- The paper introduces GRASPion, a fully programmable open-source brainbot platform that overcomes prior limitations to enable controlled studies of individual and collective active matter behaviors.
- It details a modular design with 3D-printed components, advanced onboard electronics, and sensor integration, allowing precise experiments in chiral motions, diffusive dynamics, and synchronization.
- Key experimental results include reproducible trajectory control with minimal drift and a validated transition from ballistic to diffusive motion, highlighting its practical applicability.
GRASPion: An Open-Source, Programmable Brainbot for Active Matter Research
Introduction and Motivation
The paper introduces GRASPion, a compact, open-source bristlebot platform designed to advance experimental research in active matter. Active matter systems, characterized by self-propelled agents exhibiting out-of-equilibrium collective dynamics, have become a central topic in statistical physics, robotics, and computational science. Existing bristlebot platforms have provided valuable insights but are limited by constraints in programmability, sensor integration, and reproducibility. GRASPion addresses these limitations by combining modular mechanical design, advanced onboard electronics, and open-source firmware, enabling controlled studies of both individual and collective behaviors in active matter.
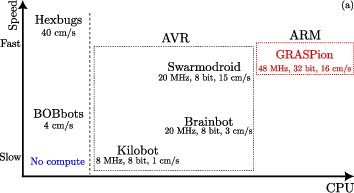
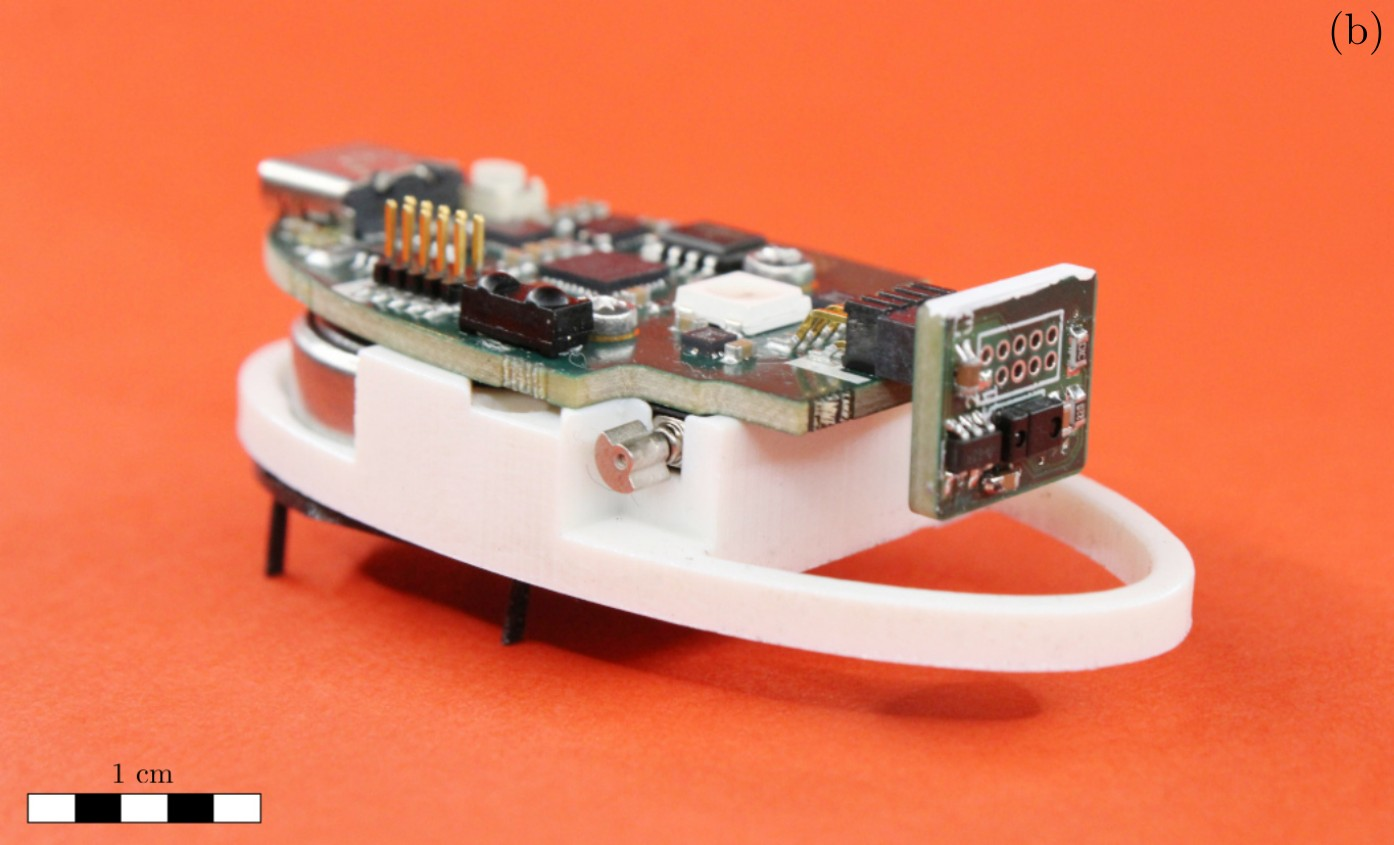
Figure 1: Evolution of speed and processing power in bristlebot platforms (top), and a photo of the GRASPion robot (bottom).
