- The paper introduces a novel quadtree-based MPC framework that transforms collision avoidance into a convex constrained optimization problem.
- The methodology leverages hierarchical occupancy grids and B-spline smoothing to plan trajectories within safe, convex regions.
- Benchmark tests show 100% success in complex, non-convex environments, outperforming conventional MPC in both computational efficiency and safety.
A Comprehensive Overview of "Collision-Free Navigation of Mobile Robots via Quadtree-Based Model Predictive Control"
Introduction
The paper "Collision-Free Navigation of Mobile Robots via Quadtree-Based Model Predictive Control" introduces an innovative navigation framework for Autonomous Mobile Robots (AMRs) that unifies environment perception, trajectory planning, and Model Predictive Control (MPC) to achieve efficient and collision-free navigation. This approach leverages a quadtree-based method to generate structured, axis-aligned collision-free regions from occupancy maps and integrates these into the MPC process as linear constraints, thus enabling reliable navigation without the need for explicit obstacle encoding.
Methodology
Quadtree-Based Safe Area Generation
The proposed method begins with the generation of occupancy grids which are segmented using a quadtree approach to capture the spatial structure of the environment more efficiently. This hierarchical representation merges homogeneous areas into larger convex regions, reducing data redundancy and simplifying the complexity of the navigation task. The procedure ultimately produces a quadtree that represents the environment with fewer, larger safe regions which are used for trajectory planning and constraint generation.
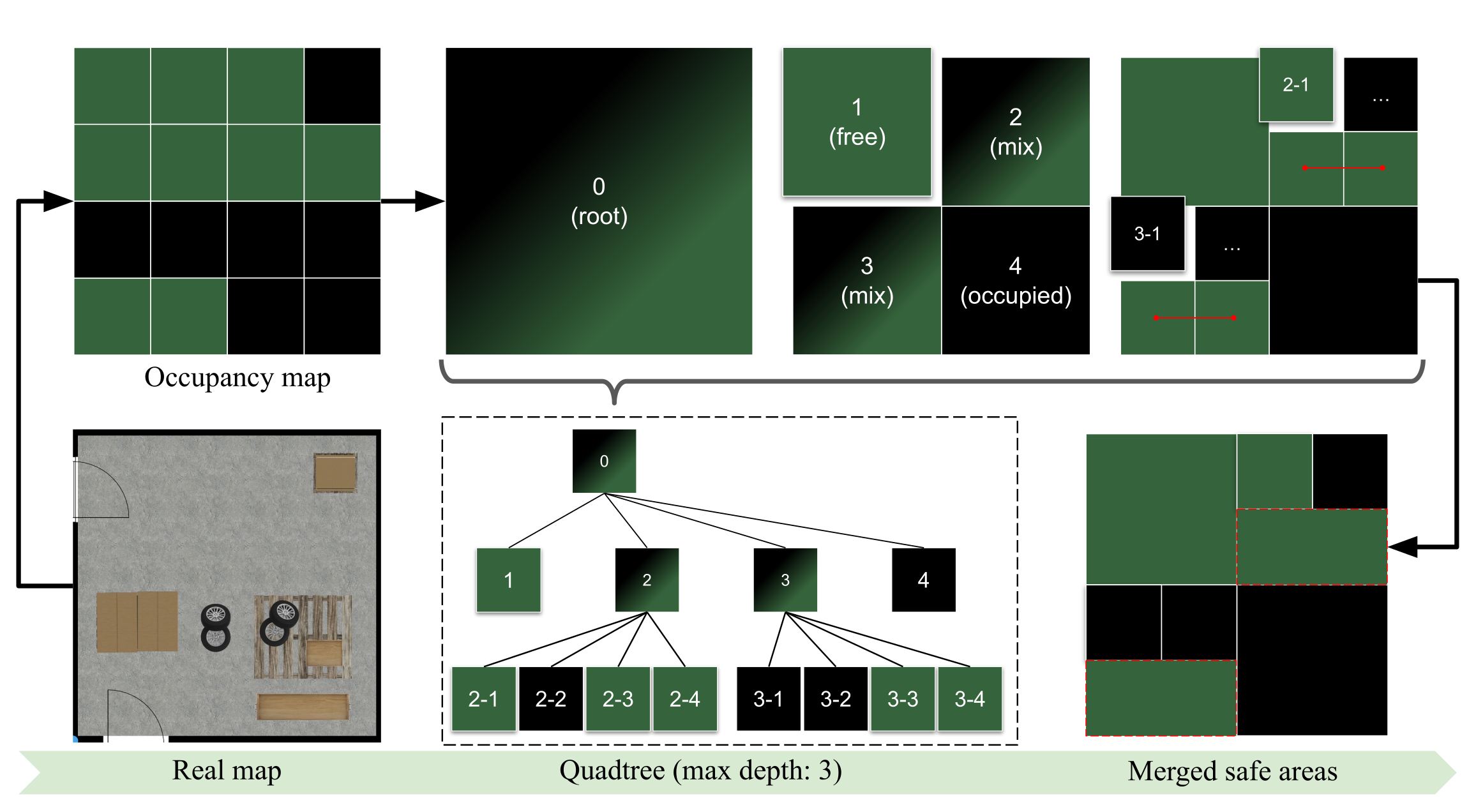
Figure 1: Illustration of the safe area generation: From the real-world map to occupancy map generation, quadtree decomposition (nodes are indexed with different colors representing their states), and merged safe areas enabling efficient trajectory planning.
