- The paper introduces explicit safety filters that replace QP solves with closed-form, piecewise affine control laws to ensure robust safety in linear systems.
- It leverages geometric properties such as parallelism and block independence to derive tractable offline feasibility conditions for affine constraints.
- Numerical studies on double integrator and aircraft roll–yaw dynamics validate the method's real-time performance and strict safety guarantees.
Structure, Feasibility, and Explicit Safety Filters for Linear Systems: Technical Overview
The paper "Structure, Feasibility, and Explicit Safety Filters for Linear Systems" (2604.04235) addresses the structural and computational challenges inherent in deploying quadratic program-based (QP) control barrier function (CBF) safety filters on linear time-invariant (LTI) systems. Unlike generic approaches, this work emphasizes the fundamental geometric properties induced by constant constraint normals for CBFs applied to linear systems with affine safety and input constraints. The central problems tackled are:
- Providing exact, tractable characterizations of state-dependent QP feasibility domains under multiple affine-in-input constraints.
- Exploiting structural properties—specifically, parallelism and block independence among constraint normals—to develop offline feasibility conditions and, in specific cases, closed-form explicit safety filters.
This approach enables both certification of persistent feasibility and efficient online realization by replacing QP solves with simple saturations or affine laws whenever the structure admits it.
Feasibility Characterization: General and Structured Cases
General Feasibility—Farkas' Lemma
