- The paper introduces MAPF_Z, a framework that balances realism and tractability by using non-unit integer edge costs.
- It proposes CBS-NIC, an enhanced conflict-based search that uses temporal interval conflict detection and disjoint splitting for improved scalability.
- The integration of Bayesian optimization (BOGD) enables smart graph discretization, yielding high success rates and drastic runtime improvements in benchmark tests.
Multi-Agent Pathfinding with Non-Unit Integer Edge Costs: Enhanced CBS and Graph Discretization
Introduction
The paper addresses a salient deficiency in classical Multi-Agent Pathfinding (MAPF) frameworks: the assumption of unit edge costs and synchronized, single-timestep agent actions. Such restrictions compromise the applicability of MAPF algorithms to real-world scenarios, where physical environments naturally contain heterogeneous edge lengths and agents may traverse edges over variable durations. Prior attempts at realism, notably MAPFR, increase modeling fidelity by adopting non-unit, real-valued costs and continuous time, but these incur significant computational and scalability penalties due to unbounded state spaces. This work introduces MAPFZ, a novel MAPF variant that operates on graphs with non-unit integer edge costs, thereby achieving an improved balance between realism and tractable search space cardinality.
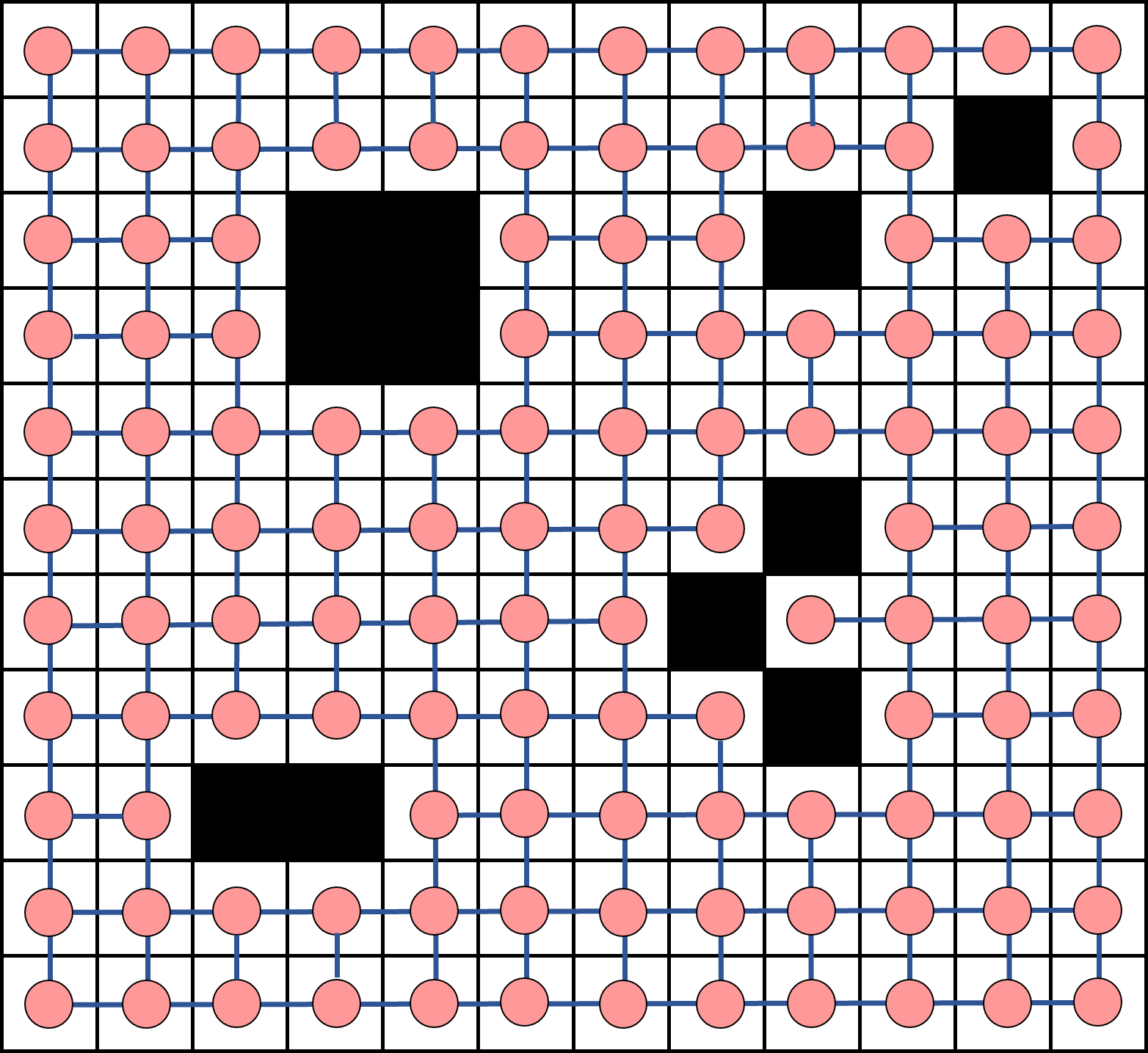
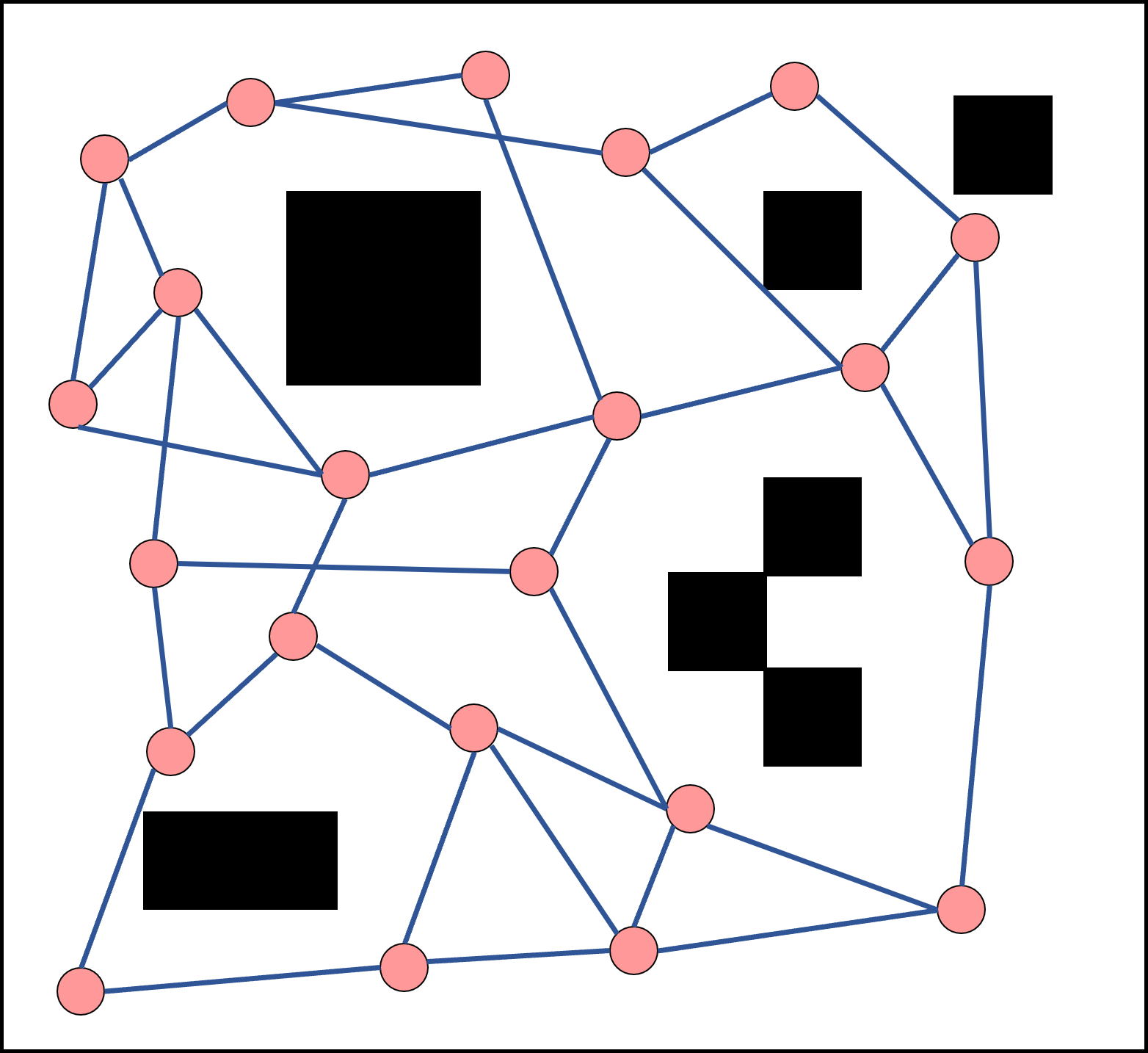
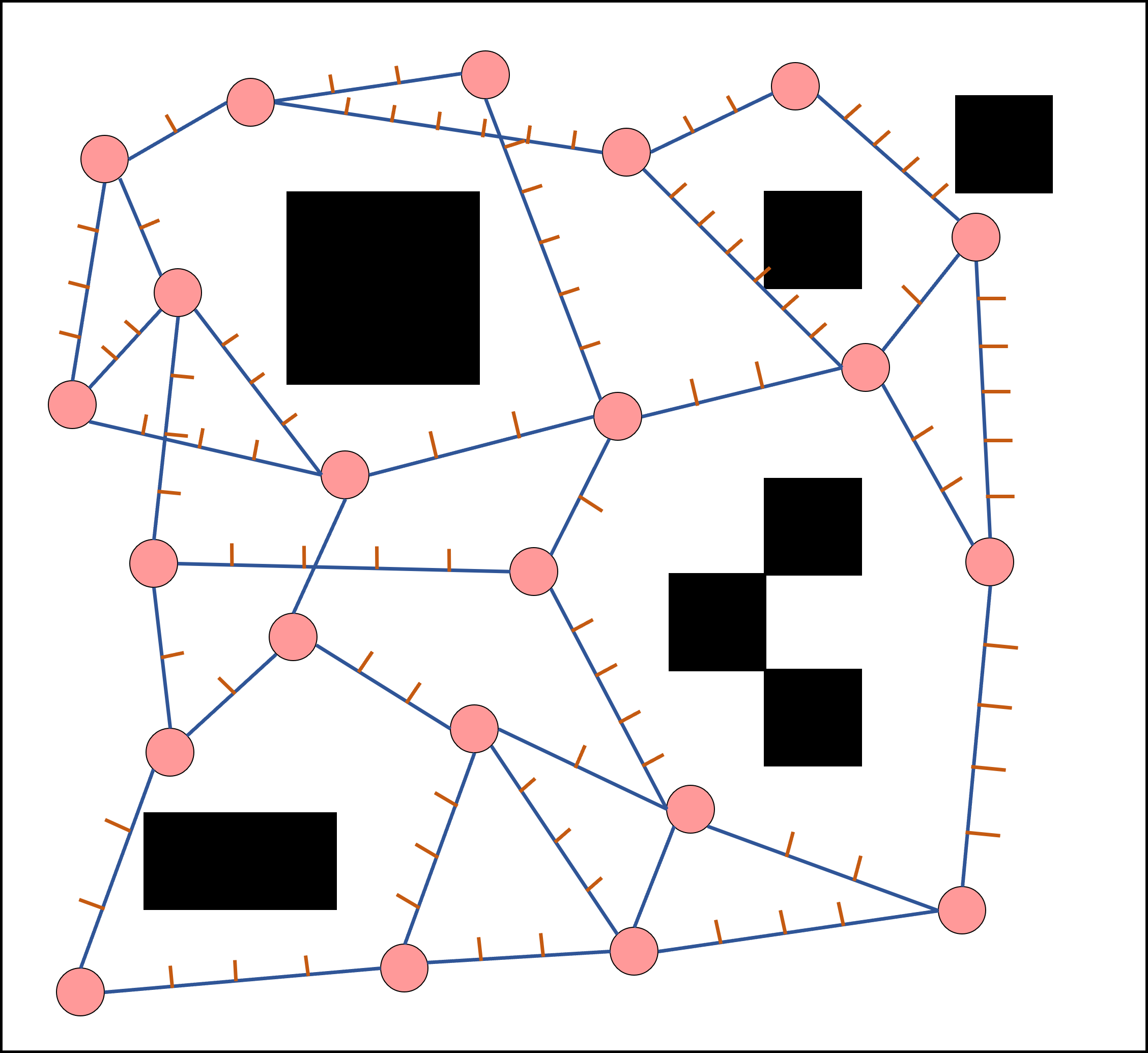
Figure 1: (a) Classic (unit cost), (b) general non-unit, and (c) non-unit integer cost graphs underlying different MAPF settings.
The proposed solution couples two algorithmic advances: an enhanced Conflict-Based Search (CBS-NIC) tailored for MAPFZ and the Bayesian Optimization for Graph Design (BOGD), which automates the discretization of non-unit edge costs to integer values. These innovations address both the search and representation bottlenecks inherent in generalized MAPF.
MAPFZ is formally defined on a positively weighted graph G=(V,E,W) with W:E→Z>0, such that edge weights directly encode integer traversal durations. Each agent ai∈A follows a plan πi described as a timed sequence of vertices, respecting causality constraints tij≥tij−1+W(vij−1,vij). The optimization objective remains the minimization of makespan, Z0, subject to conflict avoidance throughout discrete time.
Introducing non-unit integer edge costs yields several key transitions in the structure of the underlying search:
- The state space remains finite and manageable, unlike the continuous-time MAPFZ1 settings.
- Temporal interactions become non-trivial, as agents may simultaneously occupy vertices or traverse edges with overlapping but non-identical intervals.
This framework naturally advances beyond the simplicity of classic MAPF, supporting asynchronous agents and realistic graphs without incurring the prohibitive complexity of geometrically continuous spaces.
