The Next Best View Problem
The Next Best View Problem is a fundamental challenge in autonomous 3D reconstruction and robotic exploration. It addresses the sequential selection of sensor poses—where a robot or camera should look next—to maximize information gain while minimizing resource costs. This presentation explores how algorithms balance coverage, occlusion reasoning, and computational efficiency across volumetric, surface-based, and learned representations, and examines both classical geometric methods and modern deep learning approaches that enable robots to intelligently explore and reconstruct unknown environments.Script
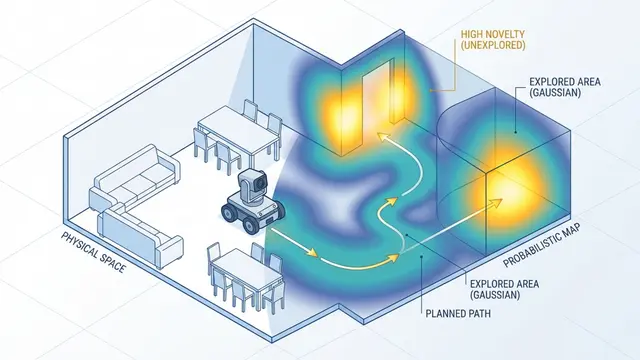
When a robot explores an unknown object or environment, it faces a deceptively simple question: where should it look next? This is the Next Best View Problem, a challenge at the heart of autonomous 3D reconstruction.
The problem is formally defined as choosing the next sensor position and orientation that maximizes a utility function, quantifying how much new information each candidate view reveals. The best algorithms balance exhaustive coverage against travel cost, handling occlusions and robot kinematics along the way.
How you represent a scene determines how you compute utility.
Voxel and mesh methods offer explicit occlusion handling and precise information gain, at the cost of heavy computation. Point-cloud and learned representations flip that trade-off: they sacrifice some precision for dramatic speedups, enabling real-time planning in large or dynamic scenes.
The algorithmic loop is elegant. First, update your model of the scene. Next, propose candidate sensor poses. Then score each candidate by how much unknown space it reveals or how much uncertainty it reduces. Finally, move to the winner and repeat until the object or space is fully reconstructed.
Classical geometry meets modern machine learning in Next Best View planning.
Geometric planners leverage explicit visibility and occlusion reasoning, with recent innovations like ellipsoid projection delivering order-of-magnitude speedups. Deep learning flips the paradigm: networks trained on reconstruction tasks learn to predict high-utility views directly, often matching classical methods while running in milliseconds per decision.
Empirical progress has been striking. Point-density planners reconstruct objects in half as many views as traditional voxel methods. Uncertainty-aware networks distinguish high-confidence from ambiguous candidates, tripling effective accuracy. And when multiple robots coordinate their views, they unlock substantial gains over isolated exploration.
The Next Best View Problem is no longer a laboratory curiosity. Today, NBV algorithms drive autonomous drones inspecting bridges, robots reconstructing archeological sites, and search-and-rescue systems navigating occluded forests. Risk-aware and resource-constrained variants make these systems practical, balancing exploration with safety and battery life.
The question of where to look next turns out to be a window into perception, planning, and intelligence itself. To explore more topics like this and create your own videos, visit EmergentMind.com.