In the fully general setting, feasibility of the stacked affine-in-input constraints and input limits is characterized via Farkas' Lemma: The QP is feasible at a given state if and only if, for every nonnegative multiplier vector annihilating the stacked input constraint matrix, the corresponding affine offset is nonnegative. The feasible state set is always a polyhedron due to the affine dependence on state, but practical offline verification is challenging absent further structure.
Structural Simplifications: Parallelism and Block Independence
Significant simplifications emerge for two fundamental classes:
- Parallel Constraint Families: If a subset of constraints share a normal direction (up to scaling), the feasibility test reduces to verifying non-emptiness of a scalar interval (constructed from state-dependent affine functions) intersected with the attainable input domain projected onto the normal direction. For box-constrained or unbounded inputs, this can be written as explicit inequalities in the state.
- Linearly Independent Blocks: When constraint normals form blockwise linearly independent families, each block can be checked independently for feasibility in the absence of input bounds. This blockwise decomposition enables modular design and verification.
- Dependent Direction Families: For cases where constraint directions are dependent, the paper derives interval-consistency conditions guaranteeing that dependent directions do not yield contradictory requirements within the independent interval attainability polytope.
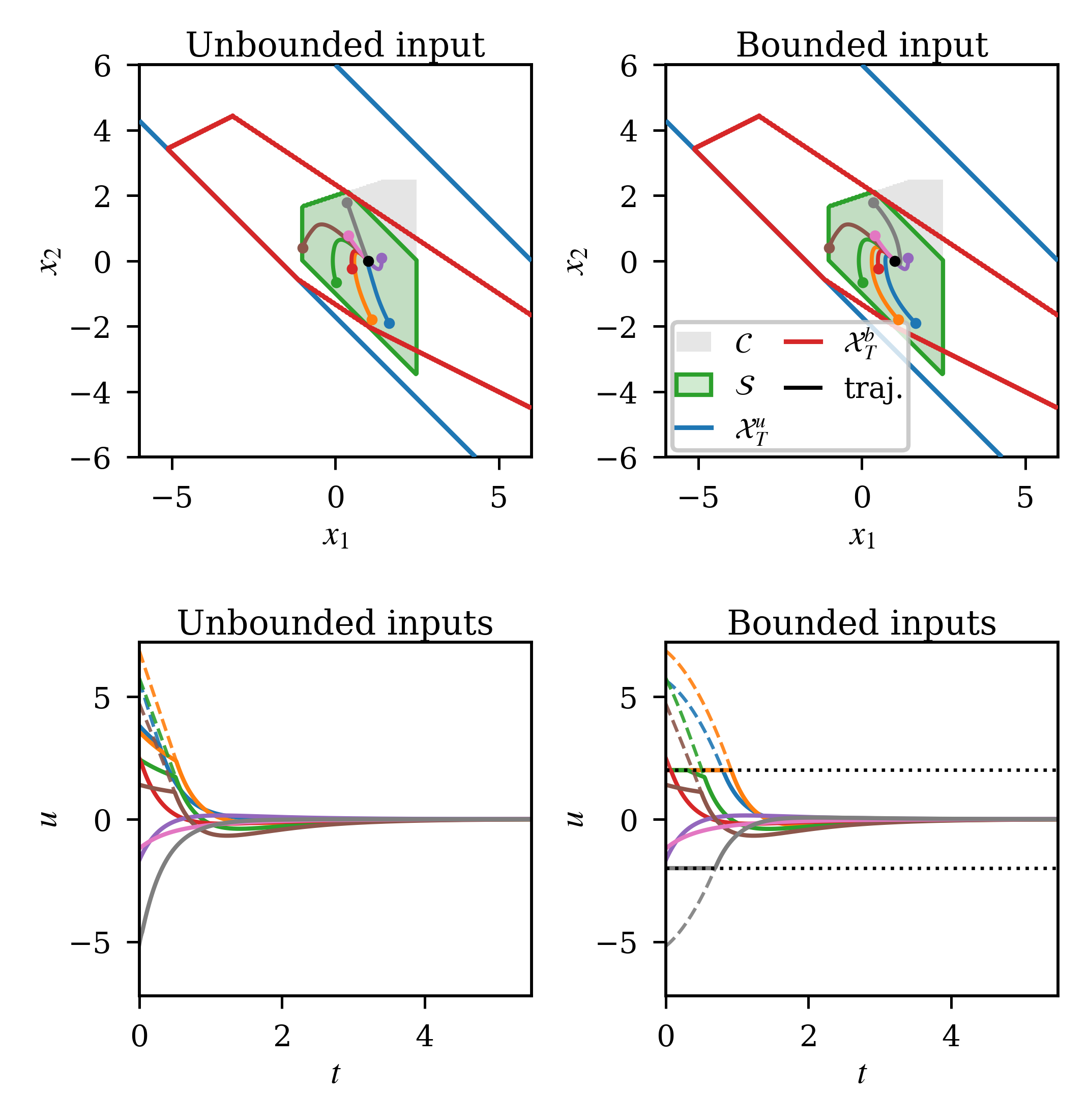
Figure 1: Double-integrator example showing the safe set C, the CBF-admissible set S, and explicit feasibility domains for both unbounded (XTu) and bounded-input (XTb) cases.
