3DGS-to-PC: Convert a 3D Gaussian Splatting Scene into a Dense Point Cloud or Mesh
Published 13 Jan 2025 in cs.GR and cs.CV | (2501.07478v1)
Abstract: 3D Gaussian Splatting (3DGS) excels at producing highly detailed 3D reconstructions, but these scenes often require specialised renderers for effective visualisation. In contrast, point clouds are a widely used 3D representation and are compatible with most popular 3D processing software, yet converting 3DGS scenes into point clouds is a complex challenge. In this work we introduce 3DGS-to-PC, a flexible and highly customisable framework that is capable of transforming 3DGS scenes into dense, high-accuracy point clouds. We sample points probabilistically from each Gaussian as a 3D density function. We additionally threshold new points using the Mahalanobis distance to the Gaussian centre, preventing extreme outliers. The result is a point cloud that closely represents the shape encoded into the 3D Gaussian scene. Individual Gaussians use spherical harmonics to adapt colours depending on view, and each point may contribute only subtle colour hints to the resulting rendered scene. To avoid spurious or incorrect colours that do not fit with the final point cloud, we recalculate Gaussian colours via a customised image rendering approach, assigning each Gaussian the colour of the pixel to which it contributes most across all views. 3DGS-to-PC also supports mesh generation through Poisson Surface Reconstruction, applied to points sampled from predicted surface Gaussians. This allows coloured meshes to be generated from 3DGS scenes without the need for re-training. This package is highly customisable and capability of simple integration into existing 3DGS pipelines. 3DGS-to-PC provides a powerful tool for converting 3DGS data into point cloud and surface-based formats.
The paper presents a novel framework that converts 3D Gaussian Splatting scenes into dense point clouds and meshes through probabilistic sampling and rendering-driven color assignment.
It employs camera pose-based rendering and Mahalanobis distance filtering to accurately capture scene geometry and ensure color fidelity.
The method enhances interoperability between neural scene representations and traditional 3D data pipelines, facilitating advanced graphics and machine learning applications.
3DGS-to-PC: Scene Conversion Framework for 3D Gaussian Splatting
Introduction
The proliferation of 3D Gaussian Splatting (3DGS) as a paradigm for radiance field representation has raised significant challenges for scene interoperability, particularly when converting specialized 3DGS formats into more ubiquitous representations such as point clouds and polygonal meshes. "3DGS-to-PC: Convert a 3D Gaussian