- The paper presents a boundary-centric mapping method that reduces memory usage by up to 91.7% for large-scale occupancy grid mapping.
- It leverages a 2D hashgrid projection to achieve average-case O(1) query and update performance, outperforming traditional octree methods.
- Empirical evaluations in urban and MAV environments demonstrated over 99.9% accuracy and robust real-time performance for onboard navigation.
Memory-Efficient Boundary Maps for Large-Scale Occupancy Grid Mapping
Introduction and Motivation
Large-scale occupancy grid mapping is fundamental to robotic planning, perception, and navigation. However, existing grid-based or octree-based approaches incur cubic or superlinear memory costs with respect to environment scale and map resolution, fundamentally limiting their applicability for high-resolution or kilometer-scale tasks. The paper "Memory-Efficient Boundary Map for Large-Scale Occupancy Grid Mapping" (2603.21774) introduces a boundary-centric representation which maintains only a low-dimensional subset—the boundary voxels—within a highly efficient data structure, and demonstrates constant-time query/update schemes suitable for real-time, onboard applications.
The approach addresses the core trade-off in occupancy mapping among memory, update/query efficiency, and representational loss, presenting robust results in urban, campus, and real-world MAV navigation benchmarks.
Boundary-Based Map Representation
Central to the proposed method is the explicit representation of boundary voxels—those at the interface between free and occupied (or unknown) volumes—rather than the full 3D occupancy grid. Instead of representing all free space, the framework catalogues only three special voxel types:
- Boundary interior voxels: free voxels adjacent to occupied/unknown.
- Boundary exterior (unknown) voxels: unknown voxels adjacent to free.
- Boundary exterior (occupied) voxels: all occupied voxels.
This partition, paired with local occupancy determination rules, allows the global state of any voxel to be efficiently inferred with access only to boundary information.
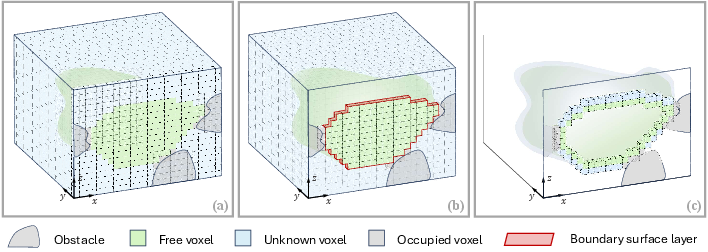
Figure 1: Depiction of the boundary surface layer and its explicit representation as a minimal subset in the proposed boundary map.
The boundary map thus acts as a compact encoding of the environment's occupancy, effectively reducing the memory footprint to near-quadratic scaling in typical scenes, even at high map resolutions.
Occupancy Query and Determination
For arbitrary query locations, the proposed system leverages the theory that occupancy state transitions occur only at boundary voxels. Determining the occupancy of a location q proceeds as follows:
- Direct boundary match: If q is itself a boundary voxel, its type directly yields its state.
- Directed nearest boundary search: Otherwise, in a pre-specified search direction, the nearest boundary voxel bnn is sought. If bnn is classified as interior, q is free; otherwise, if exterior, q is unknown. Occupied state is only assigned to boundary exterior (occupied) voxels at an exact match.
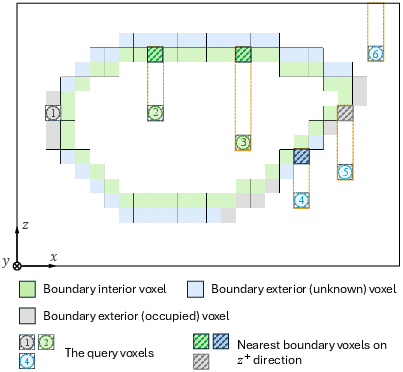
Figure 2: Occupancy state query logic, with directional search to the nearest boundary voxel dictating the state assignment for the query voxel.
