- The paper introduces a rig-aware 3D reconstruction pipeline that uses Gaussian splatting to generate photorealistic vehicle undercarriage models.
- It employs precise calibration with ChArUco boards and adaptive video synchronization to overcome wide-angle distortion and low-parallax challenges.
- The method achieves high photometric fidelity (PSNR 30.66 dB, SSIM 0.92) and real-time rendering (>130 FPS) for interactive vehicle inspections.
Rig-Aware 3D Reconstruction of Vehicle Undercarriages using Gaussian Splatting
Introduction
The paper "Rig-Aware 3D Reconstruction of Vehicle Undercarriages using Gaussian Splatting" (2601.14208) advances the state of automated vehicle inspection by introducing a robust, efficient pipeline for reconstructing interactive 3D models of vehicle undercarriages. Centered on a three-camera rig with extreme wide-angle lenses, the system tackles domain-specific challenges such as severe lens distortion, low parallax, and spatial-temporal alignment, culminating in photorealistic reconstructions via 3D Gaussian splatting. This approach enables detailed remote inspections, facilitating defect identification (e.g., rust, leaks), improving operational safety, and enhancing transparency for online automotive marketplaces.
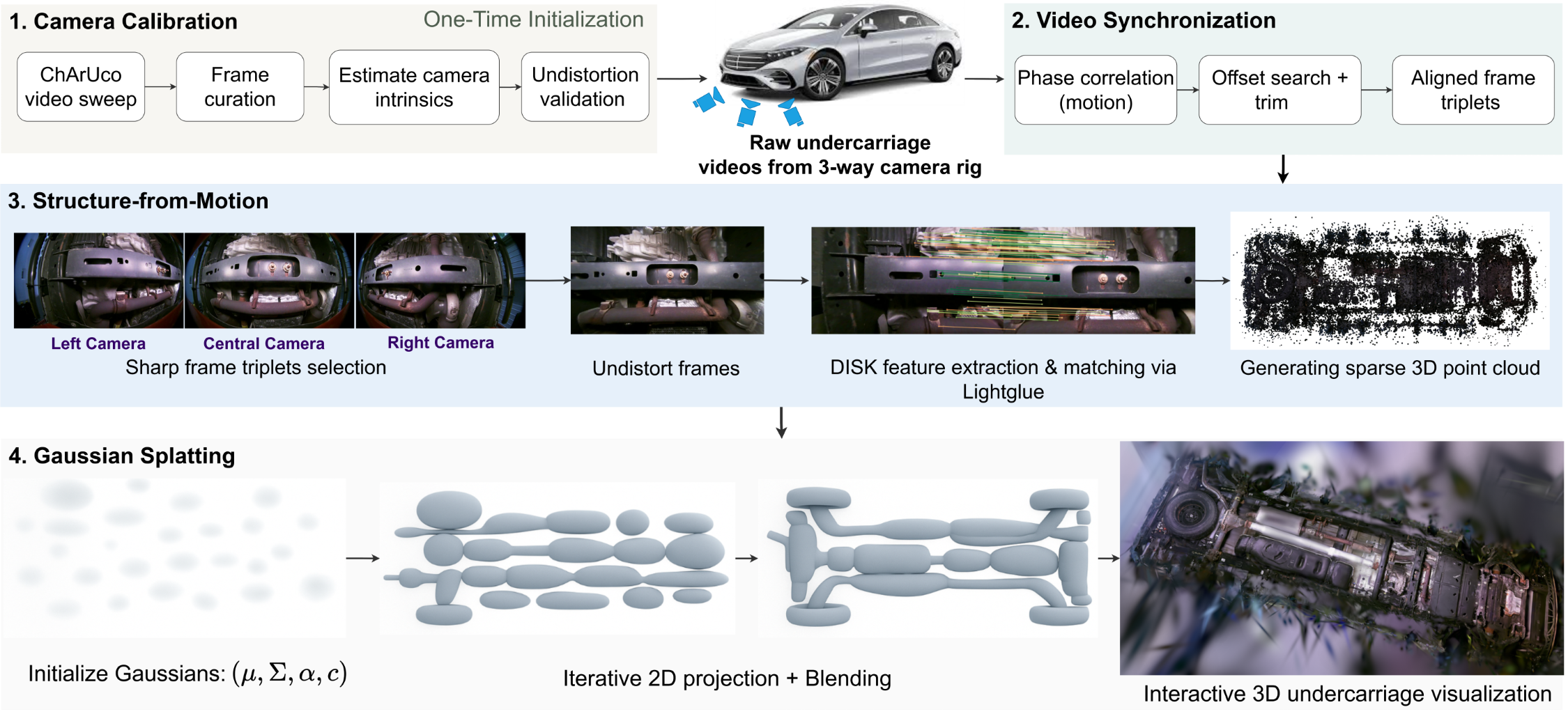
Figure 1: End-to-end 3D reconstruction pipeline—from calibration and synchronization to SfM and real-time Gaussian splatting.
