- The paper introduces a hybrid mesh–attention surrogate that combines local GNN message passing with global physics-aware attention to accurately predict full-vehicle crash dynamics.
- The method leverages sparse contact modeling to achieve a 3× improvement in RMSE and preserve critical safety metrics such as occupant survival space.
- The approach accelerates simulation from hours to seconds, enabling scalable design exploration and industrial crash screening.
Mesh-Based Graph Neural Networks and Physics-Aware Attention for Crash Simulation Surrogates
Full-vehicle crash simulations are a computational bottleneck for iterative design exploration and safety screening in automotive engineering due to the high cost of explicit finite-element (FE) solvers. This work investigates mesh-based neural surrogates and hybrid architectures for time-resolved structural deformation prediction under lateral pole-impact—a load case featuring severe nonlinear dynamics and evolving contact, representative of industrial safety benchmarks.
The surrogate models formulate the task as fully autoregressive forecasting on a structural mesh graph, where nodal positions and velocities are used to predict acceleration fields. Autoregressive rollout integrates these predictions temporally, providing closed-loop crash sequence inference. The methodology aims not only for scalar nodal accuracy but for preservation of downstream safety-critical metrics, such as occupant survival space, which quantifies intrusion via the Euclidean distance between reference compartment nodes.
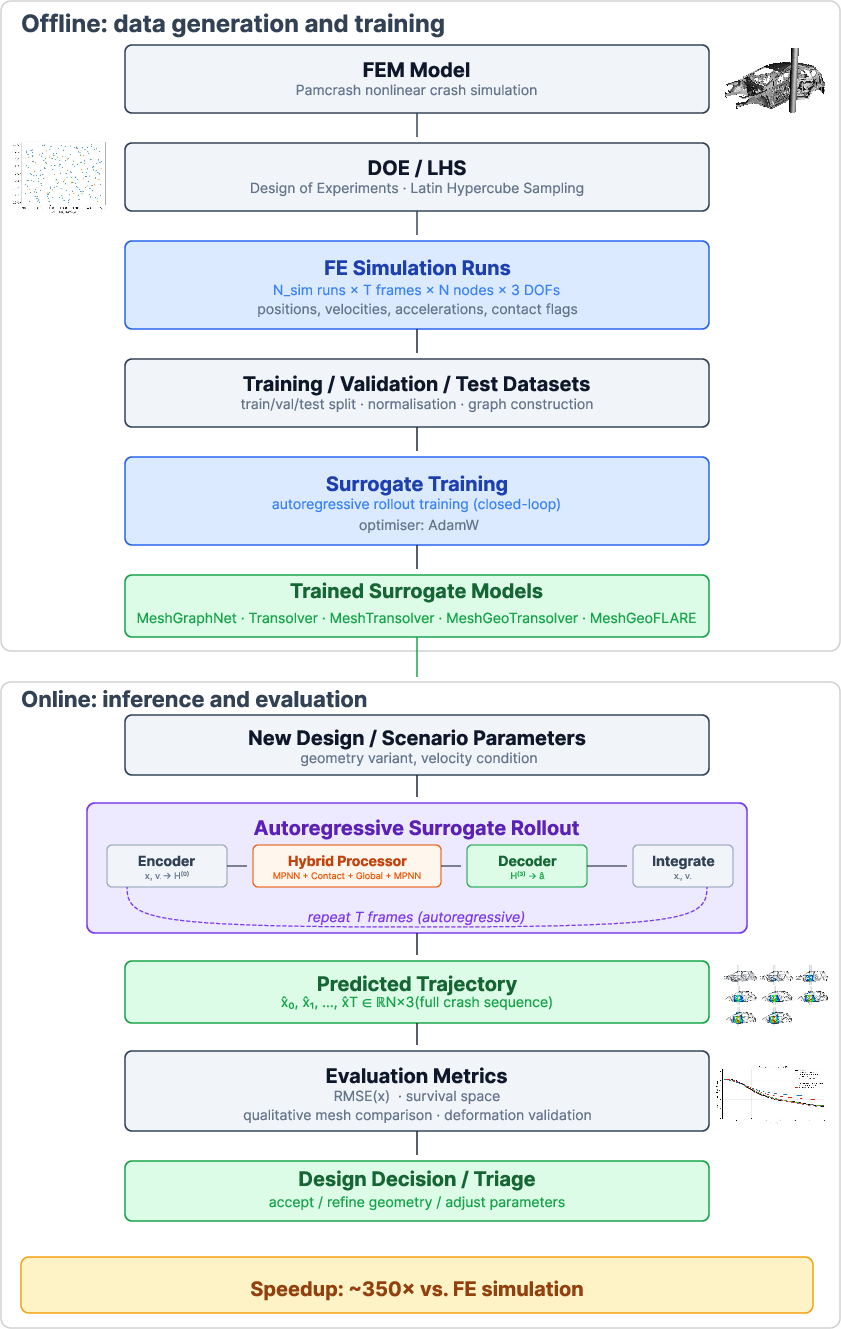
Figure 1: End-to-end pipeline replacing explicit FE simulation with neural surrogate inference, reducing evaluation time from hours to seconds while retaining safety-critical evaluation.
