ForceBand: Learning Forceful Manipulation with sEMG
Abstract: Human demonstrations are a scalable data source for learning robot manipulation policies. However, common sources of human demonstration data, such as motion-capture trajectories and internet videos, capture mostly motion and appearance while missing the contact forces that are critical for force-sensitive manipulation. In this paper, we introduce ForceBand, a low-cost wrist-worn sEMG system that turns human muscle activity into force-enriched demonstrations. We first collect a 10-hour multimodal dataset containing egocentric video, sEMG, IMU, and fingertip force measurements across diverse actions and objects. Using this dataset, we pre-train an EMG2Force model that predicts per-finger forces from sEMG and IMU signals. After a short user-specific calibration, users can collect target-task demonstrations using only ForceBand and video; EMG2Force then labels these demonstrations with per-finger force traces, producing force-augmented demonstrations for robot policy learning. Experiments show that ForceBand recovers fine-grained fingertip interactions with over 50% lower force prediction error than vision-based baselines and achieves an 87% success rate on pick, squeeze, and place tasks that require object-specific force control across objects with diverse shapes, sizes, and weights. Project website: https://forceband-emg.github.io

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview: What this paper is about
This paper introduces ForceBand, a low-cost wristband that listens to the tiny electrical signals your muscles make (called sEMG) while you use your hands. The goal is to turn everyday human demonstrations into lessons that teach robots not just how to move, but how hard to squeeze or push—something regular videos can’t show. The team also builds a model, EMG2Force, that turns those muscle signals into “per-finger force” estimates, and then uses those estimates to train robots to handle objects with the right amount of force.
Key questions the paper asks
- How can we capture the “invisible” forces people use when handling objects, without bulky gloves or special sensors on the fingertips during every demonstration?
- Can a wrist-worn sEMG band plus a smart model accurately predict how much force each finger applies?
- Does adding this force information to human demonstration videos help robots learn to manipulate objects better—especially when force control really matters?
- Does placing the wristband’s electrodes over specific forearm muscles (instead of evenly around the wrist) improve accuracy?
How they did it (in simple terms)
Think of teaching a robot like teaching a friend by showing them what you do. Videos show what your hands look like and how they move, but they don’t tell how hard you’re gripping. This project fills that gap.
Here are the main pieces of the approach:
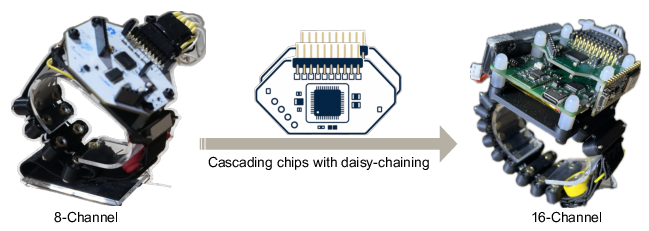
- Muscle-sensing wristband (sEMG + IMU):
- sEMG is like a microphone for muscles—it picks up tiny electrical signals when muscles activate.
- The band uses carefully placed pairs of electrodes (bipolar sensing) over specific forearm muscles that control the thumb and fingers. This reduces noise and focuses on the most informative muscles.
- An IMU (motion sensor) adds data about wrist motion and orientation, helping the system interpret the muscle signals during movement.
- A “teaching” dataset:
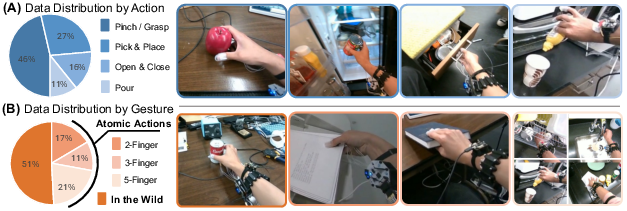
- The team collected about 10 hours of data: egocentric video (from the person’s point of view), sEMG, IMU, and special thin fingertip force sensors.
- During dataset collection only, those fingertip sensors give ground-truth force so the model learns what muscle signals “mean” in terms of force.
