- The paper presents a novel multi-robot task assignment method using aggregate programming and self-stabilizing consensus for decentralized coordination.
- It integrates eXchange Calculus with ROS2 and NAV2, achieving effective task distribution and fault tolerance in both simulated and physical deployments.
- Experimental validation in a library setting confirms adaptive reassignment, robustness to network partitions, and energy-aware score computations.
Exploiting Aggregate Programming for Multi-Robot Task Assignment: System, Architecture, and Validation
Introduction and Motivation
This work presents an instantiation of Aggregate Programming (AP) as the coordination logic for a multi-robot service prototype in a university library domain (2604.06876). The motivation centers on meeting the increasing demand for robust and adaptive coordination in multi-robot systems (MRS), where distributed decision-making, resilience to failures, and peer-to-peer communication are essential. The study explores AP’s capacity to deliver decentralized, resilient task allocation by leveraging self-stabilizing operators within the eXchange Calculus (XC) formalism, implementing the distributed logic with FCPP and integrating it tightly with navigation and sensing infrastructure via ROS2 and the NAV2 stack.
Aggregate Programming and the Engineering Stack
Aggregate Programming offers macro-programming abstractions that enable developers to specify collective behaviors without resorting to explicit low-level communication logic. The XC model decouples device-specific management of messaging, state, and communication contexts, enabling asynchronous, round-based computations on each device with proximity-based peer communication.
At the core, XC’s exchange primitive and neighboring value aggregation via context alignment underpin the ability to perform local computations with consistent distributed effect—critical for building resilient consensus and coordination primitives. The AP engineering stack layers these abstractions atop device-specific capabilities, exposing coordination operators such as diameter_election for leader election and self-stabilizing information rounds.
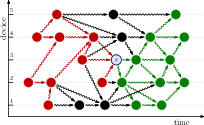
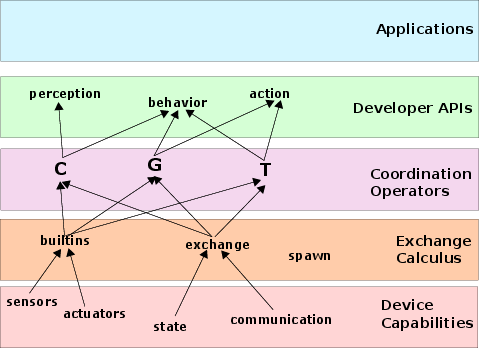
Figure 1: A sample event structure underlying AP's distributed model (left) and the vertical layering of the AP Engineering Stack (right).
System Architecture
The system architecture integrates aggregate computation with established robotics middleware. User queries flow from a web interface into the AP engine, which executes the distributed task assignment algorithm atop FCPP. The AP engine interfaces with the ROS2-based robot controllers via file- and topic-based bridges, ensuring bidirectional integration between high-level task allocation and low-level control/state feedback.
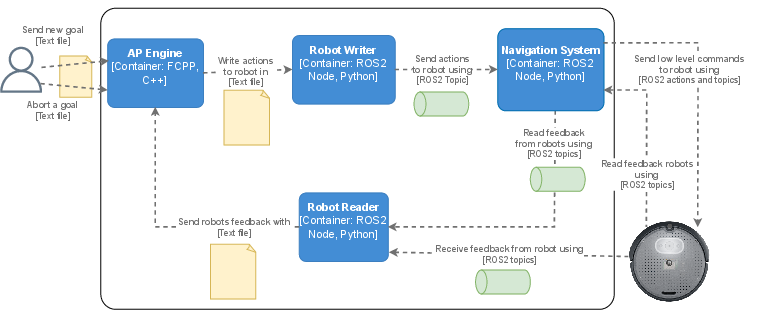
Figure 2: Architecture diagram showing the interaction between the Aggregate Programming engine, ROS2 stack, and support infrastructure.
Deployment Modes
The implementation and evaluation are performed in both simulated (Gazebo Classic) and physical (Create3-based) deployments, exhibiting the solution’s flexibility and transferability between virtual and real environments.
Aggregate Algorithm for Multi-Robot Task Assignment
The central computational problem addressed is the multi-robot task assignment (MRTA) under the constraints single-tasking robots (ST), singleton task allocation (SR), and immediate assignment (IA). The AP algorithm is designed to handle:
- Online concurrent task arrivals: Achieved by spawning aggregate processes per task.
- Proximity-based, decentralized consensus: No centralized broker; all message exchange is P2P.
- Self-stabilizing consensus for leader election: FCPP's
diameter_election ensures convergence even in dynamic scenarios.
- Adaptivity to faults and opportunities: Robot/communication failures and changing efficiency conditions are handled via self-stabilizing logic and preemptive reassignment criteria.
Key to the approach is the formulation of an explicit score computation that balances spatial and energy considerations (e.g., distance to goal, battery state) and utilizes self-stabilizing operators to resolve leader selection and reassignment in dynamic network topologies.
Conflicts arising from temporary network partitions are automatically reconciled upon re-connection, leveraging AP’s composition semantics to merge duplicated aggregate processes for the same task.
Experimental Validation
Simulation
Validation is conducted in a high-fidelity Gazebo simulation, creating a digital twin of the laboratory setup. Multiple robots are deployed with realistic sensing and actuation. The simulated scenario demonstrates robust task assignment, task reassignment on induced failures (e.g., battery drain), and fault tolerance to network partitions. The system dynamically reassigns tasks and terminates duplicated assignments post reconnection, evidencing the practical efficacy of AP in decentralized environments.

Figure 3: Library world as modeled in the Gazebo simulator, replicating the real deployment geometry for validation.
