- The paper introduces a framework that separates verified observations from semantic predictions to enable cascade error correction.
- It refines navigation by dynamically retracting erroneous predictions, reducing redundant explorations in ambiguous scenes.
- Empirical results on multiple benchmarks show significant improvements in success rate and efficiency over existing memory models.
Hypothesis Graph Refinement for Embodied Navigation: Structured Hypothesis-Driven Exploration and Cascade Error Correction
Framework Overview and Motivation
The Hypothesis Graph Refinement (HGR) framework advances embodied navigation through explicit separation of verified observations and semantic predictions, introducing dependency-aware memory and error correction to address the dynamics of open-world, long-horizon exploration. HGR systematically organizes the agent's environment representation into a hypothesis graph that incorporates both physically explored nodes with verified semantics and probabilistic hypothesis nodes predicting unexplored regions. This structure enables a tight hypothesis-verification-correction loop, permitting hypothesis-driven frontier selection and memory contraction through cascade deletion of semantically contradicted predictions.
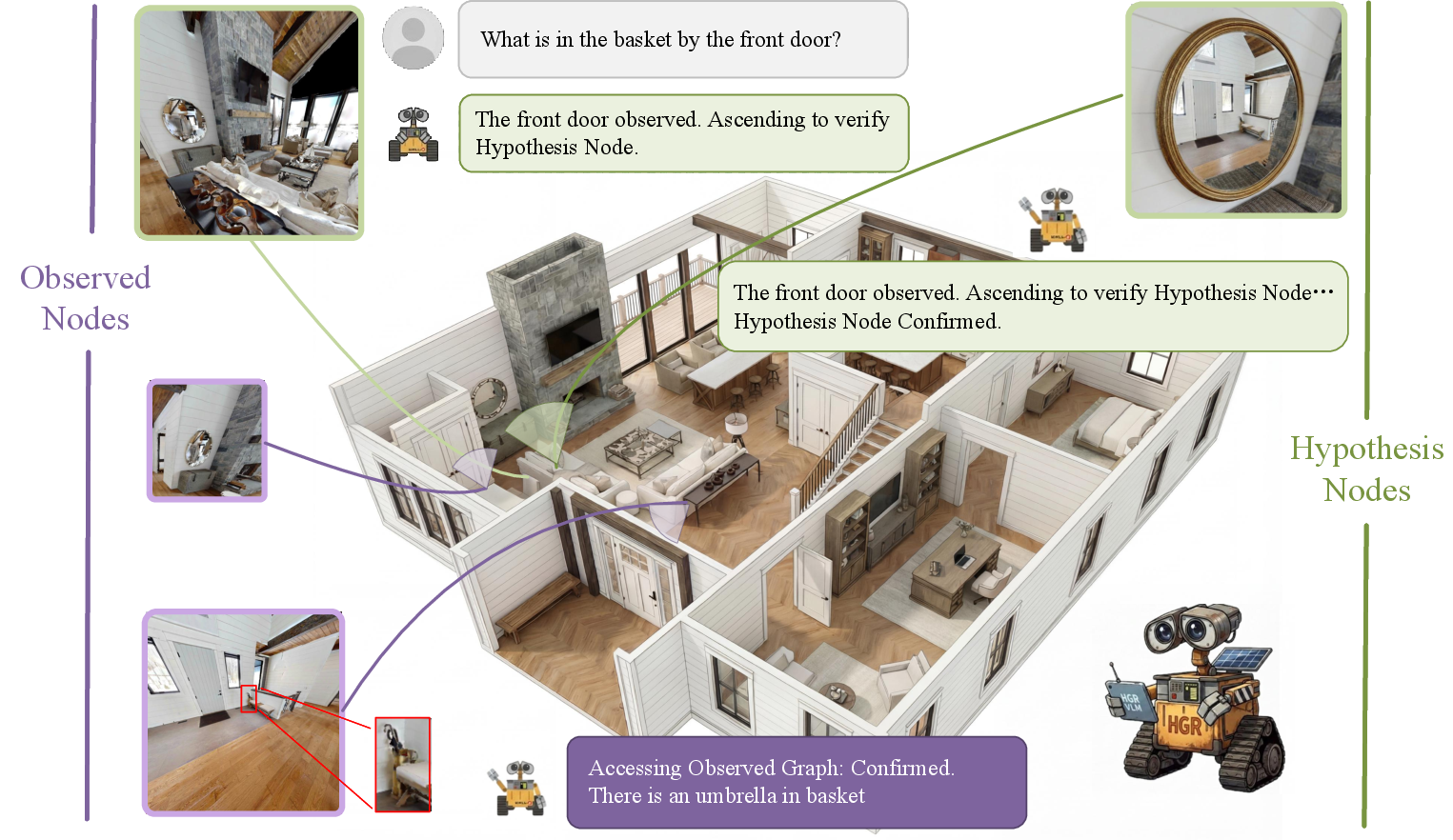
Figure 1: The HGR pipeline segregates observed nodes (confirmed, purple) and hypothesis nodes (frontier predictions, green), enabling dynamic verification and cascade retraction of faulty dependencies.
