- The paper introduces an exact loop-transformation framework that characterizes stability margins of CBF-QP safety filters for linear systems.
- It employs frequency-domain techniques and convex LMI-based methods to certify and synthesize gain, phase, and delay margins under affine constraints.
- Numerical examples on planar and aircraft dynamics validate the approach, demonstrating enhanced robustness and practical controller design improvements.
Stability Margin Analysis and Synthesis for CBF-QP Safety Filters
Introduction
Control barrier function-based quadratic program (CBF-QP) safety filters are widely used to impose safety constraints on control systems by acting as an intervention layer that minimally modifies a baseline controller to prevent constraint violations. While robust safety—forward invariance of the safe set under uncertainty—has been extensively studied, the impact of safety filtering on closed-loop stability margins remains insufficiently characterized, particularly in the context of disturbances or errors introduced during active safety interventions. The paper "Stability Margins of CBF-QP Safety Filters: Analysis and Synthesis" (2604.04234) addresses this structural gap by systematically characterizing stability margins of CBF-QP safety filters for linear systems under an affine safety constraint, developing both exact robustness characterizations and tractable LMI-based certification and synthesis methodologies.
The study considers a linear system with state x∈Rn and control u∈Rm, and a nominal state-feedback controller unom(x)=−Kx stabilizing the origin under the assumption that A0=A−BK is Hurwitz. Safety is enforced by an affine set constraint h(x)=c⊤x+d≥0. The CBF-QP safety filter is implemented as an online quadratic program to find the control input that is as close as possible to the nominal controller while ensuring the CBF constraint is met. This structure gives rise to a two-mode piecewise-affine closed-loop system: the inactive mode follows the nominal stabilizing controller, while the active mode injects a rank-one correction term to enforce safety.
Crucially, the active-mode dynamics can be written as A0−UV⊤, reducing the analysis of safety interventions to studying the effect of a structured rank-one perturbation to the nominal closed-loop system.
The core technical contribution is the explicit demonstration that the active-mode closed loop admits a scalar frequency-domain loop transformation around the nominal dynamics. Specifically, the closed-loop active-mode system is equivalent to closing a scalar feedback loop with transfer function L(s)=V⊤(sI−A0)−1U. This enables the direct application of robust control theory's gain, phase, and delay margin perspectives to the safety-filtered dynamics.
Stability under perturbation of the correction channel is fully characterized by the roots of 1+ΔL(s)=0. For gain perturbations (i.e., Δ=κ), the maximal interval of κ>0 for which the perturbed active-mode matrix u∈Rm0 remains Hurwitz yields the stability-preserving gain interval. The precise boundaries of this interval correspond to frequencies u∈Rm1 satisfying u∈Rm2 and u∈Rm3.
Further, the analysis of phase and delay margins is reduced to checking the absence of unstable solutions to u∈Rm4 (for phase lag) and u∈Rm5 (for delay), with boundary conditions given in terms of gain-crossover frequencies and corresponding phase criteria.
This exact loop-based reduction sharply distinguishes between preservation of safety (invariance) versus preservation of closed-loop stability—these two properties can be decoupled under structured uncertainty, as shown via a direct CBF inequality analysis.
Tractable LMI-Based Certification and Synthesis
Although exact margins are accessible via frequency-domain computations, the paper introduces convex, tractable LMI-based sufficient conditions for guaranteeing stability margins, enabling certified design for guaranteed robustness ranges:
- For the gain margin, the analysis leverages the affine dependence of u∈Rm6 on u∈Rm7 to translate the margin verification to quadratic Lyapunov inequalities imposed only at the endpoints of any candidate interval u∈Rm8.
- Certified phase and delay bounds are given via bounded real lemma-based LMIs, providing conservative yet tractable certificates for robustness to sector-bounded complex loop perturbations.
- The synthesis problem—choosing u∈Rm9 to maximize the guaranteed gain (or phase/delay) margin—is formulated as an LMI feasibility problem in the standard (change of variables) synthesized-control design pipeline.
These results are algorithmically actionable for both analysis (certification) and controller synthesis.
