- The paper introduces GeoTransolver with FLARE, a transformer-based operator learning framework integrating geometry-aware context and low-rank attention for surrogate modeling in crash dynamics.
- It evaluates four temporal prediction strategies, showing that one-shot and time-conditional formulations reduce error propagation and computational cost.
- Comprehensive experiments demonstrate a 33–44% error reduction and 2× lower memory footprint, validating high-fidelity predictions for complex crash scenarios.
High-Fidelity Automotive Crash Dynamics Prediction via Geometry-Aware Operator Learning with Memory-Efficient Low-Rank Attention
Contextual Motivation and Problem Definition
The analysis of vehicle crashworthiness is fundamentally constrained by the high computational overhead associated with nonlinear FEA required for controlled deformation, energy dissipation, and regulatory compliance. Traditional FEA-driven design iterations must model large geometries, diverse materials, contact nonlinearities, and transient structural evolution. Current ML-based surrogate models have not fully addressed the challenges of industrial-scale crash analysis, particularly for full-vehicle dynamics where multi-scale geometric context, long-range coupling, and temporal fidelity are paramount. The present work advances geometry-aware operator learning with a memory-efficient low-rank attention backbone, demonstrating practical surrogate modeling for automotive crash scenarios.
GeoTransolver and FLARE: Architectural Advancements
The paper leverages GeoTransolver, a transformer-based operator learning framework with explicit multi-scale geometric context projection and physics-aware attention. GeoTransolver features a context projector combining geometry, boundary conditions, and global parameters to feed into each transformer block via cross-attention, which is critical for persistent geometric grounding through all layers. Physics-attention using learnable physical slices reduces complexity to O(N), where each slice encodes local features and enables linear complexity in mesh density.
A core architectural modification is integrating FLARE (Fast Low-rank Attention Routing Engine) into GeoTransolver's backbone, replacing standard physics-attention self-attention with a low-rank latent communication mechanism. FLARE avoids quadratic complexity by factorizing attention through sets of M≪N global queries, executing encode-decode token routing in O(NM), with the output retaining geometry-aware context via cross-attention. As a result, GeoTransolver with FLARE reduces memory overhead by ∼2× and shrinks parameter count (∼500k fewer) while increasing accuracy—an essential property for industrial-scale meshes.
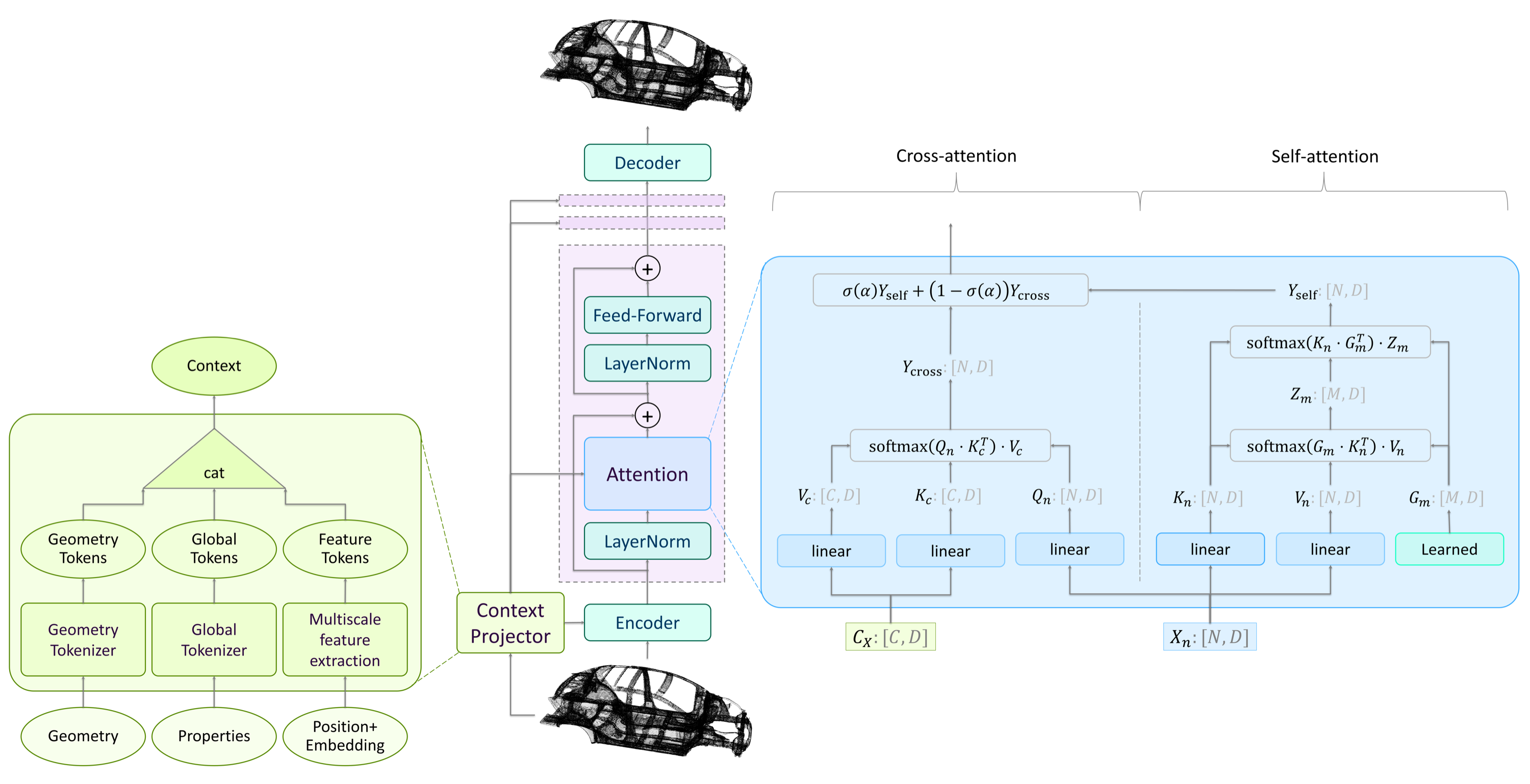
Figure 1: GeoTransolver with FLARE architecture, showing the geometry-aware context projector (Left) and FLARE-based attention block (Right).
