- The paper introduces EmbodiedClaw, a conversational system that automates multi-stage embodied AI tasks while significantly reducing workflow time.
- It details a unified architecture combining intent understanding, workflow orchestration, and asset-platform adaptation to enhance reproducibility and scalability.
- Empirical results demonstrate up to an 88.3% time reduction in simulation-to-data tasks and high task completion rates that rival expert performance.
EmbodiedClaw: Conversational Workflow Execution for Embodied AI Development
Motivation and Paradigm Shift
Embodied AI research is progressing toward increasingly complex, multi-task, multi-scene, and multi-model settings, encountering significant overhead in engineering workflows for environment construction, trajectory synthesis, model training, and evaluation. Despite advances in simulators and benchmarks, development processes remain encumbered by platform-specific logic and asset management, limiting scalability and reproducibility. EmbodiedClaw introduces a new paradigm—a conversational execution system capable of transforming fragmented, high-frequency embodied engineering tasks into streamlined, intent-driven workflows, systematizing development operations and compressing time-intensive processes into efficient, unified procedures.
System Architecture and Operational Principles
EmbodiedClaw operates on three primary object classes central to embodied research: simulation environments, trajectory data, and models. It supports three core capabilities—batch environment synthesis (including automatic creation and controllable scene revision), trajectory data collection (for embodied manipulation tasks), and model deployment (supporting vision-language and world models, imitation learning, reinforcement learning, and evaluation on standard benchmarks such as LIBERO, RoboTwin, and SimplerEnv).
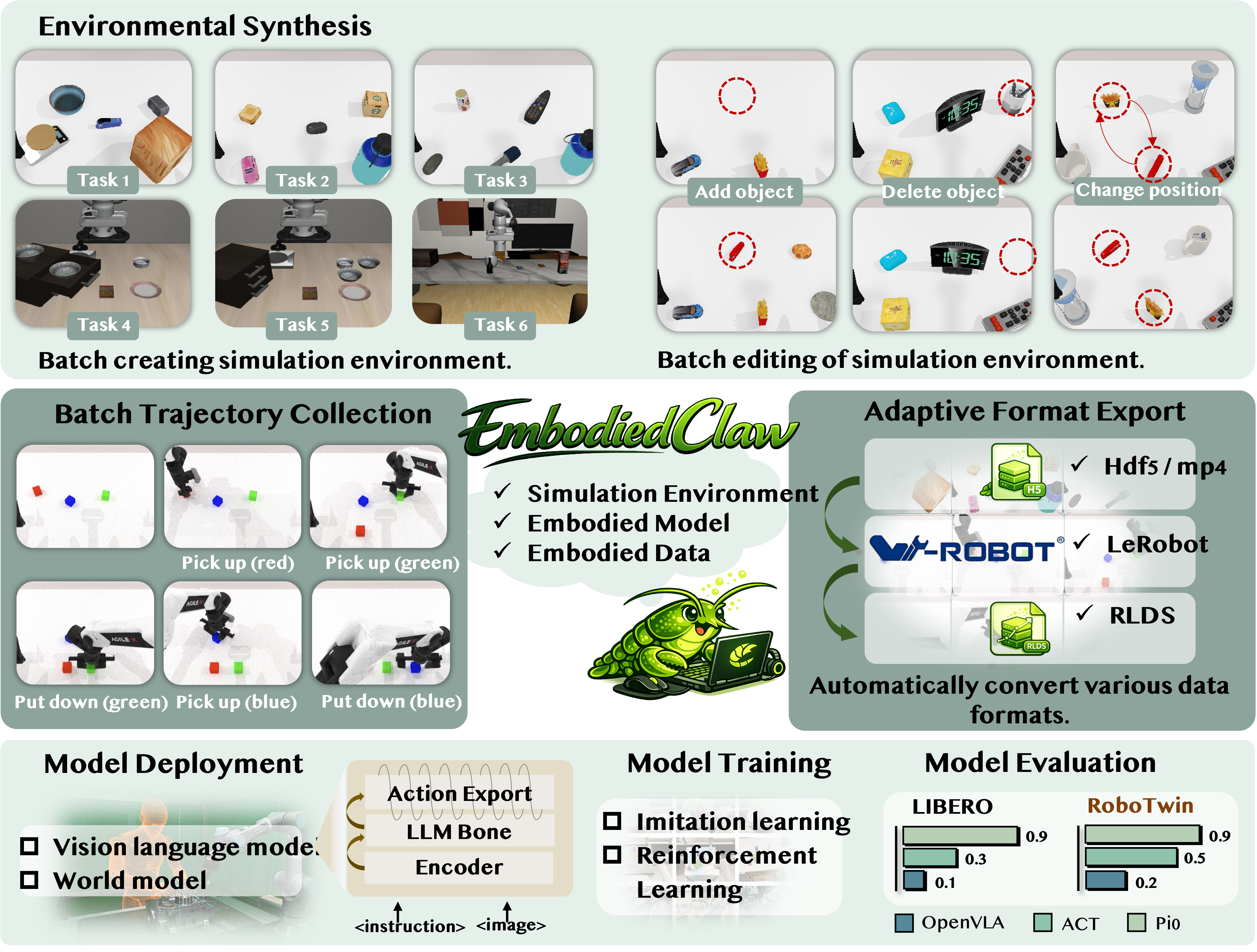
Figure 1: Overview of EmbodiedClaw capabilities across batch simulation and modeling tasks, with adaptive export and training/evaluation workflows.
The architecture adheres to four modules: intent understanding, workflow orchestration, skill-grounded execution, and asset-platform adaptation, supplemented by robust step-wise verification after each skill invocation. Upon receiving user input, the intent module infers operational goals and updates target objects via structured representations, enabling downstream planning. Workflow orchestration leverages a reusable skill library, generating composable skill sequences abstracted from backend realization. Execution grounds abstract skills into platform-specific actions, maintaining a stable interface across heterogeneous environments.
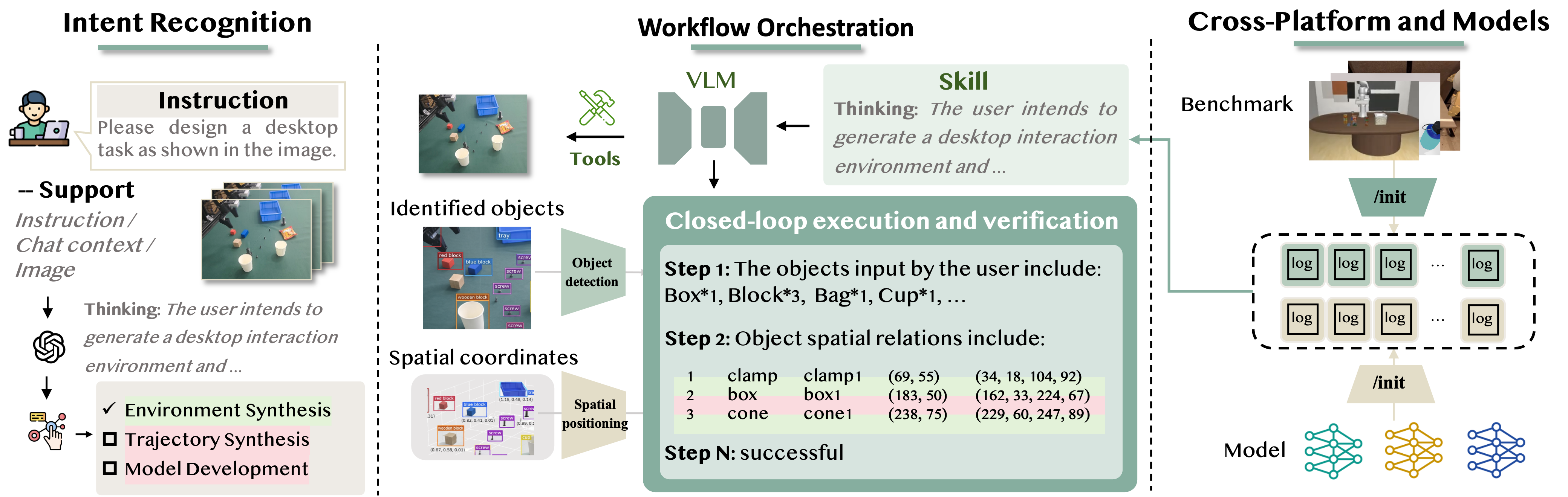
Figure 2: EmbodiedClaw pipeline mapping user requests into intent-aware workflows, with closed-loop verification ensuring reliable execution.