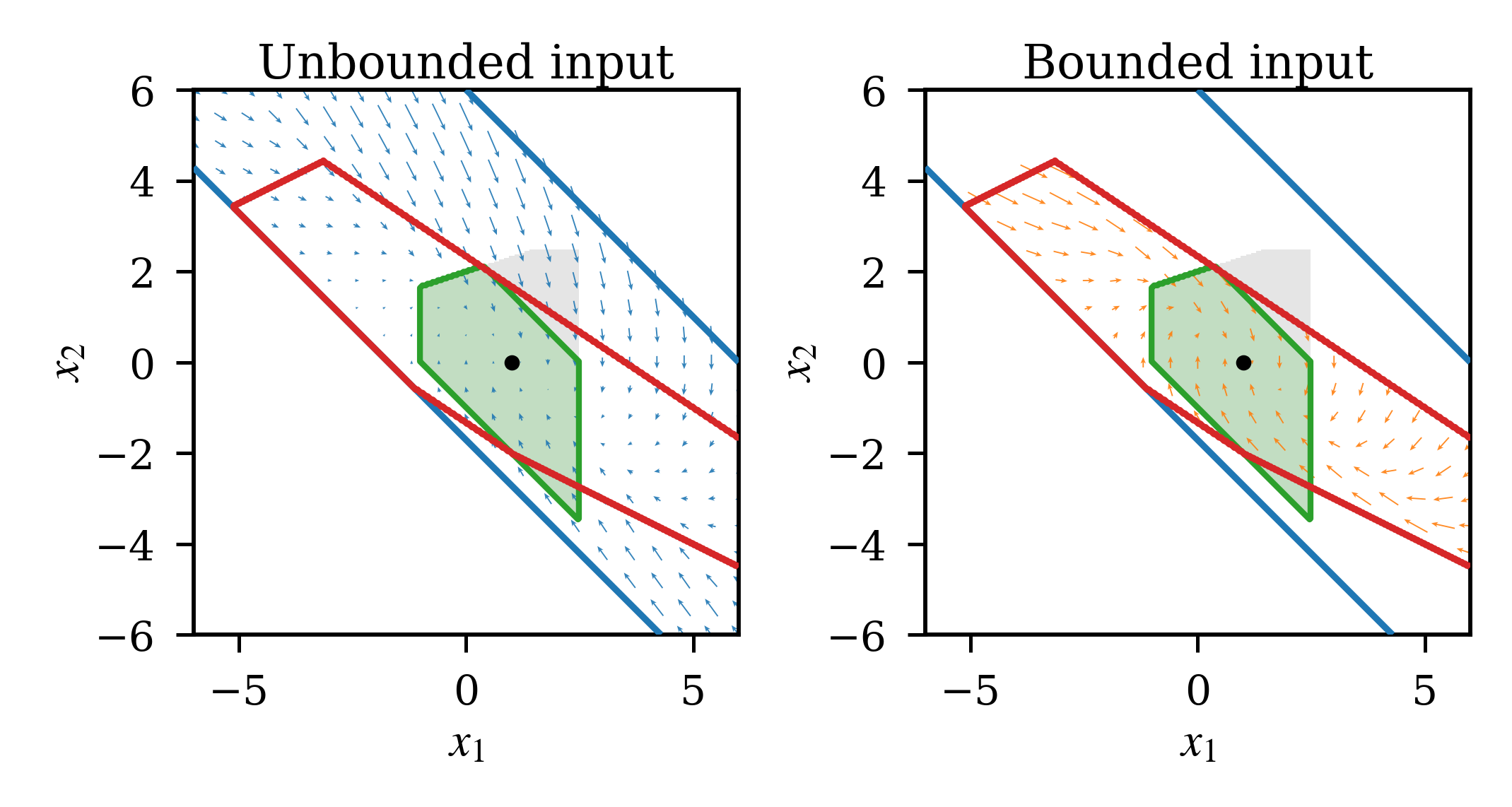
Figure 2: Closed-loop vector fields over the feasibility domains for the double integrator, left: unbounded-input case, right: bounded-input case.
Numerical Realizations and Polyhedral Domains
For parallel constraints and polyhedral input bounds (especially box constraints), the feasible region is determined by simple min/max operations among finitely many affine functions of the state. These properties admit efficient offline set computations and scalability with the number of constraints.
Single Direction (Parallel Constraints)
For constraints acting along a single direction, the QP admits an analytic, piecewise-affine solution given by:
u∗(x)=ud(x)+v⊤G−1vϵ∗(x)−ϵd(x)G−1v
where v is the shared normal, ϵd(x)=v⊤ud(x), and ϵ∗(x) is obtained by saturating ϵd(x) onto the state-dependent admissible interval determined by the parallel constraints and input bounds.