Splatting Scene into a Dense Point Cloud or Mesh" (2501.07478) presents a systematic and extensible framework that directly addresses these challenges. By introducing a novel mechanism for point and mesh extraction from 3DGS data, the authors bridge essential gaps between recent neural scene representations and established 3D data processing pipelines. Critical algorithmic innovations include probabilistic sampling based on Gaussian volumetrics, robust outlier removal, accurate colour rendering for sample points, and an effective mesh generation pipeline through Poisson Surface Reconstruction.
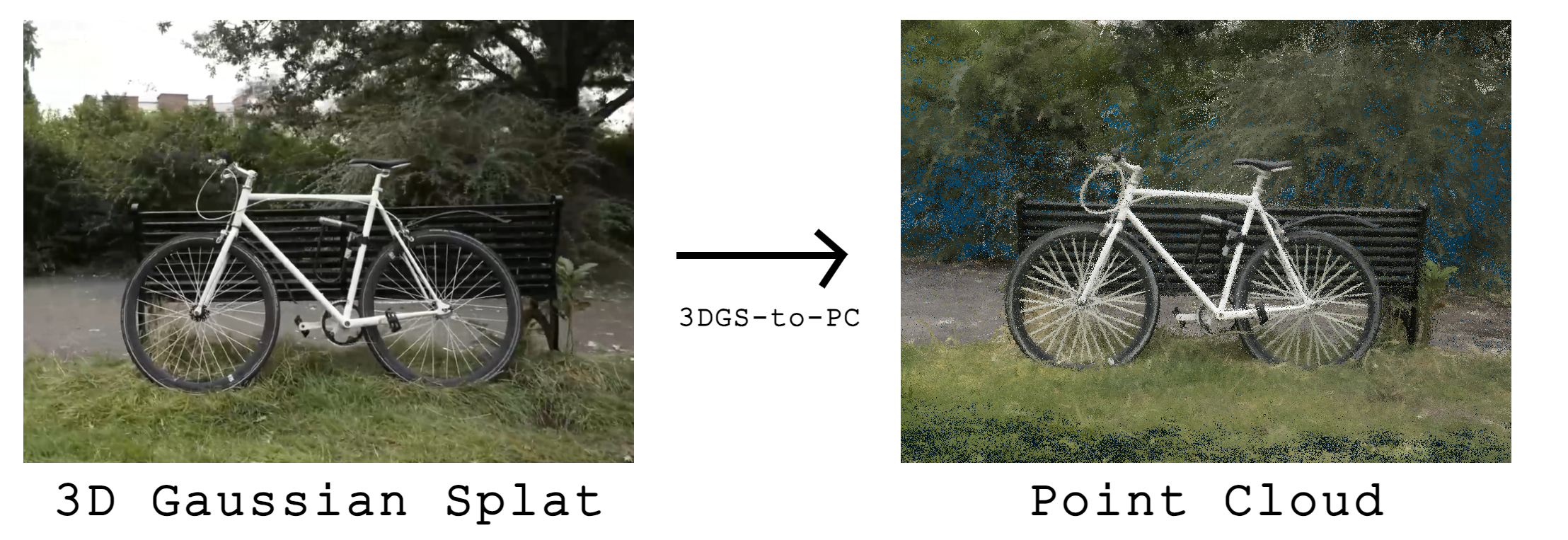
Figure 1: Demonstration of the 3DGS-to-PC framework converting the Mip-NeRF 360 "bike" scene from 3D Gaussian splats to a dense representative point cloud.
Framework Overview
The core contribution of 3DGS-to-PC is a highly configurable pipeline capable of taking 3DGS representations in standard formats (e.g., .splat, .ply) and, leveraging associated camera pose data, converting them into either dense coloured point clouds or watertight meshes. The framework is agnostic to the specific 3DGS generation method, requiring only that the basic Gaussian parameterization (position, scale, rotation, opacity, spherical harmonics) is present.