Temporal Dynamics Prediction Strategies
Crash dynamics prediction requires careful formulation, given temporal nonlinearity and instability. Four temporal modeling strategies are evaluated: autoregressive (AR) rollout, teacher forcing, one-shot mapping, and time-conditional mapping. AR and teacher forcing enforce strict causality but accumulate errors recursively, while one-shot and time-conditional strategies use parallel prediction and continuous querying to avoid error propagation and reduce inference cost to O(1). Robustness and stability in long-range trajectories are found to be superior in one-shot and time-conditional formulations, with one-shot exhibiting optimal trade-off between computational efficiency and accuracy.
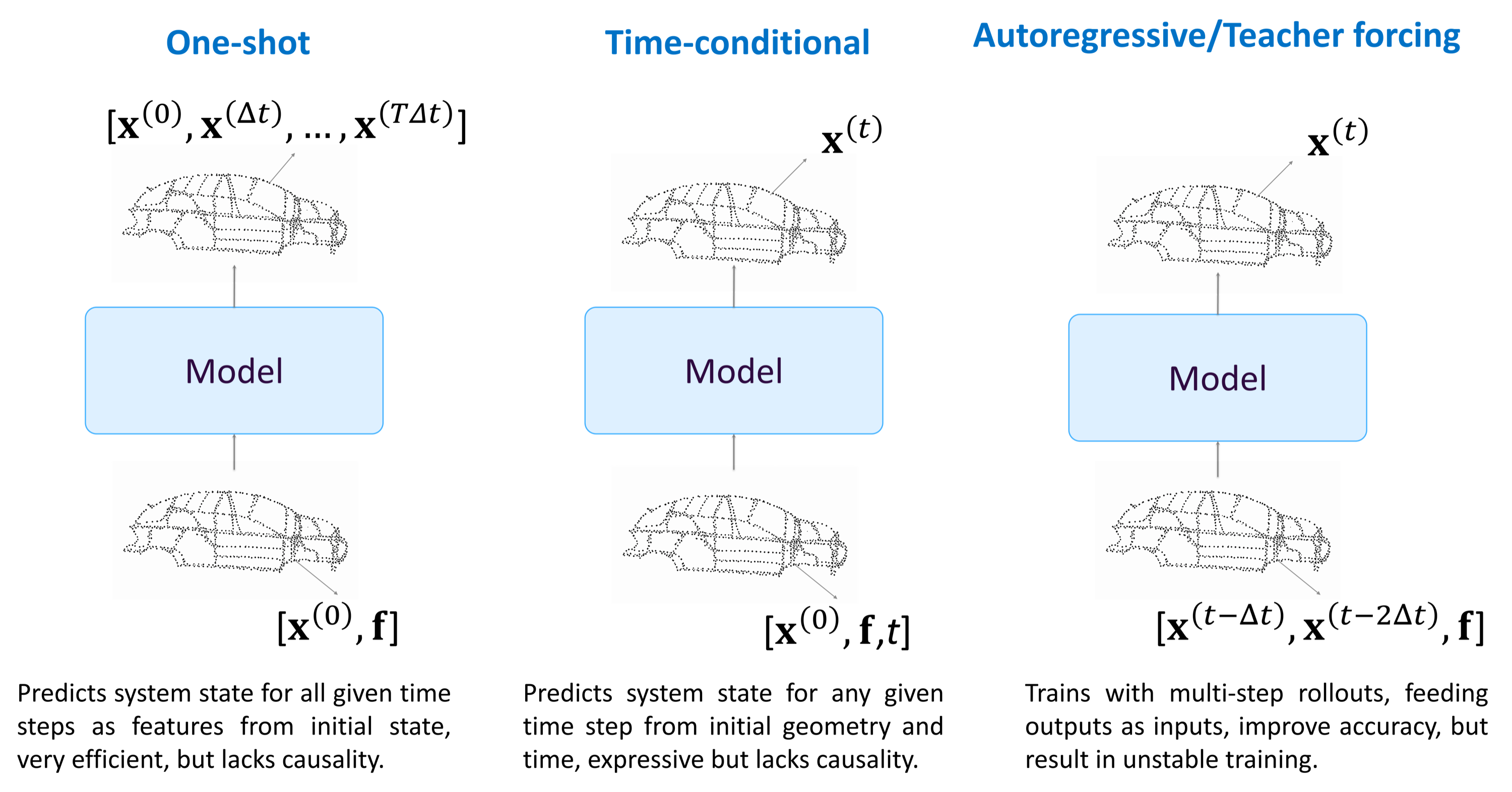
Figure 2: Schematic illustration of temporal dynamics prediction strategies.
Datasets and Experimental Design
Two high-fidelity crash datasets are used: (i) a parametric bumper beam impact dataset generated via OpenRadioss, with 135 distinct geometric and material configurations, and (ii) an NHTSA BIW full-vehicle frontal crash dataset simulated using LS-DYNA, comprising 150 design variations and ∼400k mesh nodes. Both datasets are structured for training, validation, and test splits, and include detailed spatiotemporal data. Critical probe locations on the BIW data (toe pan accelerations at driver and passenger sites) were chosen as benchmarks for occupant safety performance.
