- The paper proposes a novel integration of Dynamic Control Barrier Functions with Model Predictive Control to enhance safety in obstacle avoidance for mobile robots.
- It leverages LiDAR data to generate real-time obstacle maps and employs minimum bounding ellipses and Kalman filtering for accurate trajectory prediction.
- Empirical results from real-world and simulation studies demonstrate improved reaction times and trajectory stability over traditional MPC approaches.
Dynamic Control Barrier Function-based Model Predictive Control to Safety-Critical Obstacle-Avoidance of Mobile Robot
The paper "Dynamic Control Barrier Function-based Model Predictive Control to Safety-Critical Obstacle-Avoidance of Mobile Robot" proposes a novel approach integrating Dynamic Control Barrier Function (D-CBF) with Model Predictive Control (MPC) to address the critical challenge of obstacle avoidance in dynamic environments. This method leverages LiDAR data to dynamically detect and predict the trajectories of moving obstacles, incorporating uncertainty to ensure safe navigation.
Introduction
Autonomous navigation in dynamic and unstructured environments presents multiple challenges, including stable obstacle detection, parametric representation, and real-time motion planning. The proposed approach addresses these challenges through an integrated system framework. The framework employs onboard LiDAR to create real-time obstacle maps, parameterize obstacles as Minimum Bounding Ellipses (MBEs), and predict trajectories using Kalman filters to account for uncertainty.
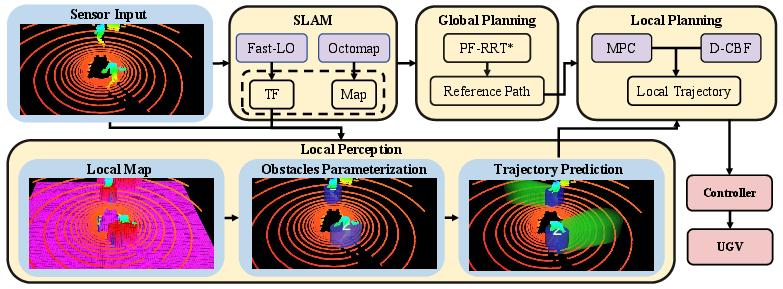
Figure 1: Overview of system framework integrating LiDAR perception, trajectory prediction, and MPC with D-CBF for dynamic obstacle avoidance.
System Framework
Local Perception
The local perception utilizes LiDAR-generated point clouds to build a 2.5D elevation map, crucial for obstacle detection. Obstacles are clustered using DBSCAN and enclosed within MBEs for simplified interaction. This approach enhances efficiency by transforming complex obstacle shapes into manageable geometric figures, facilitating both detection and trajectory prediction.
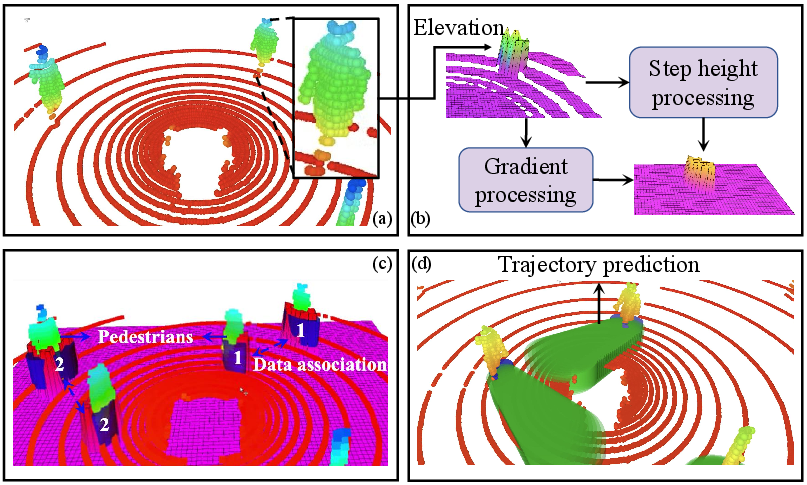
Figure 2: Visual representation of dynamic obstacle detection and tracking utilizing LiDAR-based local perception.
Dynamic Control Barrier Functions
D-CBFs extend traditional Control Barrier Functions to environments with dynamic obstacles, ensuring safety by maintaining the robot's position within a specified safety set. The introduction of D-CBFs accommodates movable obstacles, adapting the control constraints based on obstacle movement and shape parameters derived from real-time observations.
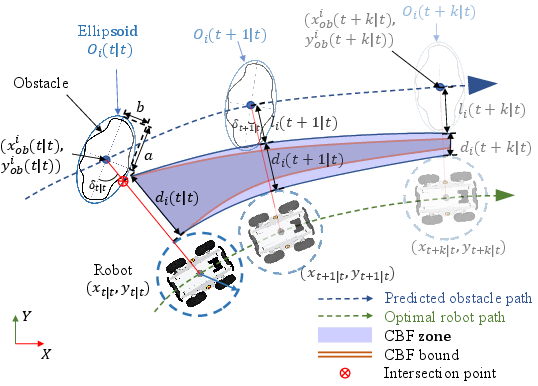
Figure 3: Optimal path generated using D-CBFs and MPC to ensure collision-free navigation.
Model Predictive Control
MPC optimizes the robot's trajectory over a receding horizon while adhering to dynamic constraints imposed by D-CBFs. This optimization incorporates the predicted paths of obstacles, calculated from the MBEs' parameters and their transformations across time steps, maintained through Kalman filtering. MPC refines this trajectory to ensure real-time responsiveness and safety.