A key aspect of the framework's versatility is the filtering preprocessing, allowing for bounding box culling, size/opacity-based filtering, and custom scene subsetting, which can be used to target regions of interest and reduce artefactual sampling in outlier Gaussian components.
Accurate Colour Assignment via Render Contribution
A pivotal challenge in converting 3DGS scenes to point clouds is assigning accurate per-point colours. Simple approaches that assign each sampled point the base colour of its source Gaussian are inherently flawed, mainly because colour blending in 3DGS is highly view-dependent and contextually modulated through opacity and spatial occlusion.
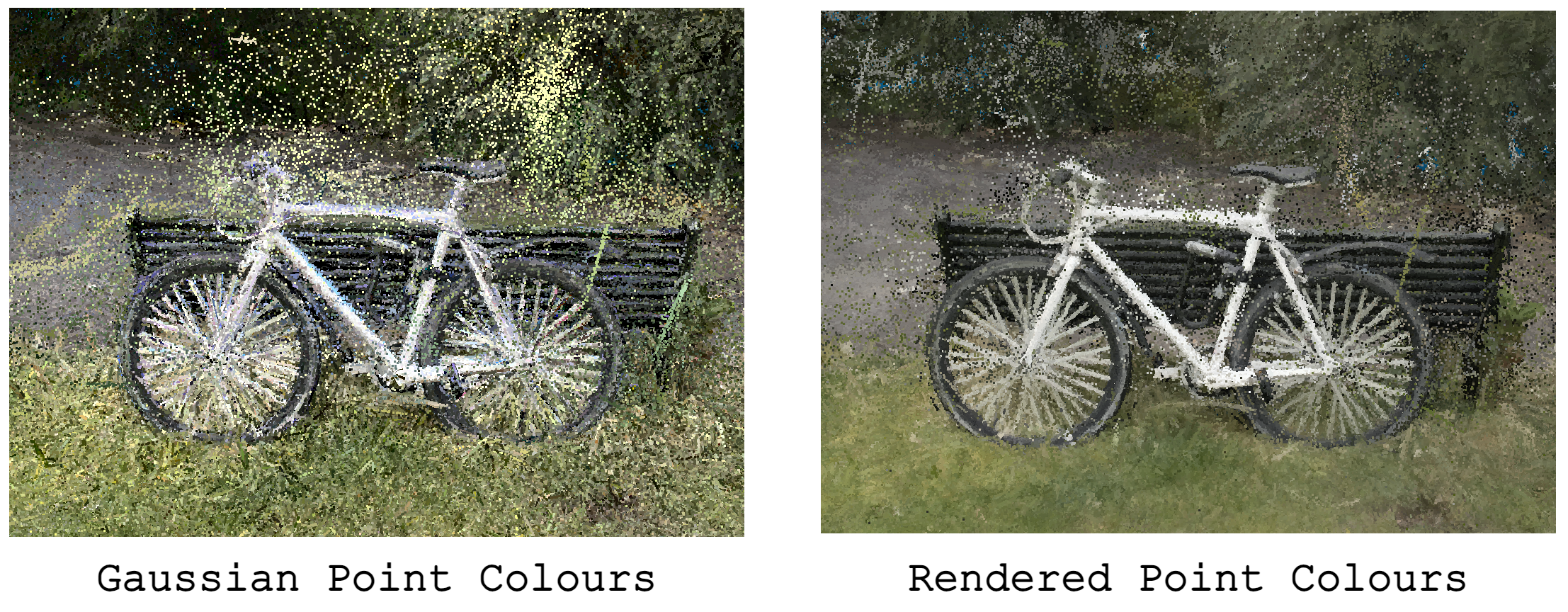
Figure 2: Impact of naïve per-Gaussian colour mapping (left) versus the proposed contribution-based rendering (right) on point cloud visual fidelity.
To solve this, the framework computes per-Gaussian colour assignments by rendering the scene from all available camera poses and associating to each Gaussian the pixel colour to which it contributed most, weighted by its transmittance and alpha during the rendering process:
Ci=aiti
where ai is the alpha (opacity) of Gaussian i and ti is its cumulative transmittance along the viewing ray.
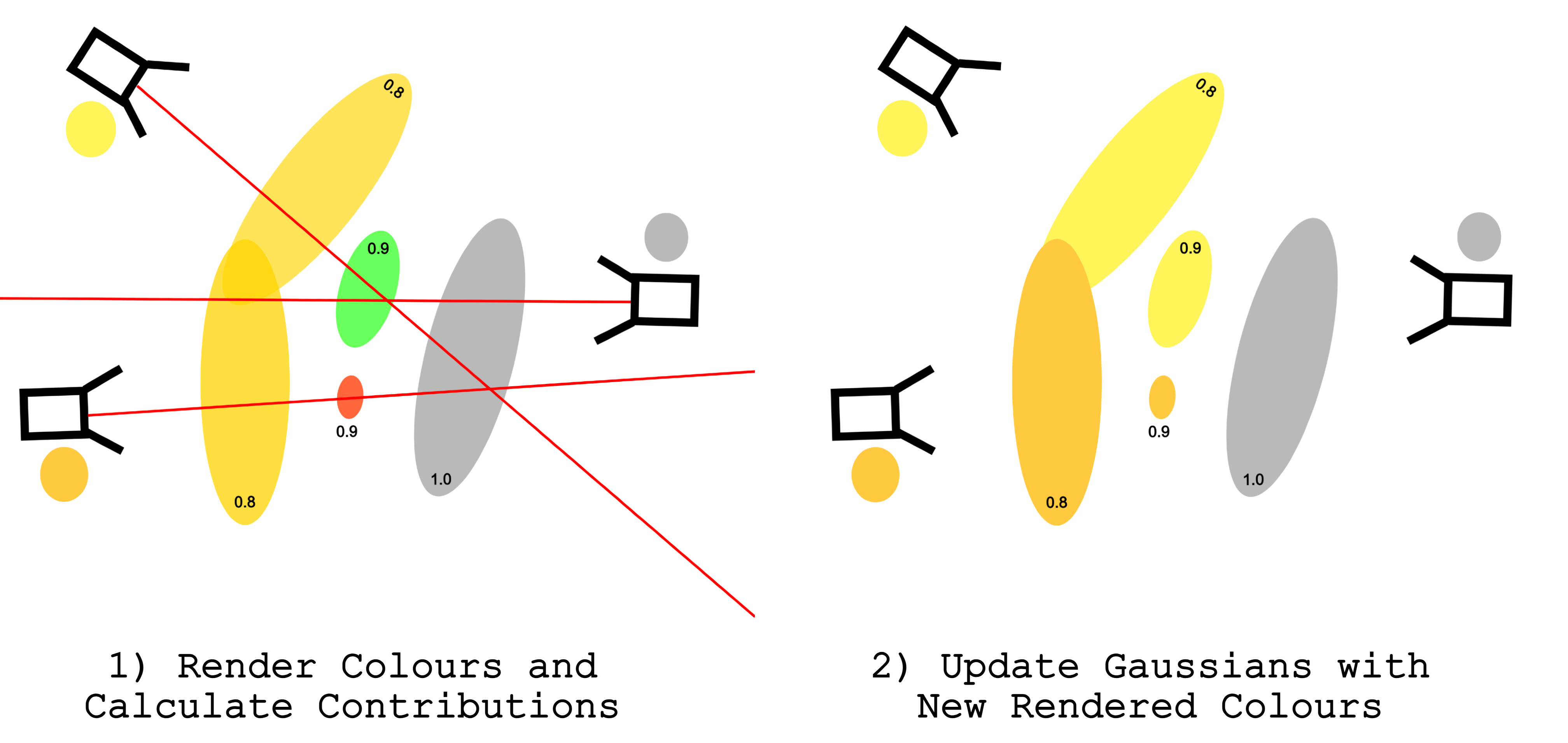
Figure 3: Illustration of the rendering-driven Gaussian colour update process capturing occlusion and true surface appearance, critical for high fidelity point sampling.