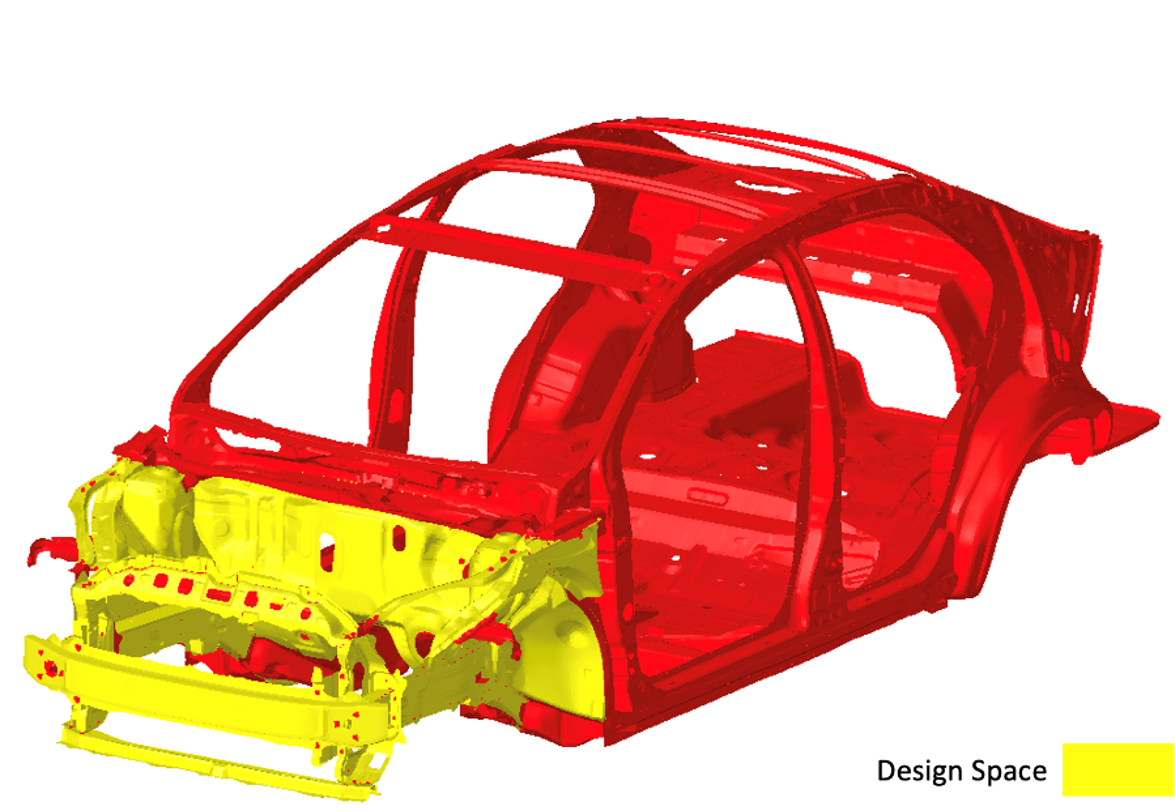
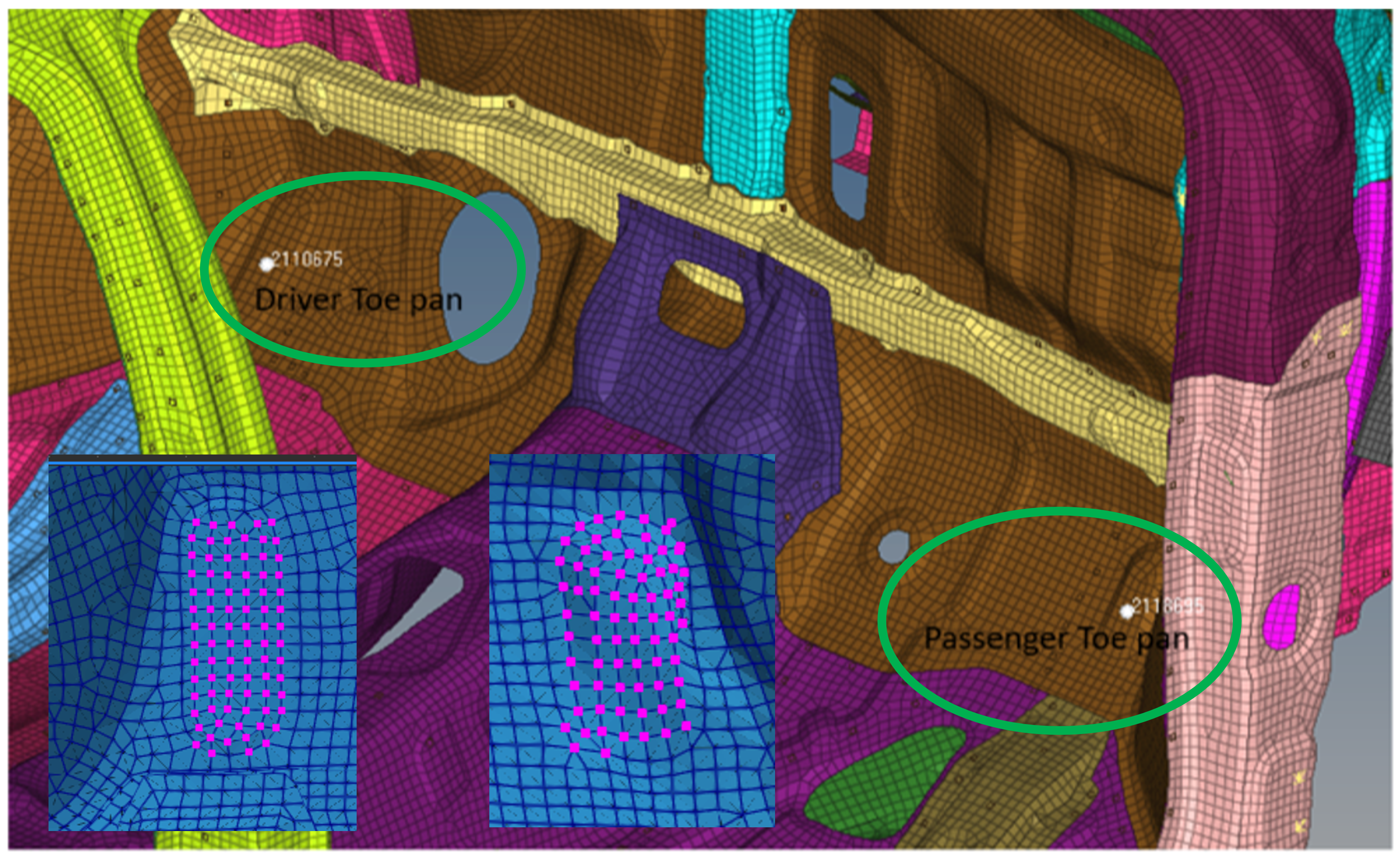
Figure 3: Left: Structural parts encoded in the BIW crash design space. Right: Probe points for acceleration evaluation at driver and passenger toe pans.