- Trick: The fingertip sensors were mounted inside transparent gel cots so the camera can still see the hand clearly—important for later video processing.
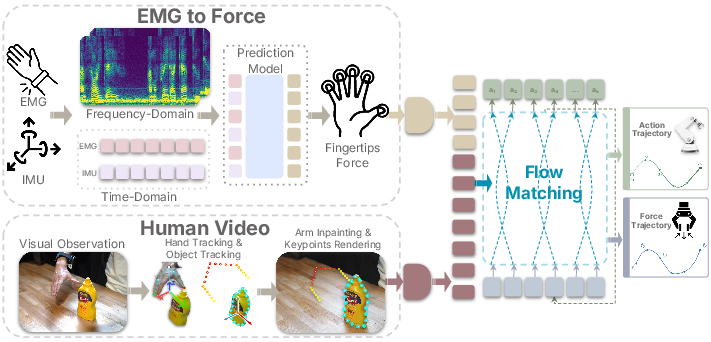
- EMG2Force model:
- Inputs: the sEMG and IMU signals over short time windows.
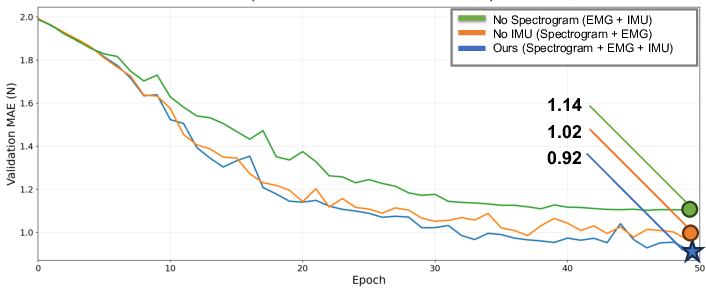
- The model looks at the signals in two ways:
- Time view: like watching the raw wiggles over time (using 1-D convolutions).
- Frequency view: like a music equalizer that shows which frequencies are strong (a “spectrogram,” processed with a pretrained visual encoder).
- A transformer then fuses these features and predicts how much force each of the five fingers applied over time.
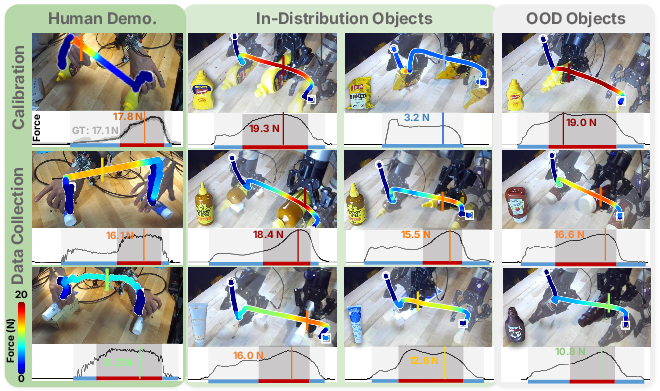
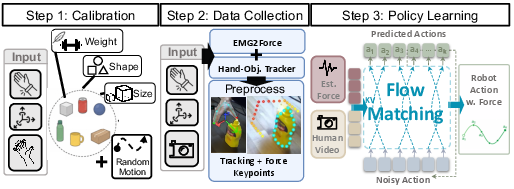
- Short personal calibration: each new user does a quick session (about 15 minutes) with fingertip sensors so the model adjusts to their muscle patterns and electrode placement. After that, you only need the wristband and a camera for new demonstrations.
- Turning human demos into robot training:
- The system takes human videos and “retargets” the hand motions to a robot’s gripper movements. Think of it as mapping human fingers to the robot’s simpler end-effector (position, orientation, and gripper opening).
- It also adds the predicted force traces from EMG2Force—so the demonstration now includes where to move and how hard to squeeze.
- A learning method called “flow matching” trains a robot policy to predict both future motions and force. A simple analogy: it learns a smooth path that transforms “random guesses” into the correct actions, using examples from the demonstrations.
