- The paper presents the GRCA algorithm that inverts ray-triangle filtering to use emitter geometry for culling unnecessary intersection tests.
- It employs a two-pass SAT/BAT pipeline with GACP-based projections to classify triangles and precisely determine angular ray spans.
- The method achieves significant speedup over BVH-based methods, reducing per-frame computational costs and memory requirements in dynamic scenes.
Geometrically Approximated Modeling for Emitter-Centric Ray-Triangle Filtering in Arbitrarily Dynamic LiDAR Simulation
The paper presents the Gajmer Ray-Casting Algorithm (GRCA), an emitter-centric, acceleration-structure-free approach to high-throughput LiDAR simulation in highly dynamic scenes. GRCA abandons the canonical ray-centric perspective and instead determines, for each scene triangle, which rays may plausibly intersect it, subsuming both static and dynamic geometry with no reliance on per-frame acceleration structure rebuilds. This inversion aligns well with spinning LiDAR regimes and enables dramatic cost reductions over state-of-the-art BVH-based methods.
Motivation and Limitations of Conventional Approaches
Conventional LiDAR simulation relies heavily on BVHs (Bounding Volume Hierarchies), as exemplified by frameworks like OptiX and Embree. Although BVHs cull large portions of scene geometry for each ray, major limitations arise for arbitrarily dynamic scenes:
- Rebuild cost in dynamic settings: With deforming or rapidly moving geometry, BVHs must be rebuilt every frame, incurring a cost linear in the scene’s triangle count regardless of how little changes.
- Ray-incoherence in 360°/180° LiDARs: Spinning LiDARs produce highly incoherent rays, preventing acceleration via ray-bundling. BVH traversal loses much of its purported efficiency in such settings.
- No pre-traversal triangle filtering: In BVH workflows, triangles are assessed only after ray activation. Upfront filtering based on geometric context or emitter placement is missing, leading to many unnecessary intersection tests, especially for triangles out of range or angular reach.
- Platform dependence: Many ray tracing optimizations are hardware-centric; GRCA is agnostic to both compute vendor and underlying hardware acceleration.
Emitter-Centric Geometric Modeling in GRCA
GRCA conceptualizes LiDAR simulation within an emitter-centric framework. The process inverts the intersection query: for each scene triangle, it uses a closed-form, emitter-centered geometric model to infer the span of LiDAR channels/rays that could possibly hit it, leveraging three key observations:
- Minimal per-triangle work: The optimal strategy tests only rays (indexed by vertical channel and horizontal “ray” within a channel) whose directions pass through the triangle.
- GACP construction: Each LiDAR channel traces out a conic (or planar) surface as the emitter rotates, unifying all rays in the channel into a single surface—named the Geometrically Approximated Cone or Plane (GACP).
- Apparent area law for filtering: Projecting the triangle into the emitter’s frame enables classification based on apparent area: most triangles subtend a footprint much smaller than a LiDAR channel/ray, allowing for aggressive culling or approximate treatment.
This geometric modeling enables efficient per-triangle computation of the precise integer spans [Cfrom,Cto]×[Rfrom,Rto] for the ray grid, vastly reducing the number of intersection tests.
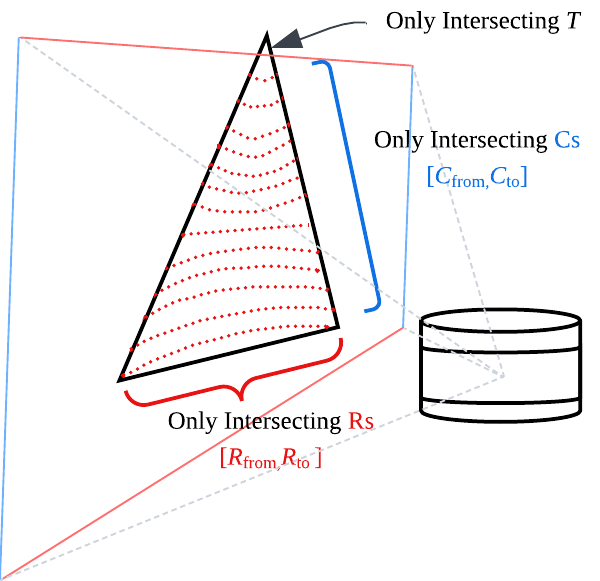
Figure 1: Per-triangle ray filtering; only the indexed span [Cfrom,Cto]×[Rfrom,Rto] is tested for candidate intersections.