Technical Contributions
Precise Camera Calibration
Critical to geometric fidelity, the system begins with a one-time, high-precision calibration using a ChArUco board. By fitting an eight-parameter Full OpenCV distortion model and leveraging robust sub-pixel corner detection, the pipeline quantifies and rectifies severe wide-angle distortions. The calibration process greatly lowers RMS reprojection error, ensuring subsequent SfM accuracy.
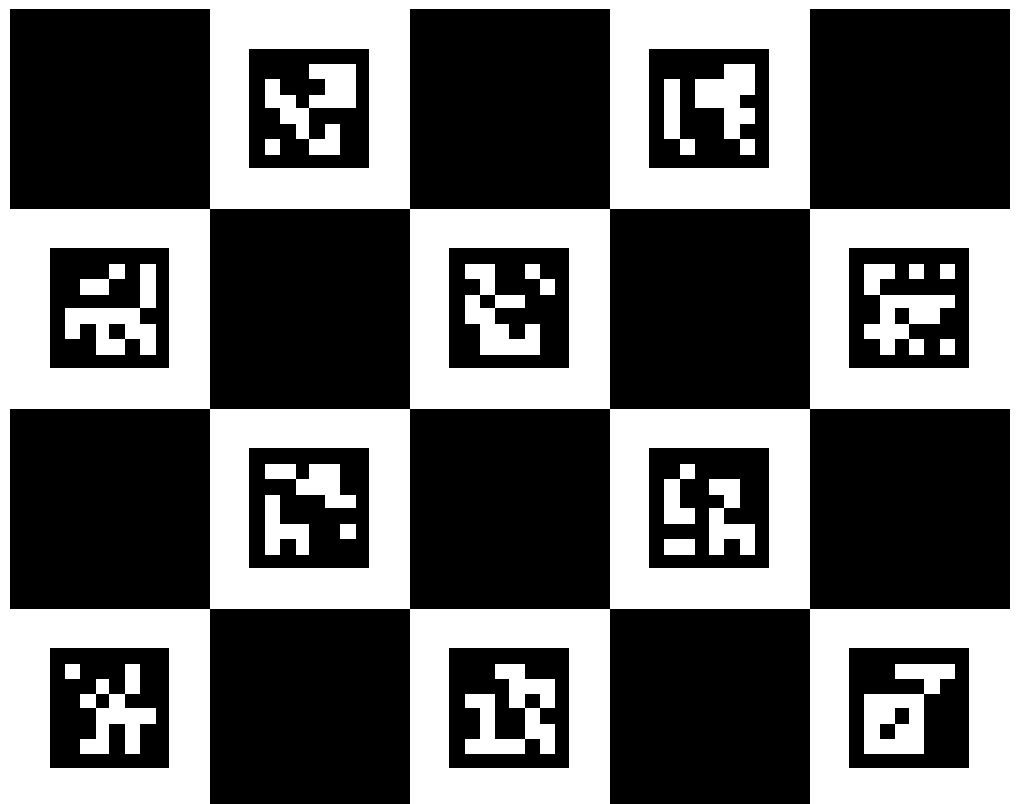
Figure 2: ChArUco board used for accurate camera intrinsic calibration.