Mechanical and Electronic Architecture
Mechanical Design
GRASPion features an ellipsoidal chassis (60 × 30 × 15 mm³, 17 g total mass) fabricated via 3D printing with ABS and PLA components. The modular design allows rapid prototyping and customization, including modifications for symmetry breaking, chirality, and physical interconnections. Locomotion is achieved through four PLA legs, whose geometry and pitch angle (12°) are critical for optimizing frictional propulsion and trajectory control. The legs are attached via a replaceable leg-plate and wedge, facilitating maintenance and experimental variation.
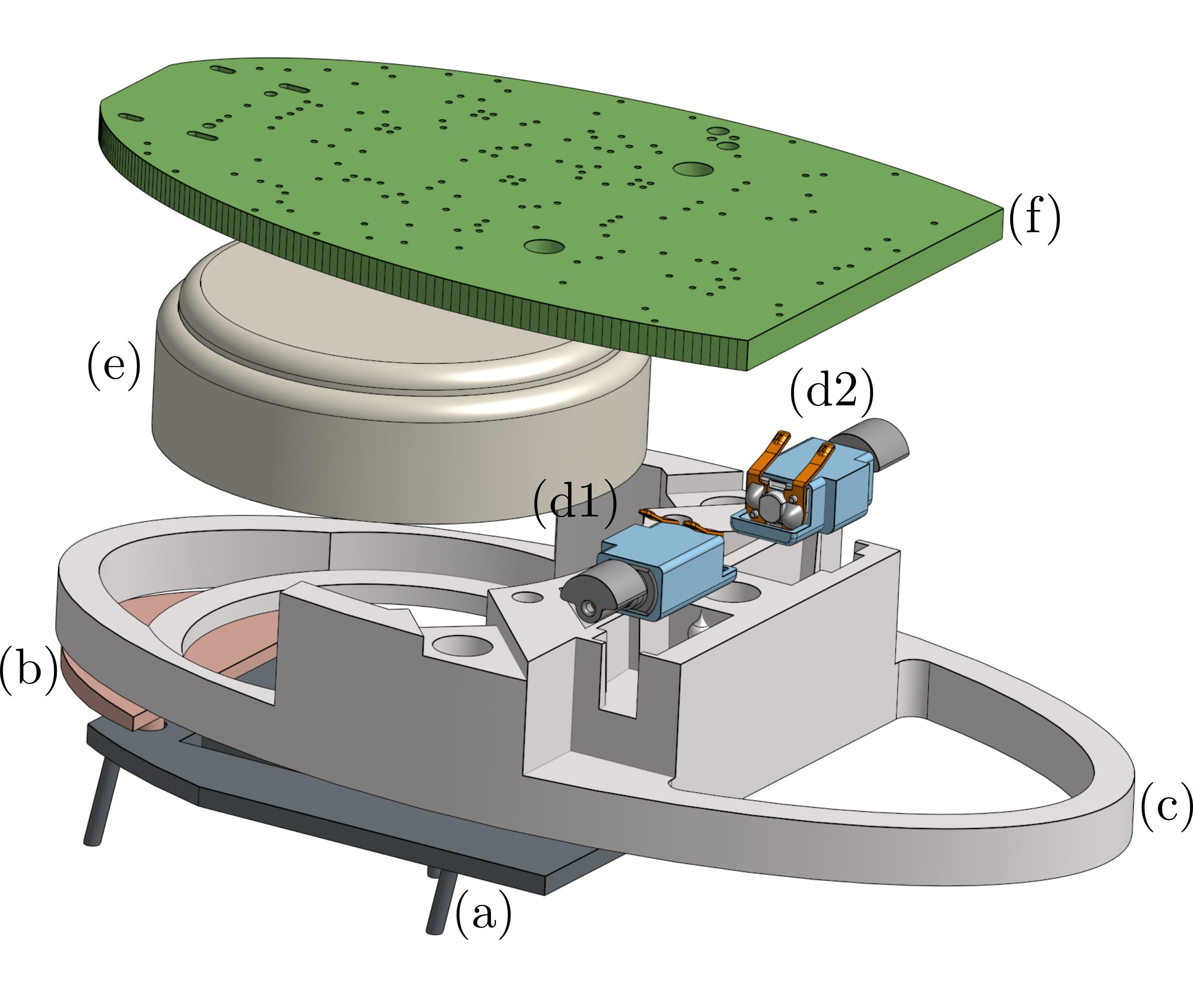
Figure 2: Exploded view of GRASPion components, highlighting the modular mechanical assembly.
