Parallelised Differentiable Straightest Geodesics for 3D Meshes
Abstract: Machine learning has been progressively generalised to operate within non-Euclidean domains, but geometrically accurate methods for learning on surfaces are still falling behind. The lack of closed-form Riemannian operators, the non-differentiability of their discrete counterparts, and poor parallelisation capabilities have been the main obstacles to the development of the field on meshes. A principled framework to compute the exponential map on Riemannian surfaces discretised as meshes is straightest geodesics, which also allows to trace geodesics and parallel-transport vectors as a by-product. We provide a parallel GPU implementation and derive two different methods for differentiating through the straightest geodesics, one leveraging an extrinsic proxy function and one based upon a geodesic finite differences scheme. After proving our parallelisation performance and accuracy, we demonstrate how our differentiable exponential map can improve learning and optimisation pipelines on general geometries. In particular, to showcase the versatility of our method, we propose a new geodesic convolutional layer, a new flow matching method for learning on meshes, and a second-order optimiser that we apply to centroidal Voronoi tessellation. Our code, models, and pip-installable library (digeo) are available at: circle-group.github.io/research/DSG.
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What this paper is about (big picture)
Imagine you’re walking on the surface of a 3D shape (like a globe, a bunny statue, or a spaceship model). If you pick a starting point, a direction, and a step length, where will you end up if you walk “straight” along the surface? That “walk forward” operation is called the exponential map in geometry, and the path you follow is a geodesic (the straightest possible path on the surface).
This paper builds fast, accurate, and learnable tools to do exactly that on 3D meshes (shapes made of tiny triangles). It also shows how to run these tools on a GPU (so they’re very fast) and how to use them inside machine learning models that learn directly on surfaces.
What questions the paper asks
- How can we compute “walk straight on the surface” (the exponential map) on triangle meshes quickly and accurately?