Numerical Results: Planar and Aircraft Examples
The theoretical framework is validated through illustrative case studies:
- Planar System Example: For a planar system, both exact and LMI-certified gain margins are calculated. The baseline controller yields an exact upper endpoint unom(x)=−Kx0 and certified unom(x)=−Kx1. Synthesis enlarges these margins to unom(x)=−Kx2 (exact and certified align tightly), with improvement in both phase margin and delay margin (from unom(x)=−Kx3 to unom(x)=−Kx4, unom(x)=−Kx5 s to unom(x)=−Kx6 s), demonstrating the efficacy of the designed procedure.
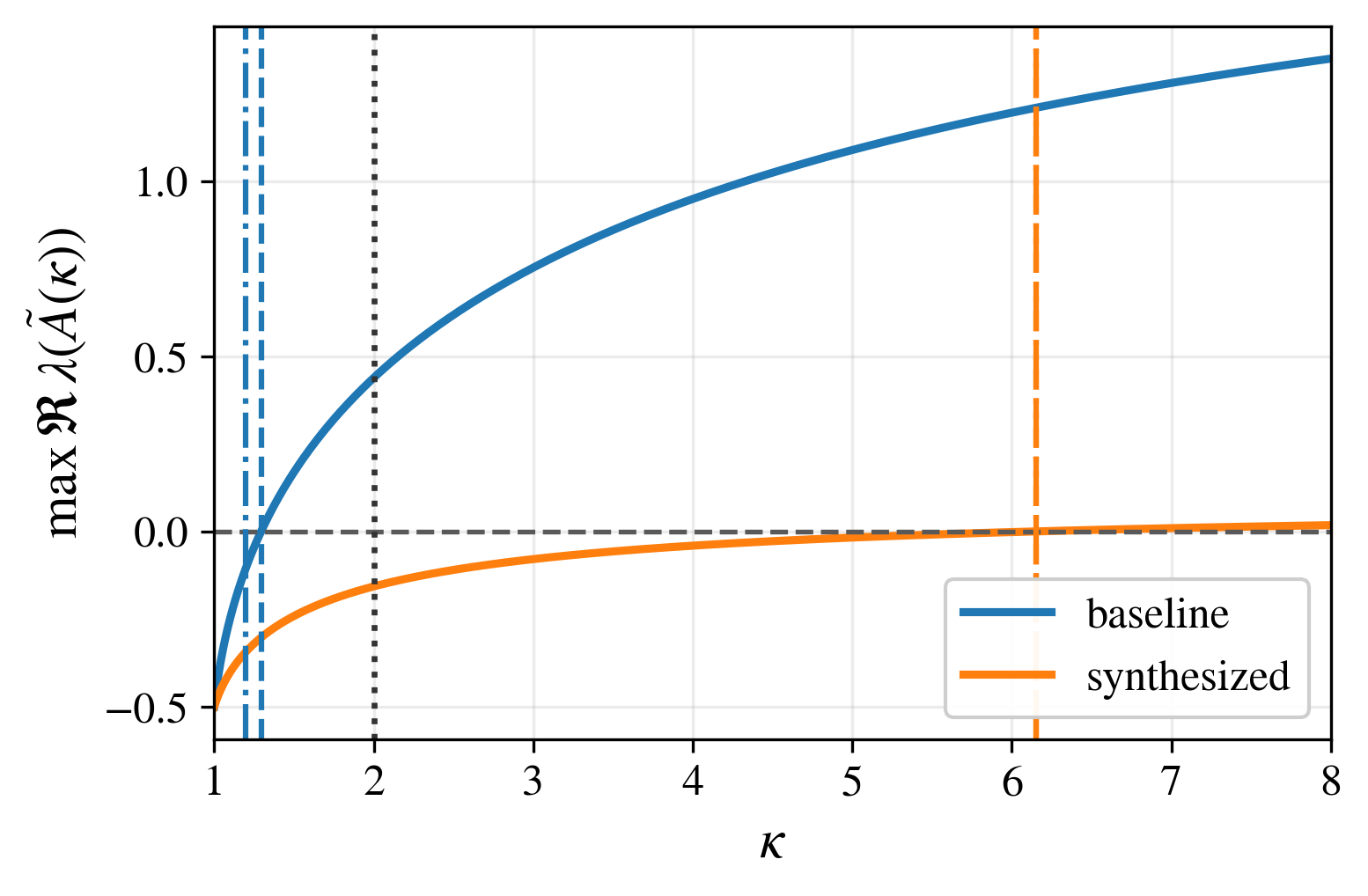
Figure 1: Spectral abscissa of unom(x)=−Kx7 for the baseline and synthesized controllers. Dashed and dash-dotted lines denote exact and certified upper gain endpoints, respectively, and the dotted line marks the target unom(x)=−Kx8.