This method robustly disambiguates between surface and occluded Gaussians by ensuring that visually significant (render-contributing) components receive representative colour assignments, while non-contributing or background Gaussians can be filtered out entirely.
Probabilistic Point Sampling with Outlier Removal
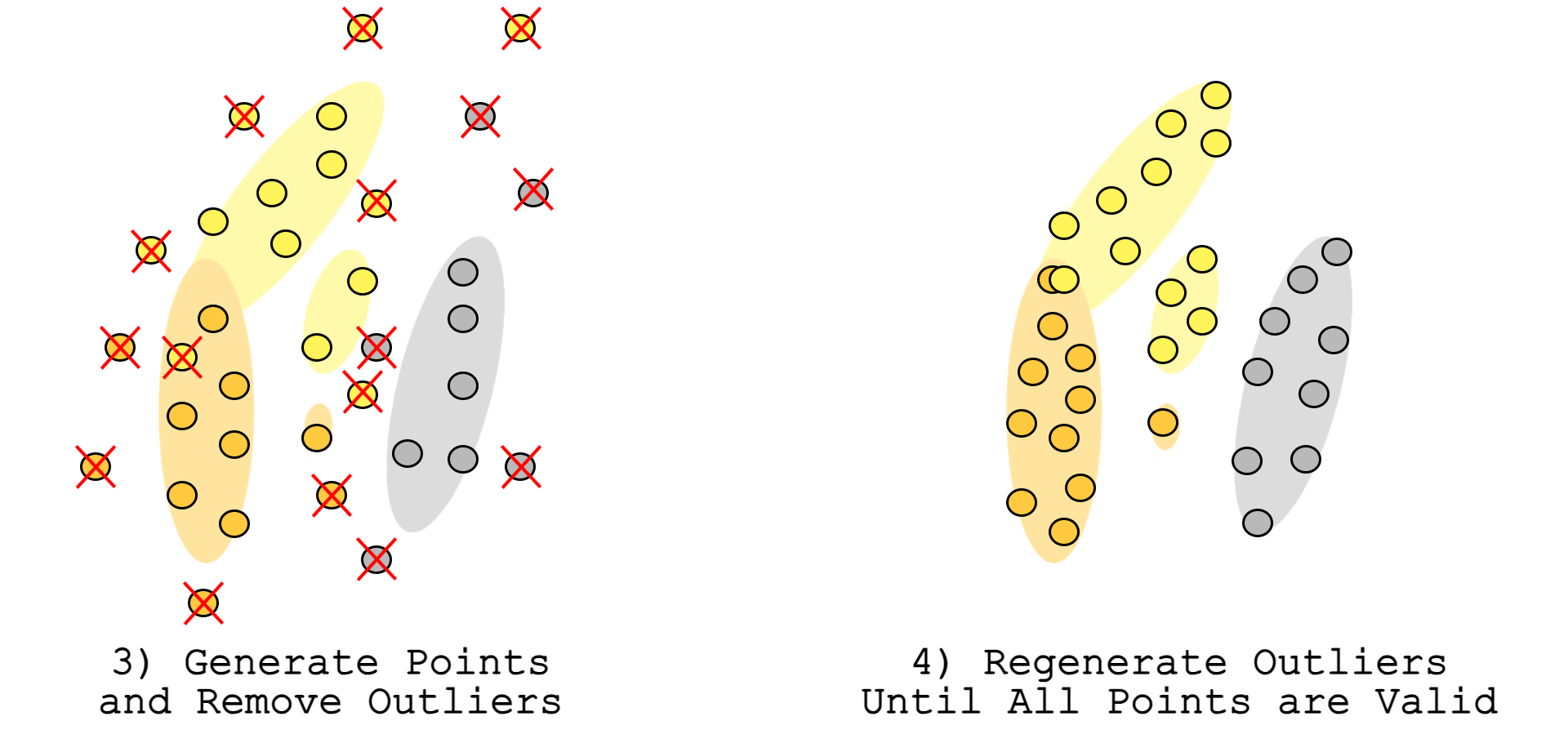
Each Gaussian is treated as a 3D multivariate normal distribution. The framework determines the number of points to sample from each Gaussian by estimating its "volume" using a tailored formulation based on the exponentiated scale parameters, ensuring elongated or voluminous Gaussians yield more samples. To prevent statistically improbable outlier samples, the Mahalanobis distance of each point from its Gaussian’s mean is computed, and points exceeding two standard deviations are discarded and regenerated:
DM(x)=(x−μ)⊤Σ−1(x−μ)
This approach guarantees that the resulting point cloud accurately reflects the intended geometry encoded by the 3D Gaussians.
Figure 4: Volumetric and statistical filtering process in point generation, ensuring high spatial fidelity by discarding outliers.
By leveraging parallelized binning and re-sampling strategies, the system efficiently generates arbitrarily dense point clouds, scaling gracefully with the number of Gaussians and total points desired.
Surface Mesh Generation
