- The paper introduces a categorical coalgebraic framework that unifies Lyapunov, asymptotic, exponential, and Zeno stability analyses for hybrid systems.
- It models hybrid systems as coalgebras and employs simulation morphisms to transfer stability properties via Lyapunov morphisms.
- Practical implications include computable convergence rates and new summability bounds for Zeno phenomena in systems like bouncing balls and bipedal robots.
Hybrid Systems as Coalgebras: Lyapunov Morphisms for Zeno Stability
Overview and Motivation
This paper introduces a coalgebraic categorical framework for the analysis and stability verification of hybrid dynamical systems, notably addressing Zeno phenomena. The core contribution is the unification of various Lyapunov-based stability results—encompassing Lyapunov, asymptotic, exponential, and Zeno stability—under the umbrella of coalgebra morphisms into specialized "measurement objects." The approach builds on categorical Lyapunov theory and advances it for the hybrid system setting, enabling the recovery and extension of classical and recent results, as well as the derivation of new summability bounds for Zeno equilibria.
Hybrid systems, which involve continuous-time flows interspersed with discrete jumps, arise in domains such as robotics, walking machines, and mechanical systems with impacts. Traditional Lyapunov analysis treats these phenomena case-wise. By leveraging coalgebras and simulation morphisms in the category Chart, a general, compositional treatment of these systems is attained, extending the Lyapunov machinery to higher generality and facilitating transference of stability properties between models.
Modeling Hybrid Systems as Coalgebras
The categorical foundation models systems as coalgebras for an endofunctor H acting on the category Chart, whose objects encapsulate both continuous (manifolds) and discrete (sets) structure. Each hybrid system is described as a tuple (Γ,D,G,R,F) mapped to a H-coalgebra, ensuring all system aspects—continuous evolution, mode switches, guards, and resets—are encoded within coalgebra morphisms.
The construction admits greater flexibility compared to traditional descriptions: jumps need not be deterministic, and resets are not restricted to submanifolds. Notably, switching systems are naturally subsumed as a subclass via this encoding. Hybrid system executions correspond to morphisms from a "unit clock coalgebra" into the system's coalgebra, ensuring the framework captures both solution trajectories and their combinatorial/discrete structure.
Categorical Lyapunov Theory for Hybrid Systems
A major technical achievement is the instantiation of the categorical Lyapunov theorem (CLT) to hybrid systems. In this setting, a Lyapunov function V becomes a coalgebra morphism from the system into a "measurement object" σ, itself an H-coalgebra equipped with a partial order. Distinct choices of σ correspond to different notions of stability:
- Lyapunov and asymptotic stability: Standard continuous/discrete cases.
- Exponential and rapid exponential stability: Achieved by appropriate definitions of the measurement coalgebra dynamics.
- Zeno stability: Realized by a measurement object with explicit coupling between continuous and discrete variables, encoding the contraction at jumps—typical for Zeno phenomena.
The Lyapunov condition is formulated as a lax-commutative diagram. The core assertion is: stability verification reduces to demonstrating the existence of a positive definite Lyapunov morphism satisfying flow and jump inequalities with respect to the measurement object. This unification enables direct comparison, recovery, and generalization of classical results.
Application to Periodic Orbits and Bipedal Locomotion
The framework is first demonstrated on the stability of hybrid periodic orbits. By selecting appropriate measurement objects, the classical Lyapunov, asymptotic, and rapid exponential stability criteria are reformulated and proven categorically. These results extend to systems like reduced bipedal walking models, as illustrated in trajectories converging to stable hybrid periodic orbits, with convergence rates matching theoretical predictions.