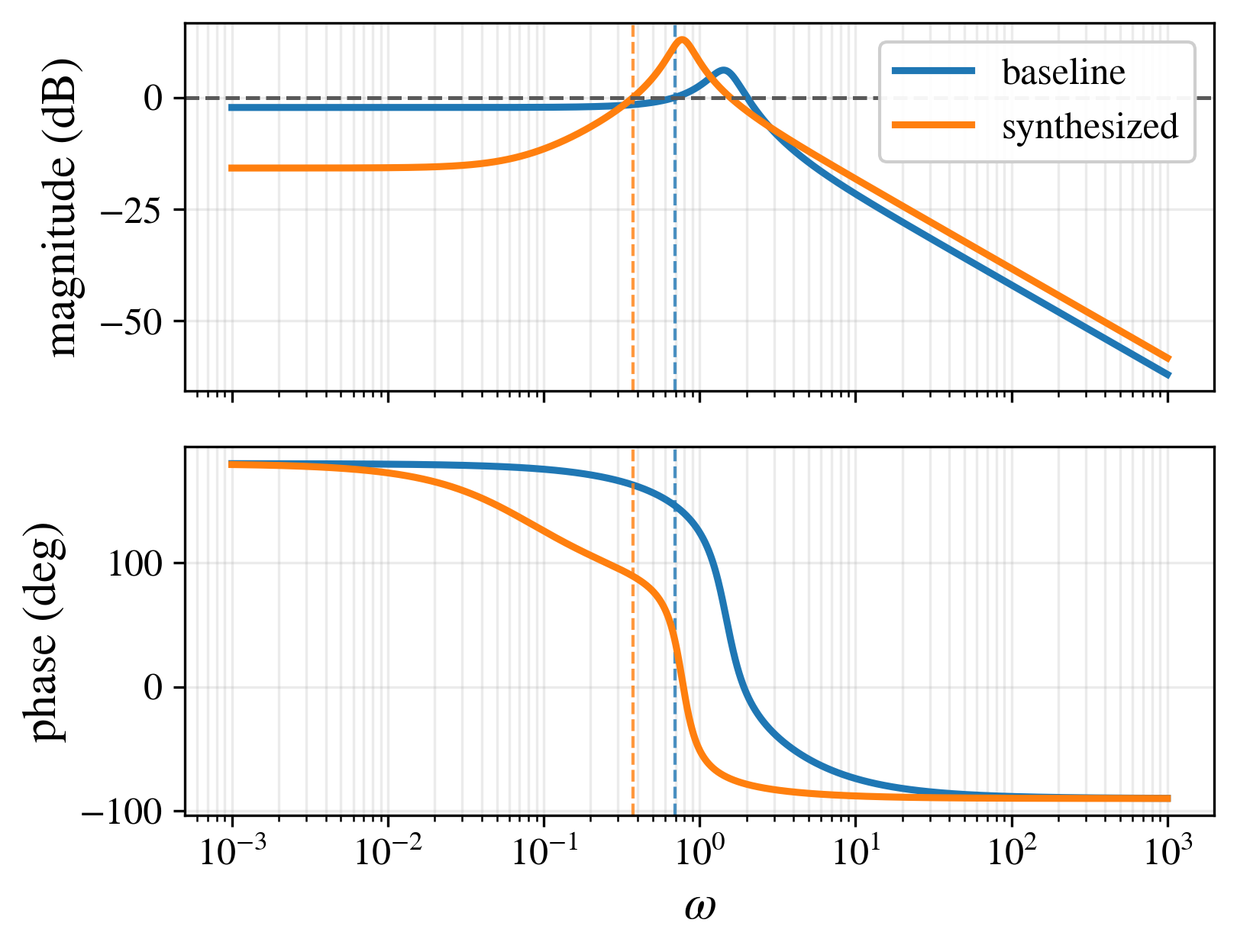
Figure 2: Active-loop Bode plots for the baseline and synthesized controllers. Dashed vertical lines mark the gain-crossover frequencies determining the minimum exact phase margin.