Evaluation shows that undistortion is essential:
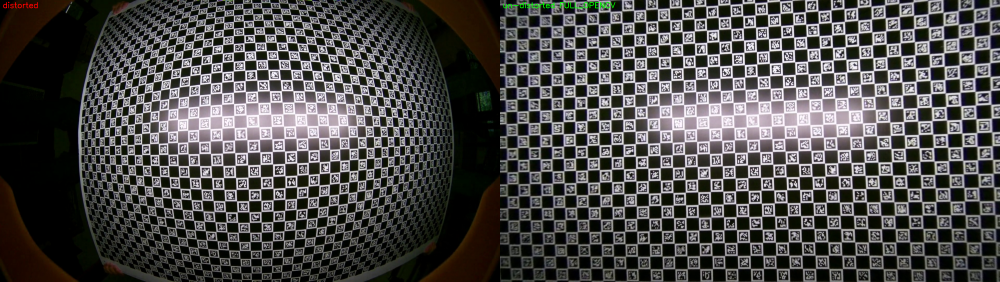
Figure 3: Left: raw calibration image; Right: undistorted image using Full OpenCV model.
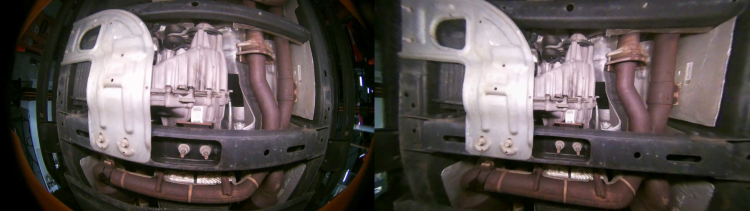
Figure 4: Left: raw undercarriage image; Right: undistorted image using Full OpenCV model.
Video Synchronization
Hardware triggers cannot eliminate multi-camera latency; consequently, temporal misalignment must be corrected via global vertical motion estimation and adaptive offset optimization. The pipeline employs phase correlation and L1 loss minimization for millisecond-level synchronization, producing well-aligned sequences necessary for reliable multi-view geometry.
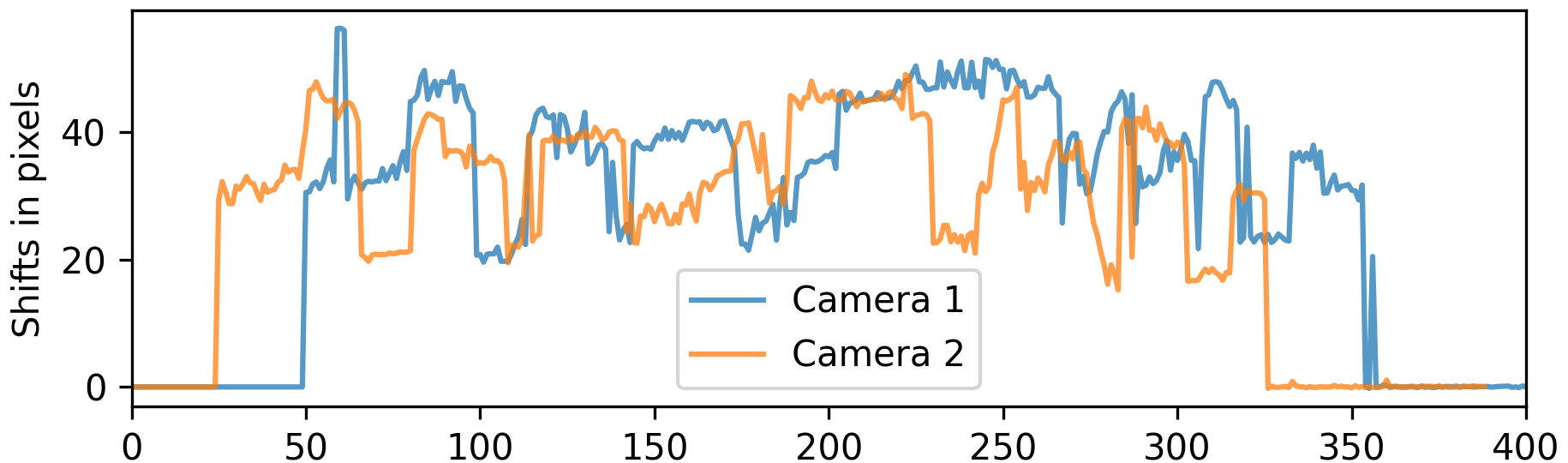
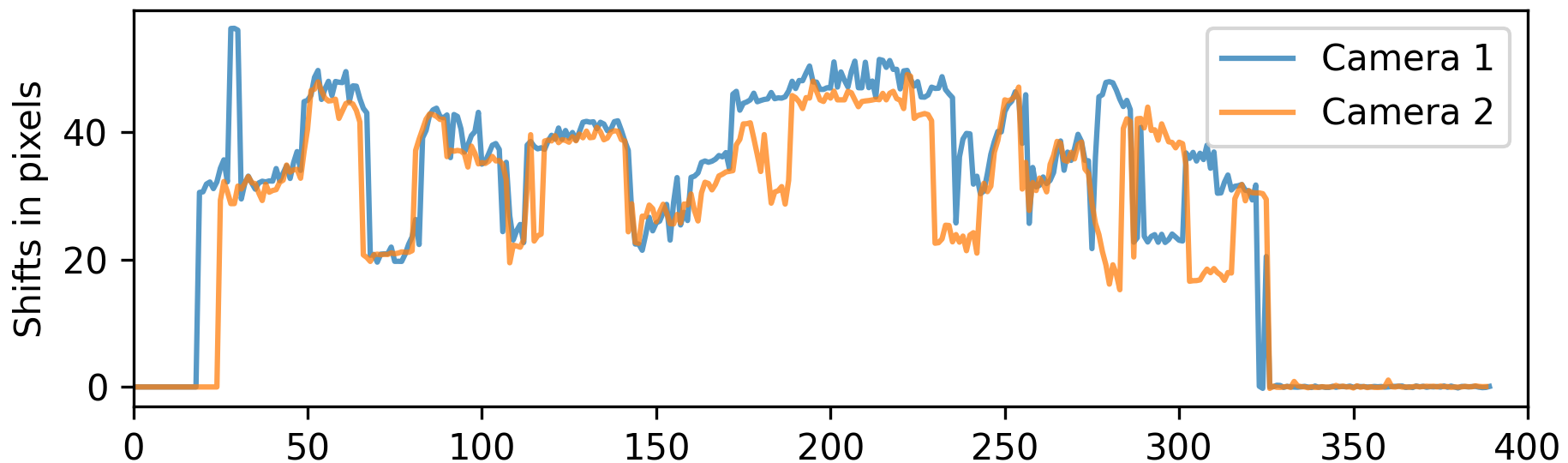