Asset and platform adaptation further decouple workflow semantics from platform-specific detail, supporting registration and ingestion of both in-library and third-party 3D assets, thereby facilitating seamless cross-platform deployment and expansion of valuable embodied resources.
Efficiency and Executability: Empirical Evaluation
To rigorously evaluate EmbodiedClaw, experiments were conducted across four representative embodied AI development tasks: environment synthesis from images, environment revision per user-specified modifications, trajectory synthesis with format conversion, and VLA model evaluation on RoboTwin. Participants included laypersons, experts, Claude Code, and EmbodiedClaw.
Efficiency results indicate substantial improvement, especially in workflows demanding repeated configuration and tool chaining. On simulation-to-data tasks, EmbodiedClaw reduced required time by 88.3% relative to experts (from 200 to 23.4 minutes), and on VLA evaluation, achieved a 39% efficiency gain (reducing completion time from 200 to 122 minutes).
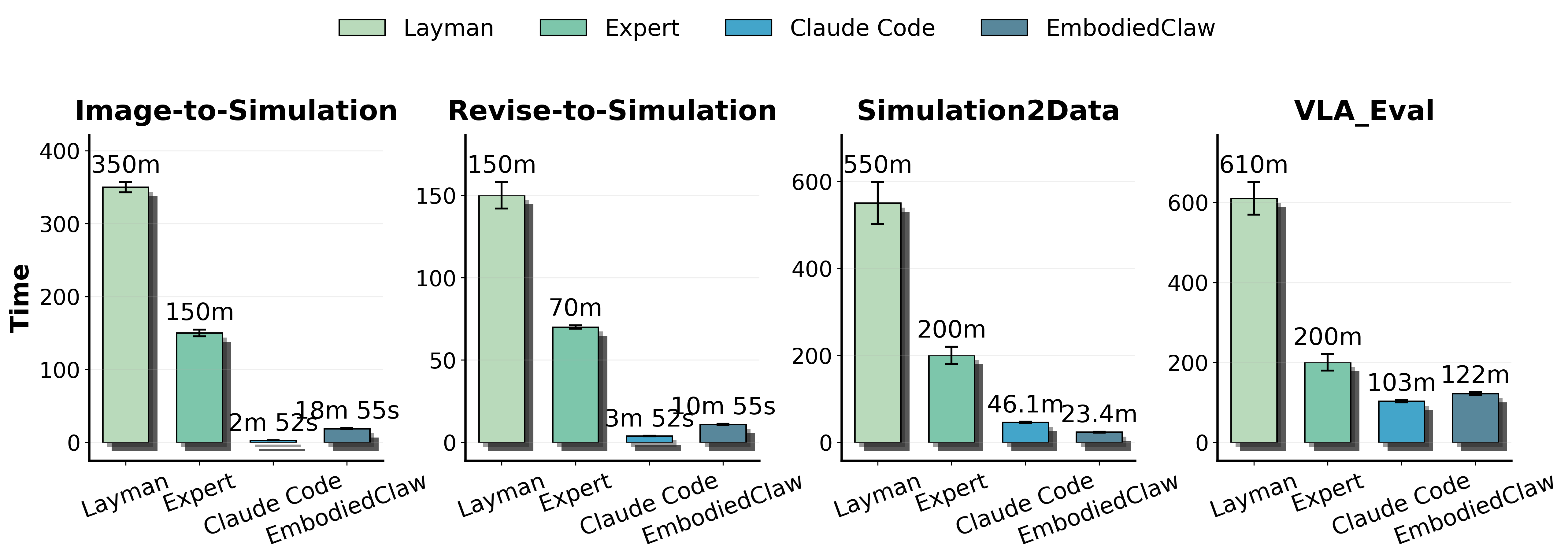
Figure 3: Efficiency comparison across embodied AI development; lower completion time denotes higher efficiency.