Main findings and why they matter
- Better sensor placement matters:
- Placing electrodes over specific muscles (muscle-aware placement) worked better than evenly spaced electrodes around the wrist.
- It reduced force prediction error by about 18% compared to a uniform 8-channel layout.
- Predicting finger forces from the wrist works well:
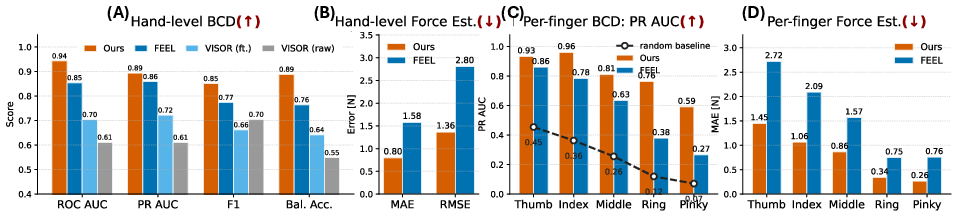
- EMG2Force cut force-prediction errors by more than 50% compared to vision-only methods.
- It especially helped when fingers were hidden from the camera—muscles still tell the story even if the camera can’t see the fingertips.
- Robots learned to control force, not just motion:
- On “pick, squeeze, and place” tasks with objects of different shapes, sizes, and weights, the force-aware policy achieved about 87% success.
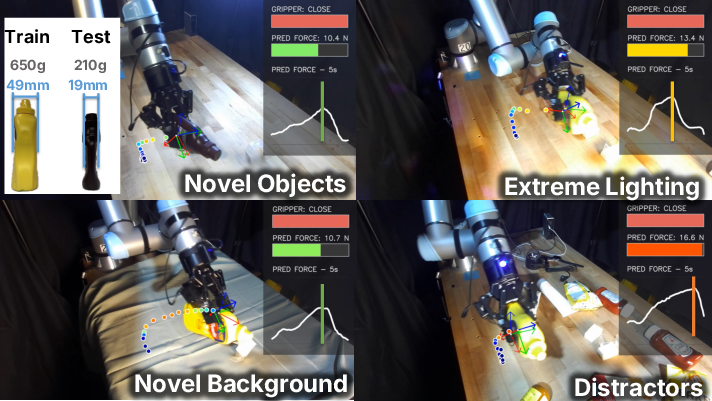
- Baselines that only controlled the gripper’s open/close state or its position couldn’t reliably produce the right squeeze—especially for rigid objects. The ForceBand approach produced object-specific force profiles (for example, light grips around ~3 N up to firmer squeezes around ~19 N).
- The learned force skills transferred to some new objects the robot hadn’t seen during training.
Why this matters: Many real-world tasks are all about the right amount of force—too little and things slip, too much and they break or deform. This approach gives robots that “feel” without needing expensive, full-hand gloves all the time.
What this could lead to
- More natural, scalable data collection: People can record demonstrations at home or work with just a wristband and a camera, creating big datasets that include force information.
- Better, safer robot helpers: Robots that know “how hard” to act can be safer and more reliable in homes, warehouses, and assistive settings.
- Lower cost, higher practicality: The wristband is relatively affordable and doesn’t get in the way like bulky gloves, making it easier to collect lots of training data.
Simple note on limitations:
- It still needs a quick per-user calibration using fingertip force sensors. In the future, bigger datasets or new calibration tricks might remove this step.
- Absolute force accuracy isn’t perfect, but it’s good enough to teach useful force behaviors—and robots can further fine-tune with their own sensors.
In short, ForceBand shows that listening to wrist muscles is a practical, effective way to teach robots how hard to act, not just where to move—bringing us closer to truly dexterous robot helpers.
Knowledge Gaps
Unresolved gaps, limitations, and open questions
Below is a single, concrete list of what remains missing, uncertain, or unexplored, focusing on actionable directions for future research.
- Cross-user generalization without calibration remains unclear: quantify zero-shot and few-shot performance across a larger, more diverse population (age, sex, hand dominance, skin properties, forearm morphology), and report how much calibration (minutes/samples) is minimally required per user.