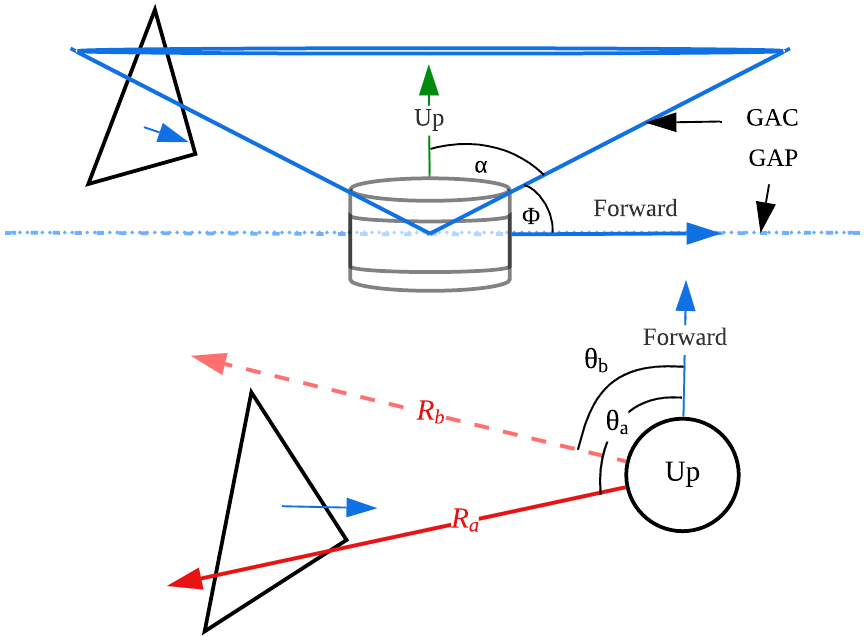
Figure 2: GACP surface and angular indexing for emitter-centric channel (vertical) and ray (horizontal) selection.
Algorithmic Pipeline: Two-Pass SAT/BAT Classification
GRCA applies a two-pass emitter-centric pipeline exploiting the above geometric properties:
- Early Pass: For each triangle,
- Applies origin-centric geometric filters (back-face culling, apparent area threshold, distance/range check).
- Predicts the angular channel/ray span using vertex projections, classifying the triangle as a Smaller-Appearing Triangle (SAT) or Bigger-Appearing Triangle (BAT) using tunable span thresholds.
- Runs inline intersection checks for SAT triangles; defers BATs for precise evaluation.
- Late Pass: For each deferred BAT,
- Conducts channel-wise, precise GACP-Triangle intersection to obtain the exact ray spans, resolving seam ambiguities for seam-straddling triangles.
- Executes intersection tests only over necessary rays within identified spans.
Apparent area calculations, combined with conservative span estimation for SATs and precise GACP-based evaluation for BATs, enable per-frame O(τ) culling with minimal atomic contention, both on CPU and GPU.
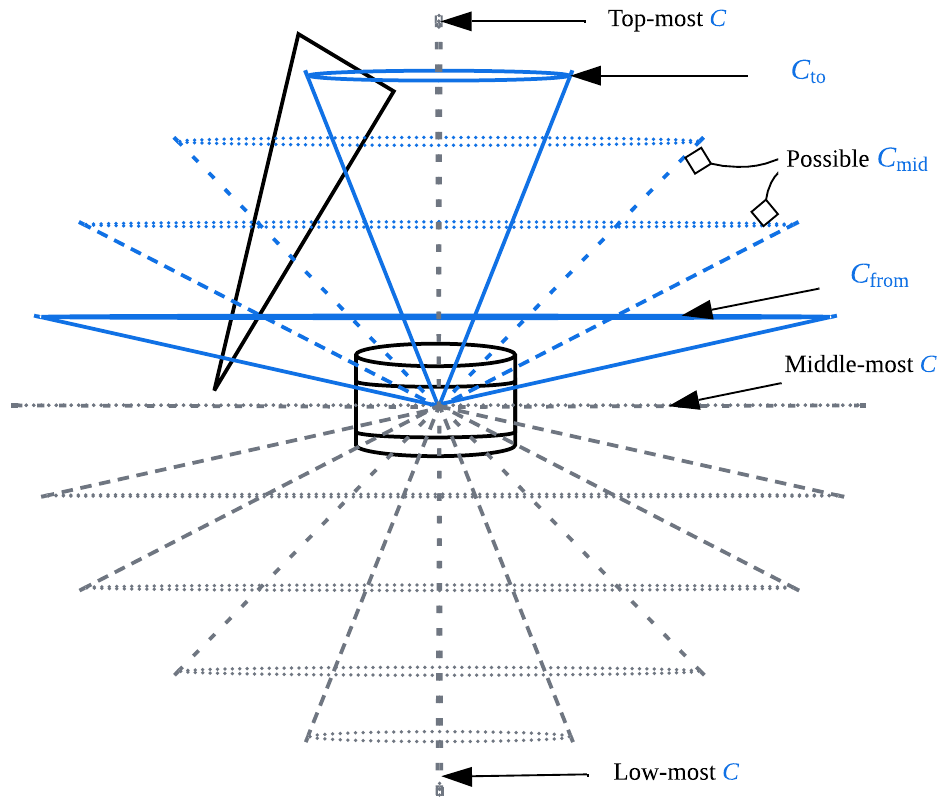
Figure 3: Channel-span (Cspan) and ray-span (Rspan) estimation for per-triangle filtering.