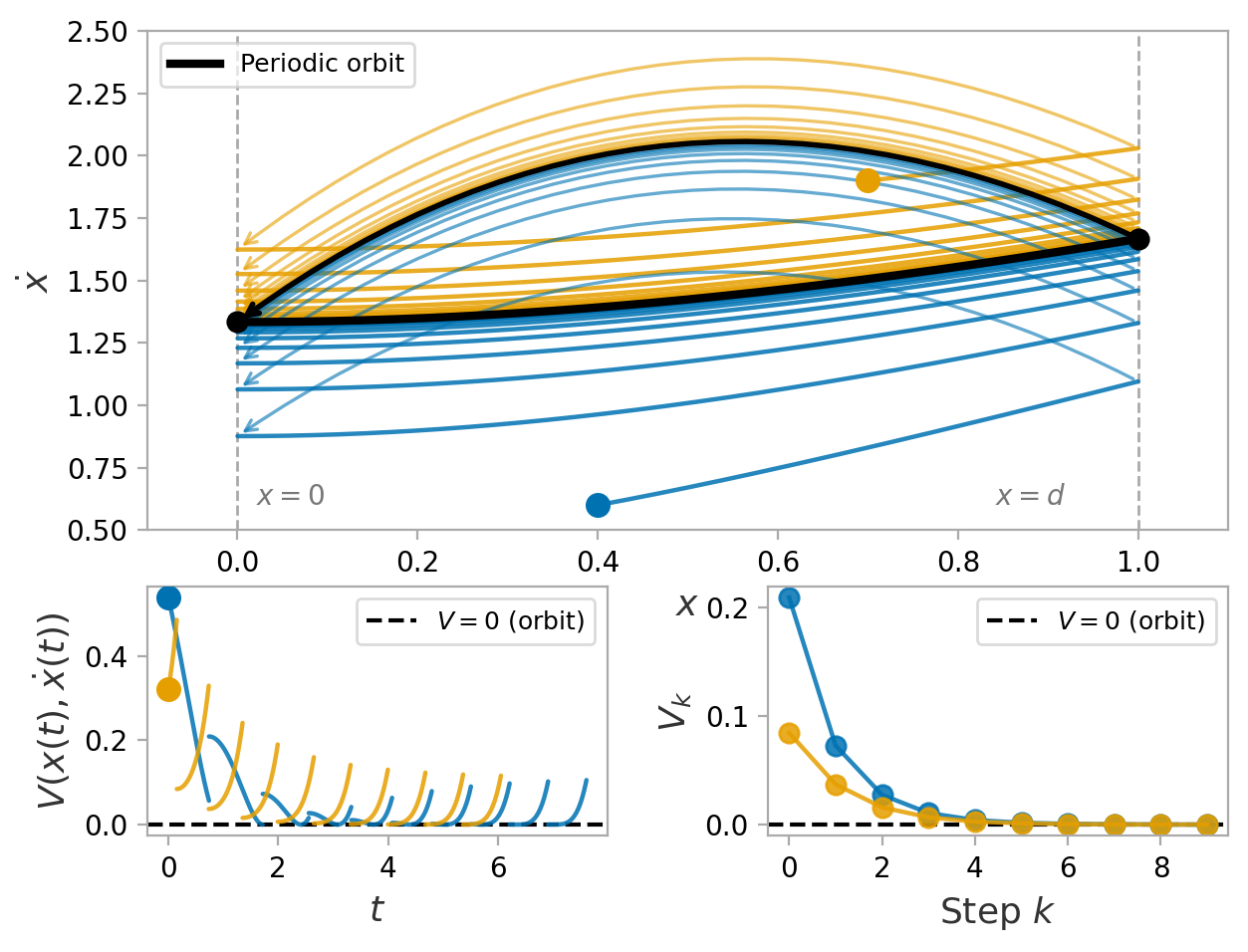
Figure 1: Convergence to a hybrid periodic orbit in a reduced bipedal walking model. Left: phase portrait with periodic orbit (black) and two converging trajectories. Middle: Lyapunov function V(t)=(x˙−x˙∗)2 in continuous time. Right: H0 at each step, converging at rate H1.
Zeno Stability and New Summability Bounds
A pivotal advance is the introduction of a Zeno measurement object—an H2-coalgebra specifically constructed to handle Zeno executions, where infinite jumps accumulate in finite time. The corresponding Lyapunov morphism yields necessary and sufficient conditions for Zeno stability, and enables derivation of explicit summability bounds for the total time elapsed before Zeno accumulation.
These categorical conditions are shown to reduce to classical ones in the case of the bouncing ball—a system with well-known Zeno behavior. The origin is certified as Zeno stable, with the Lyapunov morphism providing a computable upper bound on the total flow time in terms of the initial state.