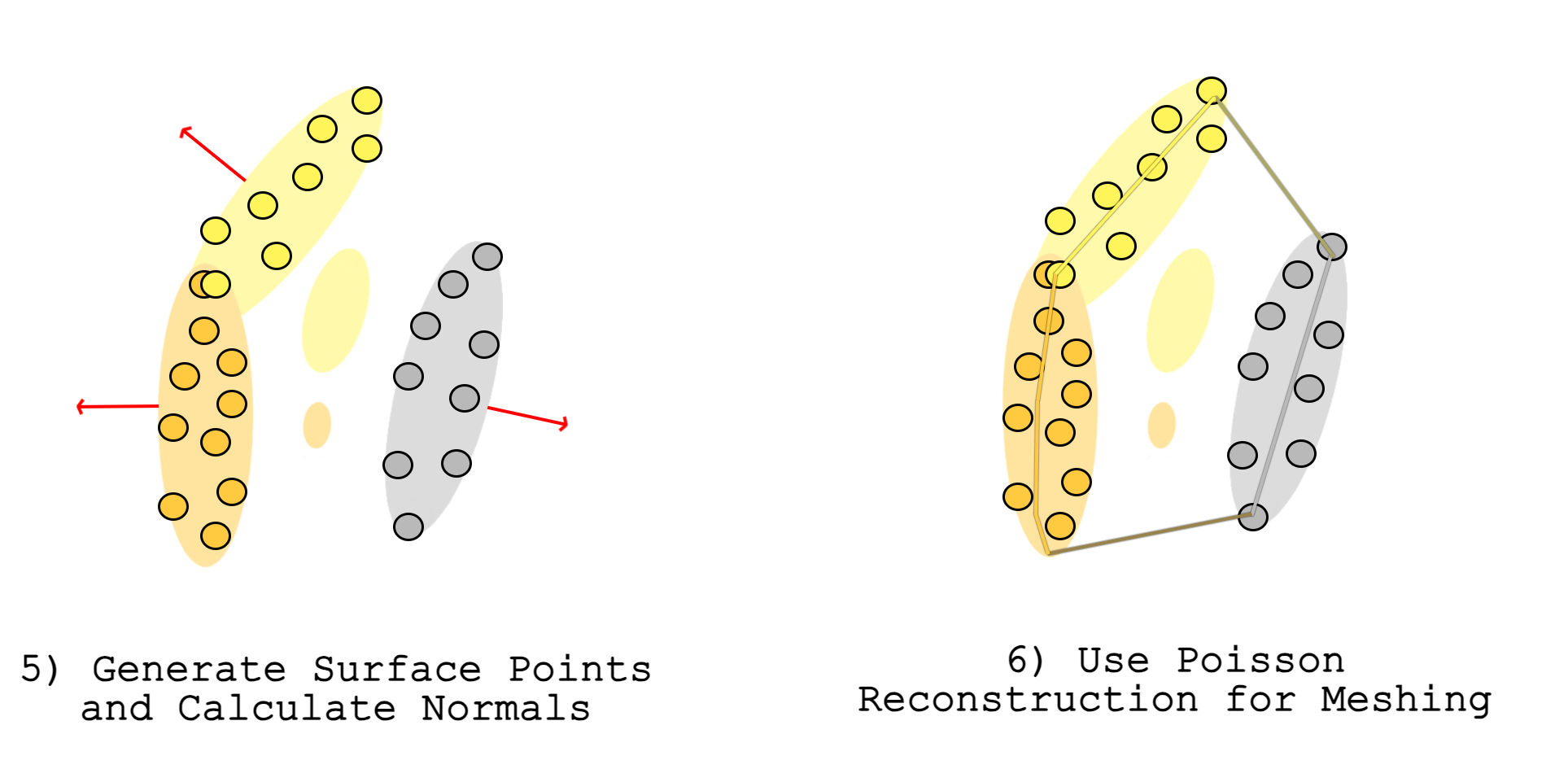
Beyond direct point sampling, the framework supports mesh extraction by integrating statistical surface detection and Poisson Surface Reconstruction. Following the colour and contribution analysis, only Gaussians with contributions above the mean (i.e., likely to be on the visual hull) are selected for surface sampling. For these, point normals are estimated to coincide with the minor axis of the associated Gaussian, then filtered for noise before mesh reconstruction.
Figure 5: Pipeline for mesh generation from surface-aligned Gaussians through high-confidence region sampling and Poisson Surface Reconstruction.
This methodology avoids the pitfalls of including volumetric (i.e., non-surface) Gaussians, culminating in consistent and visually plausible mesh outputs. Optionally, Laplacian smoothing post-processing is available to further enhance mesh quality.
Comparative Analysis and Visual Results
Empirical evaluation demonstrates that point clouds and meshes derived using this framework more closely approximate the geometry and appearance of the original 3DGS scenes compared to naïve centre-only methods or post-hoc mesh sampling. By explicitly sampling the entire spatial support of each Gaussian and utilizing pixel-wise colour estimation, the resulting representations maintain high scene fidelity and colour consistency.