Quantitative Model Comparisons
Comprehensive comparative analysis was performed between Transolver, baseline GeoTransolver (physics attention), and GeoTransolver with FLARE. FLARE consistently demonstrated superior accuracy on both bumper beam and BIW datasets, achieving lowest L2 test errors and enhancing stability over temporal horizons. With Muon optimization, GeoTransolver with FLARE reduced test L2 error by ∼33% (relative to GeoTransolver) and M≪N0 (relative to Transolver) on the car crash dataset. Memory efficiency was validated, with FLARE's architecture achieving faster training speeds and reduced attention-block peak memory consumption.
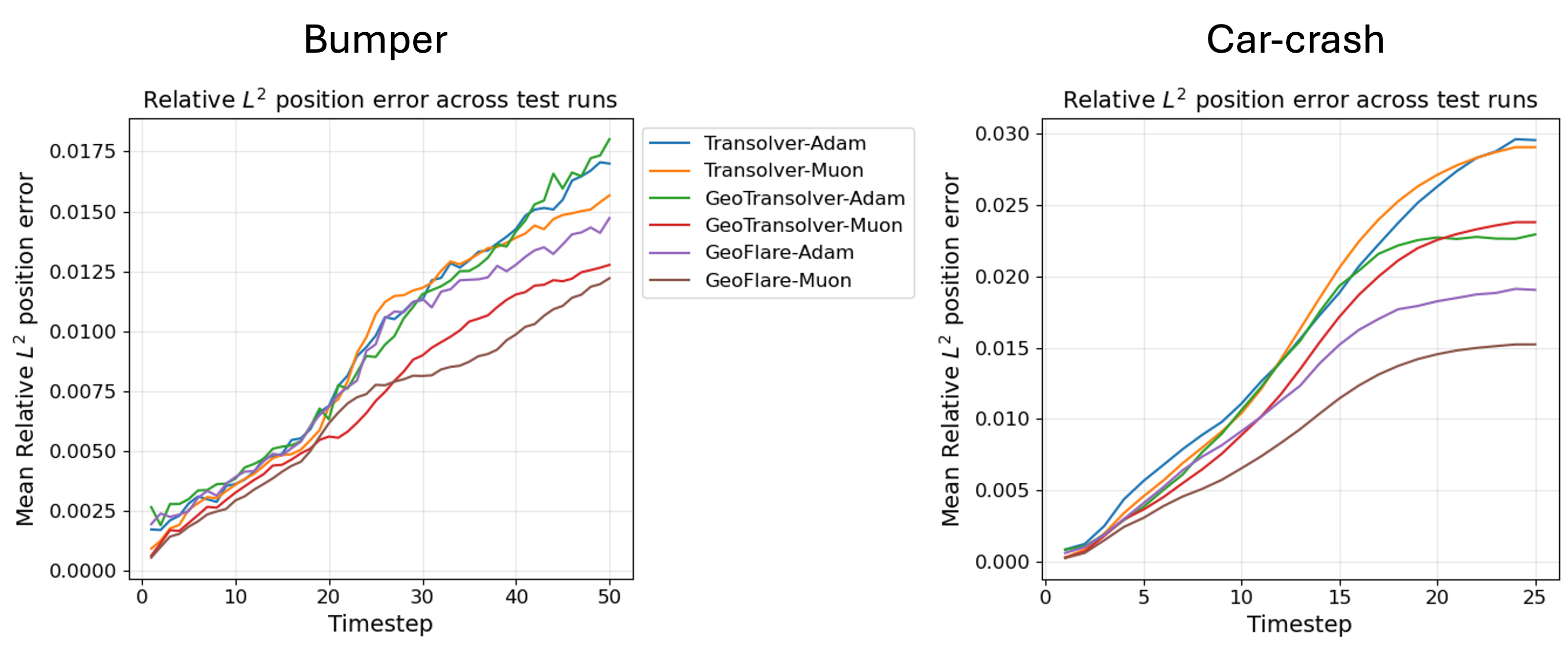
Figure 4: Temporal evolution of relative M≪N1 test error across the prediction horizon for various model architectures and optimizers.
