- The paper introduces a computational framework integrating 3D-printed bone structures with LCE actuators for untethered, infrared-stimulated robot control.
- It demonstrates simulation-driven optimization of skeletal designs and locomotion gaits, with models like morph-bot achieving up to 33% contraction.
- The research provides insights into replicating natural musculoskeletal adaptability to advance autonomous, environment-responsive robotic systems.
Summary of "Computational Design and Fabrication of Modular Robots with Untethered Control"
The paper "Computational Design and Fabrication of Modular Robots with Untethered Control" (2508.05410) presents a novel framework for designing and controlling robots that mimic the distributed actuation capabilities of natural organisms. The proposed system integrates the use of 3D-printed bones and Liquid Crystal Elastomer (LCE) muscles to create modular, musculoskeletal robots capable of complex deformations and locomotion across varied terrains. This paper introduces two computational tools aimed at optimizing the skeletal design and control strategies for achieving multiple target deformations and desired locomotion patterns, demonstrating the potential of these modular robots to emulate the adaptability and functionality of vertebrates.
Introduction
Natural organisms exhibit remarkable adaptability and versatility through their musculoskeletal architectures, which allow them to traverse diverse environments and perform multifaceted tasks. This paper seeks to replicate these biological advantages in robotic systems by employing a combination of 3D-printed skeletal structures and LCE actuators which contract upon exposure to infrared radiation. The primary innovation lies in untethered control, enabling distributed actuation through localized infrared stimulation of LCE muscles without the constraints of external power sources or control harnesses.
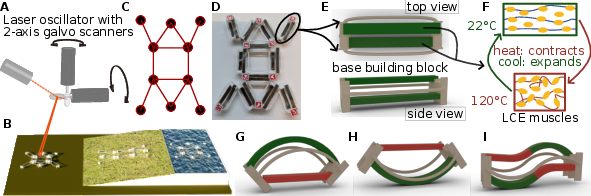
Figure 1: Our untethered laser heating setup allows for the modular fabrication and operation of musculoskeletal robots designed for specific tasks using optimized skeletal graphs and LCE muscles.
Methodology
The research introduces modular building blocks consisting of a rigid 3D-printed bone complemented by two LCE actuators. These building blocks form the backbone of a skeletal graph, which dictates the robot’s potential kinematics and morphologies. The computational tools developed within this framework serve two purposes: optimizing skeletal graphs for target deformation and co-optimizing these graphs with locomotion gaits for enhanced mobility.
The shaping of skeletal designs and locomotion gaits is facilitated by a numerical simulation tool that verifies design efficacy in terms of physical realization. Robots with varying tasks—from grid-bots demonstrating shape morphing capabilities to frog-bots optimized for multi-terrain navigation—illustrate the design space unlocked by this approach.
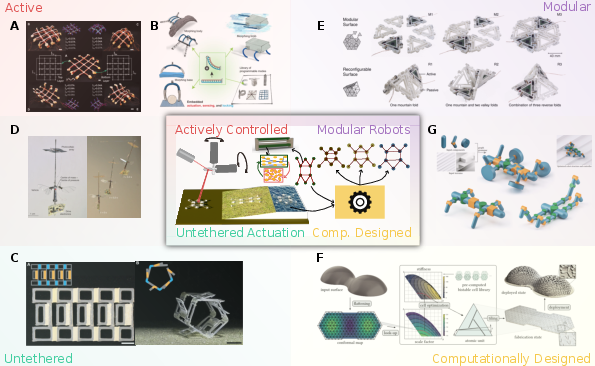
Figure 2: Active control of tethered and untethered robots highlights the integration of modular designs and computational optimization that inform wireless locomotion capabilities.
Results
Experiments validate the framework by showcasing robots with designed-for-purpose skeletal structures. The face-bot, grid-bot, morph-bot, Xbot, and frog-bot models prove the system's versatility and efficacy in simulating and then realizing target configurations. Notably, the morph-bot demonstrates computational design's strength in executing shape transformations verified through simulation before physical fabrication.
The laser heating setup, paired with real-time tracking and calibration, ensures precise actuation of the untethered muscles, achieving up to 33% contraction. Moreover, the system successfully scales the simultaneous activation of numerous actuators, vital for complex morphing and locomotion.
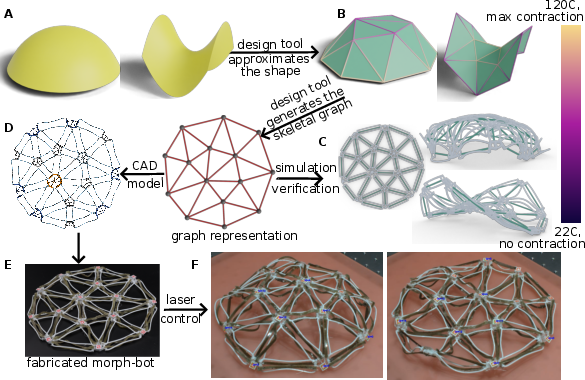
Figure 3: Using the computational design tool, we create morph-bots capable of transforming into target shapes such as domes and saddles, verified through simulation.
Discussion
This research marks a significant advancement in the computational design of modular, untethered robots with potential applications in environmental interaction, adaptive locomotion, and morphological transformations. It sets the groundwork for future robotic systems that benefit from evolved machine learning models and enhanced material science—moving towards replicating the design complexity found in nature.
The path forward includes expanding the material palette for 3D-printed components and exploring sustainable actuation mechanisms leveraging ambient infrared energy sources. Persistent issues such as the sim-to-real gap remain a challenge, yet they offer fertile ground for research into improved simulation methodologies and real-time learning algorithms.
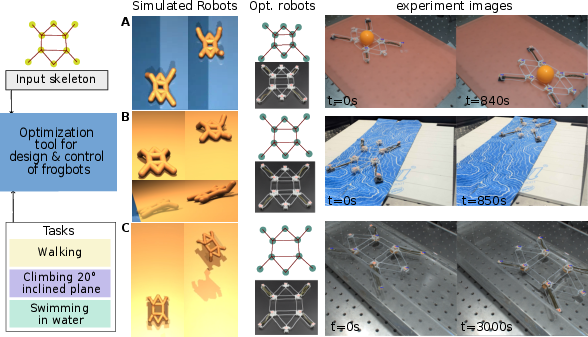
Figure 4: Multi-terrain frog-bots optimized for walking, climbing, and swimming demonstrate the adaptive capabilities unlocked by our system.
Conclusion
The integration of modular robotic design, untethered actuation, and computational optimization influences future directions in soft robotics. By drawing inspiration from natural organisms, this work enhances robotic adaptability, paving the way for systems that can perform context-specific tasks independently and efficiently. Further developments in computational tools, actuator design, and energy sourcing promise to advance this burgeoning field.