Generative Modeling via Drifting
This presentation explores a groundbreaking non-iterative approach to generative modeling that reframes the entire paradigm. Unlike diffusion and flow-based models that require multiple inference steps, Drifting Models absorb all distributional evolution during training, enabling high-quality one-step generation. By leveraging anti-symmetric drifting fields in learned feature spaces, this method achieves state-of-the-art results on ImageNet with drastically simplified inference, while also generalizing to robotic control tasks.Script
What if we could train a generative model that produces perfect samples in a single step, no diffusion iterations required? This paper introduces a radical departure from standard generative modeling, replacing inference-time iteration with a training-centric evolution driven by drifting fields.
Let's first understand the challenge this work addresses.
Traditional generative models face a fundamental trade-off. Diffusion and flow-based approaches achieve impressive quality but demand extensive computation at inference time, evaluating neural networks repeatedly for every single sample generated.
The authors propose an elegant solution that collapses iteration into training.
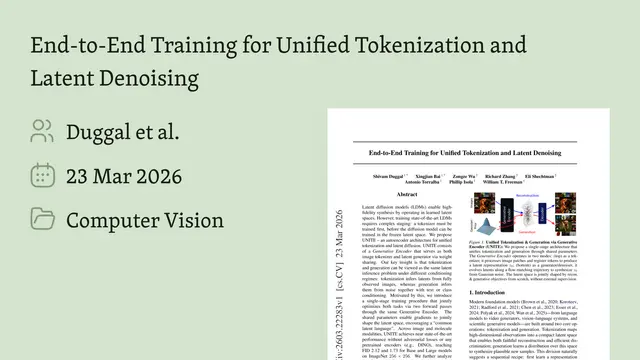
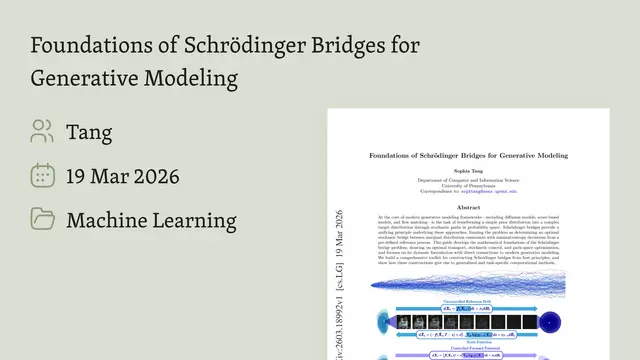
Here's the key insight. Instead of iterating at generation time, the method trains a network whose output distribution evolves under a carefully designed drifting field, with training driving this evolution until the generated samples perfectly match real data.
The drifting field has elegant mathematical properties. Its anti-symmetry guarantees it vanishes exactly when distributions match, and the training objective simply minimizes the field's magnitude using kernelized similarity in semantically meaningful feature spaces.
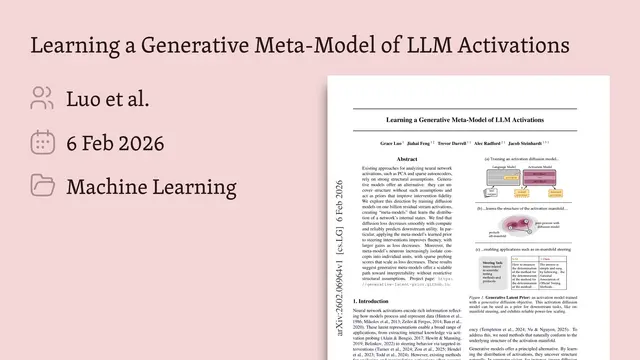
A crucial implementation detail is that the entire approach depends on high-quality feature spaces. The authors train in representations from self-supervised encoders, and ablations confirm that better feature extractors directly translate to superior generative performance.
Now let's examine how this performs in practice.
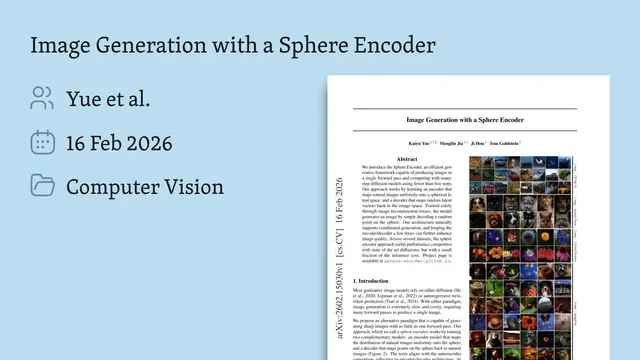
The empirical results are striking. On ImageNet, Drifting Models achieve FID scores of 1.54, surpassing previous one-step baselines like MeanFlow and matching iterative diffusion models, while the approach also generalizes successfully to robotic control tasks.
The method does have important limitations. Success hinges critically on feature encoder quality, kernel hyperparameters need careful calibration, and while empirically robust, complete theoretical guarantees that zero field implies perfect distribution matching remain an open question.
Drifting Models fundamentally reimagine generative learning as training-time evolution rather than inference-time iteration, achieving exceptional one-step generation that challenges the necessity of diffusion's computational overhead. Visit EmergentMind.com to explore the full technical details and implications.