This process supports average-case O(1) query time, a significant advancement over standard octree-based techniques which scale logarithmically with the environment's extent and resolution.
Data Structure: 2D Hash-based Grid for Boundary Voxels
To efficiently maintain the boundary voxel subset, the authors introduce a hash-based 2D grid, projecting all boundary voxels along a chosen axis (commonly z for ground robots or MAVs) onto the corresponding plane (e.g., (x,y) plane). Each grid cell contains a sorted array of the boundary voxels projected onto it, encoded in 32 bits: 30 for coordinate, 2 for voxel type. This structure achieves minimal memory overhead and enables rapid binary search along the projection axis.
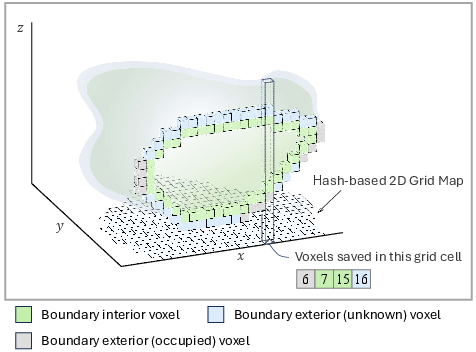
Figure 3: The boundary map as a 3D-to-2D projected hashgrid, achieving high spatial efficiency and fast access.
The choice of the projection axis mediates the trade-off between memory and query efficiency; best practices involve aligning this axis with the smallest environment dimension.
Global-Local Fusion: Real-Time Mapping Framework
For real-time robotic deployment, especially on resource-constrained platforms, the method is wrapped in a global-local mapping framework. The local map is a fixed-size, dense 3D occupancy grid centered on the robot for fast, high-frequency updates using probabilistic ray-casting. The global representation is the boundary map, responsible for all regions outside the robot-centric local map.
Local-global transitions exploit the boundary voxel rules during map sliding events (i.e., as the robot moves and the local map is shifted), incrementally promoting local occupancy changes to the boundary map and reconstructing local voxels from the boundary representation as necessary.
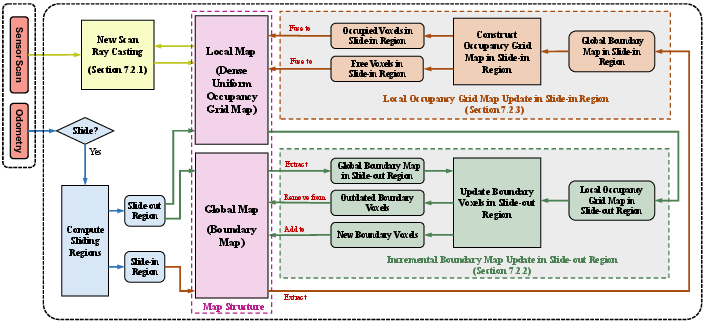
Figure 4: The global-local mapping framework, supporting efficient updates and queries by tightly coupling a high-resolution local grid with a low-memory global boundary map.
Empirical Evaluation: Benchmarks and Real-World Trials
Extensive benchmarking across urban (KITTI), campus (HKU), and Ford AV datasets, as well as private MAV sequences, validates the strengths of the proposed boundary map. Key findings include:
- Memory efficiency: The method achieves up to 91.7% reduction in memory consumption compared to state-of-the-art octree-based methods at 0.1 m resolution on kilometer-scale sequences. The benefits become pronounced with higher resolution and increased mapped volume.
- Query/update efficiency: Empirical query times are consistently O(1) and, at high scale/resolution, significantly outpace octree and hashgrid approaches, with up to a 10× query speedup demonstrated.
- Accuracy: Boundary map accuracy exceeded 99.9% (vs. Octomap) in static and highly dynamic settings; degradation due to log-odds/discrete state conversion was found to be negligible.