Task completion rate analysis demonstrates that EmbodiedClaw achieves accuracy closely approximating expert performance across all evaluated tasks. On simulation-to-data, it attains a completion rate of 0.9; on VLA evaluation, EmbodiedClaw matches experts at 1.0, far outperforming Claude Code and laypersons. These results emphasize the system’s ability to handle multi-stage, dependency-rich workflows reliably.
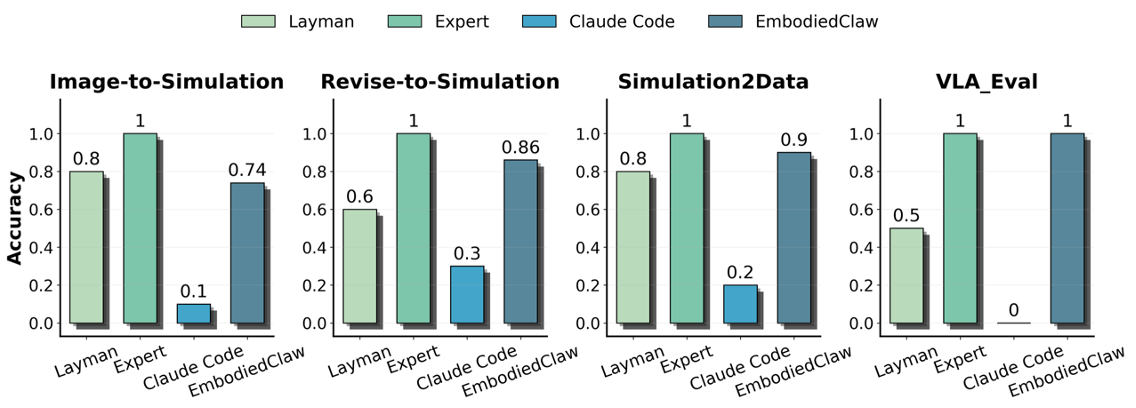
Figure 4: Task completion rate comparison; higher accuracy reflects greater executability.
Case Studies: Workflow Robustness and Generality
Batch environment editing, environment construction and revision, and downstream VLA evaluation exemplify EmbodiedClaw’s broader capabilities. The agent efficiently converts natural-language instructions into executable procedures, reliably inserting objects, modifying viewpoints, and adjusting scene conditions. This robustness extends to multi-stage workflows covering environment preparation, trajectory collection, transformation, model deployment, and evaluation—highlighting the efficacy of intent grounding, skill invocation, and state consistency.
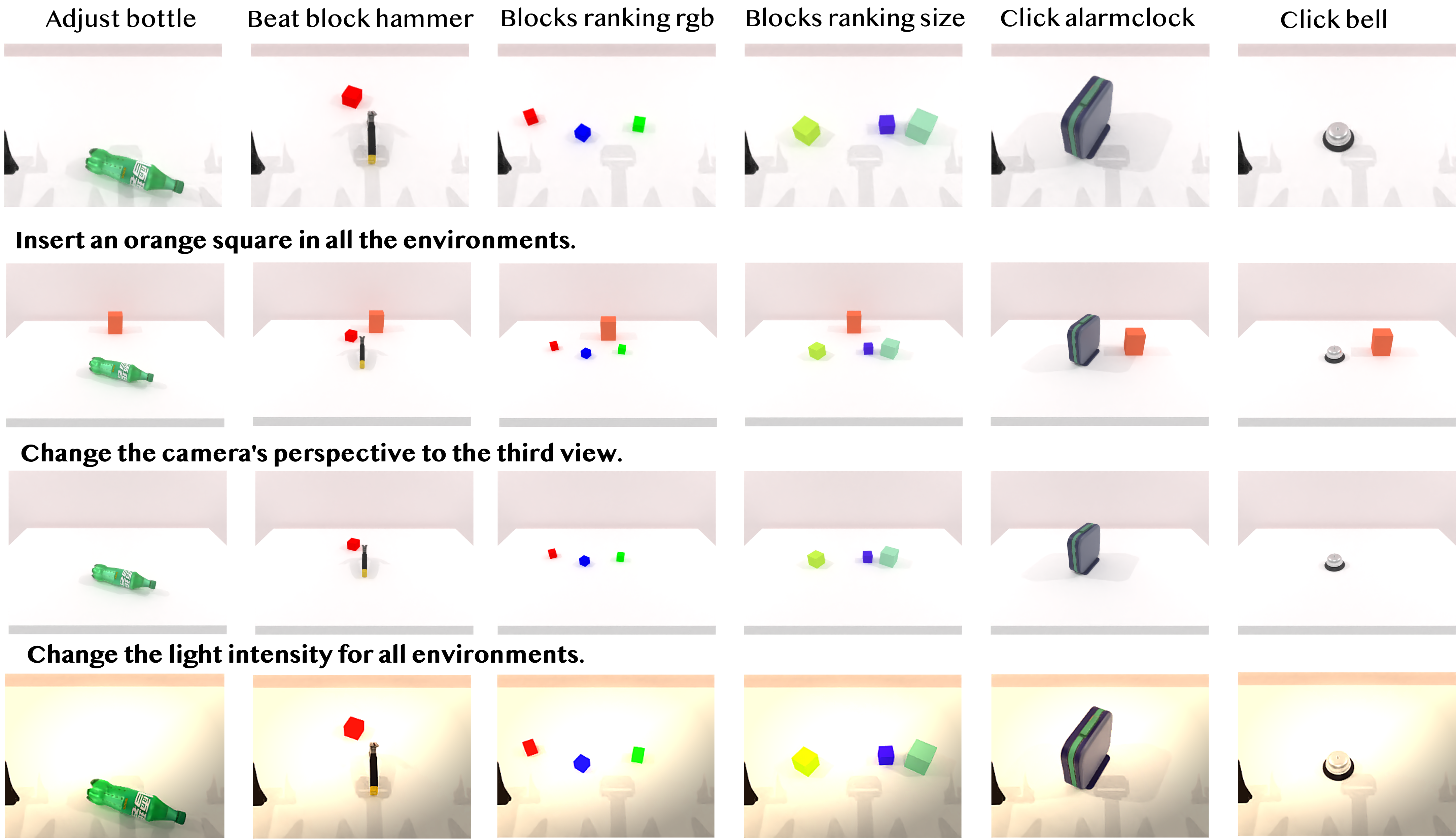
Figure 5: Batch editing of environments from natural-language instructions, demonstrating parallel manipulation abilities.