Electronic System
The robot is powered by a rechargeable lithium-ion battery and actuated by two independent vibration motors (VZ3TH8B171700L), which are replaceable via spring contacts. The control system is built around an Adafruit QtPy SAMD21 clone (ARM Cortex M0+), with a dedicated AVR coprocessor (AVR32DD20) handling low-level operations such as charging and IR communication. The circuit integrates a suite of sensors: IR receiver/transmitter, 3-axis magnetometer, dual Neopixel RGB LEDs, ambient light sensor, and a customizable front module (APDS-9960) for proximity, color, and gesture detection. The modular sensor interface supports future expansion, including Bluetooth connectivity.
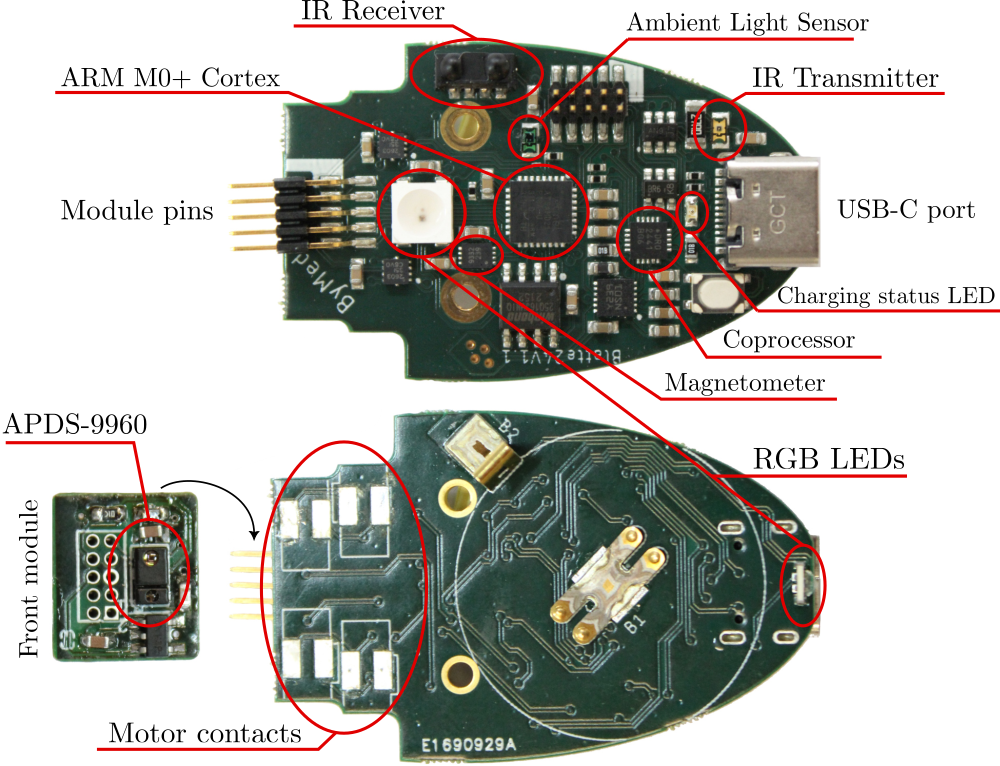
Figure 3: Top and bottom views of the GRASPion circuit board, showing processor, sensor interfaces, and motor contacts.
Software and Programmability
GRASPion is fully programmable via the Arduino IDE, leveraging standard C++ libraries. The firmware architecture exposes direct control over motor drivers and sensor data streams, enabling real-time decision-making and adaptive behaviors. Bulk flashing and USB charging support scalable deployment in laboratory settings. The open-source repository provides comprehensive documentation, example code, and configuration guides, facilitating rapid adoption and customization.