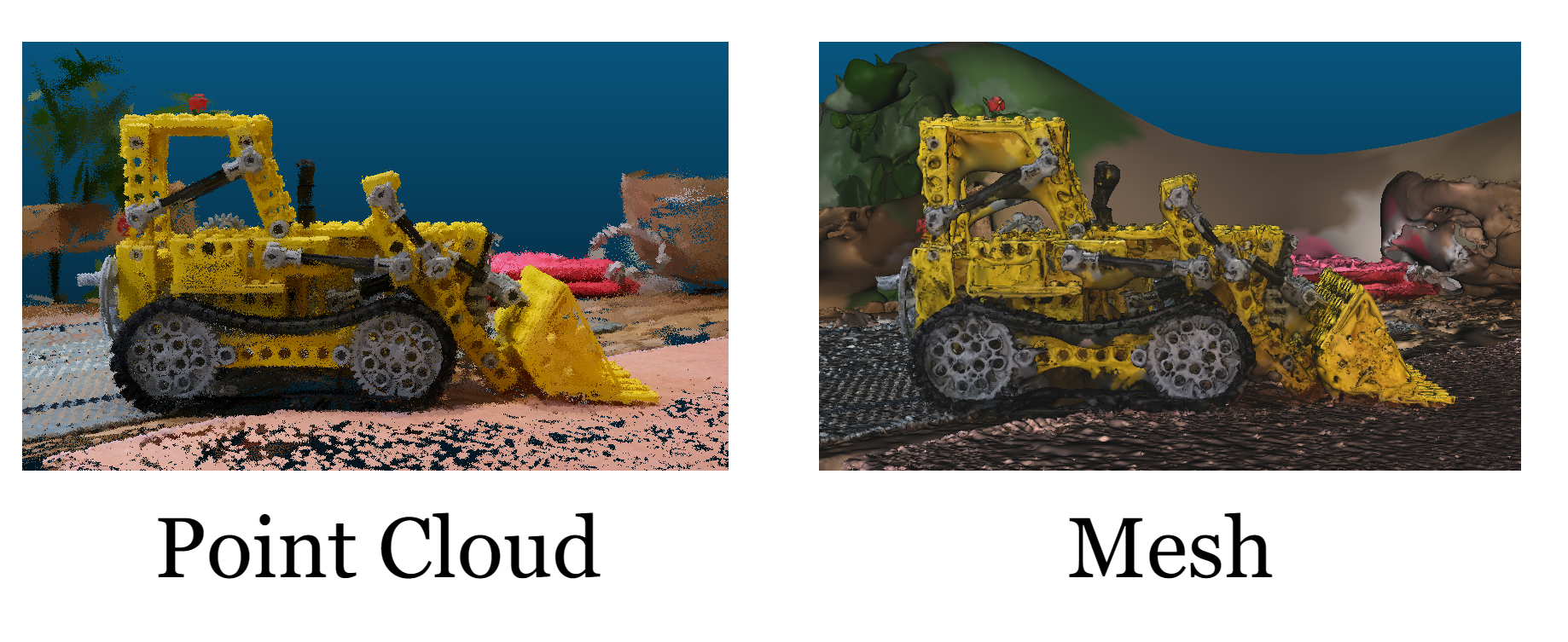
Figure 6: Close-up comparison of point cloud versus mesh reconstruction for the Mip-NeRF 360 "kitchen" scene, illustrating the framework’s preservation of fine details.
Comparison with mesh-centric 3DGS extensions (e.g., SuGAR, GaMeS) reveals that while those produce highly accurate surface meshes, their derived point clouds are inherently sparser, as they sample only on explicit surfaces. In contrast, 3DGS-to-PC can reconstruct dense or even volumetric point clouds, improving utility in scenarios requiring full-scene coverage (e.g., scientific measurement, DL training).
Limitations and Implications
The main computational bottleneck is in rendering-based colour assignment, which relies on a pure Python (PyTorch) renderer rather than the fastest CUDA-based backends, leading to slower per-frame render times for large-scale scenes and extensive camera pose sets. Moreover, accurate colour assignment is contingent on the availability of original camera poses—without them, only base per-Gaussian colours are used, degrading photorealism in the output. The mesh extraction process may be susceptible to surface noise on large or poorly aligned Gaussians, though the provided filters and smoothing methods mitigate most such artefacts.
Pragmatically, this framework enables 3DGS scene deployment in standard graphics, scientific, and ML applications that expect point clouds or meshes as input, greatly extending 3DGS applicability. Theoretically, it provides new avenues for analyzing the internal geometry of neural radiance field representations by exposing their probabilistic structure as explicit discrete samples.
Conclusion
3DGS-to-PC (2501.07478) delivers a robust methodology for converting arbitrarily parameterized 3D Gaussian Splatting scenes into dense point clouds and meshes. Its rendering-driven colour assignment, Gaussian volume-proportional sampling, and robust meshing pipeline set a technical standard for 3DGS interoperability. While limitations remain with respect to rendering speeds and pose dependency, future research may streamline these processes through more efficient renderers, differentiable sampling, or synthetic pose generation.
This system serves as a critical enabling technology for cross-domain adoption of advanced 3D representations and can underpin further research in scene analysis, simulation, and 3D geometric deep learning.