- How can we make this operation differentiable so neural networks can learn from it (i.e., compute gradients)?
- Can we run many such calculations in parallel on a GPU?
- Can these tools improve practical tasks on 3D surfaces (like 3D CNNs, generative models on surfaces, or mesh optimization)?
How they did it (in plain language)
Geodesics on triangle meshes: “straightest” paths
On smooth shapes (like a perfect sphere), there are neat formulas for straight paths. But real 3D models are meshes made of flat triangles. On such meshes, “straight” is defined using the “straightest geodesics” rule: as your path passes from triangle to triangle, it keeps its direction in a way that best imitates going straight on a curved surface.
Think of laying the triangles flat like tiles as you walk; each time you step across an edge, you keep your heading consistent with how the surface bends.
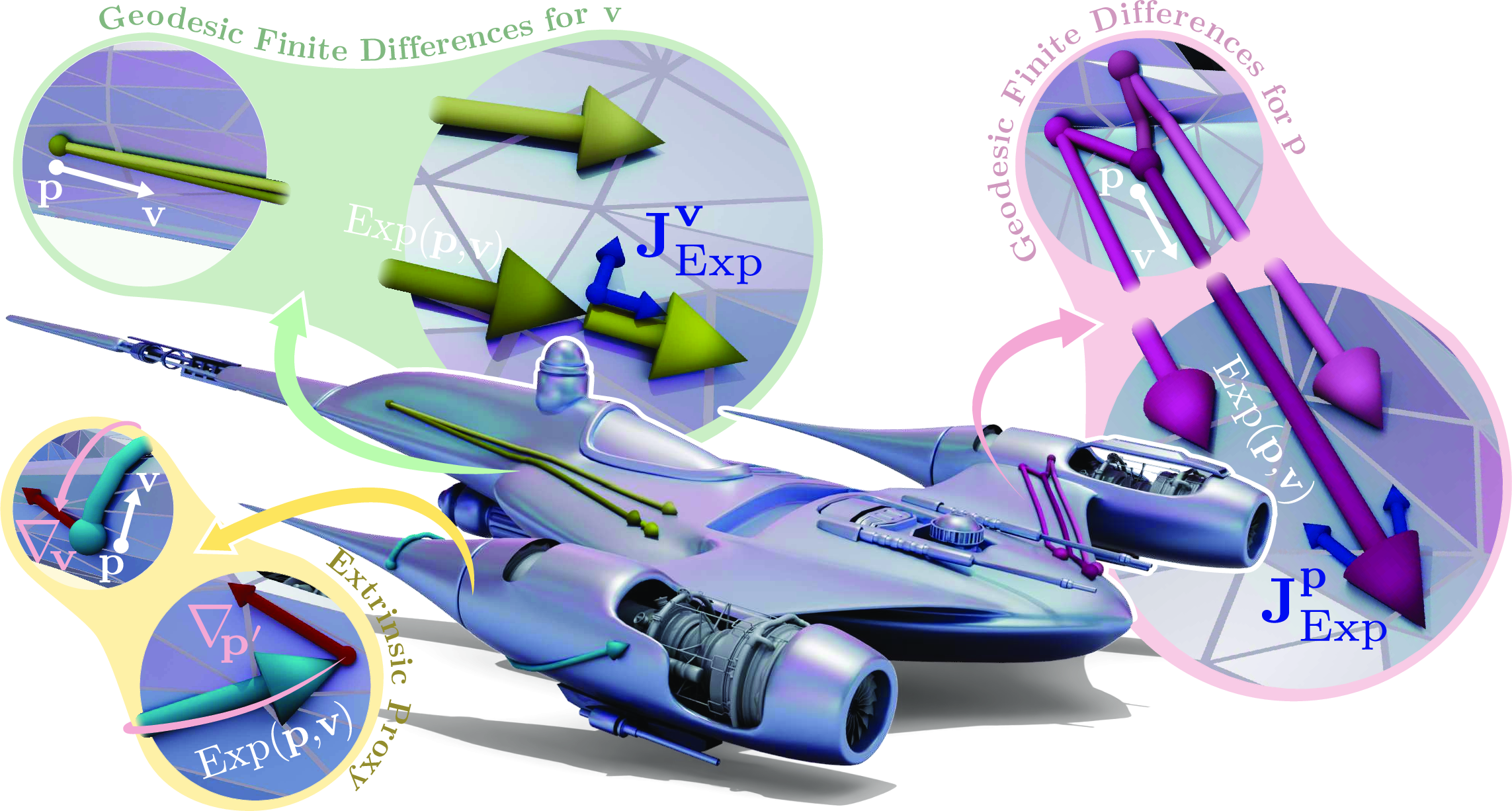
Making it differentiable: two tricks
Neural networks need gradients (how the output changes when you tweak the input). But on a mesh, paths can kink at triangle edges, which makes naive automatic differentiation break. The authors designed two practical ways to get usable gradients:
- Extrinsic Proxy (EP): an approximation that treats the movement a bit more like in normal 3D space, with a smart rotation that mimics how the surface turns. It gives very fast gradients that are especially good when you adjust the direction/length of your step. It’s less reliable if you change the starting point.
- Geodesic Finite Differences (GFD): a more accurate method that gently “nudges” the input (start point or direction) along the surface and sees where the endpoint moves, like tapping a joystick a tiny amount and measuring the result. It’s slower than EP but gives much better gradients for both starting position and direction.
Making it fast on GPUs
They parallelize the whole process. Each geodesic walk (from one point and direction) runs independently in a single GPU thread. That means they can trace tens of thousands of paths at once across one or many meshes. No complicated syncing needed—the GPU handles huge batches efficiently.
What they found and why it matters
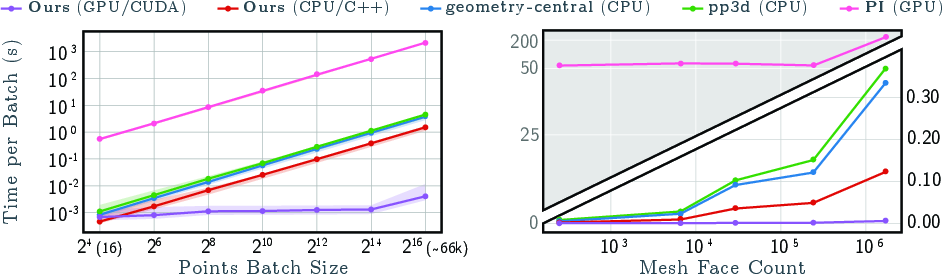
- Very fast and scalable: Their GPU version is orders of magnitude faster than existing tools, especially on large meshes or big batches.