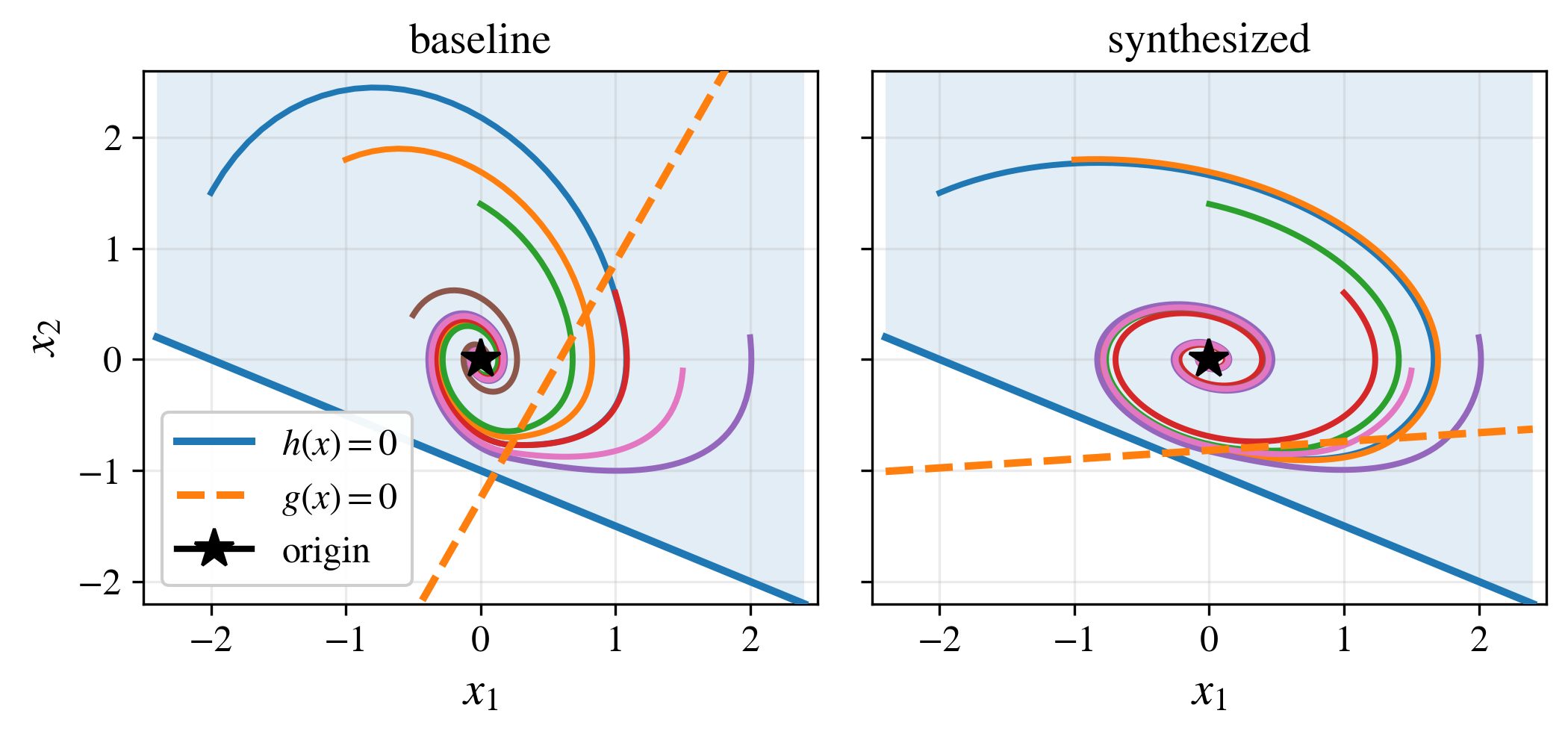
Figure 3: Phase portraits for the baseline and synthesized controllers. The solid and dashed lines denote unom(x)=−Kx9 and A0=A−BK0, respectively.
- Aircraft Roll–Yaw Dynamics: For an aircraft roll–yaw system, the certified gain interval for the nominal controller is limited (A0=A−BK1), with a small phase margin (A0=A−BK2), indicating baseline fragility when the filter is active. After controller synthesis using the proposed LMIs, the certified interval is markedly enlarged (A0=A−BK3), and the exact gain endpoint rises to A0=A−BK4, with a robustified active loop as evident in frequency-domain and time-response analyses.