Trajectory and Constraint Integration
The trajectory planning framework involves three main steps: waypoint generation, interpolation, and B-spline smoothing. Waypoints are selected to traverse safe polygons, and are then interpolated into a dense reference path before being smoothed using B-splines. This procedure ensures that the path remains collision-free by adhering to the quadtree-generated safe areas.
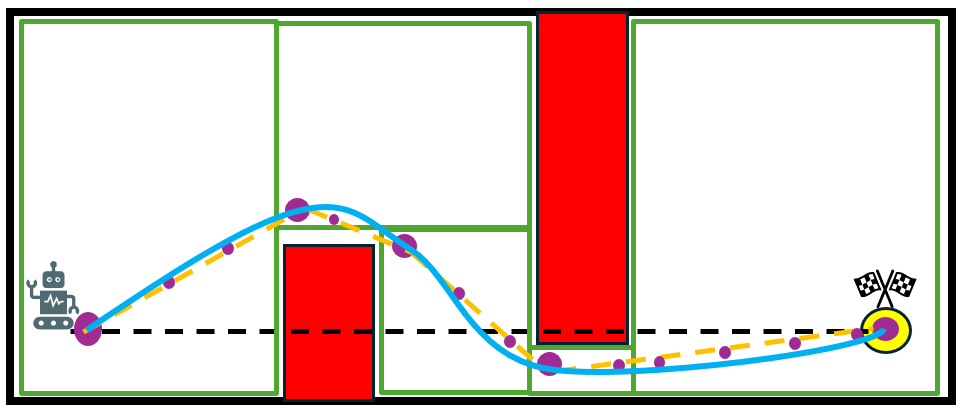
Figure 2: Trajectory generation. Green rectangles are safe regions, and red blocks are obstacles. The dark dashed line is the original reference path. Large purple points are waypoints from greedy search, and small ones are interpolated. The yellow polyline forms the new reference path, and the blue curve is the B-spline-smoothed trajectory.
The framework incorporates these safe areas directly into the MPC as linear inequality constraints, transforming the usually non-convex problem of collision avoidance into a tractable convex optimization problem. This method ensures that the robot operates within well-defined safety boundaries, thus improving computational stability and robustness.
Implementation and Results
The proposed SA-MPC framework is evaluated under diverse scenarios involving both convex and non-convex obstacles. The results confirm its superior performance compared to conventional MPC approaches, which struggle with the non-convexities intrinsic to real-world environments. Specifically, the SA-MPC shows 100% success rates in scenarios where traditional methods fail, particularly in complex environments characterized by non-convex obstacles.