Figure 6: Environment construction and editing case studies; free-form instructions converted to automated workflows.
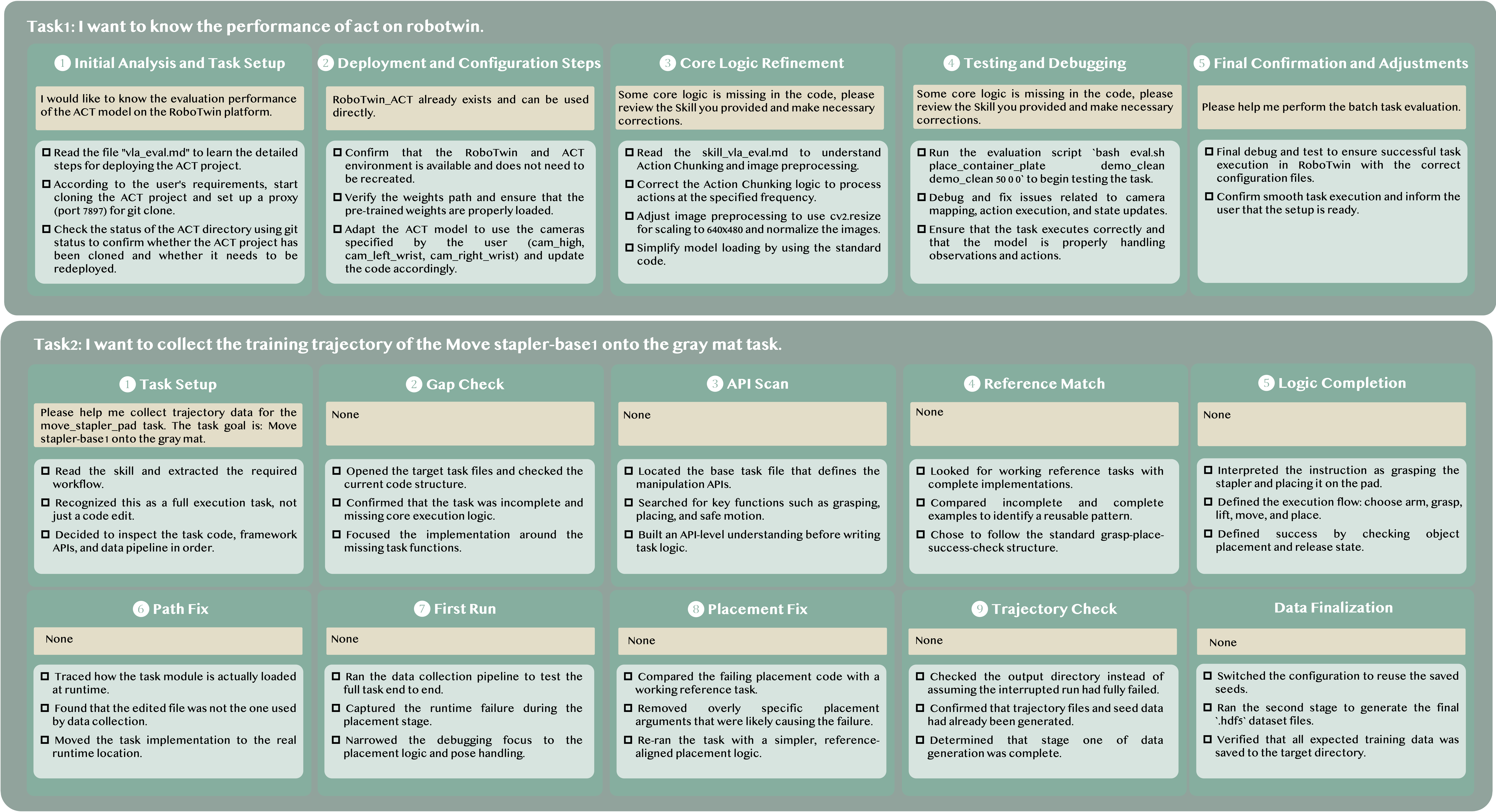
Figure 7: VLA evaluation workflow; execution covers all stages from environment setup to downstream evaluation.
Comparison to Prior Work and Theoretical Implications
Previous automation efforts in embodied AI have targeted isolated pipeline stages, often remaining fragmented and mutually incompatible. EmbodiedClaw’s full-stack design addresses this gap, encapsulating domain-specific knowledge and providing a unified, conversationally driven interface. Compared to general-purpose agentic systems (OpenClaw, CrewAI), EmbodiedClaw retains the requisite expertise in simulator setup, asset handling, and training orchestration, critical for producing valid and reproducible research workflows.
The system's abstraction over intent and operational objects, together with robust workflow validation and asset adaptation, raises the prospect for scalable, reproducible embodied AI research, reducing bottlenecks and velocity constraints in iterative experimentation and model deployment.
Practical and Theoretical Implications, and Future Directions
Practically, EmbodiedClaw increases embodied AI research throughput, compressing days-long engineering workflows into hours, and improving consistency and reproducibility in benchmark-driven experimentation. Theoretically, EmbodiedClaw’s intent-to-workflow mapping advances agentic orchestration methodologies for domain-specific tool integration, encouraging principled separation of semantic planning from platform execution.
Future research may focus on enhancing the intent inference engine using vision-LLMs and large multimodal agents, further automating asset expansion with generative priors, and implementing cross-platform benchmarking that accommodates both simulation and real-world deployment. Prospects also include expanding skill libraries for novel manipulation primitives, and integrating adaptive feedback-driven replanning to address emerging execution failures.
Conclusion
EmbodiedClaw establishes a new paradigm for embodied AI development by automating high-frequency, time-intensive engineering tasks into conversationally driven workflows. Experimental findings confirm significant efficiency gains, improved task completion rates, and robust multi-stage execution, highlighting its suitability for scalable and reproducible embodied research. EmbodiedClaw sets the stage for future explorations in domain-specialized agentic systems that can further systematize and accelerate embodied AI experimentation and deployment.