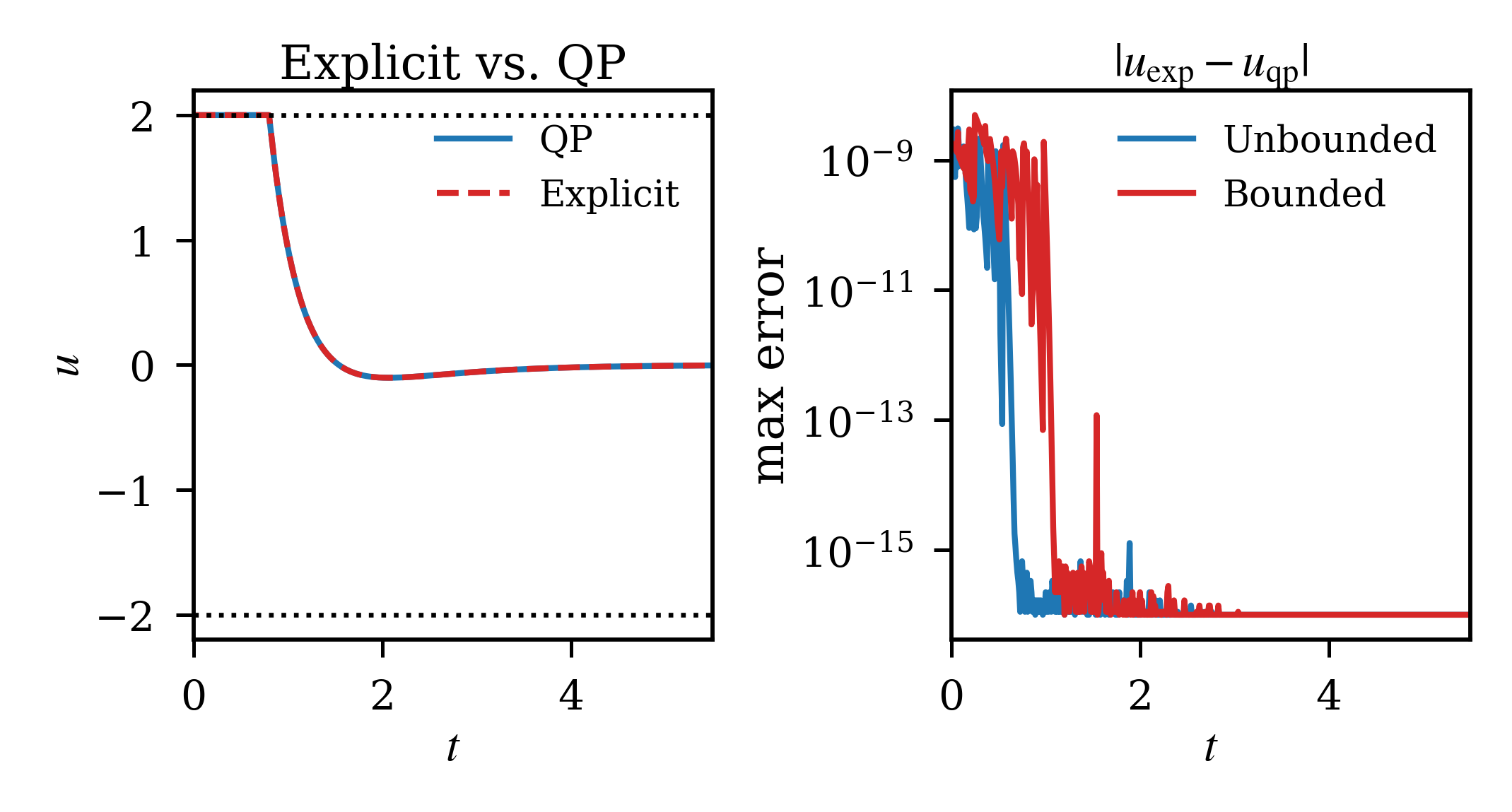
Figure 3: Comparison of the explicit safety filter with QP-based implementation: representative trajectories and maximum input deviation.