- Longitudinal robustness is not evaluated: measure day-to-day and week-to-week drift due to electrode re-donning, skin impedance changes (sweat, temperature), strap tension, and placement shifts; study whether self-supervised adaptation can maintain accuracy over time.
- Session reusability and retention: does a single 15-minute calibration remain valid after donning/doffing cycles and over multiple days, or is re-calibration required; if so, how often and how long.
- Electrode placement sensitivity: quantify how far electrodes can deviate from the prescribed anatomical sites before accuracy degrades; develop placement-tolerant models or auto-localization procedures.
- Hardware generality: assess transfer from the OpenBCI/ADS-1299 setup to lower-cost, lower-SNR consumer boards and dry electrodes; characterize performance vs. SNR and electrode type (wet vs. dry vs. textile).
- Motion artifacts and noise: analyze susceptibility to cable microphonics, movement artifacts, and IMU-induced interference; benchmark filtering/adaptive interference cancellation strategies.
- Dataset scale and composition: the 10-hour dataset and 4 action categories are limited; report number of users and sessions, expand to more users, hands (left/right), environments, and broader manipulation taxonomies (e.g., twisting, insertion, cutting, wiping, bimanual tasks).
- Label fidelity of fingertip forces: FSRs provide only approximate normal force and are known to be nonlinear and hysteretic; validate against calibrated 6-axis load cells, include shear/torque labels, and release per-sensor calibration curves and uncertainty.
- Force dimensionality gap: the model predicts per-finger normal forces only; extend to 3D force vectors, torques, and contact locations to handle tasks requiring shear, torsion, and friction modulation.
- Temporal alignment uncertainty: quantify synchronization error among sEMG, IMU, FSRs, and video; study the impact of time misalignment on supervision and downstream policy success.
- Real-time performance is unreported: measure end-to-end latency (sampling → EMG2Force → policy → actuation), jitter, and compute/energy requirements on realistic embedded hardware; analyze how latency affects closed-loop force control.
- Windowing/look-ahead effects: the 5 s window could induce non-causal look-ahead; evaluate strictly causal inference windows and the accuracy/latency trade-offs for online control.
- Modeling ablations are under-specified: provide systematic comparisons of time-domain vs. spectrogram encoders, transformer vs. temporal CNNs, and the contribution of the wrist IMU across tasks and motion regimes.
- Multimodal fusion for force estimation is not explored: test whether combining vision with sEMG (rather than sEMG vs. vision) improves per-finger force prediction, especially under co-contraction and ambiguous muscle activations.
- Generalization to unseen grasps and postures: evaluate performance across varied wrist/elbow angles, pronation/supination, extreme finger postures, and high-dynamic actions; assess robustness to forearm muscle co-activation and fatigue.
- Calibration dependency on fingertip sensors: the paper notes this limitation but does not test sensor-free alternatives; prototype and benchmark fixture/object-based calibration protocols and quantify the accuracy gap vs. force-sensor-based calibration.
- Policy embodiment limitations: demonstrations produce per-finger forces, but the learned policy collapses to a single scalar “grip force” for a parallel-jaw gripper; investigate policies for multi-finger robot hands that exploit the full per-finger force vector.
- Commanded vs. realized force mismatch: how is the desired force executed without tactile or force-torque feedback; measure discrepancies between commanded and actual gripper forces and evaluate policies with closed-loop force sensing.
- Safety and constraint handling: no analysis of safety bounds (e.g., fragile objects) or constraint satisfaction; develop mechanisms to enforce force limits and detect/mitigate over-squeeze or slip in real time.
- Evaluation breadth: tasks are limited to pick–squeeze–place; add benchmarks for complex, contact-rich skills (unscrewing, tool use, peg-in-hole with tolerances, deformable manipulation, sliding with friction control, and bimanual coordination).
- OOD generalization characterization: OOD evaluation is anecdotal; systematically vary mass, shape, compliance, and surface friction to derive generalization curves and failure taxonomies.