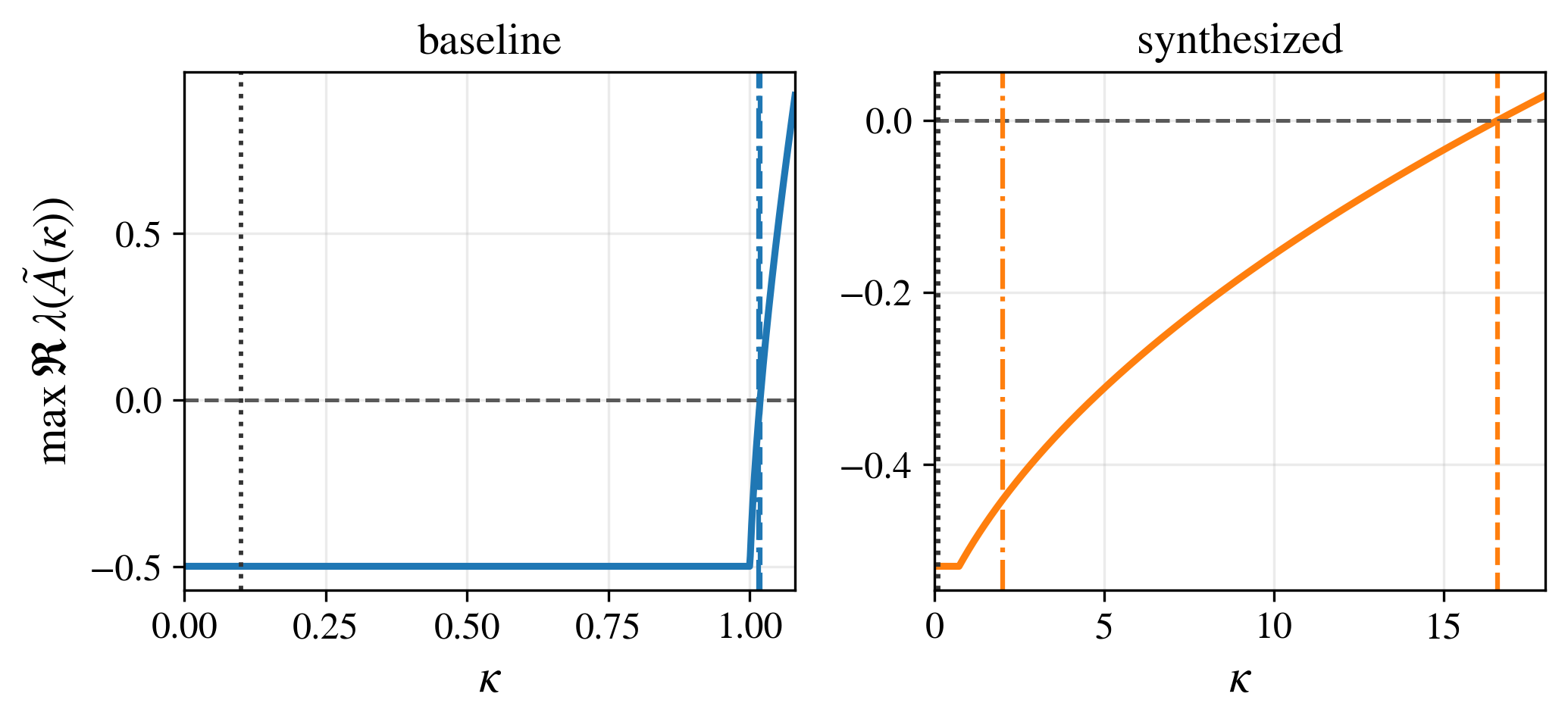
Figure 4: Spectral abscissa of A0=A−BK5 for the baseline and synthesized controllers. Dashed lines denote exact upper gain endpoints, and dotted lines denote the certified design targets.