Independent Interval Blocks
If the constraints decompose into multiple independent blocks, each acting along a distinct direction, and the cost matrix G is chosen to satisfy a certain compatibility condition, the filter is realized by affine transformations and coordinatewise saturations (in the block coordinates):
S0
Here, S1 stacks the independent block directions; the feasibility domain is the polytope where each block's interval is nonempty and compatible with input bounds. For nondegenerate cases, the explicit law matches the output of the original QP up to numerical precision.
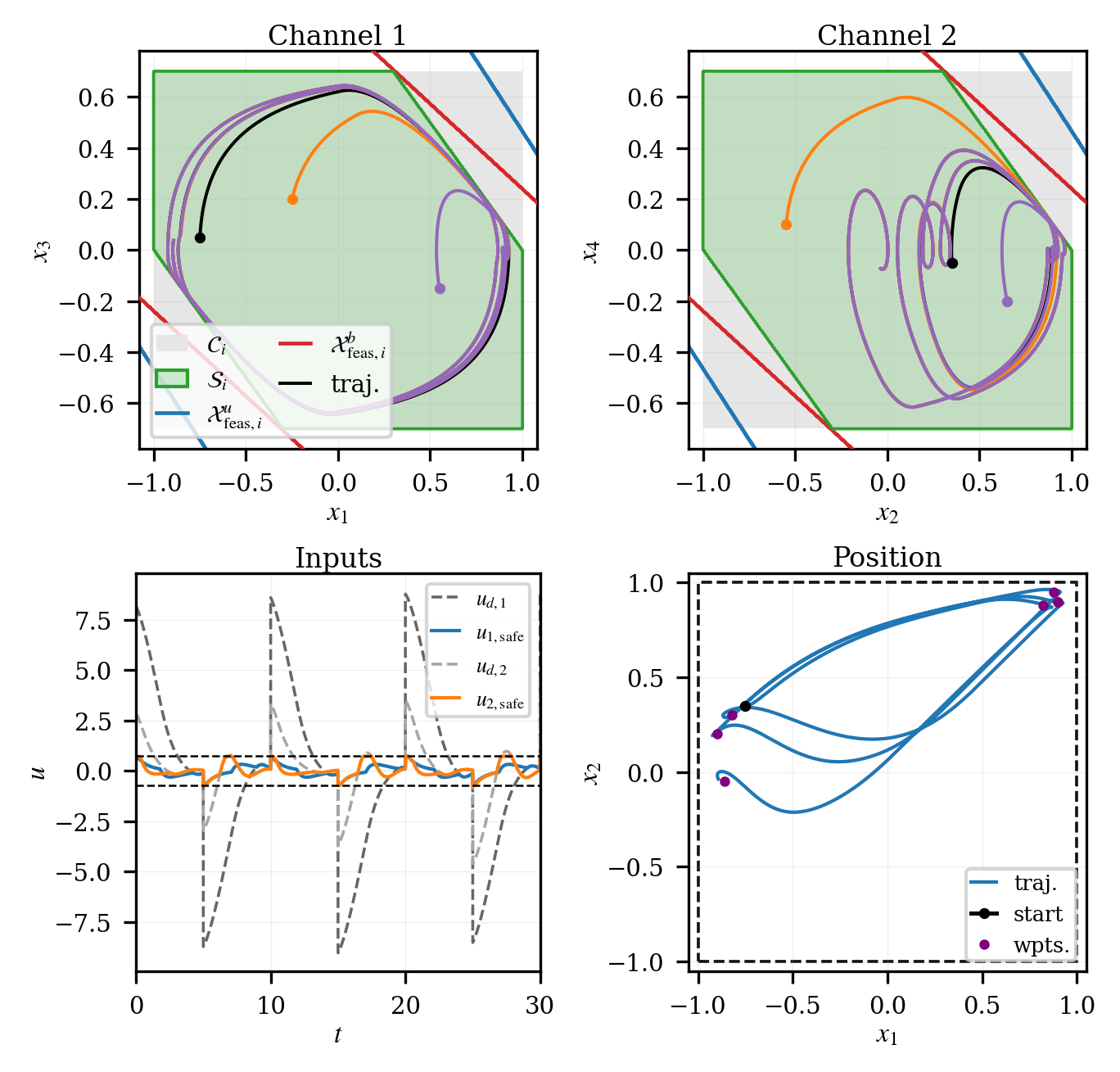
Figure 4: Two-dimensional double-integrator example (planar quadrotor), illustrating axis-aligned independent blocks, feasibility domains, and filtered/nominal input trajectories.