Background: Local, Global, and Hybrid Surrogate Models
Mesh-based GNNs (e.g., MeshGraphNet) leverage the FE mesh connectivity for strong locality and inductive bias, capturing fine-grained deformation but exhibiting restricted long-range communication. Transformer-style scientific surrogates (e.g., Transolver, GeoTransolver) achieve efficient global interaction via token-based attention, compressing the nodal state for scalable propagation at the cost of diminished local structural fidelity. Geometry-aware attention variants (GeoTransolver, GeoFLARE) further condition global attention on spatial context and geometry, while FLARE-like factorisations reduce computational overhead.
Hybrid architectures aim to synergize mesh-local message passing for neighborhood structure with global token-based attention for efficient communication across large-diameter graphs. Here, explicit sparse contact modelling is introduced as a dynamic correction mechanism, identifying proximity interactions during rollout and injecting them prior to global propagation.
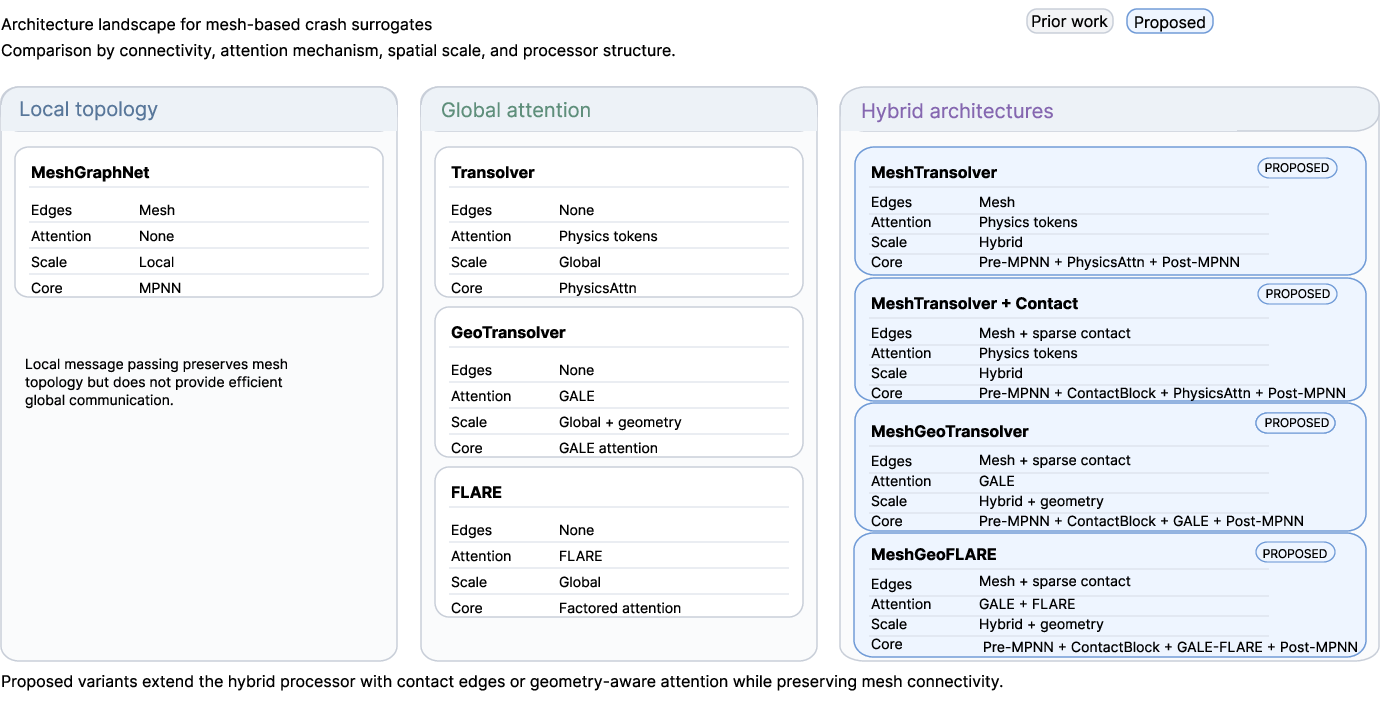
Figure 2: Comparison of mesh-based surrogate architectures: local MPNN, global/token-based attention, and hybrid combinations with extensions for contact and geometry-aware attention.