Experimental Use Cases
Remote Control and Chiral Motion
The IR receiver enables remote control using standard IR remotes. Motor actuation functions (buzCw, buzCcw) allow precise control of turning behavior, enabling studies of chiral motion and programmable active particles. Empirical data demonstrate consistent rotational trajectories with minimal drift (~5 mm), supporting reproducible experiments on chiral dynamics.
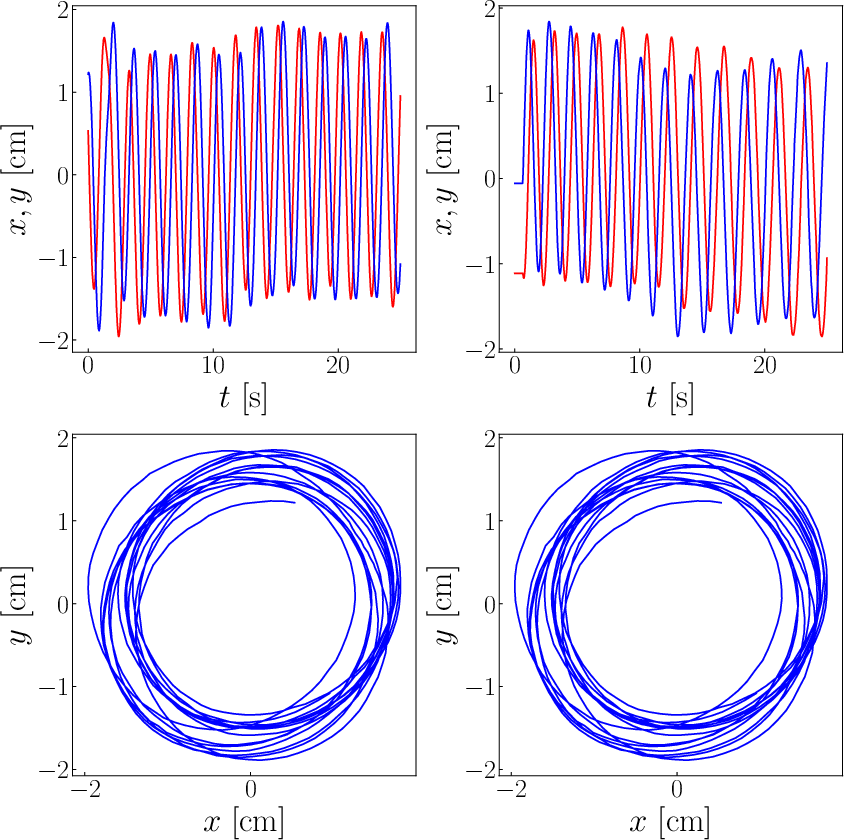
Figure 4: Bot center-of-mass coordinates and $xy$ trajectories during clockwise and counter-clockwise turns.
Diffusive and Ballistic Motion
A diffusive motion algorithm is implemented by alternating straight and turning phases with randomized durations. The random seed is derived from analog sensor input, ensuring stochasticity. Trajectory analysis reveals a clear transition from ballistic (MSD∼t2) to diffusive (MSD∼t) regimes, validating the platform's suitability for studies of active Brownian motion and transport phenomena.
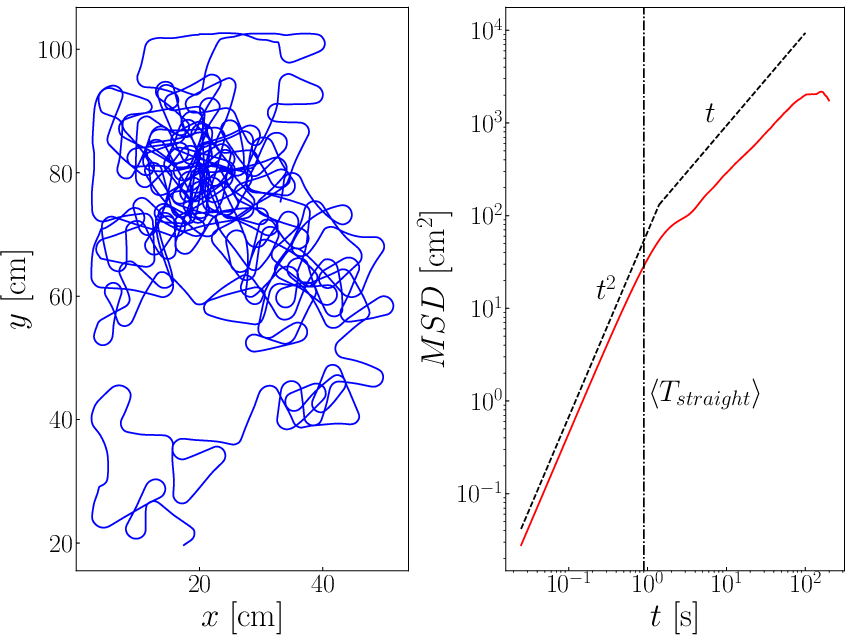
Figure 5: Sample trajectory and mean square displacement of a bot executing the diffusive algorithm, illustrating ballistic-to-diffusive transition.
