
The following opportunities likely require further research, engineering, and/or scaling (e.g., stronger contact/interaction modeling, real-time inference, multi-object dynamics, and tighter coupling to control and sensing).
- [Robotics] Model-predictive control and closed-loop manipulation using latent Lagrangian dynamics
- Tools/products/workflows: Differentiable latent ODE for on-robot MPC; online latent-space identification/fine-tuning during contact; safer interaction with novel objects
- Assumptions/dependencies: Real-time performance; robust contact/ friction modeling; sensing-to-boundary-condition estimation; safety assurances
- [Game engines] General-purpose latent dynamics engine replacing category-specific rigs and cloth/soft-body modules for many props
- Tools/products/workflows: Unreal/Unity runtime component that integrates NeuROK inference + ODE solving with physics events; motion blending across sampled latents
- Assumptions/dependencies: Runtime optimization and model compression; deterministic behavior for multiplayer/netcode; standardized interfaces for action/force inputs
- [CAD/CAE] Inverse design and rapid “pre-simulation” for form exploration
- Tools/products/workflows: CAD plugin to optimize geometry to achieve desired motion responses in latent space; fast feasibility scans before high-fidelity CAE
- Assumptions/dependencies: Coupling with material-aware simulators for final verification; geometry-latent differentiability; domain-specific constraints
- [Digital twins for logistics and manufacturing] Deformable-object twins for packaging, assembly, and handling
- Tools/products/workflows: Line-side predictive tooling that approximates how new packaging/parts deform under standard manipulations; scenario generation for operator training
- Assumptions/dependencies: Integration with plant data and sensors; multi-object interactions; calibration to material classes common on the line
- [Healthcare and bioengineering] Data-driven soft-tissue priors and training simulators
- Tools/products/workflows: Patient-agnostic simulators for basic procedural training; pre-op planning aides that initialize from scans and then refine with physics
- Assumptions/dependencies: Regulatory-grade validation; incorporation of constitutive laws and anatomy-specific constraints; safety and bias audits
- [Embodied AI] World models that couple 3D perception with learned object kinematics for better affordance understanding
- Tools/products/workflows: Multimodal agents that perceive a static scene, instantiate NeuROK states for objects, and reason about feasible interactions over time
- Assumptions/dependencies: Joint training with vision-language-action; generalization to cluttered, multi-object scenes; robust state estimation from partial observations
- [AR on-device real-time] On-phone/object-level dynamics for realistic user interactions
- Tools/products/workflows: Mobile-optimized models and solvers that react to touch/gesture in <20 ms; on-device latent caching and incremental updates
- Assumptions/dependencies: Distillation/quantization; approximation of ODE integration; thermal/power limits
- [Science of materials and physics] Discovering generalized coordinates and constitutive priors from data
- Tools/products/workflows: Methods to map learned latent energies to interpretable material models; hybrid pipelines combining NeuROK with PINNs/MPM
- Assumptions/dependencies: Curated datasets with known materials; identifiability analyses; uncertainty quantification
- [Policy and standards] Guidelines for synthetic physics usage and dataset labeling
- Tools/products/workflows: Standards to label plausible vs. validated dynamics; best practices for using generative dynamics in training/control; disclosure in consumer apps
- Assumptions/dependencies: Multi-stakeholder input (academia, industry, regulators); benchmarks and audit tooling for physical plausibility
- [Energy and soft robotics] Design and control of compliant mechanisms and energy-harvesting devices
- Tools/products/workflows: Latent-dynamics priors for conceptual designs of flexible components; co-design workflows that iterate structure and control policies
- Assumptions/dependencies: Coupling with high-fidelity solvers for final validation; material-specific extensions; durability and safety constraints
- [Finance/insurance—operational efficiency] Cost reduction in content creation and claims visualization
- Tools/products/workflows: Automated generation of dynamic explainer visuals for product behavior; internal tooling for quicker visualization of incident scenarios
- Assumptions/dependencies: Clear disclaimers separating illustration from forensic analysis; content governance
Notes on cross-cutting assumptions and dependencies:
- Object-centric scope: Current method primarily handles a single dominant deformable object; multi-object contact-rich scenes need extension.
- Plausibility vs. accuracy: Dynamics are visually/physically plausible but not guaranteed engineering-grade; high-stakes decisions require validated simulators.
- Boundary-condition specification: Practical deployment needs robust interfaces to map user/robot actions to forces/velocities and contact points.
- Data and compute: Performance and generalization depend on large-scale 4D training data, instance diversity, and GPU access; real-time use cases need model compression and solver optimization.
- Safety and governance: For consumer or safety-critical applications, provide transparency about limitations, provenance of training data, and usage constraints.
Glossary
- Active Subspace Method: A dimensionality-reduction technique that identifies important directions in high-dimensional parameter spaces for a given output function. "We perform the dimension reduction through the Active Subspace Method~\cite{constantine2014active}"
- amortized inference: Learning to predict latent variables directly with a neural network rather than optimizing them per-instance at test time. "rather than learning a generalizable, amortized-inference model on a large dataset as in our framework."
