- The paper presents a novel framework that applies active matter physics to bio-inspired robophysics, demonstrating enhanced adaptability in individual and collective robotic behavior.
- It employs reinforcement learning to enable real-time, decentralized decision-making, optimizing communication and task sharing among robotic swarms.
- The approach bridges physics, robotics, and biology to inspire designs for autonomous exploration, disaster response, and environmental monitoring.
Active Matter as a Framework for Living Systems-Inspired Robophysics
Introduction
The paper "Active Matter as a framework for living systems-inspired Robophysics" (2511.14624) explores the integration of active matter principles with Robophysics. Robophysics, a discipline concerned with the physical laws governing robotic systems, faces challenges in effectively mimicking the efficiency and adaptability seen in biological organisms both in individual locomotion and collective swarm behaviors. This essay outlines how principles derived from living systems are employed to inform the design and control of robotic collectives, utilizing insights from active-matter physics and biology.
Learning from Living Systems: Single Robot
At the level of individual robotic units, Robophysics advances by simplifying and abstracting the locomotor mechanics observed in biological entities. Examples such as snake-like robots, which use segmental propulsion to navigate complex terrains, and bird-inspired drones with optimized flapping-wing dynamics, illustrate how bio-inspired design enhances adaptability and energy efficiency. These models serve as experimental systems that offer profound insights into navigating non-equilibrium environments, much like living organisms.
Collective Behavior in Robophysics
In collective behaviors, living systems achieve coordination through decentralized interactions that foster robust adaptability and resilience. Such principles translate into robotic swarms through processes like communication, coordination, cooperation, and resource management.
Communication: An integral challenge is optimizing the amount and kind of information shared among robots to enhance collective performance without overwhelming the network with data. The feedback loop between communication and collective dynamics in robotic swarms inspires new models for information exchange.
Coordination and Scalability: The scalability of coordinated tasks, such as path synchronization and formation maintenance, remains a crucial challenge in Robophysics. Living systems provide models for local rule-based interactions that facilitate emergent collective behavior amid fluctuating environmental conditions.
Cooperation and Task Sharing: Inspired by natural processes, robotic collectives engage in task-sharing collaborations, optimizing resources for tasks that require joint effort and diverse capabilities, such as combined aerial and underwater reconnaissance.
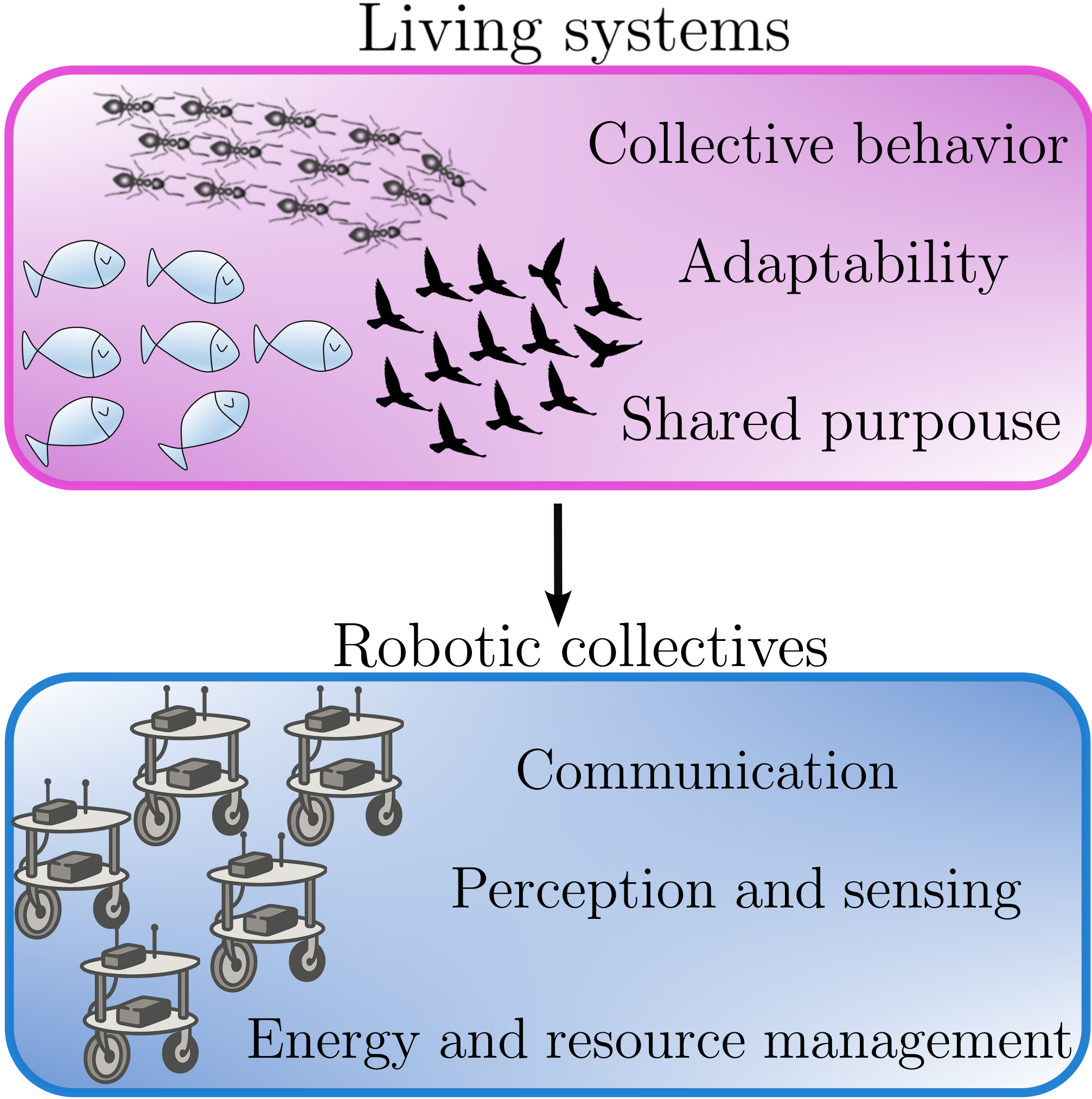
Figure 1: Schematic illustration of how principles from living systems can inform robophysics, with multi-robot swarms addressing real-world challenges.