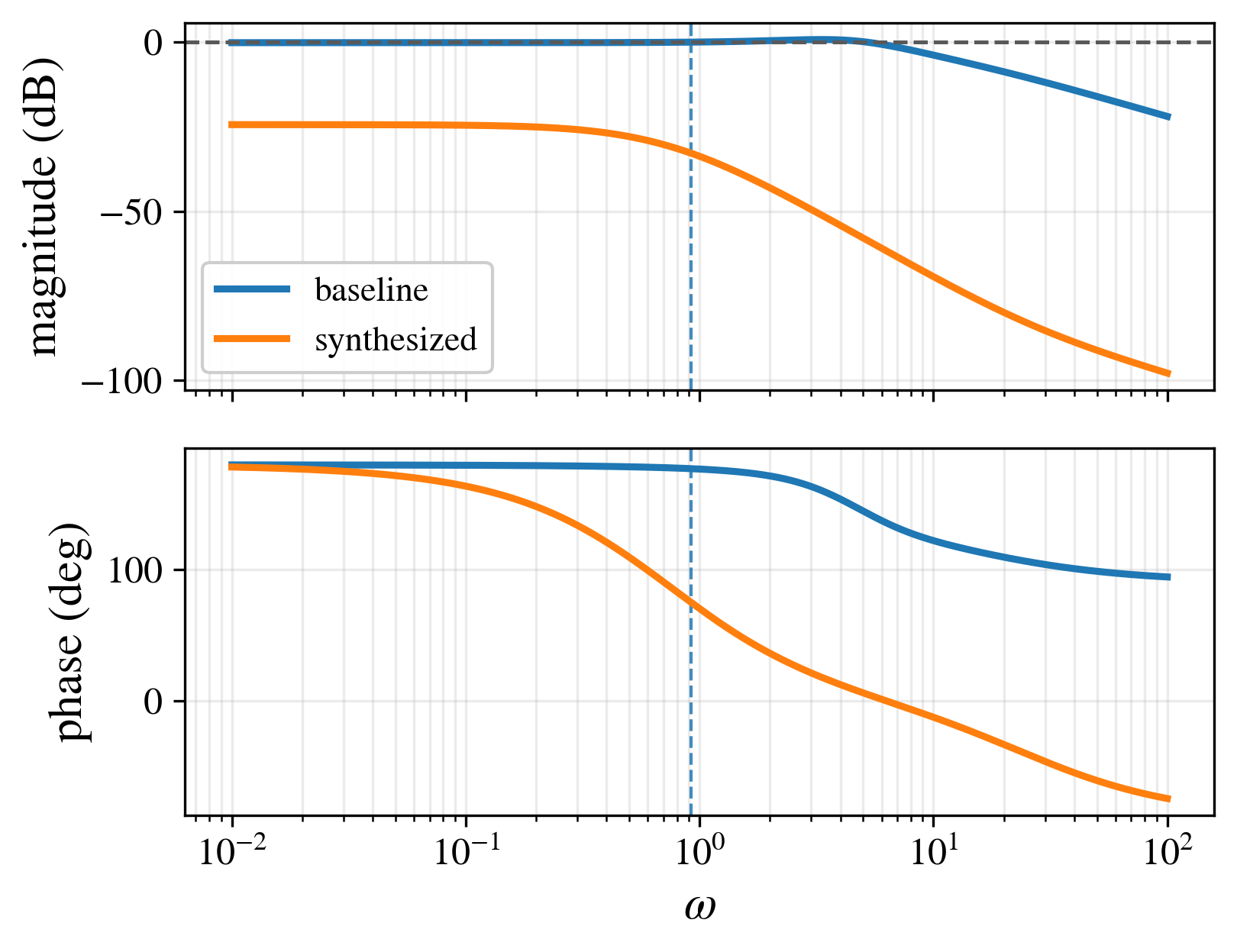
Figure 5: Active-loop Bode plots for the aircraft example. The baseline controller has a very small phase margin, while the synthesized controller yields a substantially more robust active loop.