Traditional navigation approaches and even recent VLM-guided methods yield semantically ambiguous frontiers and propagate prediction errors through persistent memory, resulting in compounding error, particularly in complex or ambiguous scenes such as those containing mirrors, glass, or strong occlusions. HGR addresses these by explicitly modeling derivations and dependencies in a directed acyclic graph (DAG). Hypotheses that are subsequently contradicted during physical exploration propagate their invalidation through all dependent predictions, ensuring that downstream reasoning does not rely on hallucinated or structurally incoherent information.
Model Architecture and Graph Construction
HGR's architecture is centered on incremental, semantic enrichment and maintenance of the hypothesis graph. At each timestep, frontier detection identifies boundary regions of the occupancy map. Semantic hypotheses are generated for these frontiers using VLM-based context-conditioned estimation, while the dependency DAG records derivational relationships from confirmed nodes to their respective hypothesis children.
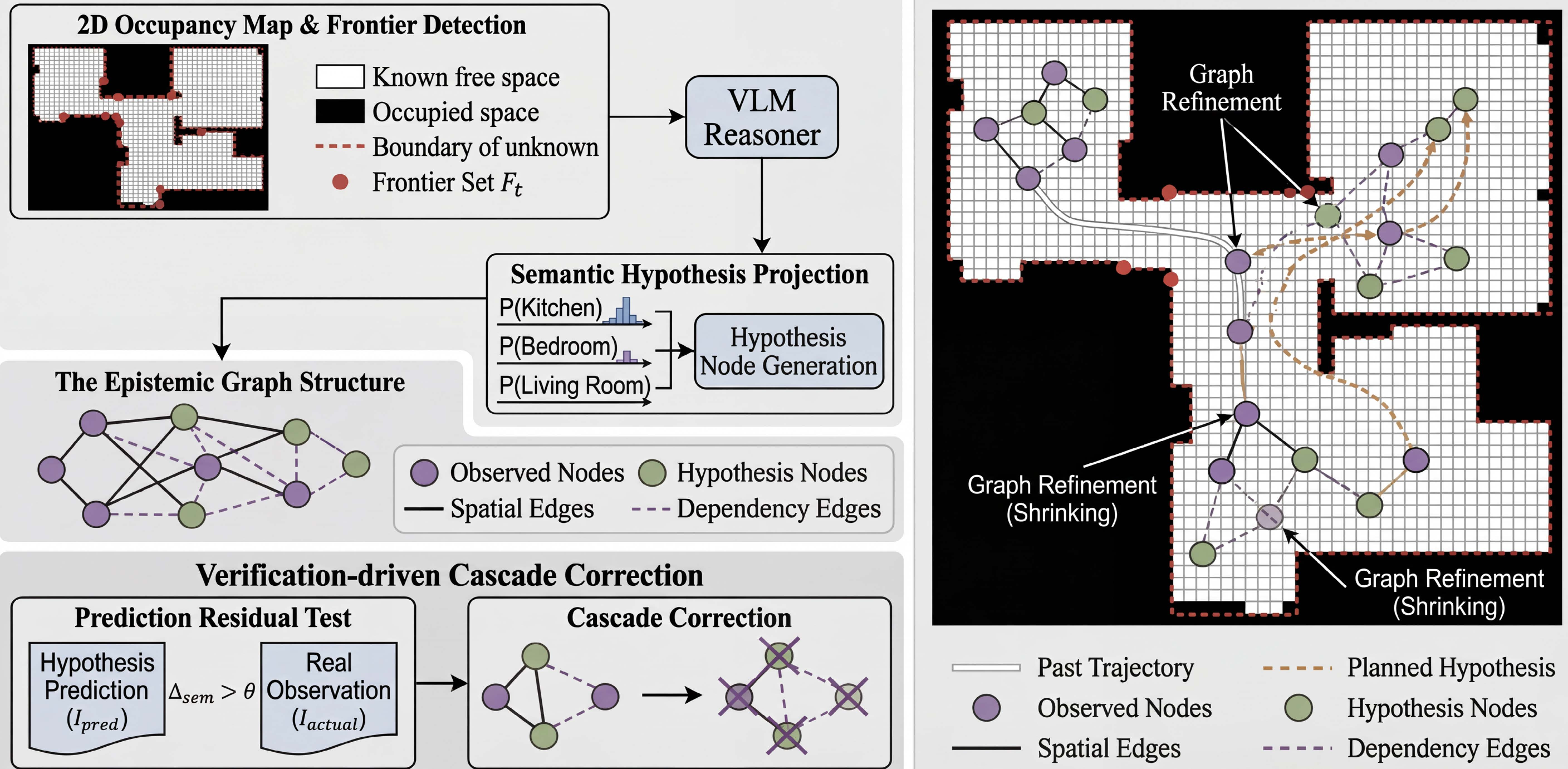
Figure 2: HGR architecture: frontiers are semantically hypothesized and linked via dependency edges; verification outcomes enable graph refinement either by promotion to confirmed node or by cascade deletion.
A crucial innovation is the semantic hypothesis module which, unlike undifferentiated geometric frontiers, projects probabilistic semantic distributions onto frontiers. This allows goal-driven selection of exploration targets based on alignment with navigation objectives, integrated uncertainty, and estimated travel cost.

Figure 3: The module contrasts undifferentiated versus semantic frontier representation, with HGR enhancing the search space with distributed, goal-conditioned hypothesis nodes.
Verification and Cascade Correction Mechanism
Correctness of memory in prolonged and ambiguous exploration settings is enforced via the prediction residual test. This composite metric evaluates the discrepancy between the node's predicted and observed semantics using a weighted combination of category agreement, CLIP-based visual feature similarity, and object set intersection. Upon refutation (residual above threshold), the mechanism traverses the dependency DAG, recursively retracting the entire subgraph conditioned on the erroneous prediction.
