- The paper introduces a neural ODE framework that leverages bi-Lipschitz mappings to guarantee global exponential stability for any pair of states.
- It employs natural gradient flows and Lyapunov functions to enforce safety by ensuring forward invariance within complex safe sets.
- Empirical evaluations demonstrate the method’s all-pairs planning generalizability and feasibility for data-driven, real-time robotic navigation.
Goal-Conditioned Neural ODEs with Certified Safety and Stability for All-Pairs Motion Planning
This paper proposes a novel method for synthesizing smooth, goal-conditioned dynamical systems for motion planning that guarantee safety (forward invariance with respect to a prescribed safe set) and global exponential stability for arbitrary pairs of initial and goal states in robotic environments with complex geometric constraints (2604.02821). The motivation arises from limitations of classical sampling-based planners such as PRM and RRT, which lack global smoothness, all-pairs capability, and amenability to learning frameworks. Prior dynamical systems approaches, including potential fields and navigation functions, either suffer from local minima or lack constructive generalization to highly nontrivial environments.
The central challenge addressed is the joint learning of a continuous-time dynamical system f(x,x⋆), parameterized as a neural ODE, that is:
- Globally exponentially stable with equilibrium at any x⋆ in a geometrically complex safe set X
- Guaranteed to never violate hard safety constraints
- Compatible with generalization and learning, including learning from demonstration (LfD)