- Visual retargeting reliability: quantify the effect of hand/object tracking errors, segmentation/inpainting artifacts, and occlusions on the quality of retargeted demonstrations and policy performance.
- Success metrics for “squeeze” are partly subjective: replace or complement human judgment with objective measures (e.g., force profile similarity, deformation metrics, work/impulse) to standardize evaluation.
- Data scaling laws: investigate how EMG2Force and policy performance scale with more demonstrations per object, more objects, and more users; identify diminishing returns and optimal data mixes (actions, objects, users).
- Environmental robustness: test under real-world variability (lighting, background clutter, clothing layers, perspiration) and during mobile use; report failure rates and mitigation strategies.
- Handedness and bilateral sensing: evaluate left vs. right hand, cross-hand transfer, and interference or complementary benefits from bilateral EMG sensing for bimanual tasks.
- Privacy and identifiability: sEMG can contain biometric signatures; analyze privacy risks and propose privacy-preserving training or obfuscation methods.
- Reproducibility details: provide full preprocessing pipelines (filtering, normalization, rectification), synchronization code, and complete open-source assets (trained checkpoints, hardware CAD, firmware) with licenses to ensure replicability.
Practical Applications
Below we translate the paper’s findings, methods, and innovations into concrete, real-world applications. Each item names the primary sector(s), describes the use case, suggests potential tools/products/workflows, and notes assumptions or dependencies that affect feasibility.
Immediate Applications
- Robotics (industrial R&D, labs) — Force-enriched demonstration collection for manipulation
- Use case: Capture human demonstrations that include per-finger force traces (via the wristband + EMG2Force) to train force-aware robot policies for pick–squeeze–place and similar contact-rich tasks.
- Tools/workflows: 3-step pipeline (15-minute calibration with fingertip sensors; collect video + sEMG; train flow-matching policy with force channel). Retargeting toolkit for human-to-robot transfer (SE(3) end-effector + gripper aperture + force token).
- Assumptions/dependencies: Short per-user calibration with fingertip force sensors; correct, muscle-aware electrode placement; robot platform supporting position + force commands; basic vision stack for hand/object tracking.
- Logistics and warehousing — Pilot deployments for object-specific gripping
- Use case: Improve handling of diverse packages (rigid, deformable, heavy/light) by training robots to apply object-specific forces learned from human demonstrations.
- Tools/products: Force-aware picking skill library; dataset expansion using low-cost sEMG data from workers performing typical picks; continuous/binary gripper baselines for A/B testing.
- Assumptions/dependencies: Facility-specific object set and camera coverage; domain-adapted retargeting; calibration protocol for selected demonstrators.
- Manufacturing (assembly and packing lines) — Force tuning for delicate parts
- Use case: Teach robots to insert press-fits, seat connectors, apply labels/tapes, or close lids with controlled force profiles derived from human experts.
- Tools/products: “Skill capture” kit (wristband + IMU + video + EMG2Force SDK) for process engineers; library of force trajectories tied to SKUs or task variants.
- Assumptions/dependencies: Repeatable fixtures; per-operator calibration; safety guardrails for max force; integration with torque/force sensors on the end-effector if available.
- Consumer/assistive robotics (research prototypes) — Safer, more reliable gripping
- Use case: Household manipulation prototypes (e.g., kitchen helpers) that avoid crushing or dropping by learning when/how hard to squeeze.
- Tools/workflows: On-robot fine-tuning with EMG-labeled demos; closed-loop force token predictions during deployment.
- Assumptions/dependencies: Generalization from lab objects to household items; camera occlusions addressed by the provided segmentation/inpainting pipeline.
- Human–robot interaction and teleoperation — Skill distillation from operators
- Use case: Record operator muscle effort during teleoperation or shadowing to learn autonomous force policies (e.g., valve turning, bottle opening).
- Tools/workflows: EMG2Force labeling of existing teleop video; policy distillation with force channel as supervision target.
- Assumptions/dependencies: Teleop interface with synchronized video; calibration for each operator.