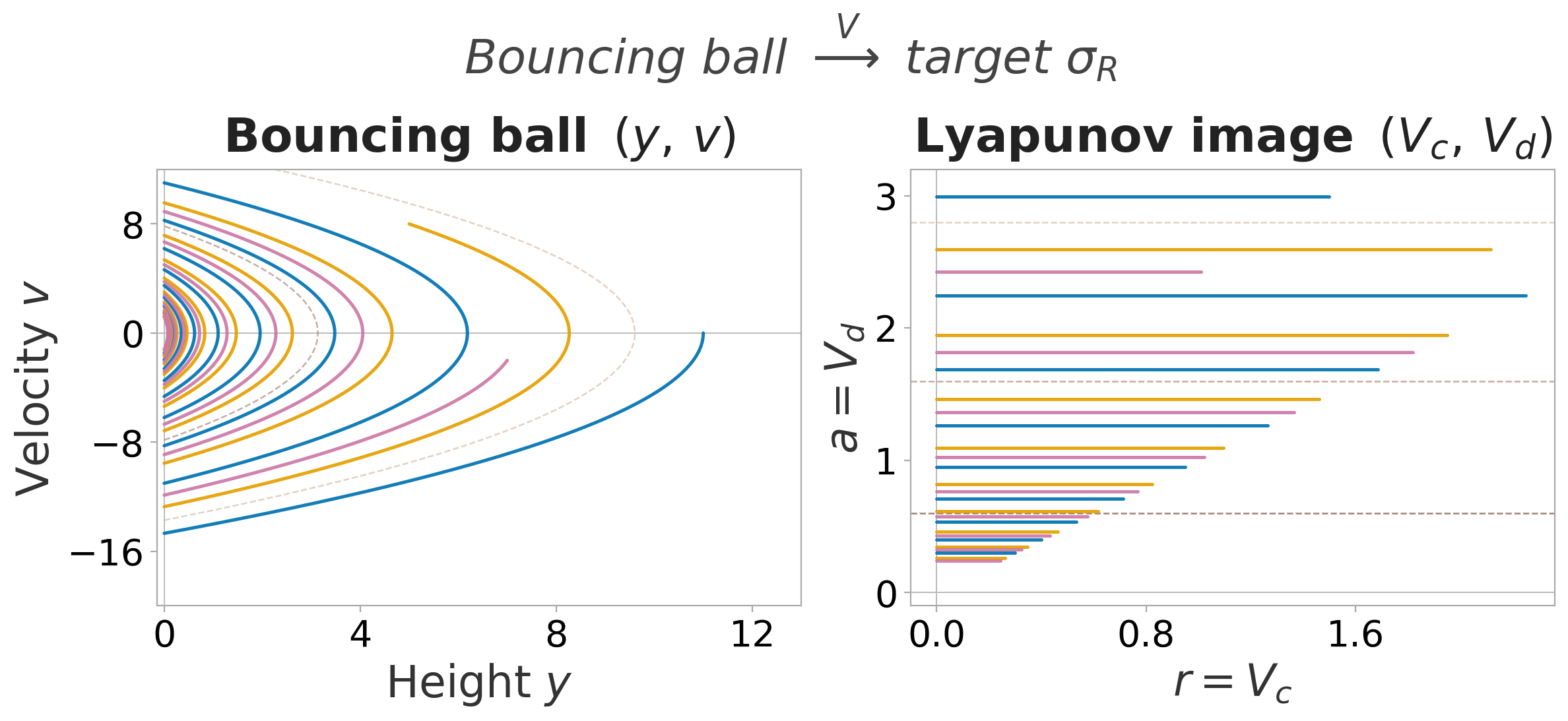
Figure 2: Phase portrait of the bouncing ball (left) and its image under the Lyapunov map H3 in the target system H4 (right).
The same principles are extended to mechanical systems (e.g., Lagrangian systems with impacts), exploiting simulation morphisms between coalgebras to transfer Zeno stability. By mapping a general Lagrangian hybrid system to a canonical bouncing ball system via a smooth map H5, the paper demonstrates that one can certify Zeno stability for the original system via Lyapunov analysis on a simpler target.