Methodology: Bi-Lipschitz Diffeomorphic Mapping and Natural Gradient Flows
The approach parameterizes a bi-Lipschitz diffeomorphism g:X→Bn (unit ball), implemented via a neural network (e.g., BiLipNet), which regularizes and controls the geometric properties of the mapping, including explicit bounds on distortion and invertibility. The system dynamics are defined as a natural gradient flow with respect to a Lyapunov function
V(x,x⋆)=2λ∥g(x)−g(x⋆)∥2,
leading to dynamics
x˙=−M(x)−1∇xV(x,x⋆),
where M(x)=G(x)⊤G(x) with G(x) the Jacobian of g.
This construction has several crucial theoretical properties:
- Global Exponential Stability: The system remains globally exponentially stable for all initial/goal configurations, with explicit convergence rate and overshoot bounds in terms of the bi-Lipschitz constants.
- Safety via Forward Invariance: Safety is certified using barrier functions derived from the mapping g, ensuring solutions never exit the admissible set x⋆0.
- Generalization: The policy is goal-conditioned and works for arbitrary goal locations, not just those seen during training, since the geometric regularity is encoded by x⋆1.
- Hard Bounds: The bi-Lipschitz property yields explicit bounds on the allowable speed (x⋆2) and robust tracking under moving-goal assumptions.
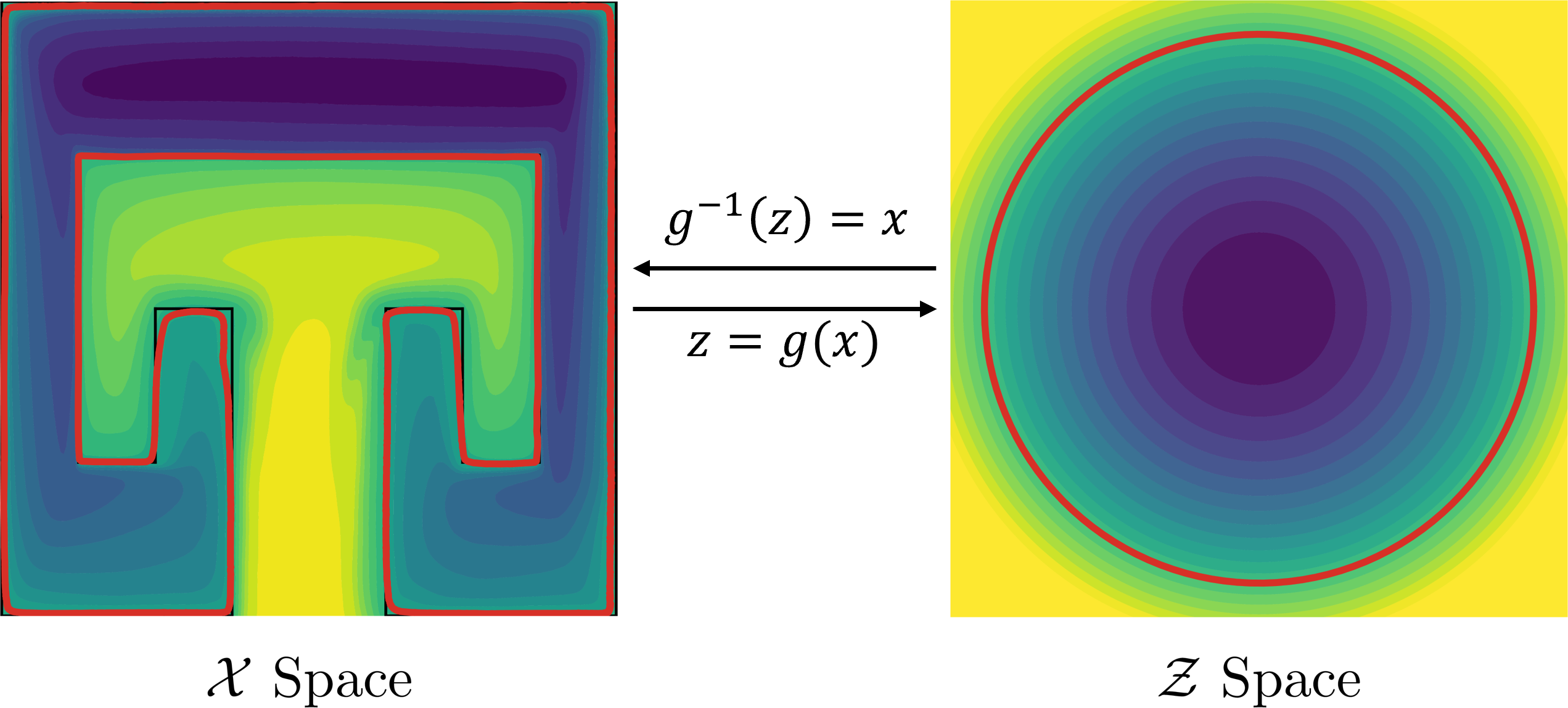
Figure 1: Illustration of the bi-Lipschitz diffeomorphic mapping transforming a complex safe set x⋆3 into a unit ball x⋆4, enabling linear planning in latent space with the guaranteed pullback of safety and stability.
Comparison with Prior Methods