- articulated objects: Objects composed of rigid parts connected by joints (e.g., doors, drawers) that move relative to each other. "(\eg, articulated objects, continuum bodies, and cloth)"
- barycentric interpolation: A method to interpolate values inside a triangle/tetrahedron using vertex weights. "and use barycentric interpolation to compute the deformation vector"
- Chamfer distances: A metric measuring geometric discrepancy between two point sets, often used to evaluate shape reconstruction. "and evaluate reconstruction accuracy using Chamfer distances~\cite{fan2017point} and a volumetric consistency metric (IoU)."
- Christoffel symbol: Mathematical objects from differential geometry that appear in equations of motion on curved manifolds. " is the Christoffel symbol."
- conditional variational auto-encoder: A VAE conditioned on additional inputs (e.g., a mesh) to model a distribution over outputs (e.g., deformations). "we train a conditional variational auto-encoder~\cite{kingma2013vae} to learn three models"
- configuration manifold: A lower-dimensional surface embedded in a higher-dimensional space representing all valid configurations of an object. "forms a low-dimensional configuration manifold $\mathcal{V}^{k_\text{int}$ embedded in "
- configuration space: The space of all possible states (positions) of a system defined by its generalized coordinates. "in a configuration space."
- continuum bodies: Deformable objects modeled as continuous media rather than discrete parts. "(\eg, articulated objects, continuum bodies, and cloth)"
- deformation field: A function mapping each point of a shape to its displaced position under deformation. "over all plausible deformation fields\footnote{To parameterize deformation fields for use in neural networks, we sample points on the mesh and treat their deformations as the parameterization of .} "
- dual quaternions: A mathematical representation for rigid and near-rigid transformations that compactly encodes rotation and translation. "Practically, we parameterize the deformation of each point with dual quaternions."
- energy landscape: A scalar field (e.g., potential energy) over a configuration/latent space that governs system dynamics. "by considering the energy landscape over different kinematic states of an entire system."
- Euler–Lagrange equations: Fundamental equations in Lagrangian mechanics that derive motion from the Lagrangian function. "using Euler-Lagrange equations."
- generalized coordinates: Minimal set of parameters that uniquely describe a system’s configuration. "Such parameters are called generalized coordinates of the system"
- generalized velocities: Time derivatives of generalized coordinates, representing rates of change in configuration. "their time derivatives are called generalized velocities."
- Jacobian: The matrix of first-order partial derivatives describing how outputs change with respect to inputs. " is the Jacobian of "
- Kullback–Leibler divergence (KL divergence): A measure of how one probability distribution diverges from another. "supervise all three models with KL and reconstruction targets."
- kinematic state parameterization: A representation of an object’s kinematic states via a parameter space and a mapping to configurations. "a kinematic state parameterization studied in this paper is a pair "
- Lagrangian function: The scalar function L = T − V combining kinetic (T) and potential (V) energies, used to derive dynamics. "we define Lagrangian function "
- Lagrangian mechanics: A physics framework that models dynamics through energy functions and variational principles. "Lagrangian mechanics studies a physical system by defining a set of parameters"
- latent manifold: A structured subset of latent space representing valid states that can be decoded to plausible shapes. "contains a latent manifold "
- Material Point Method (MPM): A particle-based continuum mechanics method for simulating deformable materials. "such as the high-dimensional particles (material points) used in MPM~\cite{jiang2016material}"
- model reduction: Techniques that reduce the dimensionality/complexity of simulations while preserving essential behavior. "Model reduction is a common technique in forward computer graphics"
- numerical solvers: Algorithms that approximate solutions to equations of motion or differential equations computationally. "We solve it with numerical solvers and get the trajectory"
- ordinary differential equation (ODE): An equation involving functions and their derivatives with respect to a single variable (time). "by solving a physically-inspired ODE."
- perceiver-based architecture: A transformer variant that uses latent tokens and cross-attention to process variable-sized inputs. "we adopt a perceiver-based architecture~\cite{jaegle2021perceiver,zhao2023michelangelo}"
- potential energy: Energy stored by virtue of position/configuration, contributing to the Lagrangian. "using the kinetic energy and potential energy of the system."
- posterior distribution: In VAEs, the inferred distribution over latents given data and conditioning inputs. "produces the parameters of a posterior distribution ."
- prior distribution: In VAEs, the assumed distribution over latent variables before observing data. "outputs the parameters for a prior distribution "
- projective dynamics: A fast, optimization-based method for simulating deformable objects using local-global iterations. "projective dynamics~\cite{qiao2022neuphysics,du2021diffpd,bouaziz2023projective}"
- reduced-order kinematic space: A low-dimensional space capturing dominant deformation modes for efficient simulation/control. "represent the reduced-order kinematic space for a specific object"
- system identification: Estimating unknown parameters of a physics model from observed data. "and determining its parameters with system identification."
- transformer-based encoder: A neural architecture using self-attention to encode inputs into latent representations. "NeuROK uses a transformer-based encoder to predict an instance-specific latent space"
- volumetric consistency (IoU): A 3D overlap metric (Intersection-over-Union) assessing volumetric agreement between shapes. "and evaluate reconstruction accuracy using Chamfer distances~\cite{fan2017point} and a volumetric consistency metric (IoU)."
Collections
Sign up for free to add this paper to one or more collections.