- Accurate: The endpoints of paths match well with trusted methods and with exact math on simple shapes (like a sphere).
- Reliable gradients:
- GFD (the careful nudge method) matches exact gradients on a sphere and works well for learning when both starting point and direction matter.
- EP (the fast shortcut) gives good gradients when only the direction/length is being optimized, making it great for speed-sensitive tasks.
- A usable library: They release a PyTorch-ready, pip-installable library (“digeo”) with C++/CUDA backends, so researchers and developers can plug it into learning pipelines.
Cool applications they built with it
Using their differentiable geodesics, the authors showcase three examples:
- Adaptive Geodesic Convolutions (AGC): A 3D “convolution” layer for meshes that learns how big a neighborhood (patch) to look at on the surface, rather than using a fixed size. This helps the network adapt to local geometry and improves segmentation accuracy on human body meshes.
- MeshFlow (flow matching on meshes): A generative modeling method that learns how to move points over the surface to match a target distribution, using the exponential map directly (no off-surface drifting or slow ODE solvers). It’s faster, memory-efficient, and competitive or better on key metrics.
- Mesh-LBFGS optimizer: A second‑order optimizer tailored to meshes that benefits from accurate surface moves and gradients. They apply it to centroidal Voronoi tessellation (a way to evenly spread points on a surface) and show faster, better convergence.
Why this is important
So much modern data lives on curved surfaces: 3D scans, anatomical models, robot parts, molecules, Earth maps, and more. If our learning tools understand “surface geometry” properly—and do it fast—models can learn better patterns, make fewer errors, and run at practical speeds.
This work:
- Brings a core geometry operation (the exponential map) to meshes in a way that’s fast, differentiable, and easy to use.
- Opens the door to stronger, more flexible neural networks on surfaces.
- Provides a shared toolbox (the “digeo” library) that others can build on in graphics, vision, robotics, and scientific computing.
In short: it’s like giving machine learning a reliable “walk straight on the surface” button—complete with a good “reverse” (gradients)—and a turbo mode (GPU), so models can learn and optimize directly on real-world 3D shapes.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
Below is a single, consolidated list of unresolved issues that are either missing, uncertain, or left unexplored in the paper, written to be concrete and actionable for future work:
- Lack of theoretical error bounds: no formal analysis quantifies how far straightest-geodesic–based on piecewise-linear meshes deviates from true (shortest) Riemannian geodesics, nor how this impacts gradients and .
- Differentiability at discrete events: the straightest geodesic is piecewise linear and not at face/edge/vertex transitions; the paper does not provide a principled treatment (e.g., subgradients, smoothing, or event-aware autodiff) for these non-smooth points.
- Cut locus and non-uniqueness: behavior near the cut locus (where geodesics cease to be unique) is not addressed; how and its gradients are defined or stabilized in such regions remains open.
- EP’s biased gradient w.r.t. position: the Extrinsic Proxy (EP) zeros by design; a more accurate yet efficient surrogate that captures dependence on the start point is still missing.
- GFD step-size selection and stability: Geodesic Finite Differences (GFD) relies on fixed perturbations ; the paper does not study sensitivity, conditioning, or adaptive step-size schemes that trade off truncation error vs. numerical noise.
- Gradient validation beyond the sphere: gradient correctness is only validated against a closed-form sphere case; systematic evaluation (e.g., FD-based sanity checks) on general meshes with high curvature, anisotropy, or low quality triangulations is absent.
- Derivatives w.r.t. mesh geometry: no formulation is provided for (vertex positions), limiting use in shape/mesh optimization where geometry is a variable.
- Boundary and hole handling in backprop: the “trace-along-boundary” heuristic for small holes is introduced for the forward step, but how boundary events affect differentiability and gradient correctness is not analyzed.
- Robustness to mesh pathologies: there is no discussion of degenerate triangles, non-manifold edges, self-intersections, highly skewed/obtuse elements, or noisy/incorrect normals, and how these affect forward accuracy and backward stability.
- Reliance on extrinsic normals: both forward tracing and EP use face/vertex normals; the effects of normal estimation errors and strategies for robust normal computation (or intrinsic substitutes) are not explored.