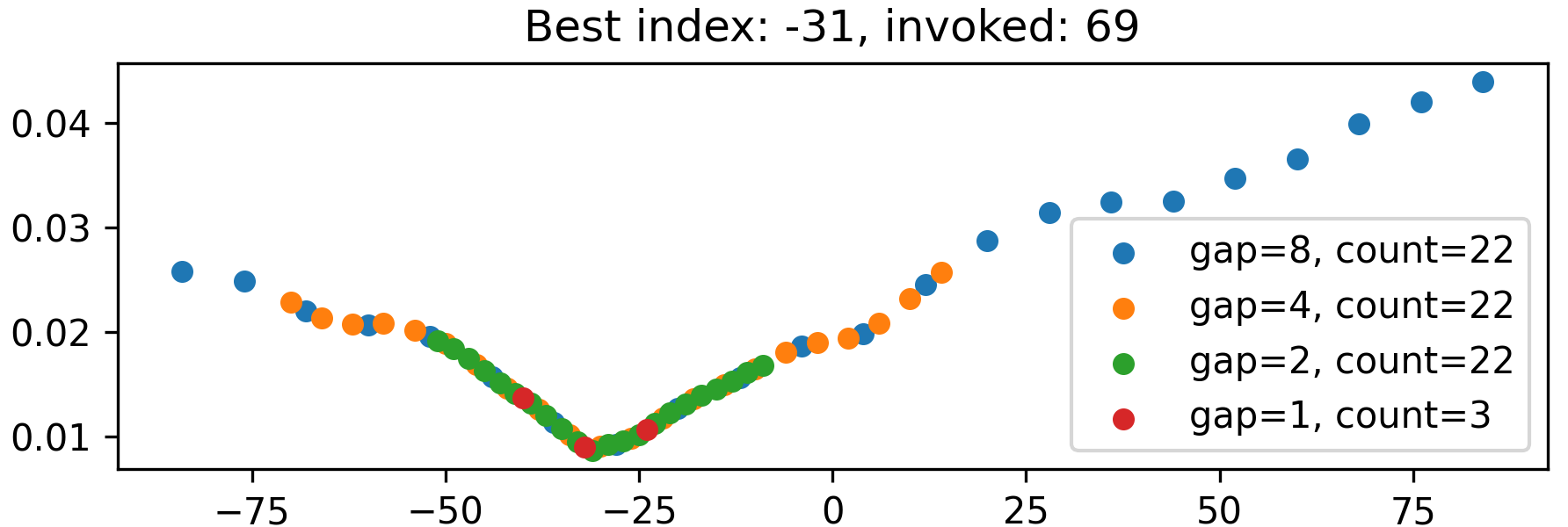
Figure 5: Vertical motion shift curves for unsynchronized videos.
Rig-Aware Structure-from-Motion
Frame Selection and Feature Extraction
To maximize scene sharpness and minimize motion blur, the system samples triplets of the sharpest frames using Laplacian variance scoring. The images undergo CLAHE preprocessing, substantially boosting detectable features in underexposed regions.
A learned descriptor, DISK, is adopted for feature extraction in challenging undercarriage scenes; this is paired with LightGlue, an attention-based matcher, to robustly compute correspondences even under extreme distortion and repetitive scene structure.
Constrained Feature Matching and Geometric Priors