Enhanced CBS for MAPFZ2: CBS-NIC Architecture
CBS-NIC extends the classical Conflict-Based Search paradigm to efficiently operate on non-unit integer edge graphs. Core innovations include:
- Time-Interval-Based Conflict Detection and Constraint Generation: Rather than point-wise collision checking, CBS-NIC formulates conflicts and constraints over temporal intervals, capturing the occupancy semantics induced by variable-duration actions.
- Incorporation of Disjoint Splitting (DS): By using positive and negative constraints to prune infeasible search branches, CBS-NIC-DS reduces redundant constraint tree nodes, yielding improved scalability.
- Integration of Safe Interval Path Planning (SIPP): The low-level solver employs a version of SIPP customized for integer-weighted, discretized time, ensuring that agent-specific plans comply with conflict-generated constraints efficiently.
(Figure 2)
Figure 2: CBS-NIC detects and resolves conflicts via time intervals and leverages disjoint splitting to reduce the Constraint Tree expansion.
Theoretical analysis confirms that CBS-NIC maintains completeness and optimality within the bounded search space dictated by integer costs.
Bayesian Optimization for Edge Cost Discretization: BOGD
Realistic environments often provide non-unit, real-valued edge costs. The discretization of such graphs to integer-weighted representations necessitates a sophisticated trade-off between computational efficiency (search speed) and fidelity (solution quality due to discretization error).
BOGD formalizes this as a multi-objective optimization problem over the discretization parameter Z3, simultaneously minimizing:
- The runtime of the downstream MAPF solver, a black-box function,
- The cumulative discretization error along agent paths.
The optimization employs Multi-Objective Bayesian Optimization (MOBO), with a Gaussian Process surrogate for runtime and closed-form calculation for error, guiding the search using the Lower Confidence Bound (LCB) acquisition function. Theoretical results establish a sublinear regret bound for cumulative performance loss, ensuring that the procedure asymptotically approaches Pareto-optimal discretizations.
(Figure 3)
Figure 3: The BOGD framework exploits MOBO for intelligent search over the discretization parameter, instantiating each candidate in MAPFZ4 and querying CBS-NIC.
Empirical Evaluation: Solution Quality, Runtime, and Scalability
Experiments on benchmarks from the Moving AI repository demonstrate strong empirical advantages. CBS-NIC-B (CBS-NIC augmented with BOGD) is evaluated against CCBS, MA-CBS, EPEA, and baseline discretizations on both grid-based and roadmap-based environments.
- Success Rates: CBS-NIC-B consistently achieves high (often 100%) success rates, robust to increasing agent counts (up to >100 agents). Competing methods, notably CCBS, degrade quickly due to unbounded state spaces and high computational costs.
- Solution Quality: While discretization (BOGD) may induce small increases in makespan, CBS-NIC-B generally achieves adequate solution optimality commensurate with significant gains in success rates, especially in congested or complex graphs.
- Runtime: CBS-NIC-B drastically outperforms alternatives, with orders-of-magnitude reductions in average runtime (typically Z5 second), showcasing the impact of intelligent discretization and conflict handling for large-scale instances.
(Figure 4)
Figure 4: Success rate across grid-based maps, where CBS-NIC-B dominates as the number of agents increases.
(Figure 5)
Figure 5: Makespan distribution highlights that CBS-NIC variants offer an effective balance between solution cost and computational feasibility.
(Figure 6)
Figure 6: Runtime comparison shows that CBS-NIC-B rapidly outpaces both continuous and unit-cost competitors even as agent counts rise.
Ablation studies reinforce the value of BOGD: when compared to direct integer rounding, the MOBO-guided discretization reveals dramatic improvements in both robustness and efficiency, particularly in densely populated problem instances.
Implications and Future Research Directions
The results establish the practical dominance of the MAPFZ6 formalism and its associated solvers for multi-agent navigation in graphs with realistic edge cost structures. The separation of temporal modeling (integer vs. continuous) from physical realism (variable costs) enables tractable planning at scale. BOGD demonstrates a scalable and theoretically justified mechanism for automated representation tuning.
These methods open multiple avenues for future work:
- Extension to spatio-temporal coordination under real-time execution constraints, essential for high-density robotics and logistics domains.
- Generalization to decentralized or distributed MAPF variants, leveraging edge discretization for communication-efficient planning.
- Investigation of further integration between graph design (topology learning) and planning during both training and deployment.
Conclusion
The integration of CBS-NIC and BOGD within the MAPFZ7 problem class advances the state-of-the-art in scalable, realistic multi-agent pathfinding. Empirical results and theoretical analysis jointly demonstrate that the deliberate handling of non-unit integer costs, together with principled discretization, can overcome the limitations of both classical MAPF and MAPFZ8 formulations. The framework provides a robust foundation for practical deployment in diverse multi-agent systems.
(2604.05416)