- Parallel transport fidelity: the discrete parallel transport (angle-normalized) used as a surrogate for Levi-Civita transport lacks error analysis; holonomy effects and accumulated transport error are not quantified.
- GPU scalability limits: one-thread-per-geodesic induces warp divergence for heterogeneous path lengths; the paper does not quantify performance under heavy divergence, memory bandwidth limits, or peak VRAM consumption for very large batches/meshes.
- Determinism and reproducibility on GPU: potential nondeterminism from floating-point ordering or different hardware backends is not discussed; reproducible training/inference guarantees are unclear.
- Generalization beyond triangular manifold meshes: extension to non-manifold meshes, meshes with boundaries (beyond the heuristic), polygonal/quad meshes, implicit surfaces, or point clouds is not addressed.
- Support for non-Euclidean metrics on meshes: only the induced Euclidean (embedded) metric is considered; no mechanism to handle spatially varying or anisotropic intrinsic metrics common in geometry processing.
- Relation to shortest-path geodesics: straightest vs. locally shortest geodesics differ on meshes; the downstream impact of choosing straightest geodesics (for both forward and gradient quality) on learning tasks remains underexplored.
- No differentiable log map: while is addressed, a differentiable map (inverse) and its stability/accuracy on meshes are not provided, limiting algorithms that need both.
- Event scheduling in backward pass: the backward pass through sequences of face/edge/vertex crossings is not described (e.g., how to backprop through discrete event histories efficiently without large memory costs).
- Adaptive hybrid EP/GFD strategies: there is no method to switch between EP and GFD per-geodesic or per-iteration, e.g., using EP by default and selectively invoking GFD when -sensitivity or event proximity is detected.
- AGC dependence on tessellation: adaptive geodesic convolution is likely sensitive to mesh resolution and triangulation (remeshing), but tessellation-invariance or transfer across different discretizations is not investigated.
- AGC anisotropy and equivariance: filters learn radial scales (via ) but not general anisotropy; the impact on rotational equivariance and whether learned filters align with surface features consistently across meshes is unexplored.
- AGC stability of rotational invariance: rotational invariance is implemented via a max over rotated copies; the non-smooth max operation and its effect on gradient stability and training dynamics are not analyzed.
- MeshFlow expressiveness and invertibility: learning a stationary vector field and composing exponential steps may underfit time-dependent flows; invertibility, likelihood evaluation, and exact probability flow (as in CNFs) are not supported.
- OT cost surrogate mismatch: MeshFlow uses biharmonic distance as a surrogate for geodesic distance to build couplings; the bias this introduces (vs. true geodesic OT) and its effect on learning outcomes is not quantified.
- MeshFlow multimodality and topology: it is unclear how well a stationary field with small handles highly multimodal targets or transports across complex topology (e.g., around handles) without large or time dependence.
- MeshFlow evaluation metrics: negative log-likelihoods are noted as not directly comparable to RFM; a consistent, likelihood-free evaluation protocol on meshes is missing.
- Riemannian L-BFGS details: the proposed “Mesh-LBFGS” optimizer is not theoretically analyzed; how curvature, line-search conditions, and the discrete connection affect convergence guarantees on meshes is not discussed.
- Memory/computation trade-offs in backward: GFD requires multiple additional evaluations per sample; the paper does not profile end-to-end training costs or propose caching/adjoint strategies to reduce overhead.
- Fairness of speed comparisons: the main baseline (geometry-central/potpourri3D) is CPU-based; comparisons to GPU-accelerated or batched geodesic solvers (if any) are not presented, leaving absolute speedups uncertain.
- Benchmarks near high curvature and vertices: no dedicated stress tests quantify accuracy and gradient stability for paths that cross many vertices, pass near cone-like singularities (angle deficits/excess), or traverse highly curved regions.
- Handling of long geodesics and wrap-around: behavior for very large (multiple windings, revisiting neighborhoods) is not characterized; step limits and failure modes for long traces are not examined.
- API for VJP-only backprop: modern DL frameworks require vector-Jacobian products rather than full Jacobians; the paper does not describe a VJP implementation, memory footprint, or how to integrate efficiently with autograd engines.