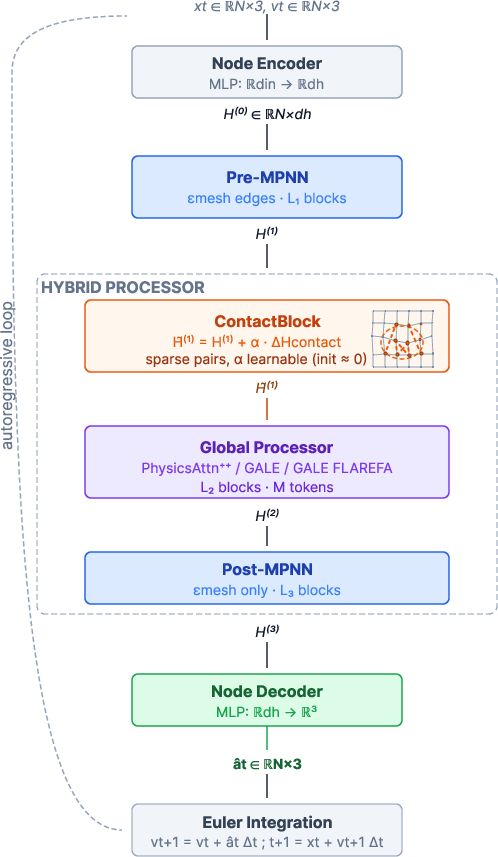
Figure 3: Hybrid processor: pre-MPNN extracts mesh-level features, global processor handles long-range interactions, and post-MPNN restricts refinement to the mesh.
All models employ an encoder–processor–decoder structure, with architectural variations in the processor stage. Hybrid variants comprise pre-MPNN, global processor (PhysicsAttention++, GALE), and post-MPNN blocks. The sparse contact block executes a proximity-based search, thickness filtering, and top-k sparsification per rollout step, injecting bounded residual latent updates before the global stage.
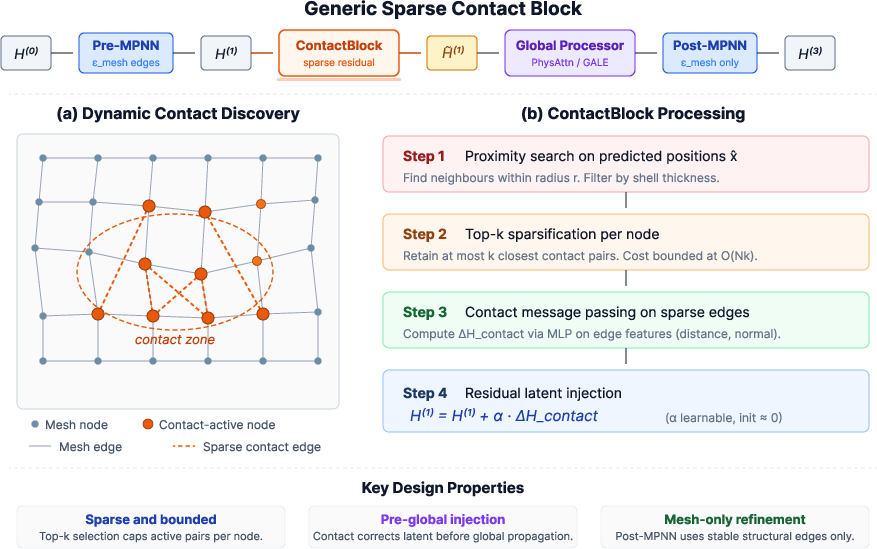
Figure 4: Generic sparse contact block: dynamic proximity search and sparsification for contact graph, with latent correction injected prior to global processing.