The methodology generalizes and extends classical navigation function techniques by constructing the mapping x⋆5 via optimization (learning) rather than analytic means, and by separating certificates for stability (Lyapunov function) and safety (barrier function). This avoids the need to recompute or redesign the mapping for each new goal state, overcoming a key limitation of prior approaches, and provides tractable training objectives compatible with standard machine learning toolchains.
Contrary to standard gradient flow dynamics, which can violate safety when goals change, the use of natural gradient flow (metric-induced) guarantees that the vector field points inward at the boundary for all goals.
Moreover, by leveraging bi-Lipschitz neural architectures (e.g., BiLipNet), the model is regularized against overfitting, with explicit generalization capabilities for all-pairs planning. Explicit bounds and tractable inversion algorithms facilitate deployment in real-time and embedded contexts.
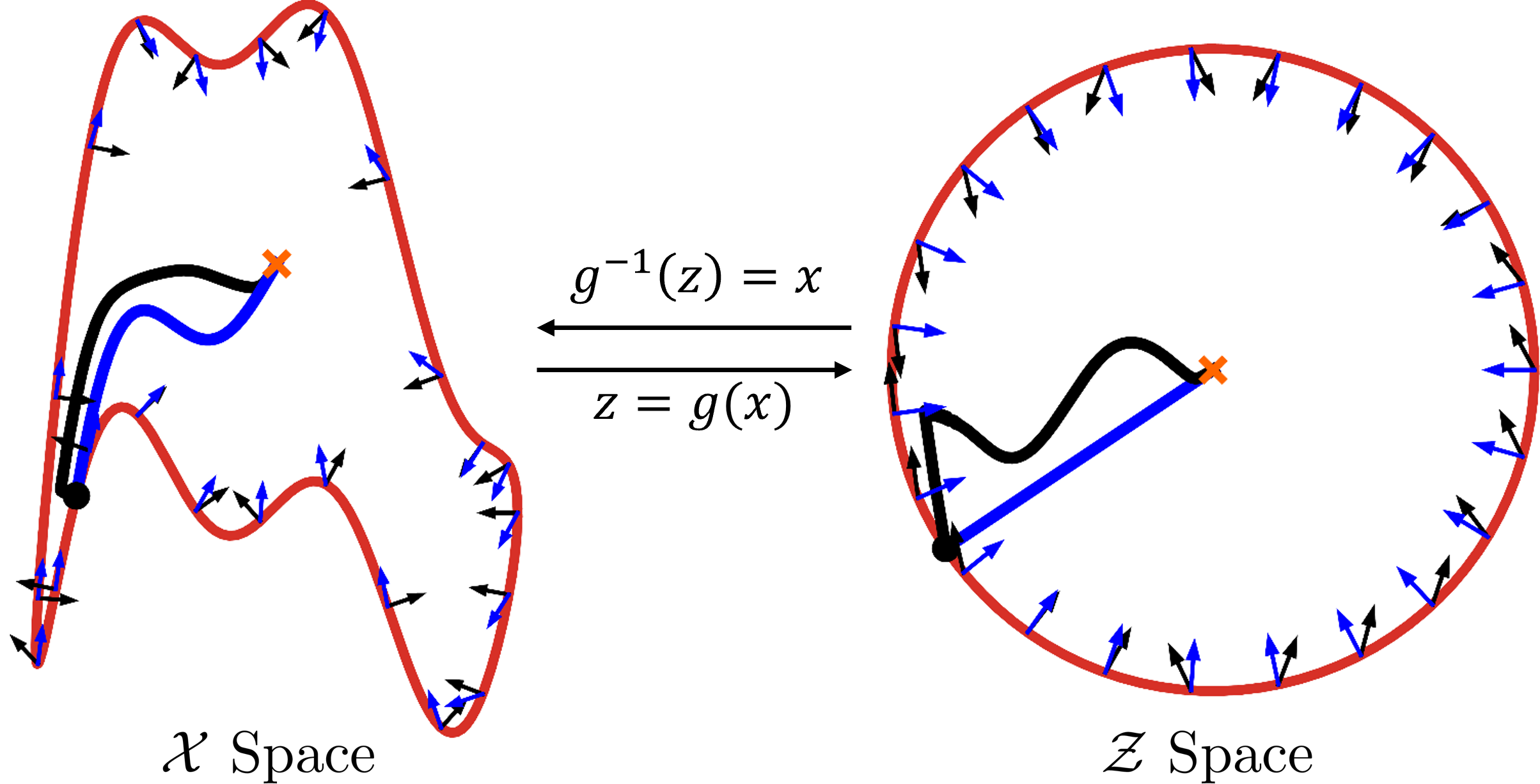
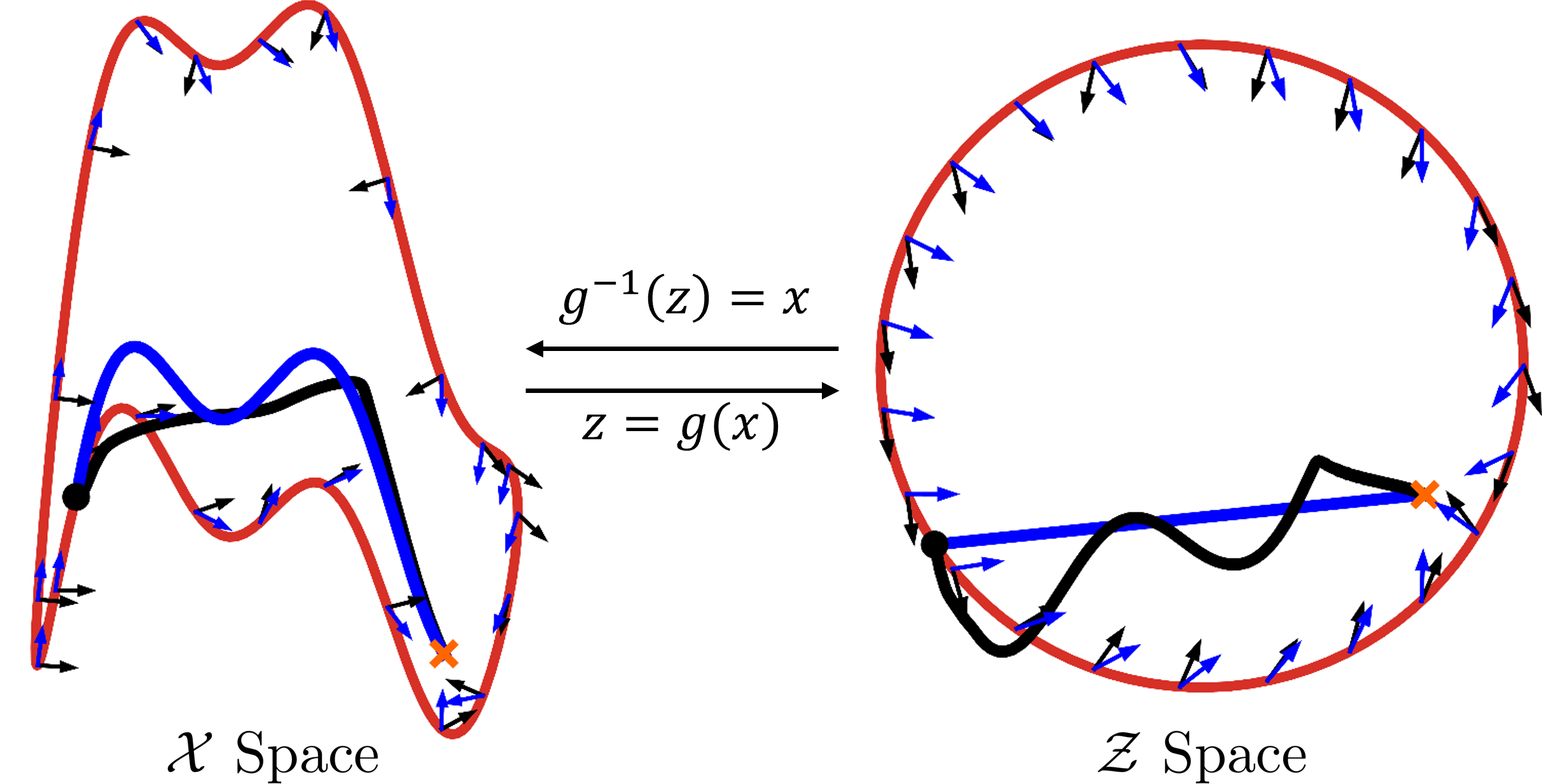
Figure 2: Example trajectories and vector field visualization demonstrating the forward invariance and inward-pointing property of the proposed natural gradient flow at the boundary of the safe set.
Learning Pipeline
The diffeomorphic mapping x⋆6 is trained via labeled data consisting of points in the safe and unsafe sets, augmented with cost-to-go labels constructed using sampling-based planners (e.g., RRT), resulting in distance-informed level set supervision. The overall loss function combines terms for level set separation and (optionally) behavioral imitation from demonstrations. The bi-Lipschitz constants are explicitly enforced as part of the model constraints.