Qualitative Results
Visual evaluation confirmed high-fidelity geometric predictions by GeoTransolver with FLARE. On both full-vehicle and bumper beam benchmarks, predicted deformation states closely match FEA ground truth in spatial collapse, buckling, and transient energy absorption, maintaining accuracy throughout the event. At driver and passenger toe pan locations, kinematic profiles (position, velocity, acceleration) predicted by GeoTransolver with FLARE rapidly and accurately resolve the nonlinear transients govern occupant safety.
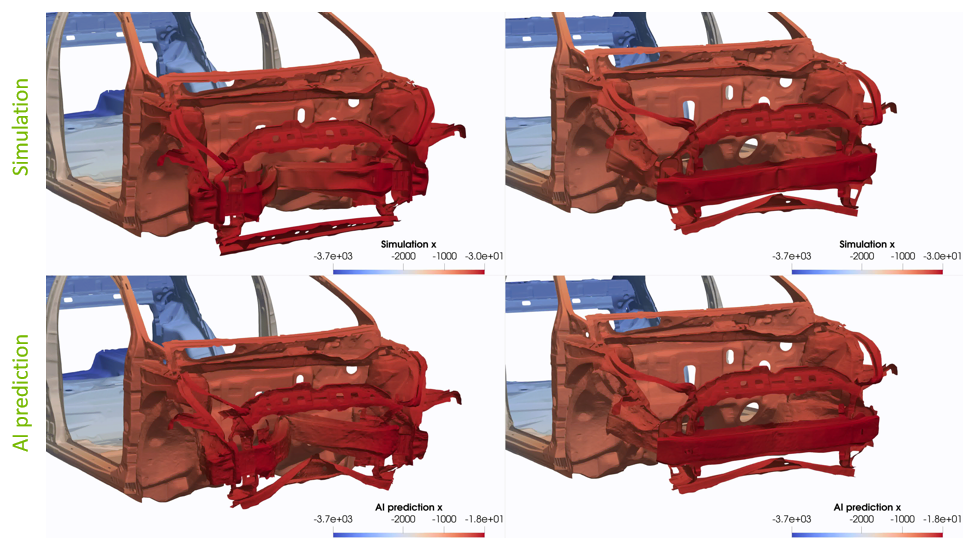
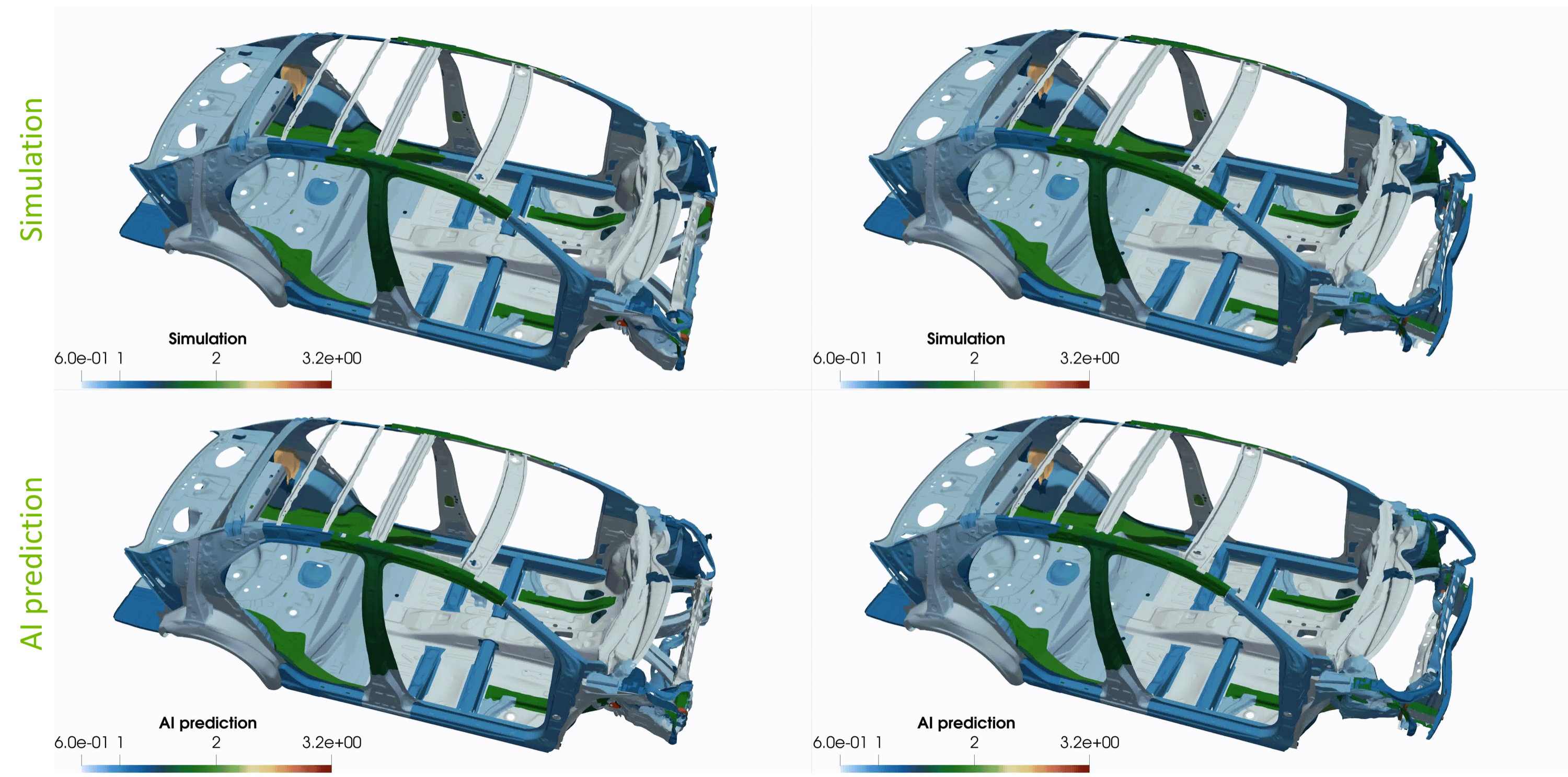
Figure 5: Front view of car crash test samples comparing FEA ground truth and GeoTransolver predictions.