Autoregressive rollout is maintained; contact-aware variants recalculate sparse contact per step, ensuring predictive stability during closed-loop simulation.
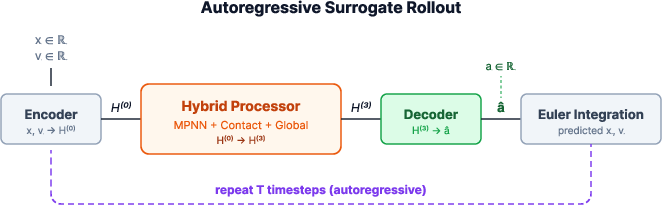
Figure 5: Autoregressive rollout: prediction, integration, and feedback with contact-aware variants recomputing sparse contact.
Experimental Setup: Benchmark and Evaluation
A proprietary, parameterized full-vehicle FE model is used for lateral pole-impact simulation, sampling an 8D design space (crash kinematics, geometry, sheet thickness) via Latin Hypercube Sampling for 200 high-fidelity crash runs. The dataset is split into consistent training, validation, and test cohorts, assessed for statistical representativeness.
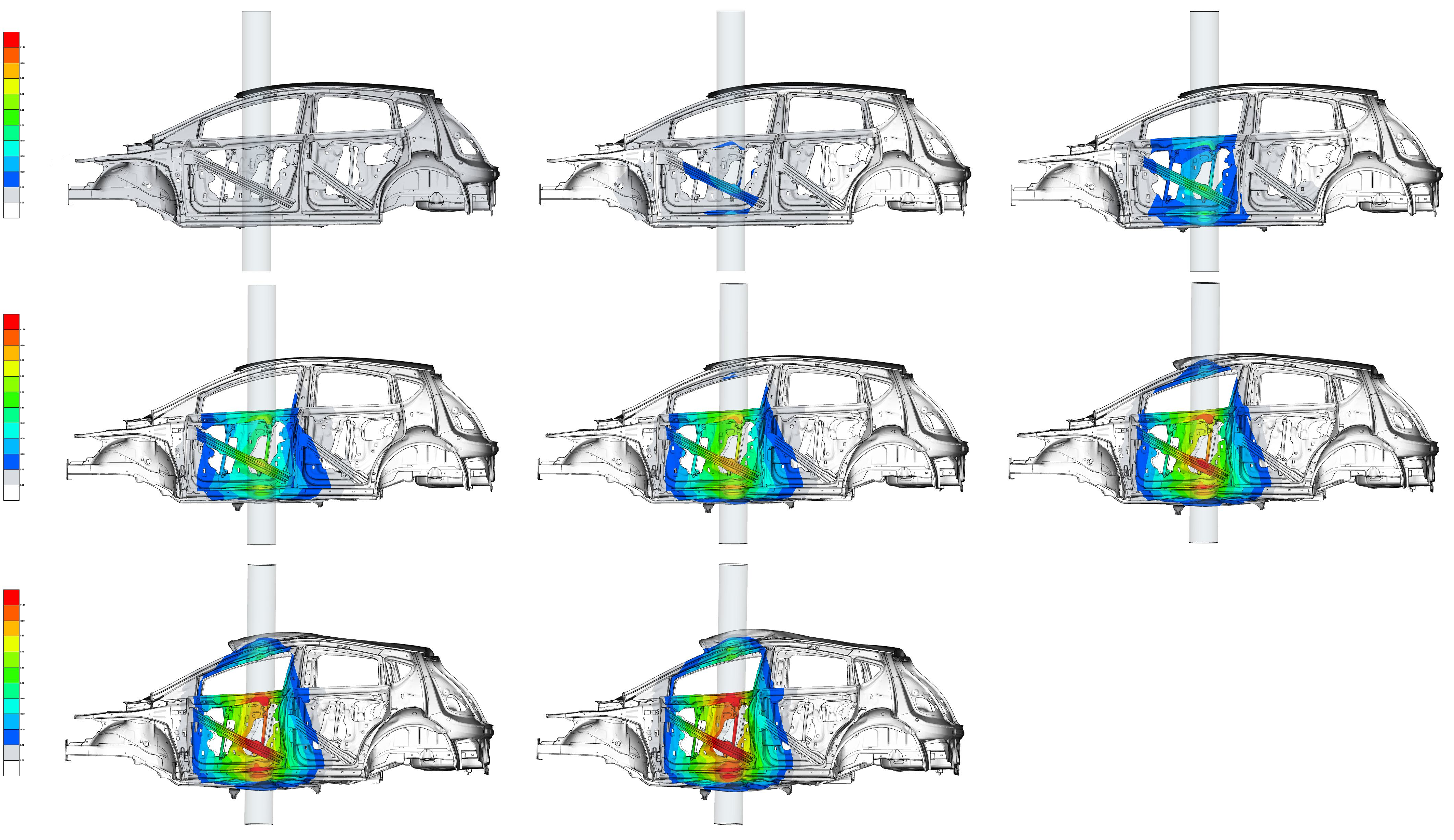
Figure 6: Temporal evolution of pole-impact benchmark—progressive intrusion and redistribution of deformation over time.