This hybrid approach leverages graph-based geometric information and learning-from-demonstration within a single pipeline, allowing the dynamical system to encode both geometric constraints (safety) and task constraints (through demonstration data).
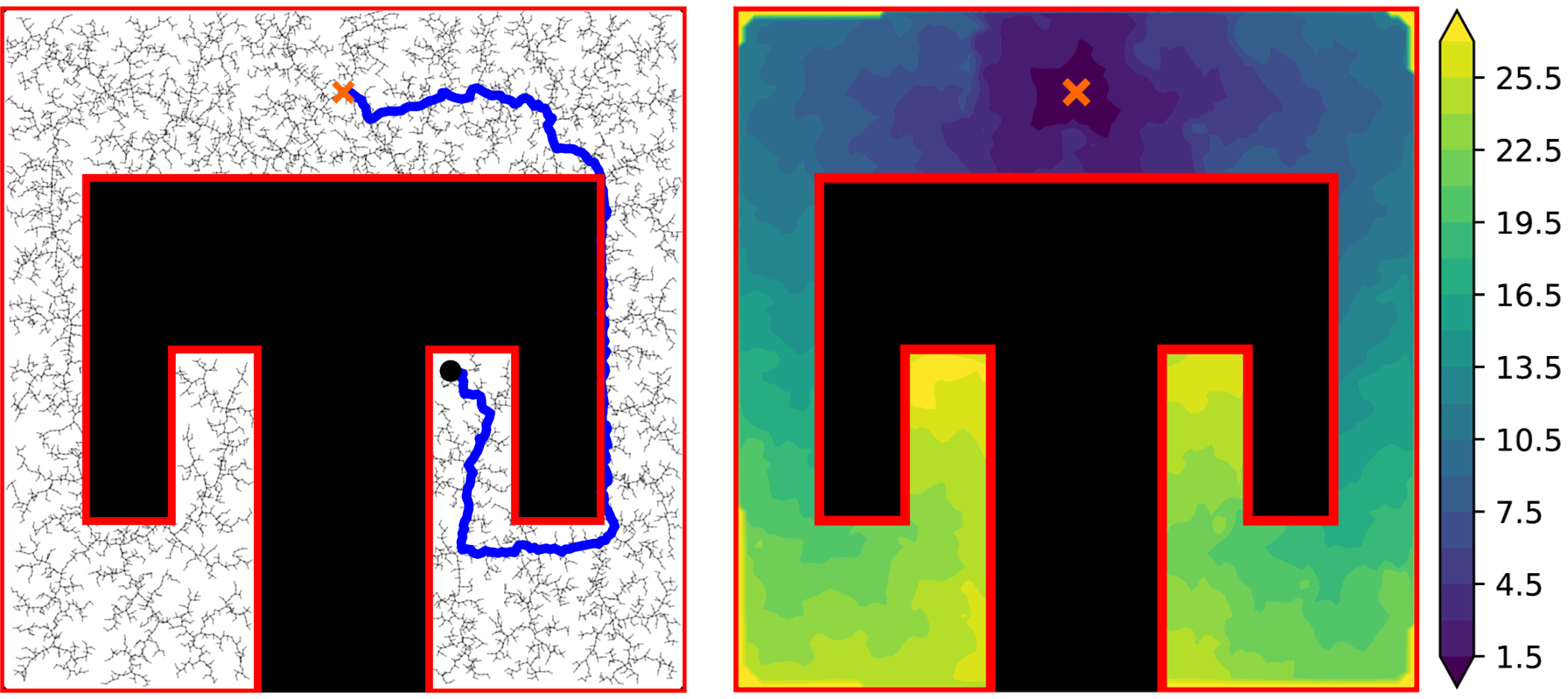
Figure 3: Visualization of the data-generation procedure using RRT, showing sample distributions and cost-to-go field utilized during training.
Empirical Evaluation
The method is validated on a 2D corridor navigation task characterized by nontrivial obstacle geometry. Experiments demonstrate:
- The learned x⋆7 maps the safe set x⋆8 bijectively and smoothly onto the unit ball, encoding the obstacles precisely.
- Trajectories generated by solving the ODE dynamics correspond to safe, smooth paths that strictly respect the obstacle geometry and converge to the goal with exponential rate.
- Notably, the trained model generalizes to arbitrary goal locations without retraining (all-pairs capability).
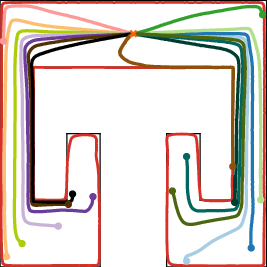

Figure 4: Generated trajectories showing smooth, obstacle-avoiding navigation in the original x⋆9-space and corresponding straight-line motions in the X0-space after mapping by X1.
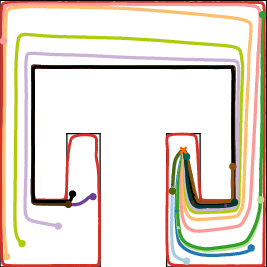

Figure 5: Generalization of the planner to a previously unseen goal; all initial conditions reach the new target safely without model retraining.
Theoretical and Practical Implications