Feature matching is efficiently limited to spatiotemporally proximate frame pairs and stereo baselines suitable for the rig configuration. The pipeline omits impractical cross-baseline matchings and employs COLMAP for geometric verification. Critically, bundle adjustment incorporates explicit rig priors on inter-camera translation, mitigating drift and degenerate solutions under low parallax.

Figure 6: Dense sparse point cloud representing vehicle undercarriage geometry.
Ablation results highlight the necessity of each component. Removal of calibration, custom matching, or priors consistently produces noisy or incomplete reconstructions.
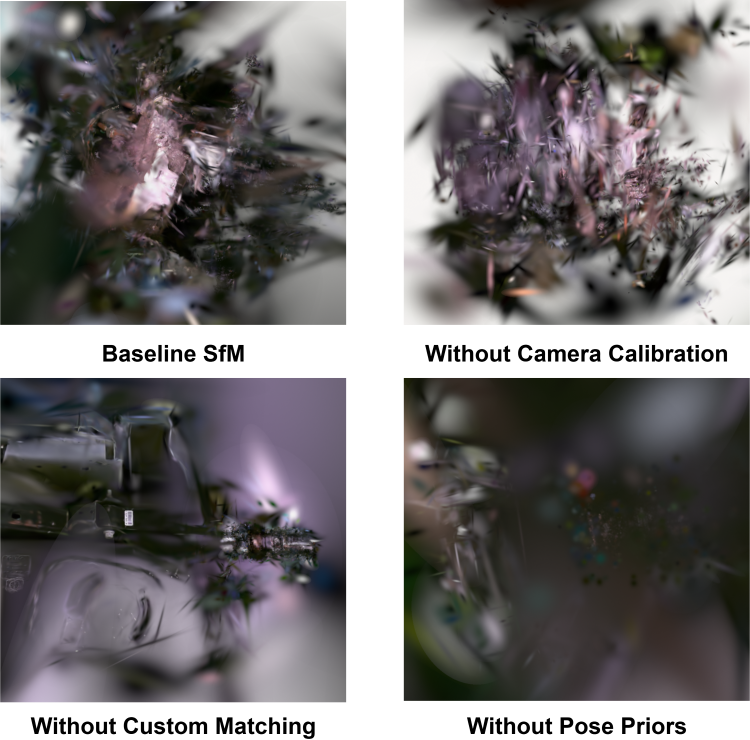
Figure 7: Degenerate, noisy renders result from omitted calibration, matching, or pose prior components.