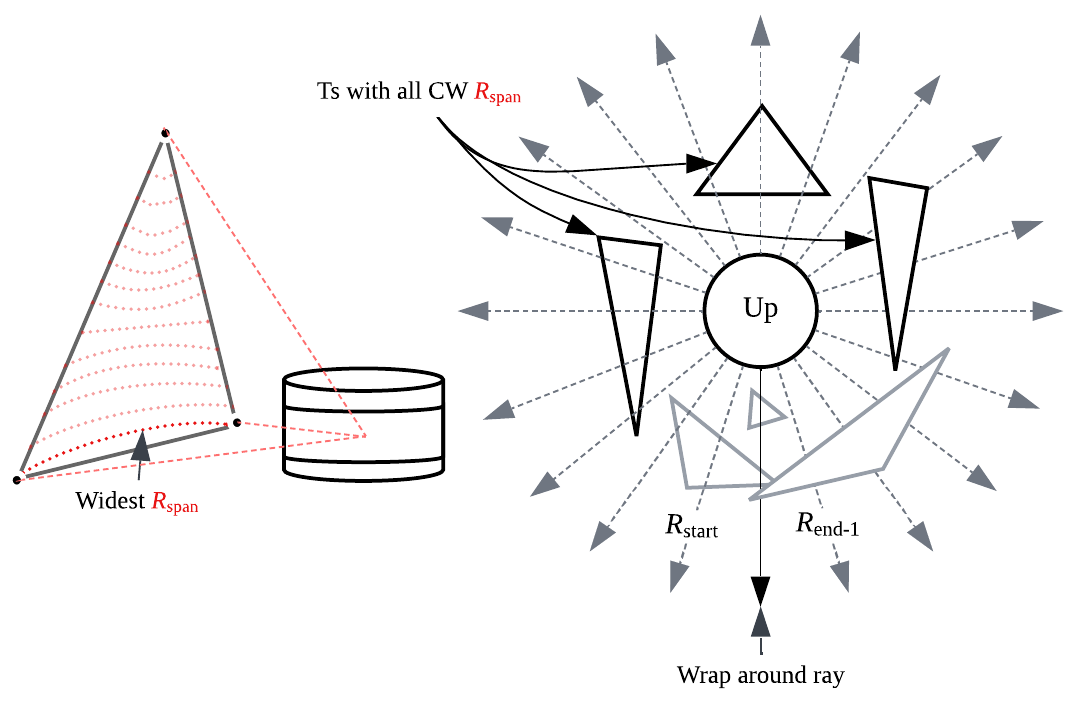
Figure 4: Precise per-triangle Rspan computation during the late pass enables exact coverage, essential for BAT triangles.
Figure 5: CW/CCW arc mid-plane test for seam-straddling triangles, ensuring correct selection of the angular sector for intersection.
Numerical Results and Claims
Performance:
- GRCA outperforms traditional hardware-accelerated and BVH-based ray tracing by substantial margins in arbitrarily dynamic scenes, as measured across up to 8 simultaneous high-density LiDARs (∼4.2×106 rays/frame) on scenes with up to ∼22M triangles.
- Without range culling: Up to 7.97× speedup compared to OptiX (GPU) and 14.55× over Embree (CPU).
- With range culling (10--100 m): Up to [Cfrom,Cto]×[Rfrom,Rto]0 (GPU) and [Cfrom,Cto]×[Rfrom,Rto]1 (CPU).
- Hybrid pipeline (dynamic handled by GRCA, static by BVH): Up to [Cfrom,Cto]×[Rfrom,Rto]2 (GPU) and [Cfrom,Cto]×[Rfrom,Rto]3 (CPU) against standalone baselines.