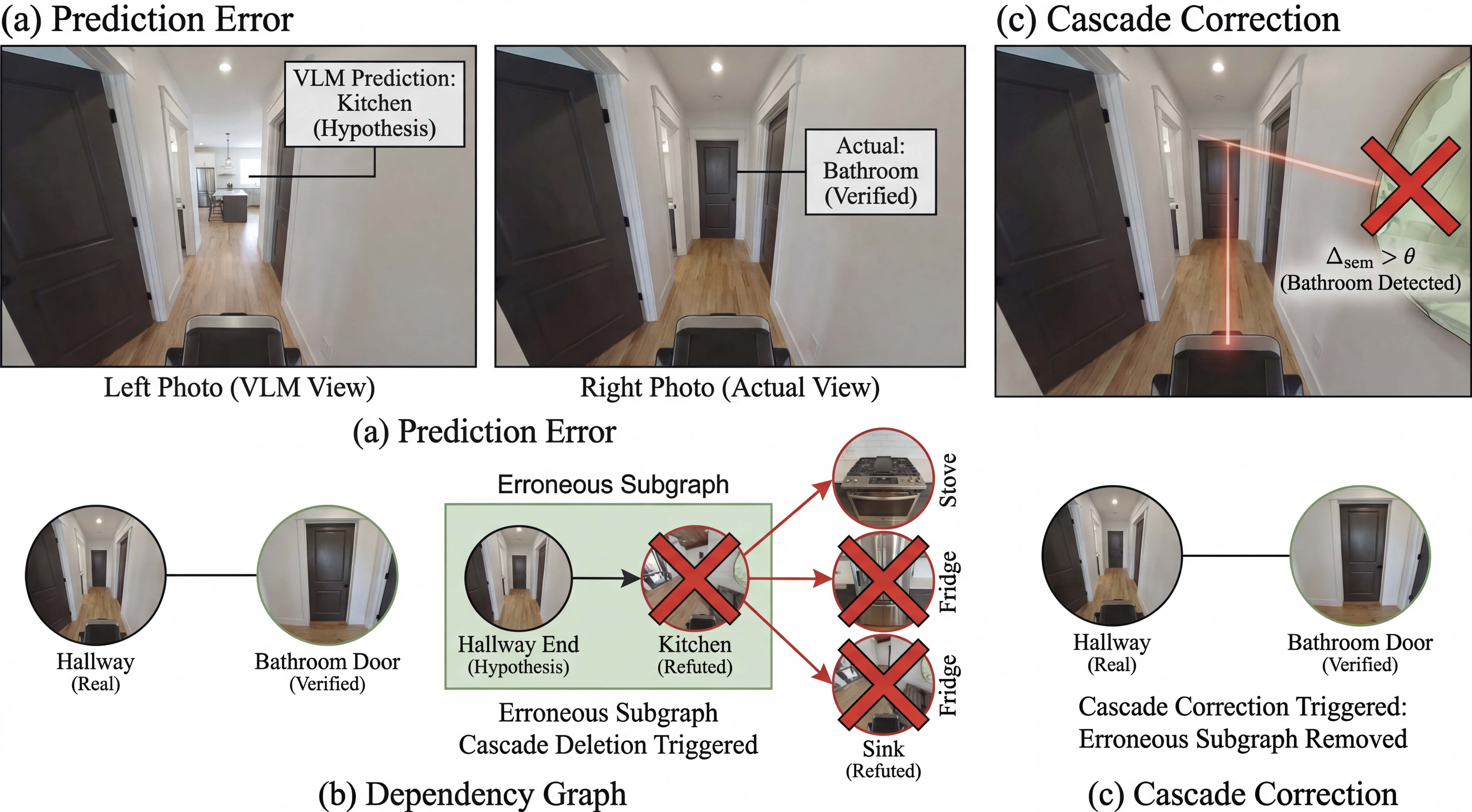
Figure 4: An illustrative VLM error (mirror-induced hallucination) triggers refutation and cascade deletion, efficiently removing all erroneous downstream hypotheses.
Empirical diagnostics confirm that the overwhelming majority of such cascade corrections are induced by predictions associated with specular or transparent surfaces, resolving a dominant failure mode of VLMs in indoor domains.