Synchronization and Swarmalator Dynamics
The platform supports implementation of interaction protocols, exemplified by a discrete Kuramoto synchronization experiment. Bots cycle through six discrete color phases, with frequency adaptation governed by detected external color signals. The coupling law ωt+1=ωt+Ksin(ϕ−ϕd) enables phase and frequency synchronization, as demonstrated in two-bot experiments. This establishes GRASPion as a viable testbed for emergent phenomena such as swarmalators and collective oscillators.
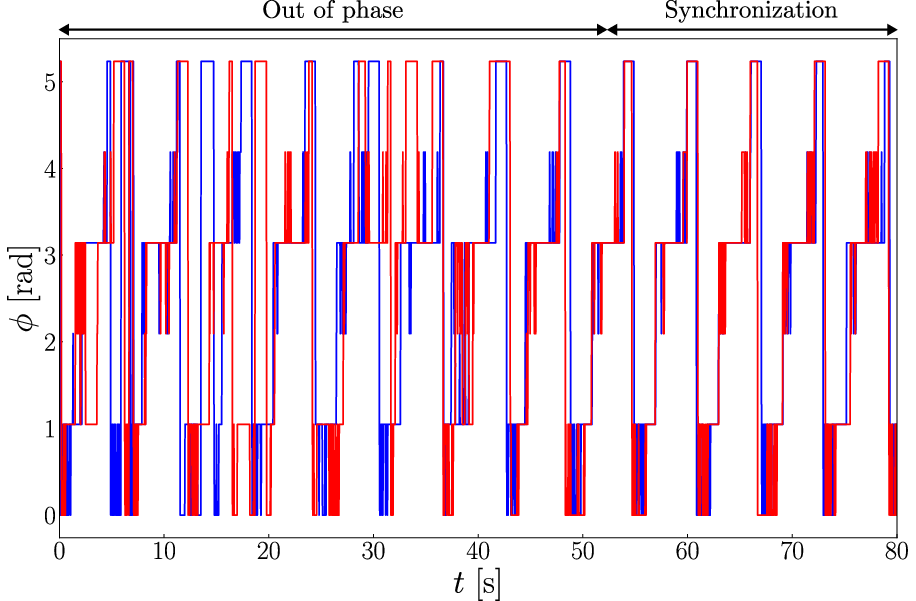
Figure 6: Phase synchronization of two bots via discrete Kuramoto coupling, showing convergence in phase and frequency.
Implications and Future Directions
GRASPion's open hardware and software architecture enables the emulation of a wide range of interaction laws, from classical alignment and repulsion to non-reciprocal couplings. The platform's scalability, sensor integration, and programmability position it as a model system for experimental studies in smart active matter, distributed learning, and adaptive swarm control. The ability to implement arbitrary interaction protocols facilitates exploration of exotic collective behaviors, metamaterials, and intelligent robotic ensembles.
Theoretical implications include the capacity to probe statistical mechanics of active systems, test thermodynamic engine concepts in active matter, and investigate predator-prey and synchronization dynamics. Practically, GRASPion lowers the barrier to entry for experimental research and education, supporting reproducible, high-throughput studies and rapid prototyping of new collective behaviors.
Conclusion
GRASPion represents a robust, versatile, and accessible platform for active matter research, bridging statistical physics, robotics, and computational intelligence. Its modular design, advanced sensor suite, and open-source programmability enable controlled studies of both individual and collective dynamics, supporting the development of new experimental paradigms in emergent behavior and intelligent swarms. The platform's flexibility and scalability will facilitate future advances in active matter physics, collective robotics, and distributed AI systems.