- UX research and product testing — Measuring hand forces without gloves
- Use case: Evaluate packaging “openability,” button press force, or consumer device ergonomics while preserving natural hand appearance (no bulky gloves).
- Tools/products: EMG wristband + EMG2Force inference; optional transparent gel finger cots for limited ground-truth sessions.
- Assumptions/dependencies: Brief per-user calibration; force accuracy sufficient for relative comparisons rather than metrology-grade measurements.
- Education (robotics, HCI, biomedical engineering) — Teaching multimodal robot learning
- Use case: Course modules on robot learning from human videos, sEMG signal processing, and force-aware policy training.
- Tools/products: Open-source bill of materials (≈$300), dataset (10 hours), baselines, and training scripts; hands-on labs replicating the EMG2Force pipeline.
- Assumptions/dependencies: Access to a robot arm (or simulation) and standard compute; safe electrode handling and placement.
- Prosthetics and rehabilitation research — Rapid prototyping of force intent decoding
- Use case: Lab experiments on estimating intended pinch/grip force from wrist sEMG for myoelectric prostheses or hand orthoses.
- Tools/workflows: EMG2Force as a baseline model; 15-minute calibration procedure; integration with orthosis control loops.
- Assumptions/dependencies: Clinical approvals for human-subjects studies; careful electrode placement and hygiene; current accuracy suited for research rather than clinical deployment.
- Ergonomics and safety analytics — Monitoring overexertion risks
- Use case: Non-intrusive monitoring of repeated high-force hand tasks to flag potential ergonomic risks in dynamic environments where cameras are unreliable.
- Tools/products: Wearable sEMG logging + periodic EMG2Force calibration; dashboards with force-time exposure metrics.
- Assumptions/dependencies: Per-worker calibration; privacy/compliance with biometric data policies; acceptable variability across shifts and electrode re-donning.
- Software/ML tooling — Force labeling-as-a-service for imitation learning
- Use case: Augment video datasets with estimated per-finger force channels to boost performance of imitation learning policies.
- Tools/products: EMG2Force inference API/SDK; dataset converters that attach force tokens to action sequences; integration with diffusion/flow-matching policy trainers.
- Assumptions/dependencies: Access to synchronized sEMG + video during data collection; GPU resources for spectrogram + transformer inference; DINOv3-based encoders.
Long-Term Applications
- Robotics (consumer and service) — General-purpose, force-aware home robots
- Use case: Robust grasping of deformable packaging, child-safe handling, safe cleanup, and kitchen tasks with object-specific force modulation learned from large-scale human demos.
- Tools/products: Pretrained “force foundation models” for manipulation; turnkey wristband kits for in-home data collection; auto-retargeting to diverse robot hands.
- Assumptions/dependencies: Cross-user generalization with little/no calibration; reliable vision under heavy occlusion; certification for safe applied forces in homes.
- Industrial automation — Complex force-sensitive assembly at scale
- Use case: Cable routing, snap fits, connector seating, gasket compression, torque-limited fastening—trained from expert demonstrations with force priors.
- Tools/products: Enterprise-grade EMG2Force pipelines; digital work instruction systems embedding force profiles; policy validation suites with force compliance checks.
- Assumptions/dependencies: Domain shift handling (materials, tolerances); integration with F/T sensors for online correction; governance for updates to force policies.
- Prosthetics and exoskeletons — Calibration-light force intent control
- Use case: Daily-use prostheses that infer desired pinch/grip force from wrist sEMG with minimal calibration, improving dexterity, safety, and user comfort.
- Tools/products: Embedded EMG2Force inference on low-power chips; adaptive calibration routines; clinician-facing setup apps.
- Assumptions/dependencies: Regulatory clearance; robust cross-user models; skin–electrode consistency over long-term wear; safe actuation limits.
- Teleoperation and haptics — Intention-aware shared autonomy and feedback
- Use case: Robots infer intended force from operator sEMG and provide assistance or haptic cues (e.g., “soft stop” when over-squeezing), improving precision in remote manipulation (surgery, inspection, disaster response).