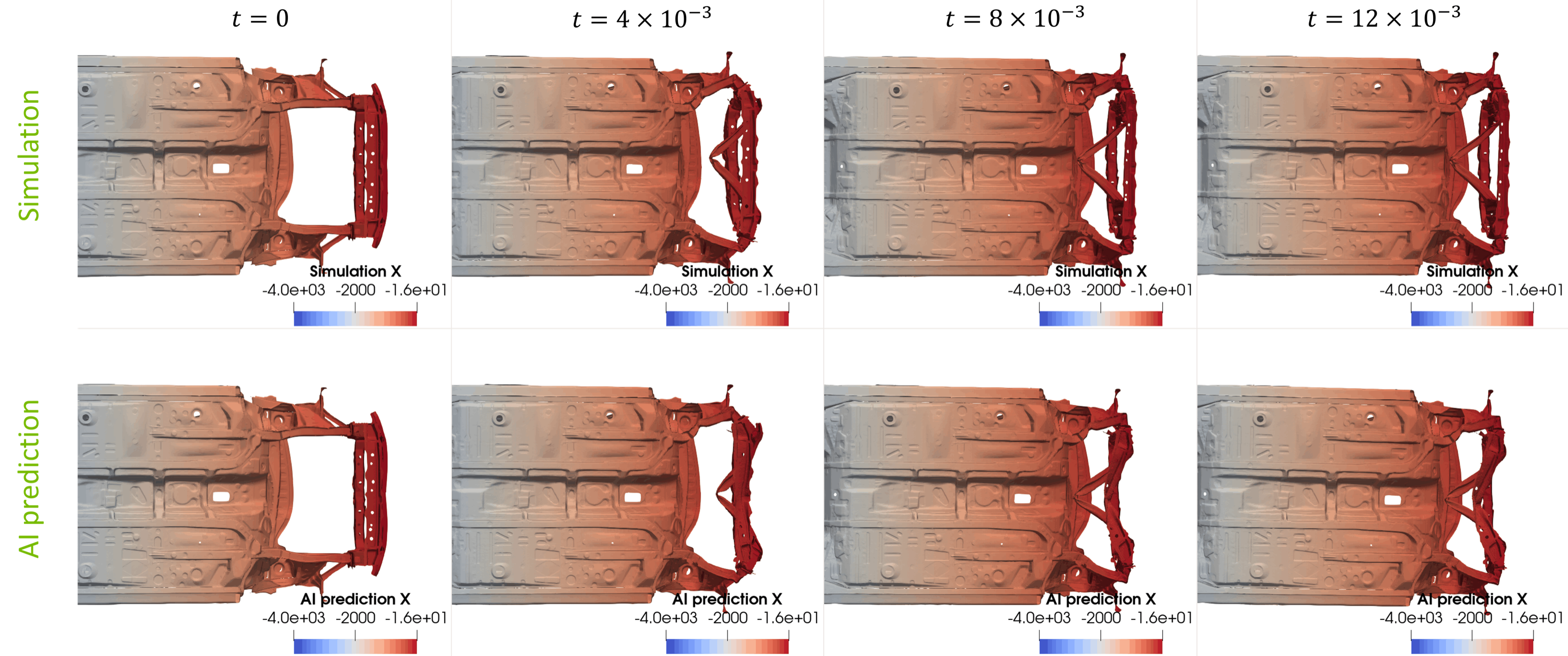
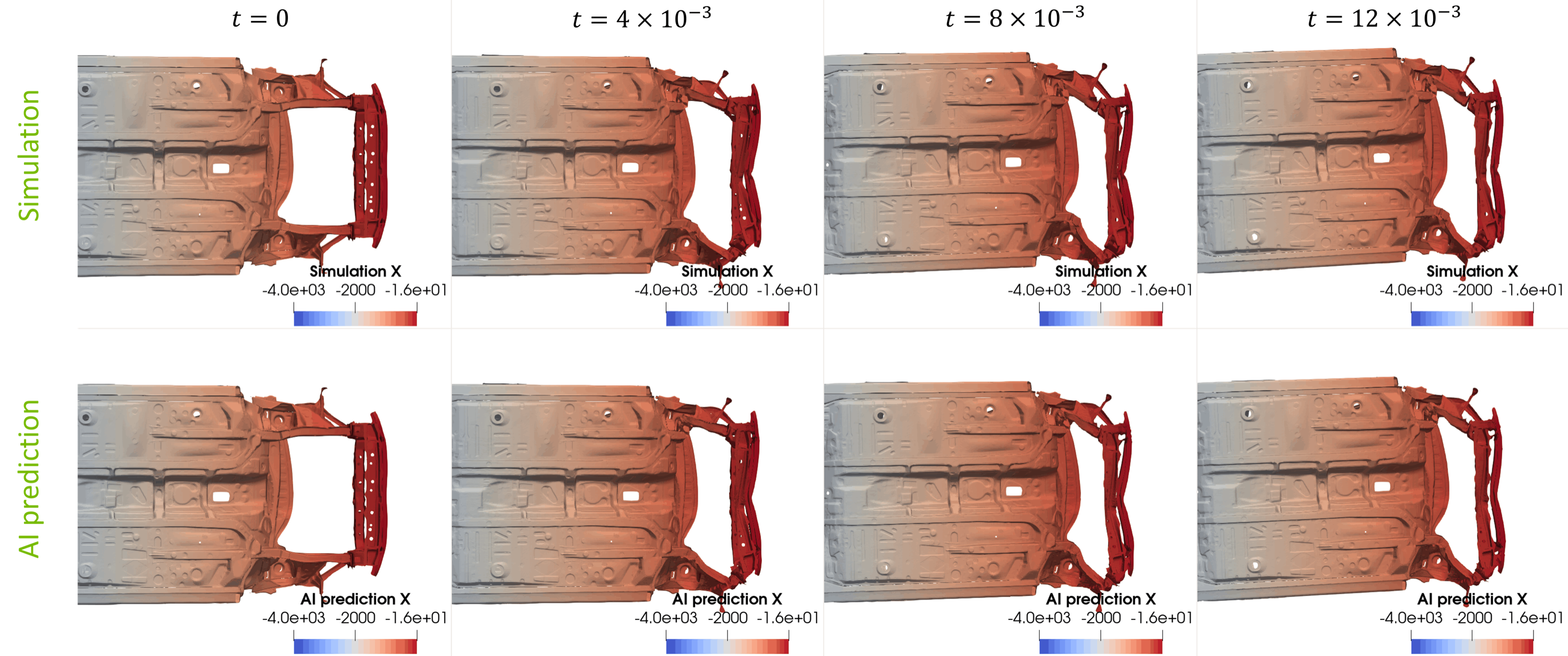
Figure 6: Temporal geometric deformation of car crash test samples during impact.