- Practical deployment: A real-world MAV navigation experiment in a multi-level building, with cumulative flight distances exceeding 1.25 km and environment scale of 277×123×19 m, showed the boundary map to be essential for long-range goal-reaching and robust local/global obstacle encoding under strict memory budgets.
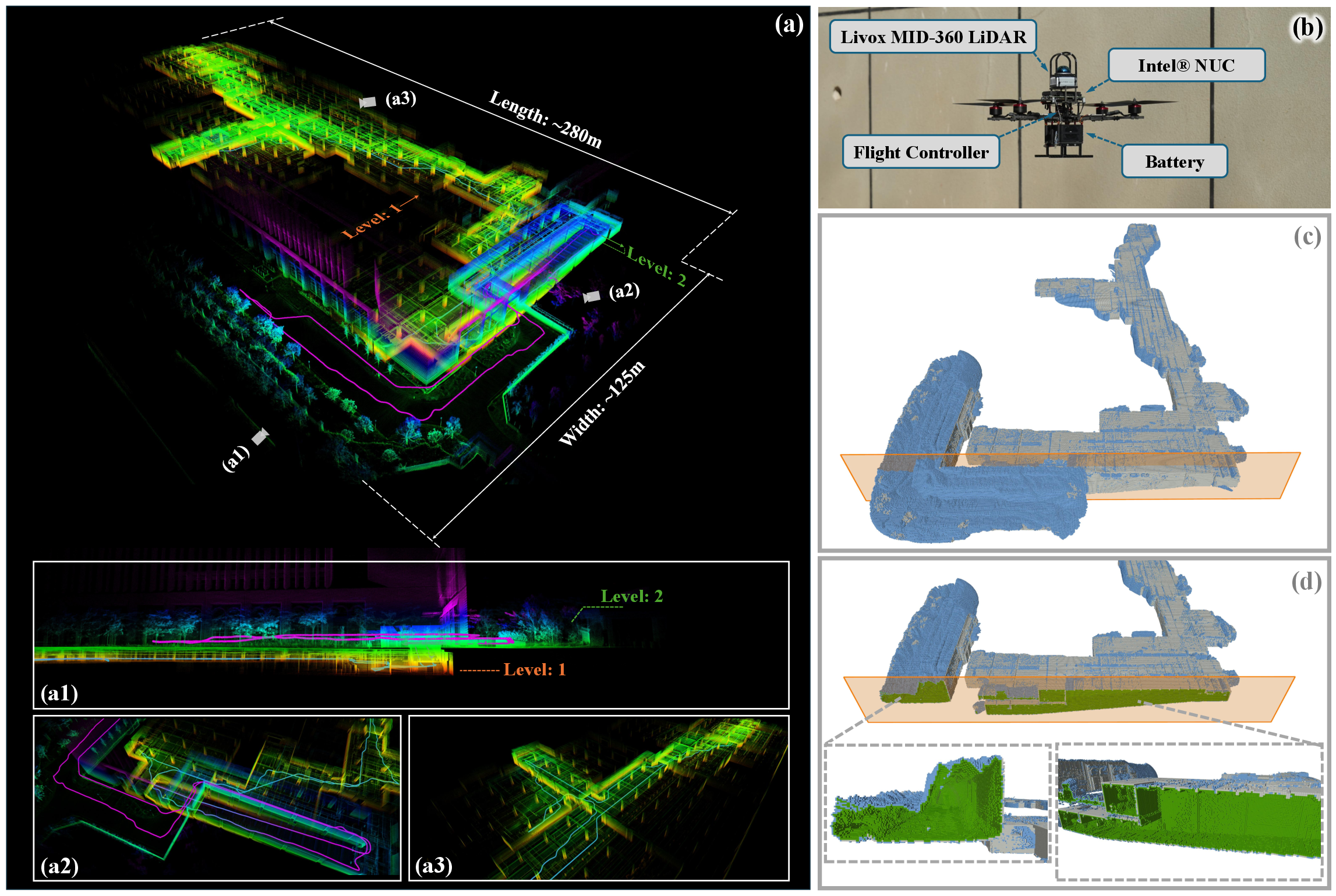
Figure 5: Long-range MAV navigation in a multi-level, unknown environment, demonstrating the closed boundary structures maintained by the proposed map and the hardware (MAV) setup.