- Tools/products: Bidirectional teleop stacks (intent decoding + haptic feedback); predictive displays with force overlays; safety envelopes driven by force intent.
- Assumptions/dependencies: Low-latency signal processing; standardized sEMG interfaces; rigorous testing in high-stakes domains.
- Foundation models for manipulation — Multimodal force–vision models
- Use case: Train large models that align sEMG/IMU, vision, and action/force trajectories to generalize across objects, users, and robots.
- Tools/products: Massive multimodal datasets (video + sEMG + force + proprioception); pretraining toolchains; open benchmarks for per-finger force prediction and policy transfer.
- Assumptions/dependencies: Scaled data collection with strong privacy guarantees; standardized file formats and metadata; compute budgets for spectrogram-augmented transformers.
- Smart tools and grippers — Embedded force policies learned from humans
- Use case: Grippers and handheld tools that adapt squeeze/press forces on-device (e.g., pickup tools for fragile items, automated packaging sealers).
- Tools/products: Edge-deployed EMG2Force-derived policies; sensor fusion with tactile/pressure arrays; quick-swap skill cartridges per SKU.
- Assumptions/dependencies: Hardware support for fine-grained force control; ruggedization; continual learning for drifting conditions.
- Healthcare and home rehabilitation — At-home progress tracking via force intent
- Use case: Longitudinal monitoring of hand function (e.g., post-stroke) with non-intrusive wearables estimating grip dynamics during daily activities.
- Tools/products: Companion apps summarizing force profiles; therapist dashboards; exercise adherence feedback loops.
- Assumptions/dependencies: Medical-grade validation; privacy-by-design; calibration-free or caregiver-guided simple calibration.
- Workforce training and certification — Force-aware skill capture
- Use case: Document and teach tacit skills (how much to push/pull/squeeze) for technicians and craft workers; assess competency based on safe force envelopes.
- Tools/products: Training modules with force “gold standards”; VR/AR overlays of desired force trajectories; automated coaching.
- Assumptions/dependencies: Sector-specific standards for acceptable forces; variability across users; buy-in from unions and safety officers.
- Policy and standards — Privacy, safety, and interoperability for sEMG in workplaces
- Use case: Establish guidelines for biometric data handling (sEMG), acceptable force thresholds for collaborative robots, and standardized sEMG data schemas.
- Tools/products: Compliance checklists; reference implementations for anonymization and on-device processing; conformance test suites for force-aware policies.
- Assumptions/dependencies: Multi-stakeholder coordination (industry, academia, regulators); harmonization with existing robot safety standards (e.g., ISO/TS 15066).
- Consumer electronics and XR — sEMG-based per-finger force input
- Use case: Subtle pinch/press force as an input modality for AR/VR or wearables, enabling richer interactions than binary gestures.
- Tools/products: XR SDKs that expose normalized per-finger force signals; app design patterns using continuous force as control.
- Assumptions/dependencies: Commodity wristbands with stable electrodes; calibration-free models; app ecosystem support.
Common Assumptions and Dependencies Across Applications
- Short per-user calibration currently uses fingertip force sensors; the paper suggests future sensor-free calibration or larger models to reduce/remove this step.
- Accurate, muscle-aware electrode placement is critical; misplacement or high skin–electrode impedance degrades performance.
- Generalization across users, objects, and tasks improves with dataset scale; cross-user models are an explicit long-term goal.
- Vision pipelines (segmentation, inpainting, tracking) must be robust under occlusion; otherwise, retargeted motion may introduce noise despite good force prediction.
- Robots need controllable force/torque behaviors (or at least reliable gripper force regulation) to exploit the learned force channel.
- Privacy, consent, and governance are required for collecting and storing sEMG (biometric) data, especially in workplaces and healthcare.