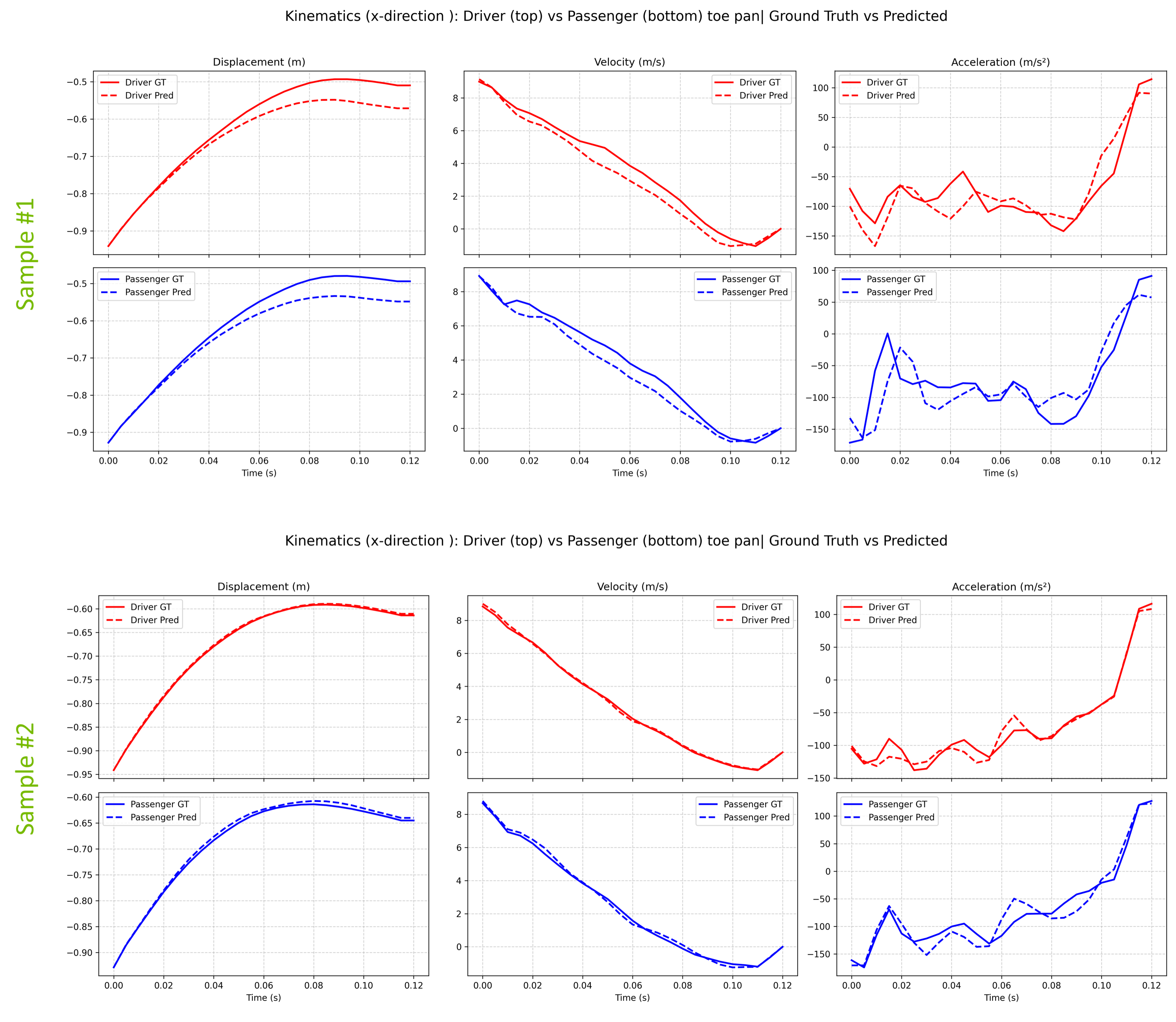
Figure 7: Comparison of time-resolved kinematic profiles at toe pan probe points: FEA vs. GeoTransolver (position, velocity, acceleration).