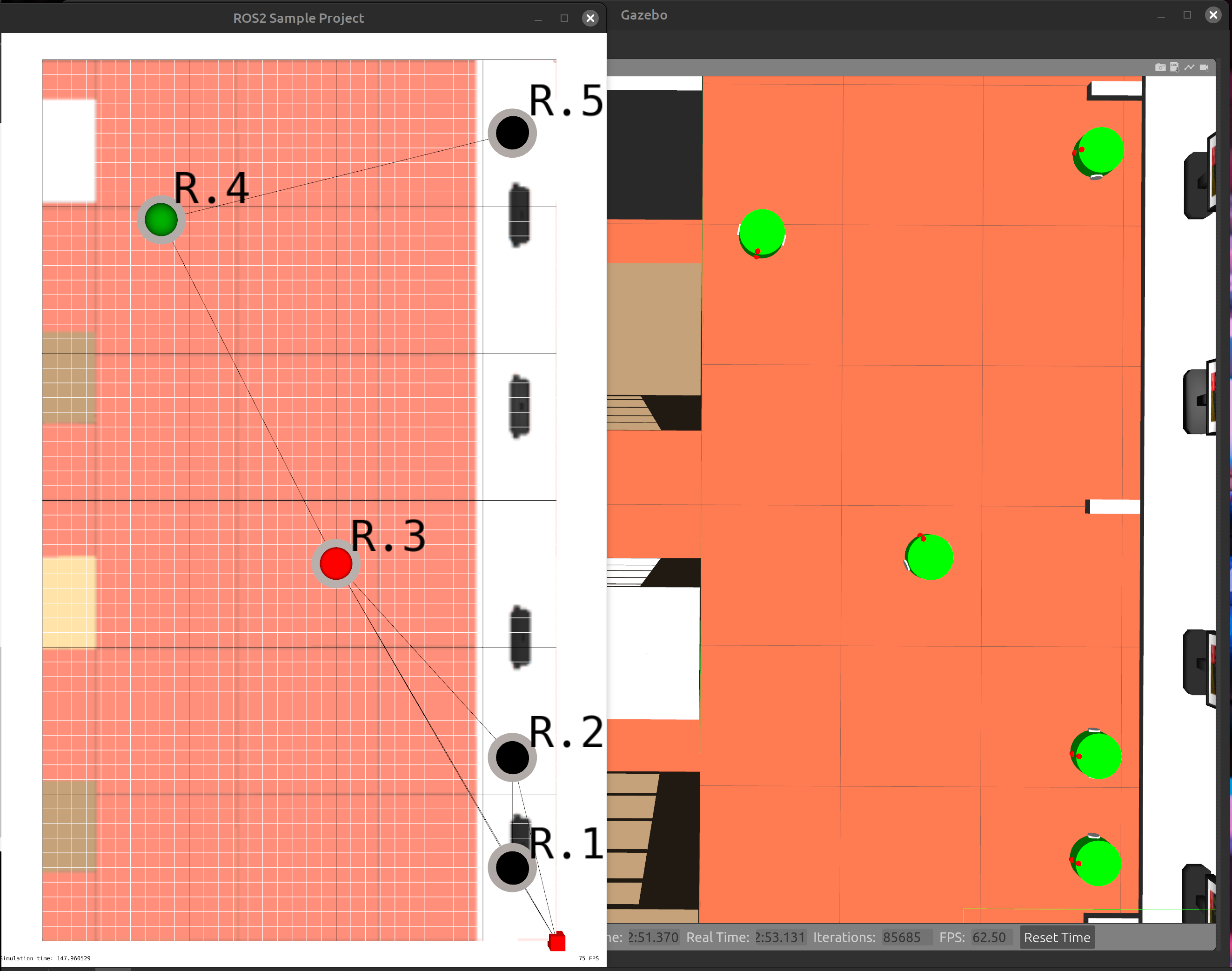
Figure 4: Visualization of a network partition (left) and subsequent recovery and conflict resolution (right), confirming self-stabilization and resilience.
Physical Prototype
Experiments on physical robots confirm the results observed in simulation. Low-level communication is adapted to real networking constraints (CycloneDDS, WiFi, and custom UDP drivers), and the AP engine maintains robust coordination in the presence of network variability and heterogeneous robot capabilities.
Failure scenarios such as navigation faults or energy depletion are propagated and handled by the AP layer, which successfully initiates reassignment and process termination where warranted.

Figure 5: Real-world deployment of multiple physical robots, executing the aggregate programming coordination in a semi-structured indoor environment.
Implications and Future Directions
The application of AP in a real-world MRS use case substantiates its practical utility for scalable, robust, and adaptive distributed coordination. The macro-programming approach directly addresses the key challenges of task allocation, recovery from faults, and decentralized operation, simplifying the realization of complex behaviors without sacrificing resilience.
Theoretically, this implementation validates the effectiveness of XC as a foundation for aggregate computation in mobile robotic collectives, especially when interfaced with industry-standard robotic infrastructures such as ROS2 and NAV2.
Future research is motivated by the extension of AP approaches to more challenging domains: continuous coverage, patrolling, and integration with advanced perception and planning subsystems (e.g., computer vision, SLAM). Seamless interoperability with mesh networking and more general peer-to-peer overlays will further strengthen the methodology’s applicability to more dynamic and unstructured environments.
Conclusion
This work demonstrates that Aggregate Programming, as realized through XC and FCPP, provides effective abstractions and mechanisms for the decentralized coordination of multi-robot systems. The architecture, algorithmic logic, and experimental evaluations—across both simulated and physical domains—highlight the method’s capacity for resilient, adaptive MRTA. The programmability, self-stabilizing consensus, and integration strengths of AP position it as a compelling approach for future developments in distributed autonomous robotic collectives.