Implementation and Results
Real-world Scenarios
Experiments demonstrate practical performance involving dynamic obstacles such as pedestrians and electromobiles, efficiently navigated using the proposed method on the Scout 2.0 platform equipped with onboard sensors. The framework's responsiveness to real-time obstacle prediction and avoidance in complex scenarios validates its reliability.
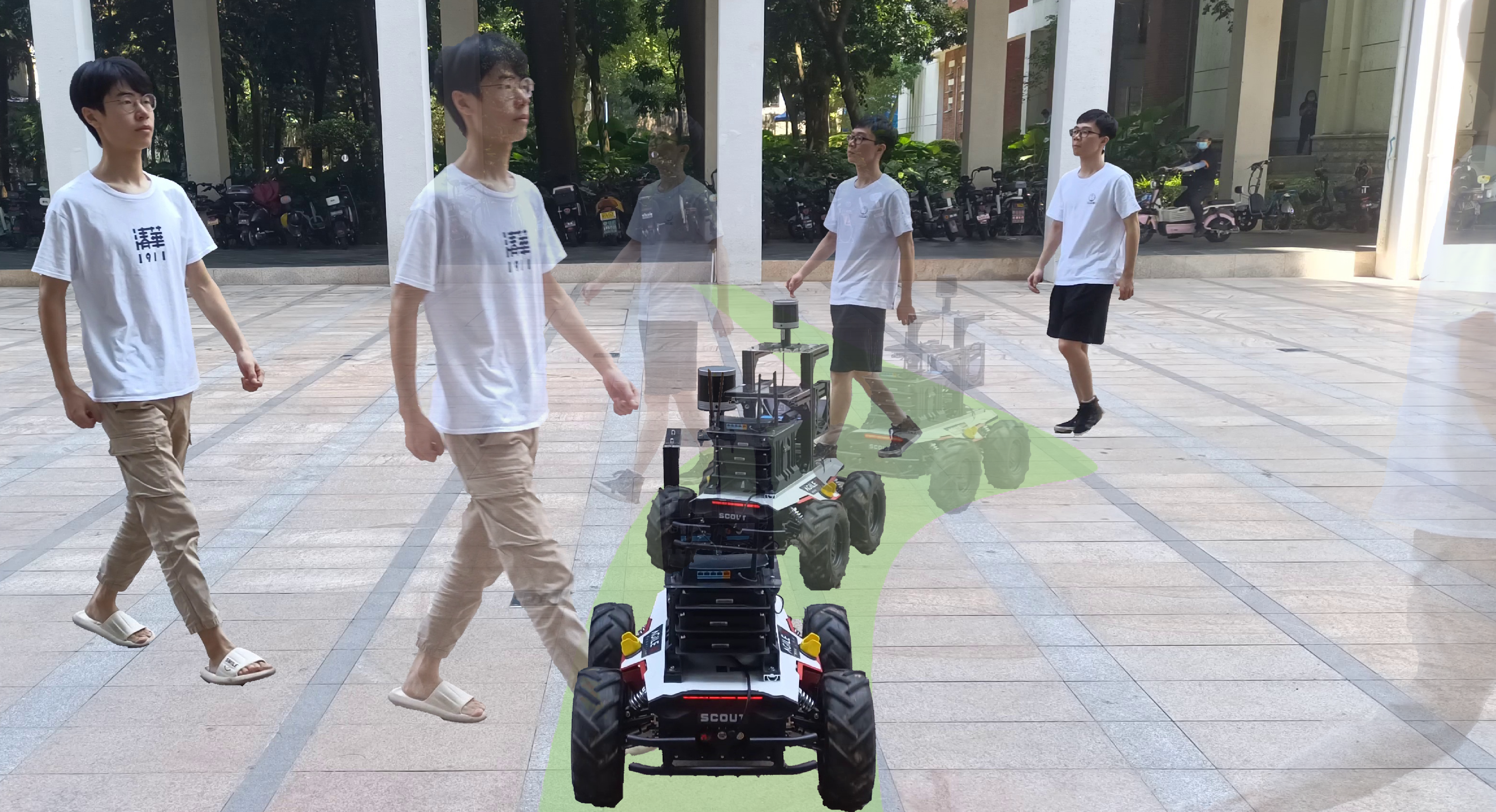
Figure 4: Real-world application of dynamic obstacle avoidance using Scout 2.0 navigating through scenarios with pedestrians.
Simulation Studies
Simulations further assess the algorithm's efficiency, comparing against baseline approaches like MPC-only and MPC-CBF variants. Results indicate superior reaction time and trajectory stability in environments with high-speed dynamic obstacles, showcasing robust performance under varied conditions.
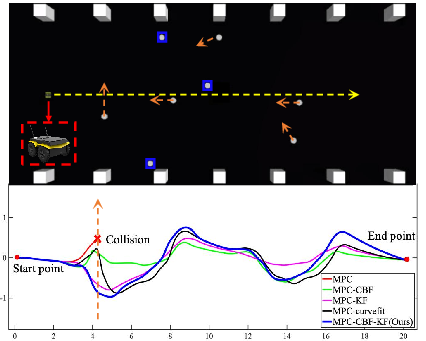
Figure 5: Simulation depicting obstacle avoidance with tracked trajectory comparisons across multiple methods.
Conclusion
The paper successfully integrates advanced D-CBF strategies with MPC to enhance collision avoidance capabilities in mobile robotics. By addressing real-time uncertainties through robust LiDAR-based perception and trajectory prediction, this research offers practical improvements in autonomous systems targeting dynamic environments. Future research may explore further optimization of computational resources and adaptability to diverse obstacle dynamics and shapes.