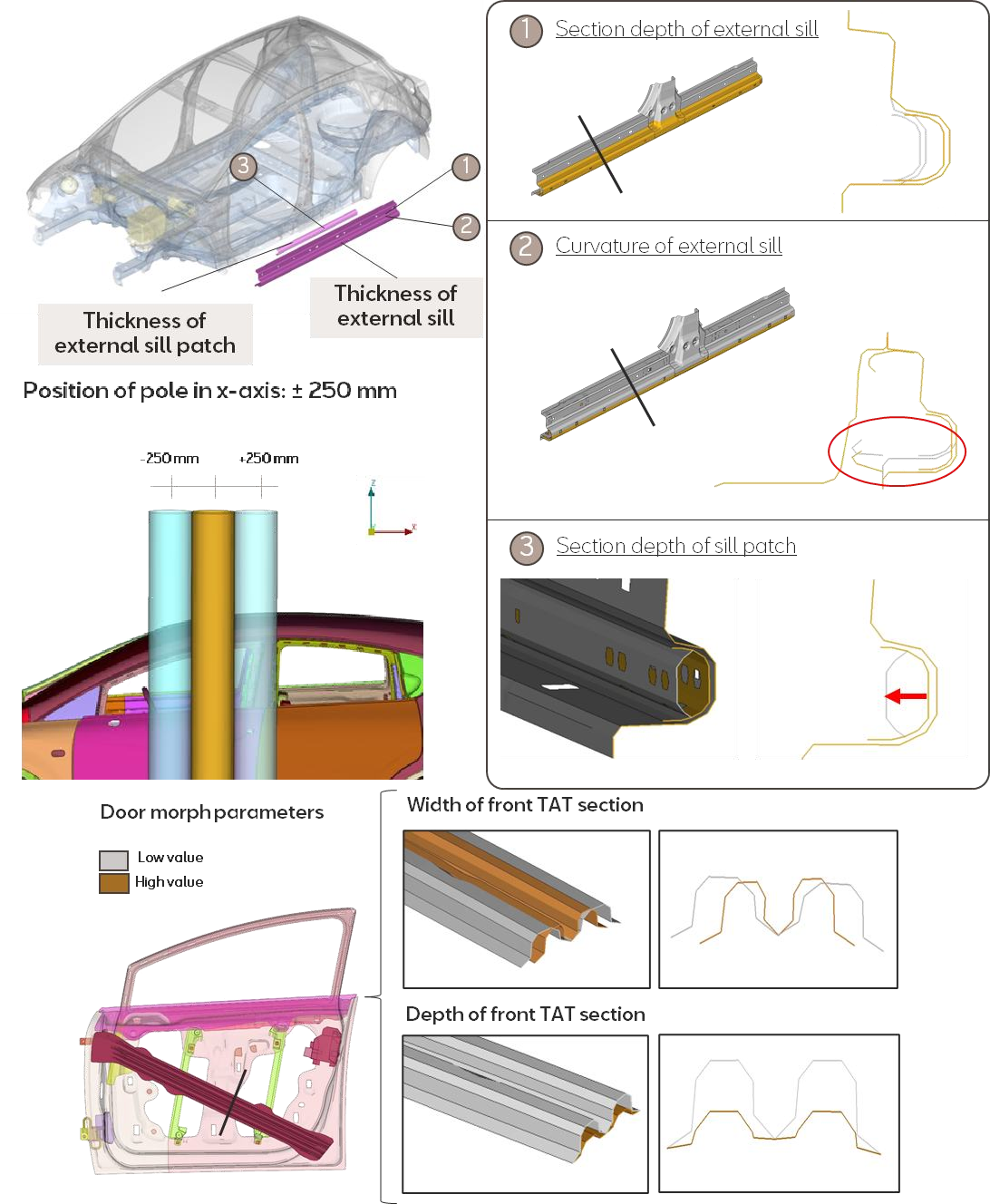
Figure 7: Parameterized full-vehicle model with DOE variation in geometry and pole position.