Active Matter for Synthetic and Living Systems
Active matter provides a valuable framework for modeling collective behaviors by incorporating self-propelled agents that exert force on their environment. Recent research aims to bridge the gap between passive emergent phenomena and purposeful behavior seen in biological collectives. The integration of machine learning methods advances this effort by introducing adaptability and purpose-driven dynamics into active matter systems.
Machine Learning and Control Systems
Machine learning, specifically reinforcement learning (RL), is increasingly applied to active matter structures, enabling the design of robotic systems that learn and adapt through trial and error. RL algorithms train swarms to respond to changing environmental stimuli, akin to the adaptive behaviors in biological entities. These methodologies enhance the capacity for real-time, decentralized decision-making, critical for achieving the resilience and functionality observed in living systems.
Conclusion
The paper highlights the potential for leveraging active matter principles to enrich Robophysics with insights from living systems, ultimately driving innovations in robotic collective behavior. This interdisciplinary approach, combining physics, robotics, and machine learning, seeks to create robotic swarms capable of real-world adaptability and resilience. By embedding shared objectives into their design, robotic swarms may soon replicate the coordination and adaptability of biological systems, leading to advances in fields like autonomous exploration, disaster response, and environmental monitoring.
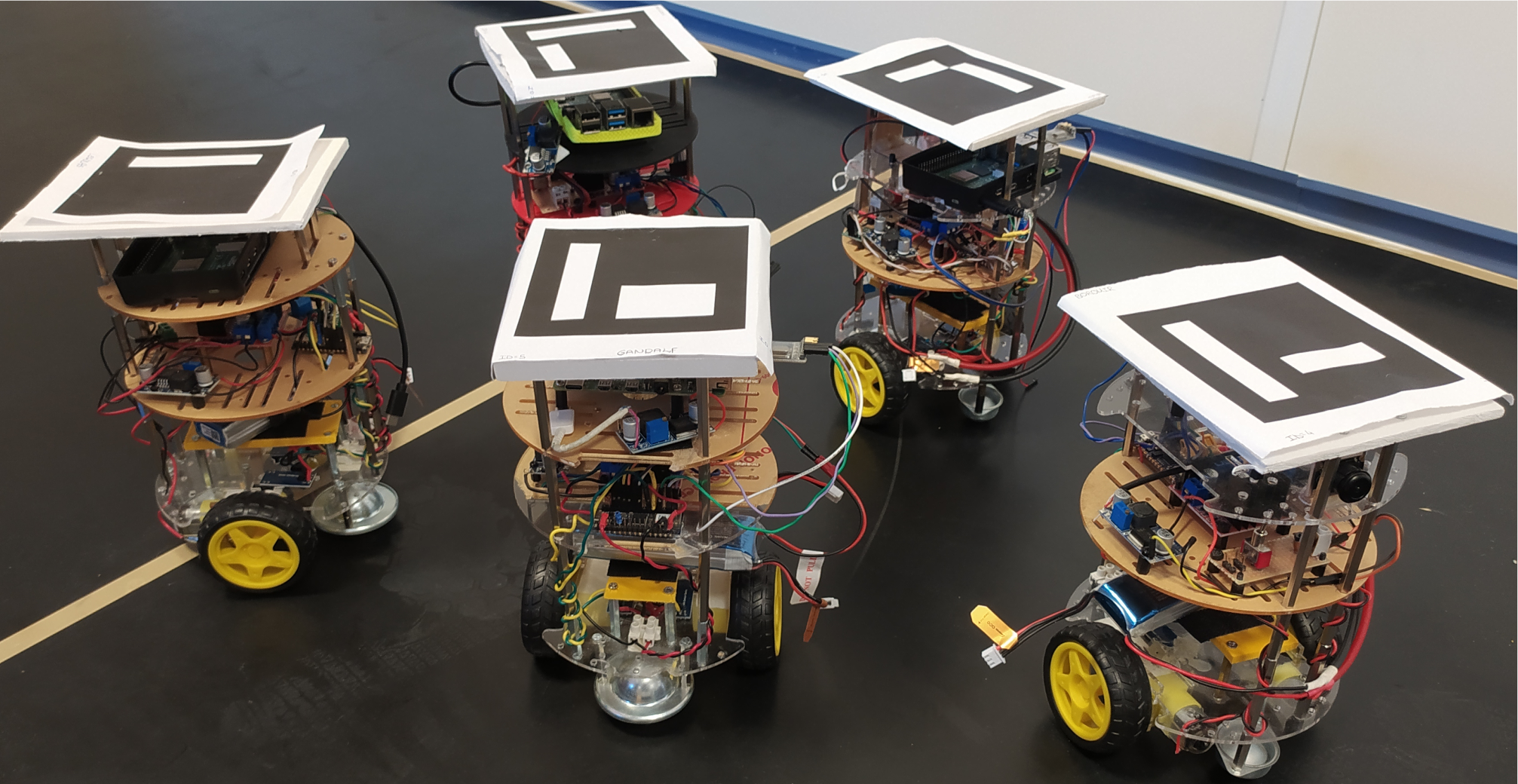
Figure 2: Group of five differential robots from the Robotarium-UCM, exemplifying current strides in robotic swarm experiments.