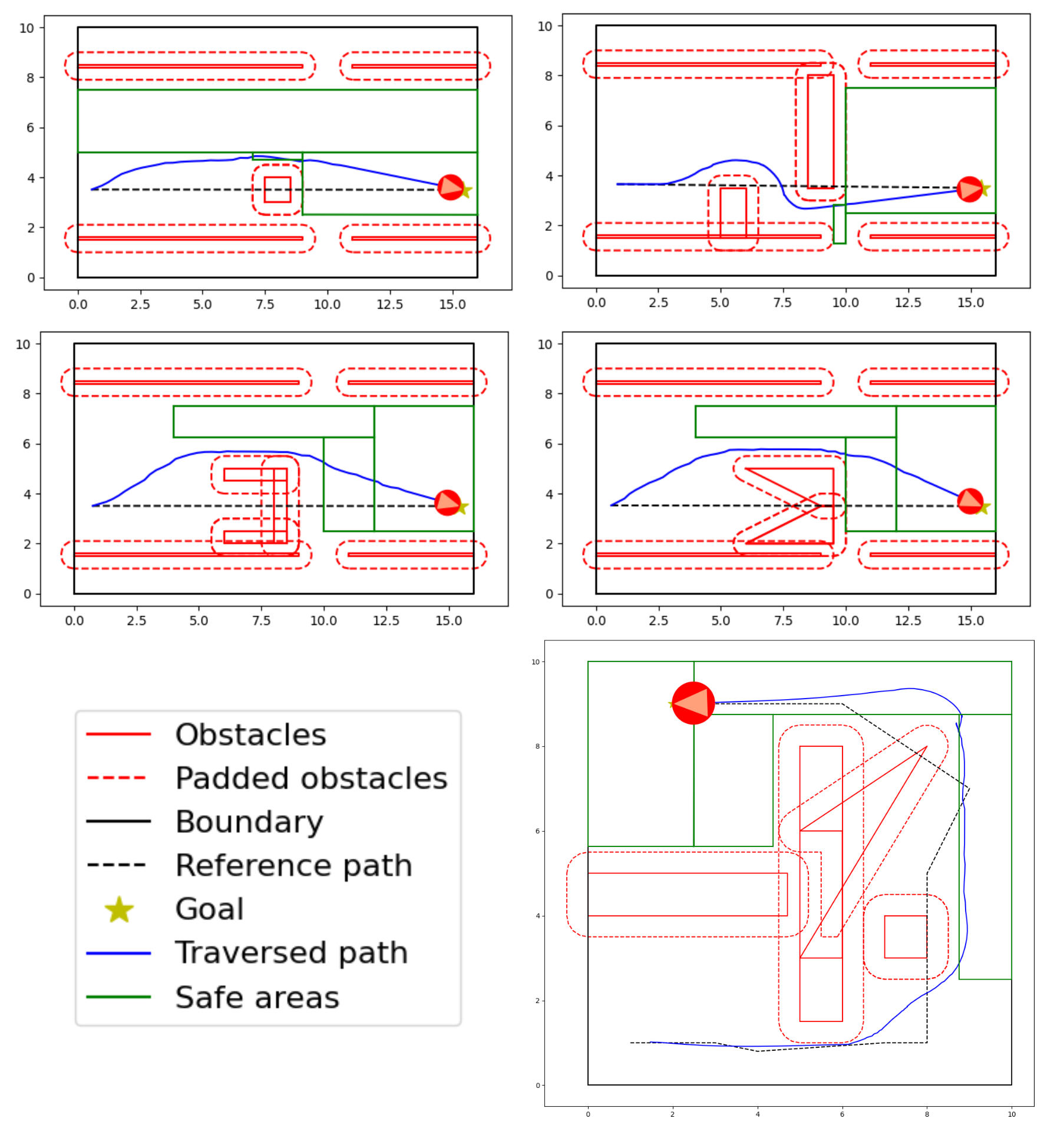
Figure 3: SA-MPC navigation across test scenarios with quadtree-derived safe areas (green).
The framework was further benchmarked against baseline methods and demonstrated consistent superiority both in terms of computational efficiency and collision avoidance. Success was determined not only by the correctness of the navigation but also by the efficiency of computation, highlighting the ability of the SA-MPC to maintain feasible control inputs without computational spikes.