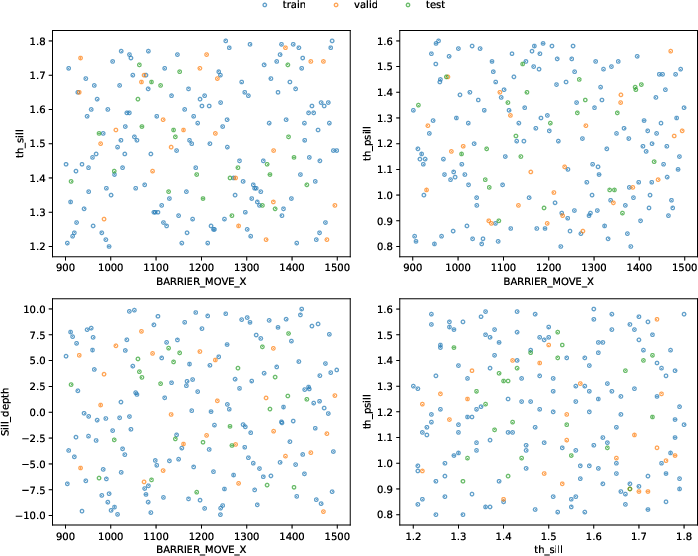
Figure 8: Pairwise design variable distribution—consistent coverage in training, validation, and test splits.
All models use controlled hyperparameters (hidden dimension, tokens, contact sparsity), batch size 1 (full rollout per optimization step), and are trained under identical protocols for comparability. Metrics include temporal mean RMSE, final-step RMSE, relative RMSE, and occupant survival-space error.
Hybrid mesh–attention models, particularly MeshGeoFLARE, achieve the lowest temporal mean RMSE (3.20 mm) and final-step relative error (0.0137), outstripping both pure mesh-based and pure global attention architectures. Geometry-aware attention improves global accuracy but introduces localized spatial noise, compromising field regularity for interpretability.
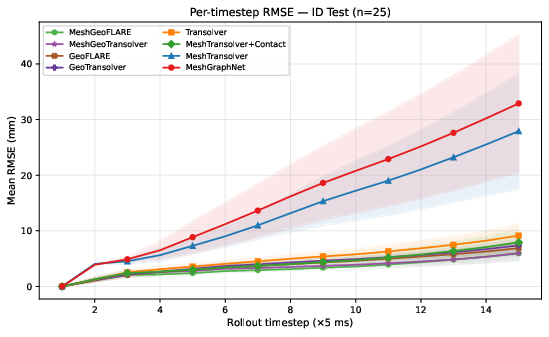
Figure 9: Per-timestep RMSE—hybrid models show more stable error accumulation over rollout.
Explicit sparse contact modeling yields a 3× improvement in RMSE within the MeshTransolver family—best performance occurs when contact dynamics become structurally relevant.
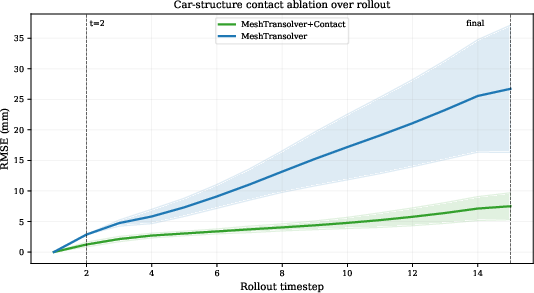
Figure 10: Effect of sparse contact modeling—largest gain aligns with early-impact regime when contact becomes critical.