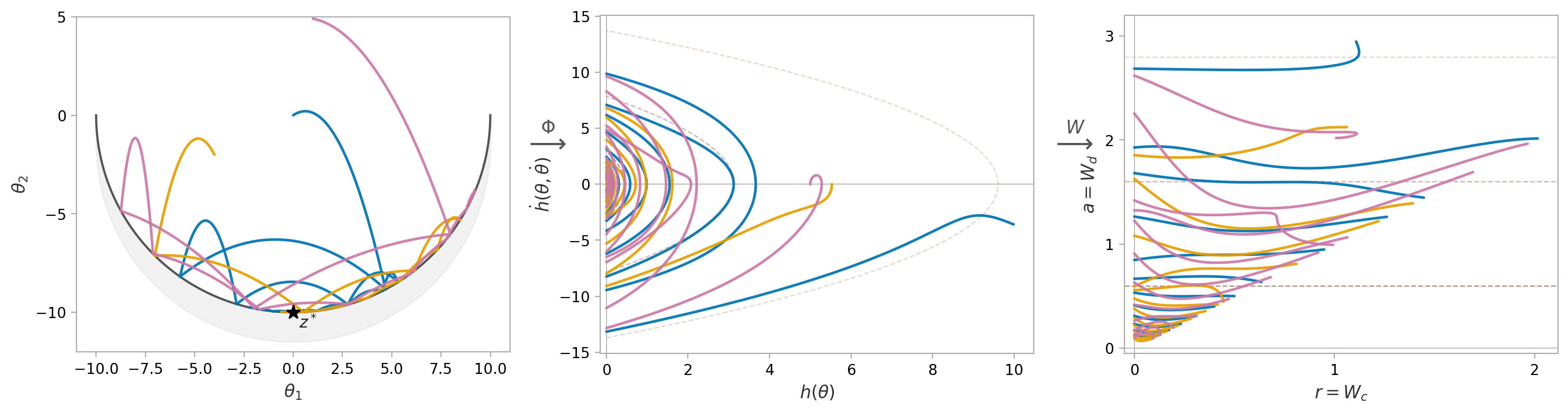
Figure 3: Transference from the bowl system to the bouncing ball via H6, then to the target H7 via H8. Left: trajectories in configuration space converging to H9. Middle: the same trajectories in bouncing ball coordinates Chart0. Right: Lyapunov image Chart1.
Simulation Morphisms and Stability Transference
A salient feature of the approach is the formalization of simulation morphisms between hybrid coalgebras. These morphisms preserve stability, allowing for rigorous transference of Lyapunov arguments from simpler “template” systems (e.g., the bouncing ball, or bowl) to complex systems (e.g., multi-link robots). Importantly, the stability region under this transference is precisely characterized in terms of the pullback of the equilibrium set through the simulation map.
The method is applied to Lagrangian hybrid systems, where the set of Zeno equilibria is typically a submanifold rather than a point. The technique certifies stability to this set, addressing the set stabilization problem common in high-dimensional mechanical systems.
Theoretical and Practical Implications
This categorical coalgebraic framework elevates hybrid systems analysis to a higher level of abstraction, achieving:
- Unified stability analysis: A single categorical theorem recovers and generalizes major Lyapunov-based results for continuous, discrete, and hybrid systems—including Zeno phenomena.
- Modularity and compositionality: Stability properties can be transferred via coalgebra morphisms, enabling reuse of Lyapunov functions and analyses.
- Explicit performance bounds: The formalism yields computable, sharp bounds on convergence rates, Zeno accumulation times, and overshoot, subject to the tightness of the chosen Lyapunov morphism.
- Extension to set stabilization: The framework naturally handles manifold-valued Zeno equilibria and set stabilization, extending beyond pointwise results.
These developments foster deeper theoretical insight and practical tools for the synthesis and certification of controllers in robotics, impact mechanics, and systems presenting hybrid dynamics with Zeno behavior.
Conclusion
The coalgebraic approach to hybrid systems outlined in this paper provides a mathematically rigorous, broadly applicable framework for the categorical treatment of Lyapunov stability, including Zeno phenomena. By casting stability analysis as morphism existence in an enriched categorical setting, the methodology not only subsumes classical results but also supports modular transfer of properties and systematic treatment of complex behaviors. This foundation has significant implications for hybrid system modeling, formal verification, and the control design of mechanical and robotic systems exhibiting hybrid and Zeno dynamics.