The method provides a rigorous, compositional approach to safe all-pairs motion planning. The combination of Lyapunov-based certification, safety via forward invariance, and explicit geometric modeling using bi-Lipschitz neural networks closes several critical gaps in learning-based motion planning:
- Provable Guarantees: Stability and safety constraints are encoded as hard properties, not soft empirical losses.
- Learning Compatibility: The approach is compatible with gradient-based learning, offline and online, and naturally incorporates demonstration data.
- Generality: It supports all-pairs motion planning for arbitrary initial and final configurations within the safe set.
- Scalability: The reliance on standard neural network architectures and losses facilitates extension to higher-dimensional spaces and more complex robot dynamics.
Potential future directions include adaptation of the methodology to spaces with more complex topology (e.g., safe sets with holes or disconnected components), integration with higher-order robot dynamics, and scaling to high-dimensional manipulation and navigation problems.
Conclusion
This paper delivers a theoretically sound and practically tractable method for learning goal-conditioned neural ODE-based policies that guarantee safety and exponential convergence for all-pairs motion planning. By leveraging bi-Lipschitz diffeomorphic neural architectures, the approach seamlessly integrates hard safety and stability guarantees with flexible, data-driven learning, addressing long-standing challenges in safe, generalizable robot motion planning. The all-pairs generalization and explicit certification represent a significant advance in combining learning-based planning with formal verification frameworks.