- The paper's main contribution is the integration of CVaR constraints into MPPI to manage tail risks in safety-critical control tasks.
- It presents a novel framework that models latent uncertainties and employs online particle belief updates for risk-sensitive trajectory planning.
- Empirical results in robotic manipulation demonstrate enhanced safety and higher task success compared to traditional risk-neutral and chance-constrained methods.
Risk-Constrained Belief-Space Optimization for Safe Control under Latent Uncertainty
Overview
The paper "Risk-Constrained Belief-Space Optimization for Safe Control under Latent Uncertainty" (2604.03868) introduces a risk-sensitive belief-space Model Predictive Path Integral (MPPI) control framework that addresses safety-critical control under latent uncertainty. The principal contribution is the integration of Conditional Value-at-Risk (CVaR) constraints within belief-space control synthesis, allowing explicit regulation of the tail risk associated with safety violations induced by latent parameter uncertainty. By modeling latent parameters and their effects on trajectory feasibility, costs, and safety constraints, the framework leverages online particle belief updates to infer latent system attributes and subsequently plan compliant actions under uncertainty.
Latent uncertainties, often derived from unobserved parameters such as physical properties, exogenous disturbances, or environment geometry, pose significant challenges in control tasks where safety is critical. The paper formalizes the control problem in a partially observed stochastic system whose dynamics, stage costs, and safety margins are functions of an unknown time-invariant latent parameter θ, maintained as a posterior belief distribution. The safety function h(x,θ) encodes the safe set, with trajectory safety margin MH representing the minimum value along a predicted trajectory. The optimization problem seeks a control sequence that minimizes the sum of expected performance and CVaR-regularized objective while enforcing a CVaR constraint on the negative trajectory safety margin:
uminEbt[JH]+λrCVaRβc(JH)subject toCVaRβs(−MH)≤0
This formulation captures the sensitivity to tail risks in both objectives and constraints and allows tuning of conservativeness via confidence levels (βc, βs) and risk weight (λr).
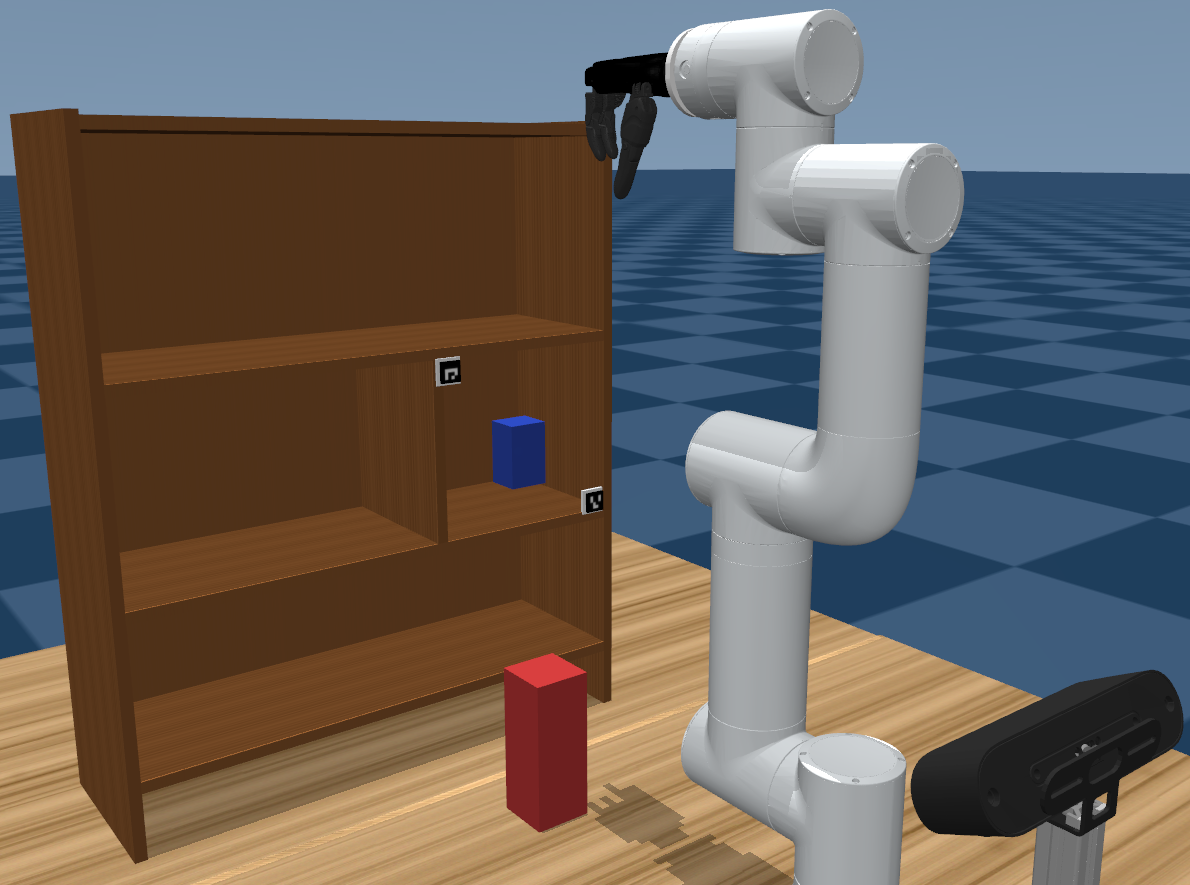


Figure 1: Illustrative example of a robotic manipulator inserting an object into a slot with pose uncertainty, contrasting risk-neutral and risk-aware configurations.