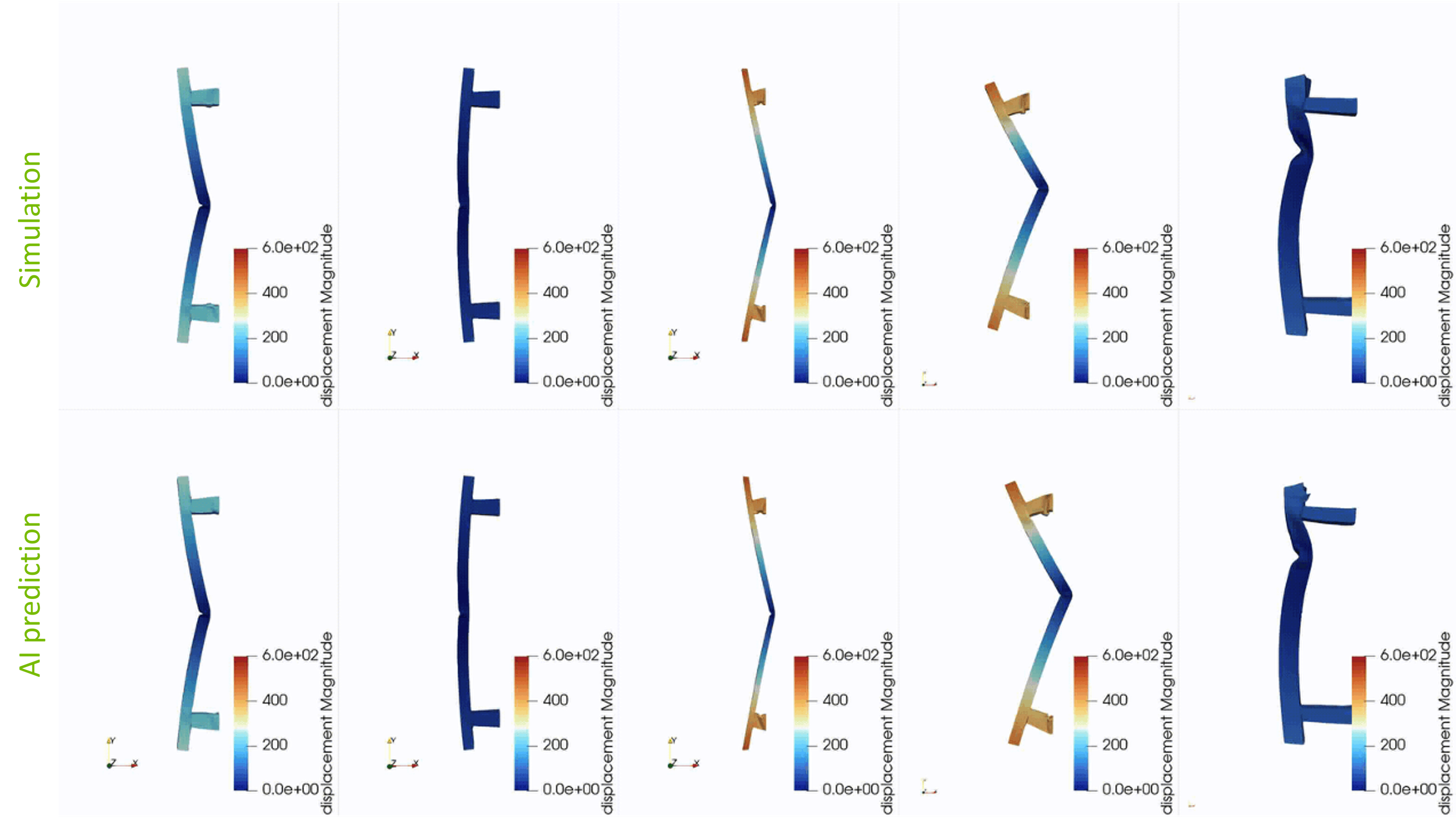
Figure 8: Final deformation states for five bumper beam test samples; ground truth (top row) vs. GeoTransolver prediction (bottom row).
Implications and Forward Outlook
These results substantiate the practical viability of geometry-aware operator learning using memory-efficient low-rank attention for industrial-scale crash modeling. The FLARE backbone enables accurate surrogate modeling even as mesh density and structural complexity scale. Robust one-shot and time-conditional strategies mitigate temporal drift, enabling efficient design iterations for crashworthiness optimization.
The ability to resolve critical occupant-region acceleration with high fidelity has both immediate practical implications (rapid, accurate design screening for regulatory compliance) and theoretical implications for neural operator learning in large-scale, nonlinear physical systems. Looking ahead, expanding GeoTransolver to more diverse vehicle architectures and impact scenarios, integrating broader material and topology distributions, and pursuing foundation model-style transferability for structural dynamics could substantially reduce reliance on traditional FEA.
Conclusion
The integration of geometry-aware context projection and memory-efficient low-rank attention (FLARE) within the GeoTransolver framework demonstrates high-fidelity surrogate prediction of complex crash dynamics at industrial scale. GeoTransolver with FLARE achieves M≪N2 reduction in memory footprint and M≪N3–M≪N4 error reduction relative to baseline architectures, accurately resolving nonlinear deformation and occupant-region acceleration profiles. These advances provide a robust foundation for accelerated, AI-driven surrogate modeling in safety-critical automotive engineering, with future pathways toward generalized operator learning for nonlinear structural dynamics (2605.27758).