Triangle Filtering:
- Vast majority of remote or small triangles are culled outright; conservative span prediction ensures correctness, with observed miss rates confined to numerically pathological or sub-resolution cases.
- Accuracy: For most scenes and configurations, the hit-rate floor is [Cfrom,Cto]×[Rfrom,Rto]4 compared to OptiX, with sub-threshold floors in compact, fine-grained scenes attributable to sub-grid triangles or rounding, not fundamental errors.
Resource Use and Scalability:
- GRCA is free of acceleration structure memory and rebuild cost: unlike BVH-based approaches, memory use is lower and is independent of per-frame geometry change.
- Performance is robust to variation in mesh density, dynamic object counts, and dynamic deformation magnitude; only static, large-triangle scenes present worst-case behavior (where BVHs also perform optimally).
Algorithmic Invariances:
- Emitter-centric per-triangle filtering is [Cfrom,Cto]×[Rfrom,Rto]5 per frame, independent of ray count, scene dynamics, or sensor origin count, due to the fundamental emitter-centric model. This sharply contrasts with [Cfrom,Cto]×[Rfrom,Rto]6 brute-force and [Cfrom,Cto]×[Rfrom,Rto]7 BVH rebuild per frame in dynamic settings for ray-centric approaches.
Practical and Theoretical Implications
Simulation at unprecedented scale:
The emitter-centric paradigm, particularly in multi-sensor, high-resolution, and highly dynamic contexts, breaks the primary scaling bottleneck of prior art: per-frame BVH updates. Real-world scenarios, such as robotic fleets or automotive simulation, benefit from the algorithm’s ability to efficiently handle complex, rapidly changing mesh environments with many vertices and multiple simultaneous emitters.
Cross-domain applicability:
GRCA generalizes to any emitter-centric scenario—photon mapping, light transport, spot/area illumination, radar, sonar—even outside LiDAR. The underlying principle is agnostic to the specific physics of emission, provided the emission origin and geometry are known.
Hybridization:
An empirically optimal configuration is to handle dynamic geometry via GRCA and offload static geometry to a BVH. This hybrid approach offers maximal throughput without sacrificing accuracy or interoperability with legacy pipelines.
Limits:
For static scenes with little dynamic geometry, conventional BVH methods remain preferable. Non-monotonic scan patterns, MEMS/flash sensors, or per-ray angular noise require additional adaptation but are partially addressed within the GRCA framework.
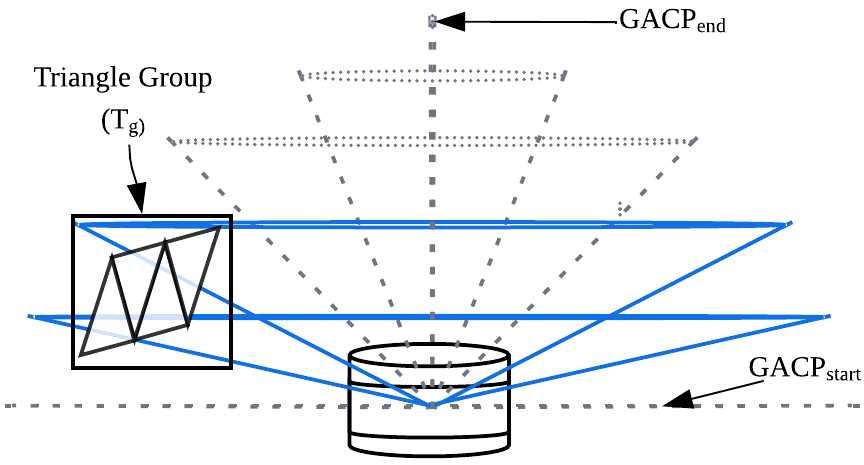
Figure 6: Group-level GACP-T[Cfrom,Cto]×[Rfrom,Rto]8 intersection demonstrates hierarchical culling for further acceleration.