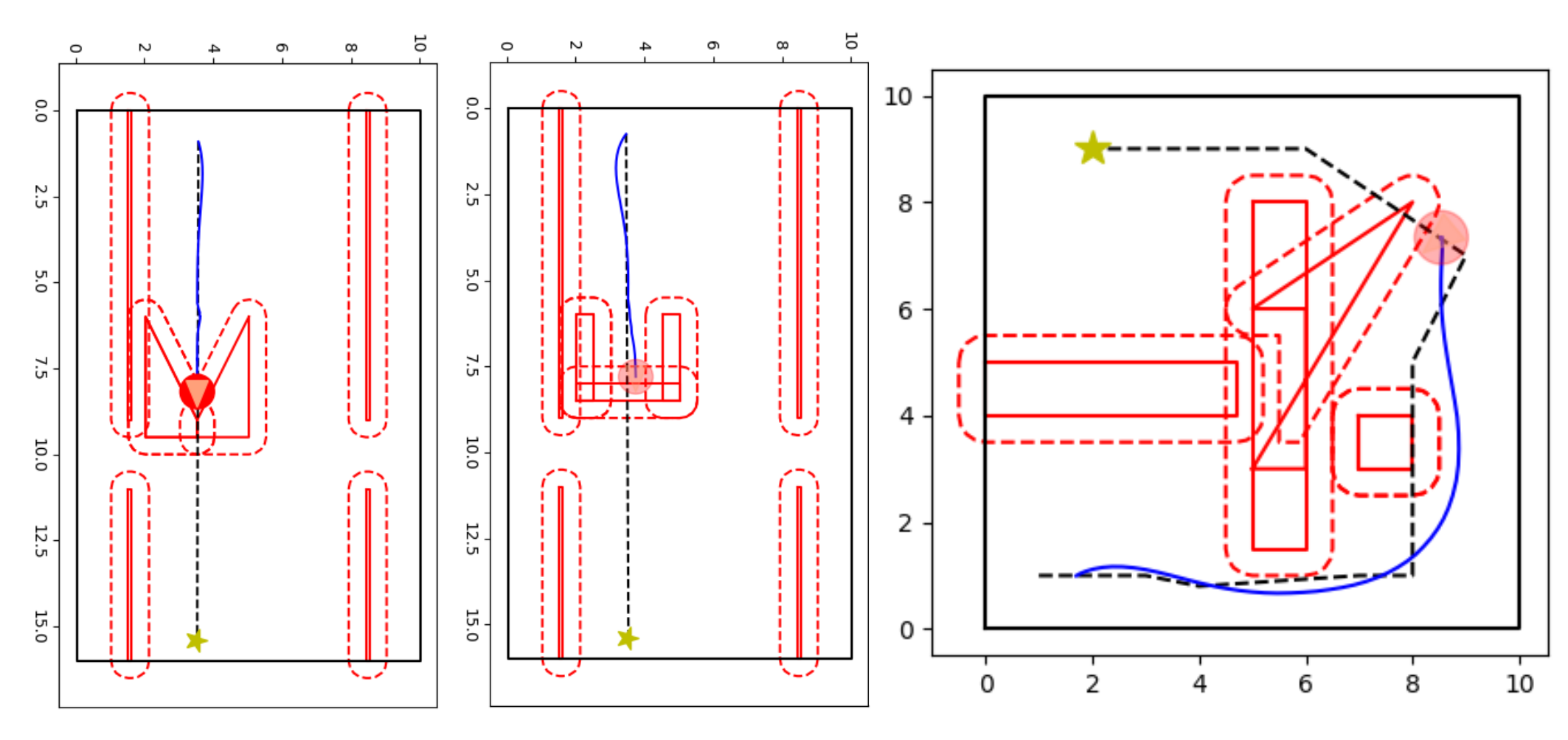
Figure 4: Baseline MPC performance showing failures in non-convex and complex scenarios.
Discussion and Conclusion
The introduction of a quadtree-based approach to the MPC framework provides a significant enhancement in managing navigation tasks involving non-convex obstacles. By simplifying the spatial constraints through the generation of larger, convex safe areas, the proposed framework demonstrates robust and efficient trajectory planning that outperforms existing methods.
A notable limitation, however, lies in the reliance on axis-aligned safe areas, which may introduce conservatisms in diagonally structured environments. Future advancements could explore dynamic updates to the quadtree to accommodate moving obstacles and extend the approach to multi-robot coordination scenarios.
Overall, this study contributes a reliable and computationally efficient solution for AMR navigation by integrating perception, environment understanding, and control in an innovative manner. Future research will aim to test the approach under dynamic conditions and further refine its application in real-world deployments.

