- The paper introduces a contraction theory-based approach for synthesizing controllers and observers for SSMs, ensuring exponential stability.
- It leverages LMIs and bi-Lipschitz scaffoldings to guarantee local controllability, observability, and a discrete-time separation principle.
- Numerical results on a nonlinear DC motor system validate the framework's robustness, scalability, and rapid convergence across varying conditions.
Controller Synthesis for Structured State-space Models via Contraction Theory
Overview
The paper "Controller Design for Structured State-space Models via Contraction Theory" (2604.07069) introduces an indirect data-driven controller synthesis approach for nonlinear dynamical systems, leveraging Structured State-space Models (SSMs) as surrogate models. SSMs, particularly those constructed with Linear Recurrent Units (LRU) and bi-Lipschitz nonlinear scaffoldings, offer a tractable, expressive alternative to classical RNNs and kernel-based identification methods. The approach is underpinned by a rigorous contraction analysis, leading to scalable and convex controller and observer synthesis via LMIs.
SSMs in Nonlinear System Identification
SSMs are composed of a discrete-time linear recurrent core enveloped by nonlinear input and output mappings (scaffoldings), formalized as:
xk+1=Axk+BSu(uk),yk=Sy(Cxk+DSu(uk))
where Su and Sy are bi-Lipschitz functions, allowing the preservation of controllability and observability properties in the differential dynamics. SSMs substantially reduce computational complexity compared to Transformer-based architectures, enabling efficient sequence modeling with linear complexity in sequence length.
Controllability and Observability Guarantees
The paper establishes sufficient structural conditions for the local controllability and observability of SSMs. Specifically, if the recurrent unit (A,B) is controllable and Su is bi-Lipschitz, then the SSM is locally controllable. Similarly, observability holds if (A,C) is observable and Sy is bi-Lipschitz. The bi-Lipschitz constants of the scaffoldings govern bounding relations for the resulting discrete-time Gramians, ensuring nonsingularity, and enabling output-feedback controller design without imposing hard structural constraints.
Contraction-based Controller Synthesis
The framework utilizes contraction theory to ensure global exponential stability of the closed-loop system. For the SSM, the key sufficient condition is the existence of LMIs guaranteeing contraction in the variational (differential) dynamics. The state-feedback controller synthesis problem is cast as an LMI, depending only on the bi-Lipschitz constants of Su, producing a static gain K robust to nonlinear scaffoldings. The observer design is dualized via contraction-based metrics, yielding an LMI for a Luenberger-like observer ensuring global asymptotic convergence of state estimates. Both problems reduce to convex semidefinite programs amenable to efficient solution.
Separation Principle for SSMs
A major contribution is the proof that SSMs with bi-Lipschitz scaffoldings admit a discrete-time separation principle: controller and observer designs can be performed independently and combined while preserving global exponential stability of the closed-loop, as formalized via contraction metrics. This property draws a crucial parallel to classical linear systems theory, but is non-trivial in the nonlinear regime. The contraction disturbance lemma provides bounds on Riemannian distances in perturbed dynamics, supporting the theoretical guarantee.
Numerical Results
The paper demonstrates the efficacy of the SSM-based framework in the identification and control of a nonlinear DC motor system subject to friction and dead-zone nonlinearities. SSMs are trained using measured trajectories (corrupted by noise) and the learned model is used for controller and observer synthesis.
A post-training validation trajectory from the SSM is shown, reflecting high fidelity to the real system behavior:
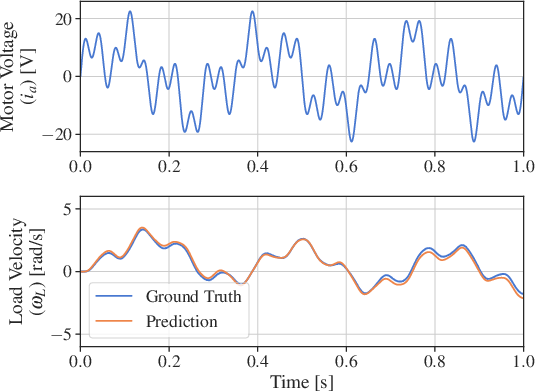
Figure 1: A sample validation trajectory after the training.
Controller and observer performance is tested on the nonlinear mathematical model for multiple initial conditions, exhibiting robust, stable, and rapid convergence characteristics:
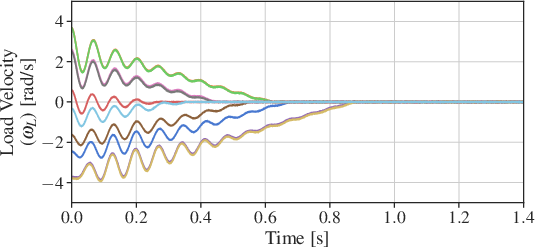
Figure 2: Controller response on the nonlinear mathematical model for different initial conditions.
Quantitative evaluation highlights exponential convergence rates, and the controller's robustness is demonstrated across widely varying initial states.
Implications and Future Directions
The findings have significant implications for data-driven control of nonlinear systems:
- Scalable Synthesis: LMIs leveraging contraction theory enable tractable synthesis for large-scale systems identified via SSMs.
- Guarantees for ML-based SysId: The bi-Lipschitz property as a sufficient guarantee bridges the gap between ML-based identification and rigorous controller synthesis.
- Generalizability: The separation principle fosters modular design, supporting plug-and-play observer and controller synthesis as in linear systems.
Theoretical advances suggest the possibility of extending contraction-based synthesis to deeper SSM architectures and incorporating internal model principles for rejection of structured disturbances. Practical directions include robust output-feedback control in unstructured environments and further integration with foundation models for adaptive control.
Conclusion
This paper provides a comprehensive framework for the synthesis of controllers and observers for nonlinear systems identified via Structured State-space Models. Leveraging bi-Lipschitz scaffoldings and contraction theory, the approach ensures scalability, interpretability, and rigorous stability guarantees via LMIs, establishing an operational separation principle in the nonlinear regime. The methodology exhibits strong numerical results and opens avenues for scalable, theoretically sound integration of ML-based models and advanced control synthesis in dynamical systems.