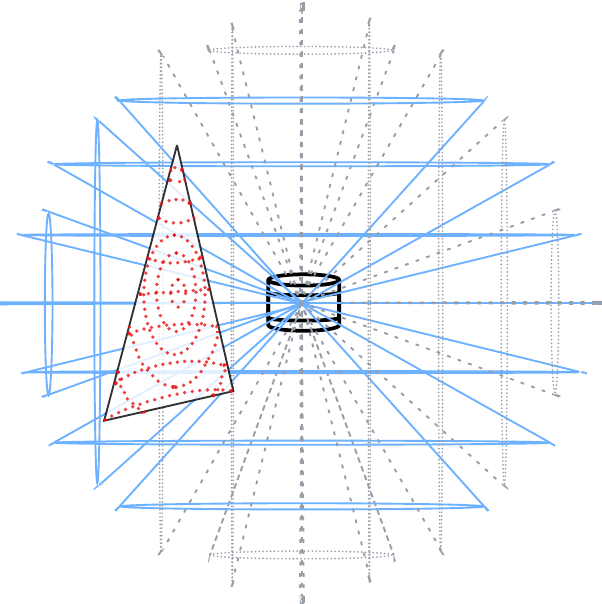
Figure 7: Combined scan patterns from multiple co-located, differently oriented ray origins illustrate practical extensions for coverage diversity.
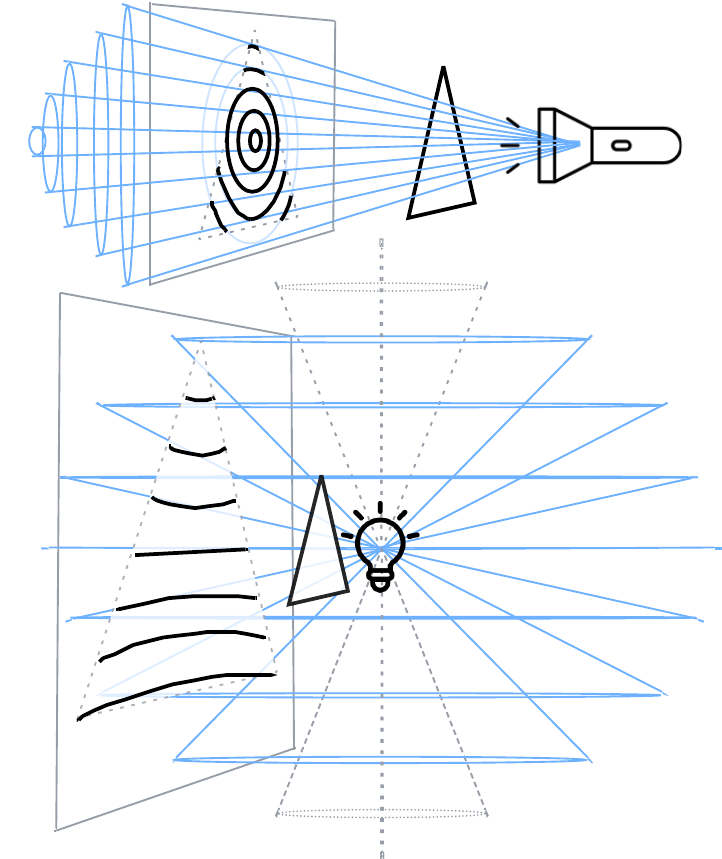
Figure 8: Extension to per-triangle light-reachability prediction for efficient shadow ray generation from point and spot light sources.
Extensions and Future Research Directions
Hierarchical Culling:
Integration of GACP-T intersections with hierarchical culling (GACP-T[Cfrom,Cto]×[Rfrom,Rto]9) promises O(τ)0 pruning, analogously to BVH traversal but without ray- or structure-centric biases.
General-Purpose Ray Casting:
Opportunities exist for emitter-centric ray casting in advanced rendering (e.g., bidirectional path tracing with dynamic occluders), enabling on-the-fly per-triangle reachability prediction and culling for all emitter types.
Advanced Pattern Support and Sensor Models:
While the LiDAR grid model aligns with mechanical LiDAR, generalized or aperiodic sampling (MEMS, OPA) can be managed via per-ray bitmap masking or co-located emitter compositing.
Noise and Realism:
Extensions to include stochastic per-ray angular and range noise are straightforward and discussed in the paper, though per-ray elevation perturbations are not natively supported due to the per-channel GACP model.
Conclusion
The GRCA algorithm demonstrates, both theoretically and empirically, that emitter-centric geometric modeling radically improves LiDAR simulation throughput in arbitrarily dynamic scenes by eliminating the per-frame costs of acceleration structure rebuilds, culling irrelevant geometry via closed-form apparent-area assessment, and unifying ray-bundles via the GACP surface model. These contributions offer substantial implications for real-time, high-fidelity simulation in robotics, autonomous systems, and general-purpose emitter-based rendering or sensing, and they open avenues for further generalization to other emitter-centric domains.
Reference:
"Geometrically Approximated Modeling for Emitter-Centric Ray-Triangle Filtering in Arbitrarily Dynamic LiDAR Simulation" (2605.10457)