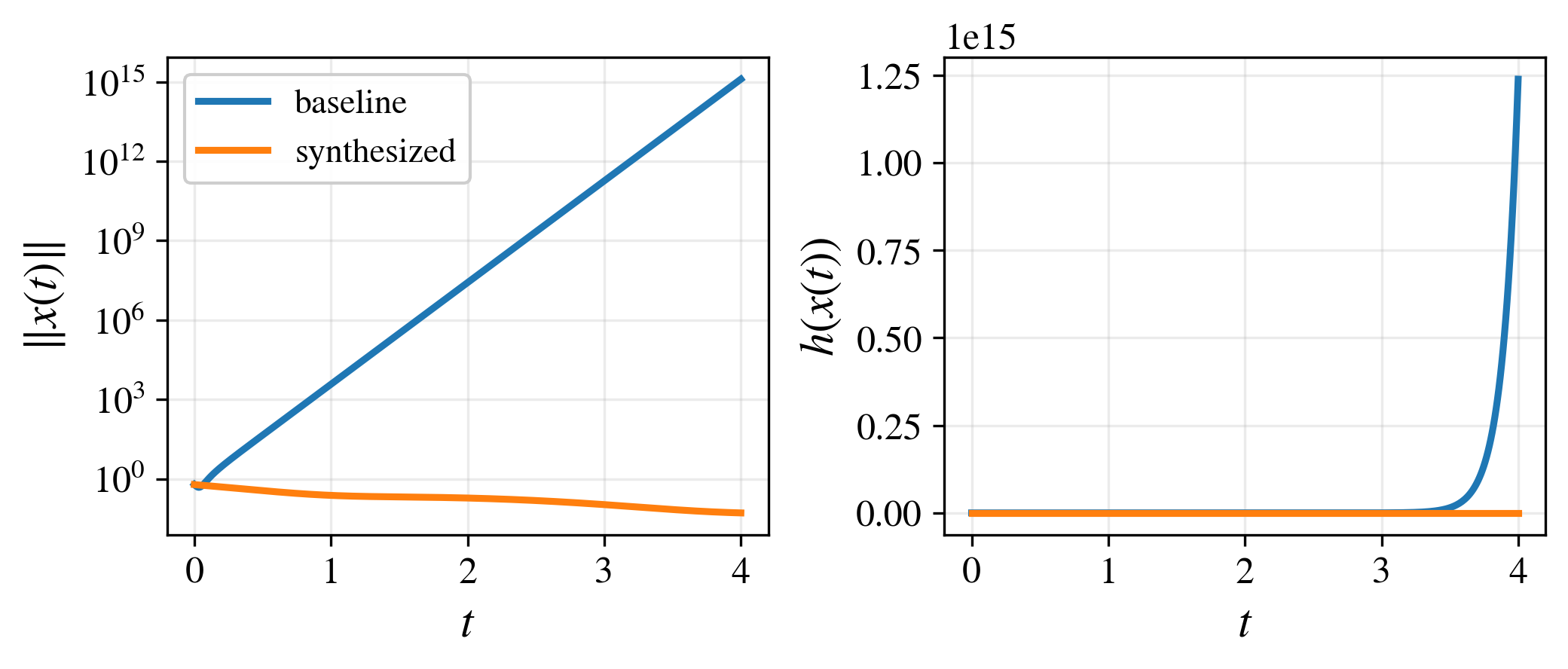
Figure 6: Representative safety-filtered closed-loop responses for the aircraft example, showing state evolution and barrier values for the baseline and synthesized controllers.
Across both examples, the certified margins track the exact margins closely, confirming limited conservatism of the LMI relaxation for practical design. Strong numerical evidence is provided for effective margin enlargement via synthesis.
Implications, Limitations, and Directions for Future Research
Practically, the results supply a principled route for integrating CBF-QP safety enforcement with robust control design, quantifying and certificating not just the standard forward invariance but also the stability robustness margins during potential filter intervention. This structure is critical for high-consequence cyber-physical systems where any stability degradation under active safety intervention is unacceptable.
Theoretically, the loop transformation provides a minimal, canonical reduction of the robust stability question for the structured intervention architecture, paving the way for more refined robust design tools.
Looking ahead, extending this framework to handle multiple (possibly non-affine) barriers, input constraints, hybrid and nonlinear dynamics, and sampled-data settings are open directions of interest. Adapting these methods to learning-based adaptive control regimes, where the nominal dynamics may be uncertain or time-varying, would provide rigorous safety and stability certificates in realistic integrated autonomy stacks.
Conclusion
This work delivers a unified, exact, and certifiable characterization of closed-loop stability robustness for CBF-QP safety filters under affine safety constraints, exploiting the scalar loop structure of the active mode. The approach combines frequency-domain exactness with convex certification and synthesis amenable to controller design, and is validated by strong numerical margins and graphical evidence. These results close a significant structural gap between classical robust control and safety filtering, and set a foundation for robust, certifiably safe autonomy in uncertain environments.