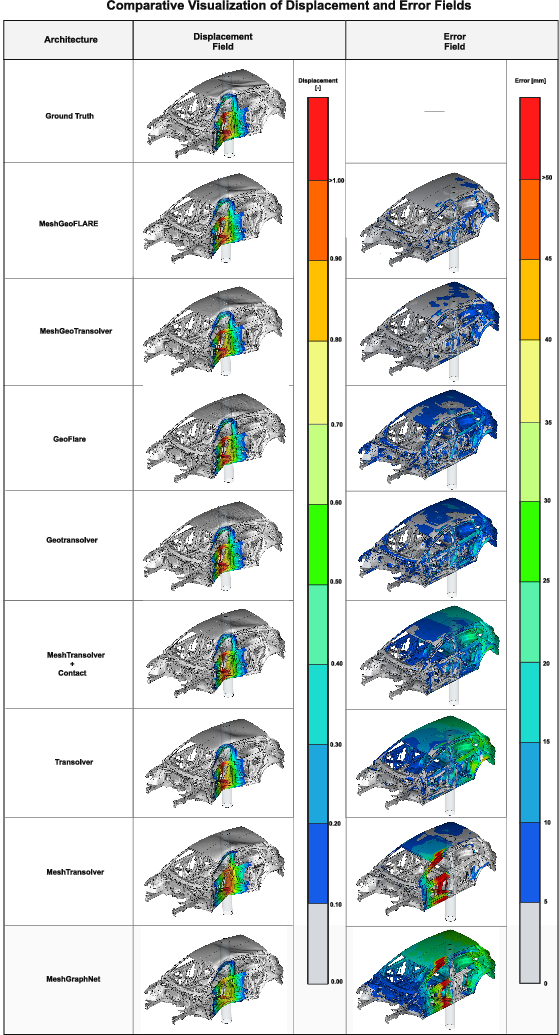
Figure 11: Ground-truth and predicted deformation for representative cases—hybrid models reproduce both global and local patterns faithfully.
Field-level qualitative analysis demonstrates that hybrid variants preserve structural plausibility, maintaining displacement-field smoothness and physically interpretable folding, while pure attention models introduce spatial irregularities.
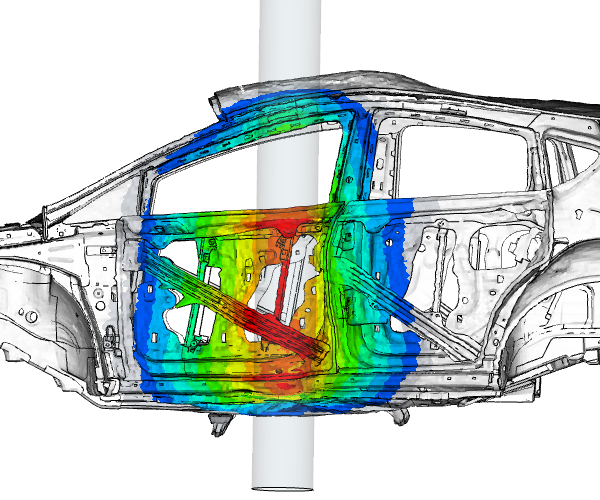
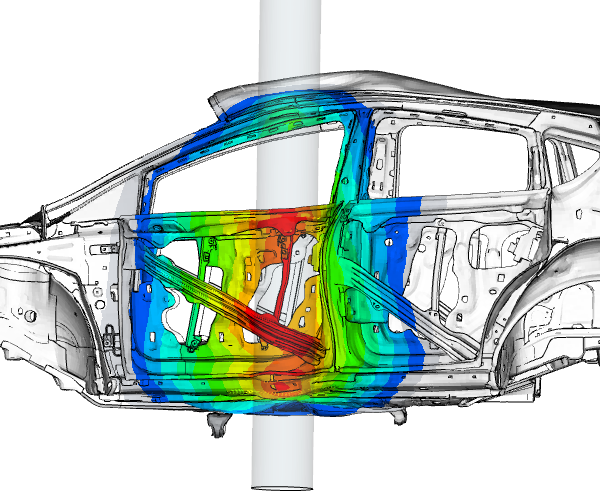
Figure 12: GeoTransolver.
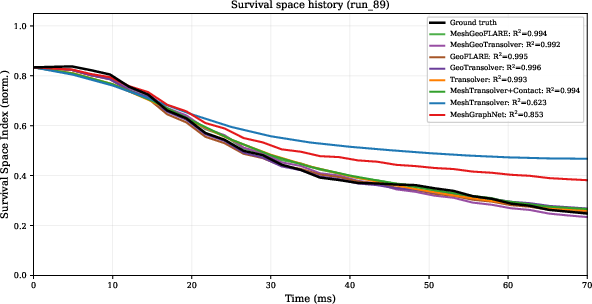
Figure 13: Occupant survival-space distance—hybrid models closely track temporal evolution including compression and rebound; survival distance is normalized.