3D Gaussian Splatting and Rendering
Gaussian splatting explicitly models the scene using optimized anisotropic 3D Gaussians, enabling radiance field rendering at interactive rates. The point cloud from rig-aware SfM initializes means, with spherical harmonics for color and covariance adapted to local density. The optimization converges efficiently, leveraging the geometric accuracy of the SfM priors.
Resulting models exhibit strong photometric fidelity (mean PSNR 30.66 dB, SSIM 0.92, LPIPS 0.19) and real-time rendering performance (>130 FPS). Diagnostic features, including rust patterns, bolt heads, and fluid marks, are consistently resolved.

Figure 8: Gaussian splat render—fine-grained diagnostic texture, significant rust accurately captured.
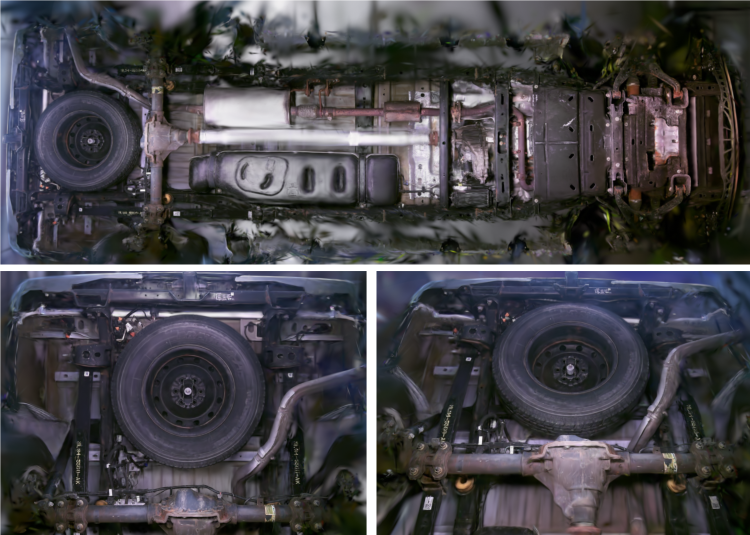
Figure 9: Photorealistic 3D undercarriage model—multiple perspectives reveal comprehensive geometry and details.
Practical and Theoretical Implications
This methodology directly enables reliable, interactive undercarriage inspections in online marketplaces, supporting transparency and informed purchasing decisions. The approach sets a computational benchmark for real-time visual inspection, paving the way for automated damage detection, longitudinal fleet monitoring, and scalable insurance claim evaluation.
Theoretical contributions include the integration of strong physical priors into multi-view geometry under extreme conditions and the establishment of a reproducible pipeline for SfM-seeded explicit radiance field optimization. The demonstrated fusion of learned matchers and constrained correspondence strategies suggests extensions into other domains with low-parallax, wide-angle capture geometries.
Future research avenues include automating condition assessment via multimodal learning (e.g., defect segmentation), generalizing the pipeline for arbitrary industrial inspection scenarios, and integrating uncertainty quantification in the geometric reconstruction and rendering stages.
Conclusion
The rig-aware pipeline for 3D vehicle undercarriage reconstruction exemplifies effective synergy between calibrated multi-view geometry, robust learned feature matching, and efficient explicit radiance modeling. Achieving superior real-time, interactive renderings, the system not only fulfills practical requirements of remote automotive inspection but also provides a blueprint for robust 3D reconstruction in challenging environments. Extensions of this work could transform automated inspection across domains, leveraging both geometric and photometric precision for condition assessment and anomaly detection.