Algorithmic Approach: Risk-Sensitive MPPI
The proposed solution employs a modified MPPI algorithm, structured to accommodate belief-space uncertainty and CVaR objectives/constraints. The algorithm maintains a particle filter-based representation of the latent parameter posterior, samples control sequences, and simulates rollouts for each combination of candidate input and belief particle. During each rollout, it computes trajectory costs and safety margins, constructing empirical CVaR estimates for both performance and safety. It then computes MPPI weights and updates the control sequence, applying only the first control element per iteration.
The framework's ability to synthesize actions robust to highly variable latent model features is enabled by the flexibility of CVaR as a risk measure, capturing rare but consequential violations which conventional mean- or probability-based constraints fail to regulate.
Theoretical Guarantees
Three key properties characterize the controller:
- CVaR Safety Implication: The constraint CVaRβs(−MH)≤0 guarantees, by construction, that Pr(MH≥0)≥βs.
- Risk-Neutral Limit Behavior: As risk weight λr→0, the solution converges to the risk-neutral optimal, demonstrating consistency with classical stochastic control.
- Cumulative Safety Guarantee: Via a union bound, a per-horizon safety guarantee extends over repeated receding-horizon executions, bounding cumulative violation probability.
These properties provide formal assurances regarding safety violation probability, convergence, and applicability in a repeated online MPC context.
Empirical Validation
A vision-guided dexterous stowing task is employed to benchmark the framework. The manipulator's task is to insert a grasped box into a narrow, occupied shelf slot, with significant pose estimation uncertainty. The latent parameter h(x,θ)0 (slot geometry) is inferred from noisy visual data and represented as a particle belief.
Simulation parameters include:
- MPPI trajectory budget: h(x,θ)1 candidates, h(x,θ)2 horizon steps, h(x,θ)3 particles per belief update
- Risk parameters: h(x,θ)4, h(x,θ)5
- Safety function incorporates clearance and contact force constraints
- Performance compared across CVaR-MPPI and a chance-constrained baseline
Primary results demonstrate:
- At high risk aversion h(x,θ)6, the controller achieves 82\% task success with zero contact violations, compared to 55\% and 50\% for risk-neutral and chance-constrained baselines respectively.
- Catastrophic contact forces (up to h(x,θ)7 N) occur under low risk aversion h(x,θ)8, whereas increasing h(x,θ)9 to MH0 or MH1 eliminates contact entirely.
- The CVaR constraint, unlike probability-based constraints, regulates the magnitude of violation, producing trajectories with safer physical clearances.
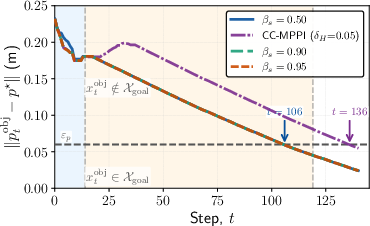
Figure 2: Representative trajectories across approach and insertion phases, demonstrating superior safety behavior at higher MH2.
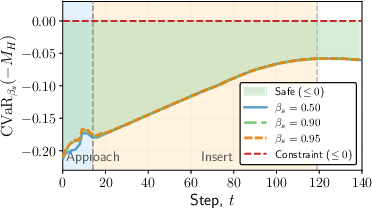
Figure 3: Evolution of CVaR safety constraint margin for different confidence levels, highlighting the stringent regulation of safety in high-aversion settings.
The empirical evidence supports the claim that CVaR-based safety constraints confer superior protection against tail risks and significantly improve task reliability under latent uncertainty.
Practical and Theoretical Implications
This framework enables principled risk management for systems operating under latent uncertainty, directly supporting applications in robotic manipulation, autonomous vehicles, and any scenario where state estimation or environmental perception is inherently noisy and safety-critical. The ability to tune conservativeness and balance expected performance with tail risks advances practical safety beyond conventional chance constraints.
Theoretically, this approach unifies risk-sensitive stochastic control and belief-space planning, establishing formal safety guarantees and demonstrating consistency with classical approaches. The incorporation of CVaR constraints extends applicability to settings with heavy-tailed or non-Gaussian uncertainty distributions.
Future developments may focus on:
- Handling correlated observation noise in belief updates
- Generalization to time-varying or dynamic latent parameters
- Extension to multi-agent coordination under joint latent uncertainties
- Real-time execution improvements on embedded hardware
Conclusion
The paper provides a rigorous formulation and solution for belief-space control under latent uncertainty, explicitly constraining tail risks via CVaR and yielding both practical safety guarantees and improved task performance. Numerical results validate the superior efficacy of CVaR-based safety regulation compared with probability-based alternatives, particularly in highly uncertain tasks. Theoretical contributions include probabilistic safety bounds and limits for risk-neutral behavior. Future extensions promise broader applicability in increasingly complex, uncertain environments.