Survival-space error, a downstream safety metric, shows hybrids with moderate negative bias (MeshGeoFLARE: -4.2 mm) and lowest spread (SD ∼10 mm), outperforming both pure mesh and pure attention models. Contact-free MeshTransolver demonstrates non-conservative bias (+46 mm), remedied via sparse contact injection. Consistency rather than mean error alone is critical for industrial screening.
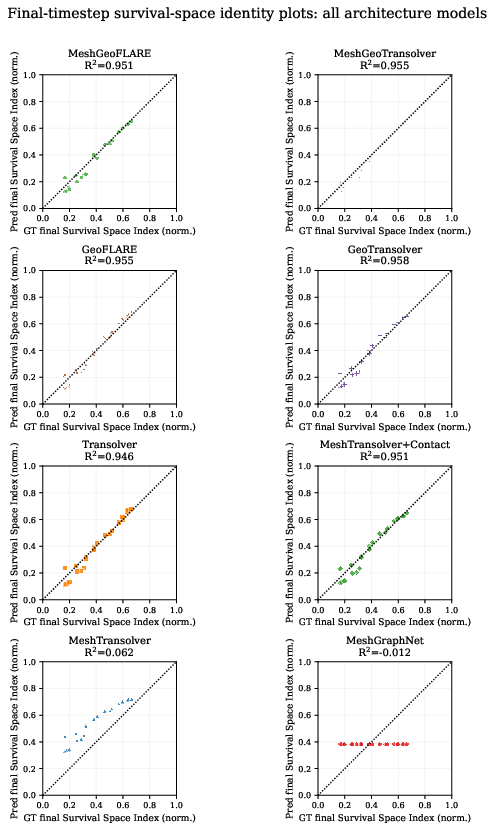
Figure 14: Predicted vs. reference survival distance—strongest models cluster near diagonal, indicating low bias and spread.
Computational Efficiency and Practical Implications
Once trained, surrogates deliver rollouts in seconds (2.6 s/design), compared to minutes for reduced FE models and up to 15 hours for full-scale vehicles, with speedups ranging from 350× to 2×104. This enables large-scale DOE screening and rapid iteration, unattainable with FE solvers alone.
Discussion: Architectural Lessons and Future Directions
Hybrid mesh–attention architectures exhibit superior performance through joint local–global propagation and contact-aware correction. Geometry-aware attention, effective for global crash kinematics, risks spatial noise unless anchored to mesh connectivity. Sparse contact injection is empirically effective, especially for early-impact regime prediction, aligning with the intended role as an informative, scalable correction mechanism.
Survival-space is crucial for downstream industrial evaluation, clarifying that field-level metrics (RMSE) are necessary but not sufficient—design screening depends on preservation of bias and spread in safety-critical metrics. Architectural capacity correlates with accuracy, offering trade-offs for practitioners considering production latency and precision.
Challenges remain: extension to broader crash scenarios, stronger out-of-distribution testing, safety-aware objectives, uncertainty quantification, and optimization for hyperparameter configurations. Future work should address these aspects, including robust contact modeling under distributional shift.
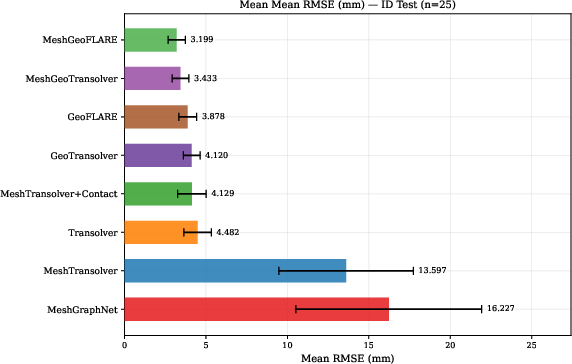
Figure 15: Model ranking by RMSE—hybrid mesh–attention architectures lead, supported by quantitative performance and field regularity.
Conclusion
Hybrid mesh–attention surrogates, particularly geometry-aware variants with explicit sparse contact modeling, attain superior accuracy and structural interpretability for full-vehicle crash simulation under autoregressive rollout. Beyond global error minimization, occupant survival-space preservation validates practical utility for industrial design screening. The framework delivers orders-of-magnitude acceleration, supporting deployment-oriented DOE analysis. Results recommend combining mesh-local inductive bias, scalable global communication, and contact-aware injection as a robust direction for crash surrogate architecture. Future advancements will benefit from broader crash scenarios, uncertainty quantification, and adaptive safety-oriented objectives.