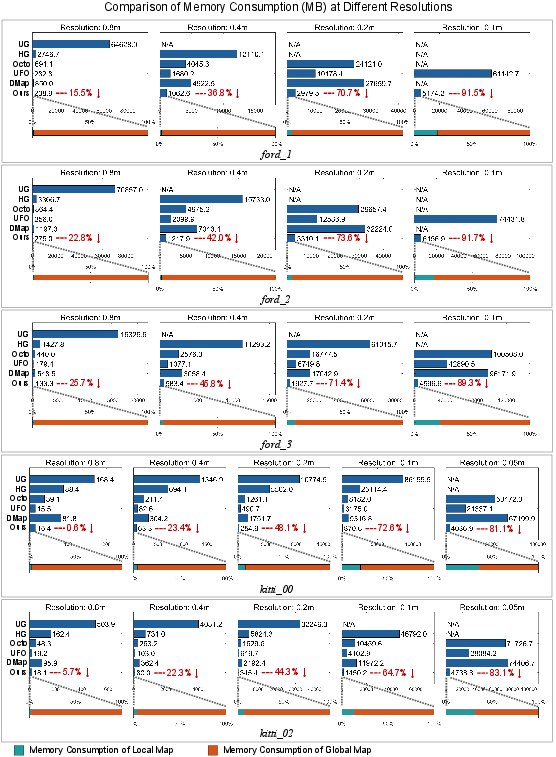
Figure 6: Comparative memory consumption of competing methods with significant reduction achieved by the boundary map approach.
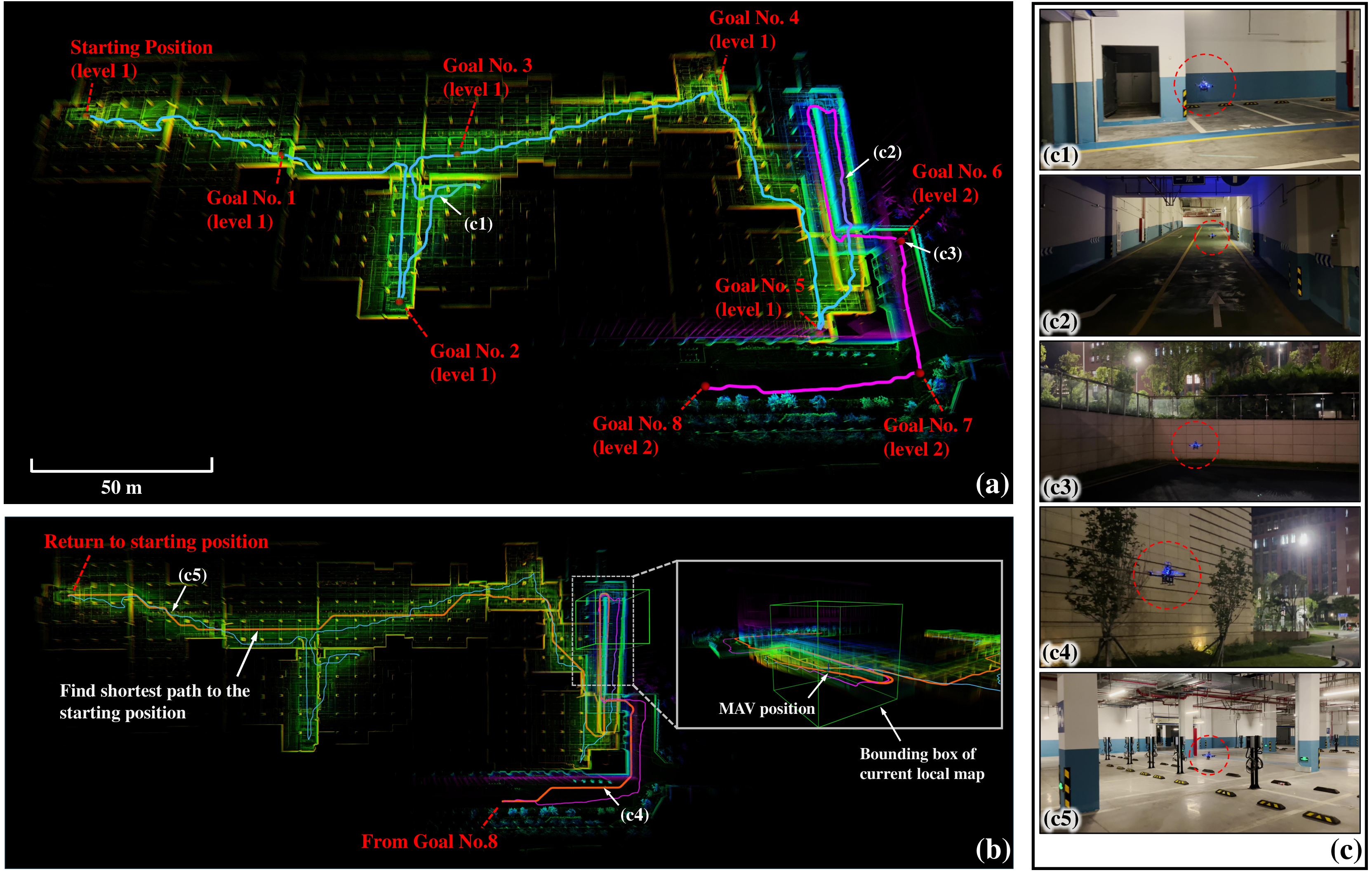
Figure 7: Executed long-range navigation sequence with roll-out to multiple goals and efficient planning over the global-local mapping structure.
Theoretical and Practical Implications
The boundary map representation fundamentally shifts the occupancy mapping efficiency envelope by decoupling update/query complexity from the volumetric size of the workspace. The approach is robust to noisy or dynamic environments, as demonstrated in mapping sequences with significant dynamic content (e.g., moving pedestrians, dust), due to its integration with established probabilistic ray-casting update logic.
The technique generalizes naturally to multi-agent systems, where compactness of boundary communication will be critical in bandwidth-limited distributed SLAM or cooperative mapping settings. In high-throughput SLAM stacks and real-time navigation pipelines for MAVs, mobile robots, and autonomous vehicles, the presented boundary map enables more frequent global planning and larger operational envelopes under fixed hardware constraints.
Limitations and Future Directions
While boundary-based encoding is highly efficient in practice for environments with substantial open/free regions, worst-case environments (e.g., highly convoluted free-space corridors) could lead to an increased number of boundary voxels. The conversion between log-odds probabilities and discrete states during global-local transitions can cause minor accuracy loss but is negligible in typical deployments. The current single-axis projection for the hash grid could be further improved with multi-axis or adaptive subspace partitioning for complex topologies.
Future research directions include boundary map fusion for distributed mapping (multi-robot data association and merge), dynamic adaptation of projection axes during operation, and integration with semantic mapping stacks and richer environmental representations.
Conclusion
This work makes a significant stride toward scalable, high-resolution, real-time occupancy mapping by encoding only the boundary voxels of the free/occupied volume in a memory-efficient data structure with constant-time query and update support. Comprehensive benchmarks and real-world deployment evidence practical impact. The paradigm enables more ambitious SLAM and autonomous navigation tasks in large and complex environments, and the theoretical underpinnings lay the groundwork for further efficiency gains in distributed and future AI-guided mapping systems.