Case Studies and Numerical Evidence
The classic second-order integrator is examined with five safety constraints and input bounds. All constraints are colinear in input space, so the explicit saturating filter applies. Numerical experiments confirm that the analytic law perfectly matches the QP solution. For varying input limits, the feasible set undergoes a strict reduction, visually evident in the shrinking intersection of state-space polyhedra.
2D Double Integrator (Decoupled Blocks)
A planar (two-input) double integrator provides an example of axis-decoupled multiple constraints, each block corresponding to axis-specific position and velocity bounds. The explicit multiblock saturation law yields real-time optimal safety enforcement, even as reference waypoints drive the system near infeasible regions. Simulation confirms set invariance and near-zero discrepancy with QP solutions.
Aircraft Roll–Yaw Dynamics with Mixed Constraint Structures
A linearized aircraft lateral-directional model is controlled using an LQR–PI scheme supplemented by safety filters enforcing operational limits. Here, constraints derive from bounds on both physical outputs and virtual integrator states, naturally forming a set of independent blocks supplemented by actuator constraints possibly aligned in dependent directions. Feasibility is efficiently certified via the dependent direction interval consistency conditions. The closed-loop outputs remain inside prescribed safety bounds for aggressive reference commands.
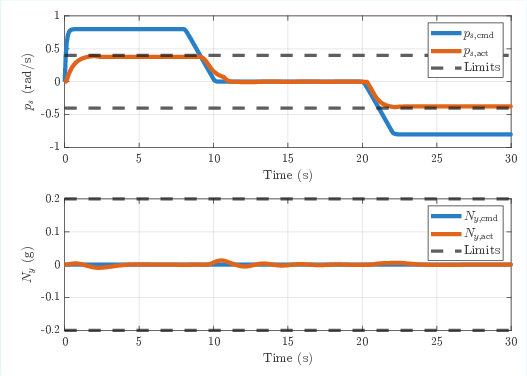
Figure 5: Closed-loop constrained outputs for the aircraft example, demonstrating strict enforcement of safety bounds by the filter during tracking.
Implications and Future Directions
This work provides a definitive perspective on when CBF-based QP safety filters for LTI systems can be replaced with analytic, QP-free control laws. This not only reduces online computational costs but also enables rigorous offline feasibility certification, a core requirement in safety-critical control for aerospace, robotics, and autonomous vehicles. The geometric approach generalizes previously known special cases to broader classes, including overactuated and non-square systems.
Practically, explicit safety filters dramatically improve the verifiability, explainability, and real-time performance of embedded safety mechanisms. Theoretically, defining the boundary between QP-reducible and irreducible cases sets the stage for tight integration with reachability analysis and robust/uncertain systems.
Future research will seek to generalize these structural reductions in the presence of nonlinear dynamics, uncertainty, and higher-order relative degree constraints, as well as integrate explicit barrier-based safety filtering into larger hierarchical and learning-based control architectures.
Conclusion
By leveraging structural properties of constraint geometry for LTI systems, this paper presents analytic feasibility characterizations and explicit CBF-based safety filters under affine constraints—covering parallel, blockwise-independent, and interval-dependent cases. Numerical studies, including high-dimensional and practical aerospace systems, confirm the validity and computational advantages of these formulations. This geometric framework closes key theoretical and practical gaps, ensuring safety-critical controllers can be both efficiently synthesized and rigorously certified offline (2604.04235).