Experimental Results and Empirical Insights
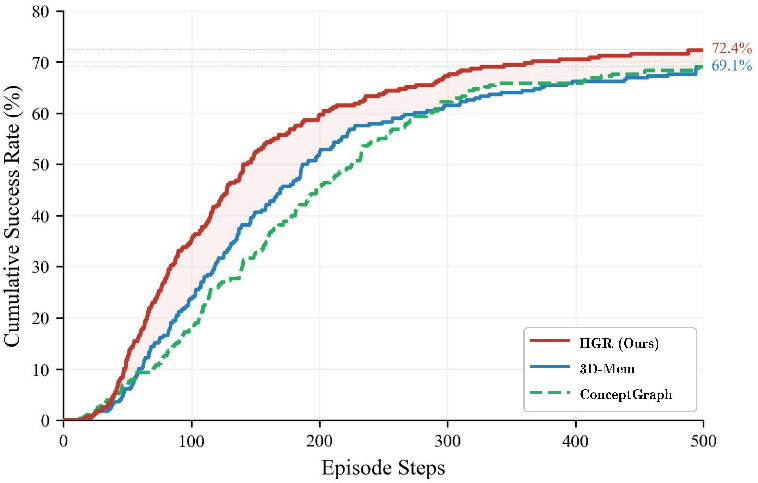
Evaluation on GOAT-Bench for multi-modal lifelong navigation, A-EQA, and EM-EQA demonstrates that HGR provides strong improvements over state-of-the-art memory models:
HGR's systematic removal of erroneous subgraphs contrasts with confidence attenuation or revisitation penalties, the latter merely decreasing the influence of faulty nodes without eradicating their downstream effect. Cascade correction yields a 4.5x reduction in redundant revisits to erroneous regions compared to 3D-Mem.
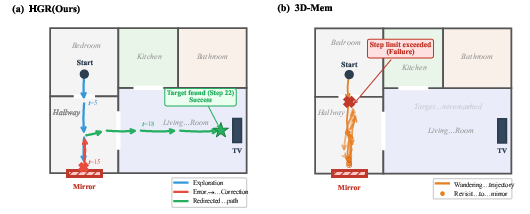
Figure 6: Qualitative episode—HGR removes a mirror-induced erroneous subgraph (left), while 3D-Mem's memory attenuation (right) yields repeated misnavigation.
On question answering tasks (A-EQA, EM-EQA), HGR attains up to +8 LLM-Match improvement, driven by higher-fidelity representations and elimination of memory-persistent hallucination artifacts. Notably, the structure and efficacy of HGR generalize across VLM backbones, including open-source models with lower prediction accuracy, where the value of cascade correction becomes even more pronounced.
Theoretical and Practical Implications
HGR's non-monotonic memory evolution and explicit dependency modeling establish a robust paradigm for maintaining trustworthy long-horizon world models in embodied systems. Unlike purely additive or statistical memory updates, the framework supports memory contraction, sharply reducing structural error propagation, and aligns the memory's content with real-world validation cycles characteristic of embodied intelligence.
This approach raises foundational questions regarding optimal error detection thresholds in verification-driven revision, trade-offs between aggressive and conservative pruning, and the computational-complexity advantages of dependency-aware memory contraction. Practically, HGR's grow-and-prune memory dynamics yield reduced memory consumption and lower wall-clock times for comparable episode budgets as environments become increasingly known.
Limitations and Future Directions
The accuracy of the cascade correction is contingent on the reliability of the prediction residual. Inaccurate thresholds yield false negatives (missed error propagation) or false positives (over-pruning valid hypotheses). The VLM's own limitations, particularly in visually ambiguous, occluded, or complex spatial setups, remain the dominant failure mode. Future work must explore more context-sensitive residuals, model uncertainty at hierarchical spatial and semantic granularities, and extend the graph dynamics to handle inherently dynamic, non-static environments.
Conclusion
HGR constitutes a theoretically principled and empirically validated methodology for robust, efficient hypothesis-driven exploration in embodied navigation. By unifying explicit semantic prediction, dependency-aware verification, and cascade error correction, HGR circumvents the compounding limitations of both geometric and VLM-guided additive memory frameworks. The realization of robust, shrinkable, and structurally consistent long-horizon memory in embodied agents sets the stage for subsequent theoretical analysis and advances in VLM robustness, open-world reasoning, and persistent memory management for autonomous systems.
Reference:
"Hypothesis Graph Refinement: Hypothesis-Driven Exploration with Cascade Error Correction for Embodied Navigation" (2604.04108)