Glossary
- 6-D rotation representation: A continuous parameterization of 3D rotations using six numbers to avoid discontinuities and ambiguities seen in Euler angles or quaternions. "6-D rotation representation"
- 6-DoF: Six degrees of freedom describing 3D pose (three for position and three for orientation). "6-DoF pose"
- anatomically guided electrode placement: Positioning electrodes based on underlying muscle anatomy to capture more informative biosignals. "anatomically guided electrode placement"
- aperture: The opening width of a gripper or fingers used during grasping. "a 1-DoF aperture "
- binary contact detection (BCD): Classification of whether contact is present or absent between hand and object. "binary contact detection (BCD)"
- biopotential: Small electrical potentials produced by biological tissues, measured for physiological sensing. "low-noise biopotential acquisition"
- bipolar differential sensing: Measuring the voltage difference between paired electrodes to suppress common-mode noise and motion artifacts. "bipolar differential sensing"
- common-mode noise: Interference that appears similarly on multiple electrodes and can be canceled by differential measurement. "common-mode noise"
- conditional flow matching: A training objective that learns a velocity field to transport a simple distribution to a target distribution conditioned on inputs. "conditional flow matching~\cite{lipman2023flow}:"
- DINOv3: A self-supervised vision transformer encoder used for feature extraction. "DINOv3 \cite{simeoni2025dinov3}"
- egocentric video: First-person video captured from the wearer’s viewpoint. "egocentric video"
- embodiment-agnostic representation: A task representation independent of a specific robot body or hardware. "an embodiment-agnostic representation"
- end-effector: The robot’s tool or gripper at the tip of the kinematic chain that interacts with objects. "end-effector pose"
- flow matching: A generative modeling technique that matches probability flows between distributions. "flow matching transformer policy"
- force-sensitive resistor: A thin-film sensor whose resistance changes with applied force, enabling force measurement. "force-sensitive resistors"
- Gaussian prior: A normal distribution used as the simple starting distribution in generative transport. "a Gaussian prior"
- IMU: An inertial measurement unit that senses linear acceleration, angular velocity, and often orientation. "paired with an IMU."
- inpaint: To algorithmically fill in removed or occluded regions of an image. "segment and inpaint the human arm"
- out-of-distribution (OOD): Data points or objects that differ from those seen during training. "out-of-distribution (OOD) objects."
- parallel-jaw robot: A robot gripper with two parallel jaws that open and close to grasp objects. "a parallel-jaw robot"
- PR AUC: Area under the precision–recall curve, summarizing performance under class imbalance. "We report PR AUC, the area under the precision-recall curve"
- prevalence-matched random baseline: A baseline predictor that guesses positives at the same rate as their prevalence in the data. "prevalence-matched random baseline"
- retargeting: Mapping human motion trajectories into robot-executable actions or poses. "retargets human hand motion to a robot embodiment"
- RGB-D: Sensing modality providing synchronized color (RGB) and depth (D) data. "RGB-D observations"
- ROC AUC: Area under the receiver operating characteristic curve, measuring trade-offs between true and false positive rates. "ROC AUC compresses above $0.85$"
- SE(3): The Lie group of 3D rigid-body transformations combining rotation and translation. "an end-effector pose "
- sEMG: Surface electromyography; recording muscle electrical activity from the skin. "Surface electromyography (sEMG) offers an unobtrusive proxy for the muscle activations that generate finger forces"
- short-time Fourier transform (STFT): A time–frequency analysis that applies Fourier transforms over sliding windows. "short-time Fourier transform (STFT)"
- signal-to-noise ratio (SNR): A measure comparing the strength of the desired signal to background noise. "an SNR of $119.5$"
- spectrogram: A 2D visualization of signal energy across time and frequency. "The spectrogram representation helps the network capture frequency features of muscle activity"
- transformer decoder: The decoder component of a transformer architecture that generates sequences conditioned on inputs. "passed to a transformer decoder, which predicts the fingertip force"
- velocity field: A vector field specifying instantaneous directions of change used to transport samples in flow-based training. "regresses a velocity field that transports a Gaussian prior"
- visuomotor policy: A control policy that maps visual observations to motor commands. "a flow-matching visuomotor policy for force control."
Collections
Sign up for free to add this paper to one or more collections.