Practical Applications
Overview
This paper introduces a GPU-parallel, differentiable implementation of the exponential map, straightest geodesic tracing, and parallel transport on triangular meshes, together with two backpropagation schemes—Extrinsic Proxy (EP, faster) and Geodesic Finite Differences (GFD, more accurate). It provides a pip-installable PyTorch-compatible library (digeo) and demonstrates three exemplars: Adaptive Geodesic Convolutions (AGC), MeshFlow (a flow-matching-inspired generative method on meshes), and a mesh L-BFGS optimizer for centroidal Voronoi tessellation (CVT). Below are concrete, real-world applications, grouped by deployment readiness.
Immediate Applications
These can be deployed now using the provided codebase/libraries with standard GPU hardware and PyTorch workflows.
- Software/3D graphics and VFX (content creation pipelines)
- What: Drop-in geodesic/parallel-transport operators for mesh tools (selection brushes with geodesic radius, geodesic inpainting, vector-field–aware procedural texturing, orientation-preserving transfers).
- How: Integrate digeo CUDA kernels into DCC plugins (Blender, Maya), game engines (Unreal/Unity), or offline pipelines.
- EP vs GFD: EP for fast norm-only tuning (brush radius, deformation magnitude); GFD when positions and topologies are optimized.
- Assumptions/dependencies: Reasonably well-formed manifold meshes; consistent normals; CUDA-capable GPU; PyTorch/C++ integration.
- Real-time mesh-aware learning for segmentation/classification (software, media, robotics)
- What: Use Adaptive Geodesic Convolutions (AGC) to learn receptive-field sizes per layer/channel, improving mesh-based tasks (surface part segmentation, classification, correspondence).
- How: Swap in AGC layers for fixed-patch geodesic CNNs or as a complement to DiffusionNet.
- EP vs GFD: EP suffices when learning only radial extents; GFD for end-to-end learning including spatial parameters.
- Assumptions/dependencies: Training datasets with surface meshes; stable mesh resolution; GPU memory budget tuned for GFD vs EP.
- Mesh remeshing, sampling, and fairing (manufacturing, CAD/CAM, 3D printing)
- What: Use Mesh-LBFGS and CVT to generate high-quality, nearly centroidal meshes for simulation, robust manufacturing toolpaths, and slicing.
- How: Integrate into CAD preprocessors, 3D printing slicers, or meshing pipelines for FEA/CFD.
- EP vs GFD: GFD preferred for accurate optimization on positional variables; EP adequate for speed-sensitive inner loops with norm-only updates.
- Assumptions/dependencies: Convergent optimization requires proper step sizes and robust mesh connectivity; boundary/holes handled via provided boundary-tracing option.
- Robotics: surface-following path planning and inspection on triangulated assets (infrastructure, energy, manufacturing)
- What: Compute straightest-geodesic motion primitives over asset meshes (tanks, blades, hulls) and parallel-transport tool orientations.
- How: ROS node or embedded library calling digeo to plan on surface meshes built from scans; use for spray-painting, CUI inspection, cleaning.
- EP vs GFD: EP for fast local updates (e.g., robot tool orientation preservation along a path); GFD for planning that optimizes locations.
- Assumptions/dependencies: Accurate environment meshes; latency budget compatible with CUDA; surface-only motion acceptable (no volumetric obstacles).
- GIS/geoscience: surface neighborhoods on terrain meshes (environmental mapping, geomorphology)
- What: Fast geodesic neighborhoods, geodesic buffers, and vector-field transport on triangulated terrains for classification/segmentation.
- How: QGIS/ArcGIS plugins or server-side geoprocessing using digeo to compute surface buffers and surface-based aggregations.
- EP vs GFD: EP for quick neighborhood radii; GFD for accurate backprop in learning pipelines over terrains.
- Assumptions/dependencies: Terrain meshing quality; unit and scale consistency; GPU availability for batch queries.
- Medical imaging and computational anatomy (healthcare)
- What: AGC for surface-based learning on anatomical meshes (cortical parcellation, organ surface segmentation); parallel transport for vector fields on anatomy.
- How: Integrate into 3D Slicer/FreeSurfer toolchains; train mesh CNNs on cortical/organ surfaces with learned patch sizes.
- EP vs GFD: GFD recommended for stable gradient flow through positions; EP suitable for speed when only receptive field sizes change.
- Assumptions/dependencies: High-quality anatomical surface meshes; regulatory constraints for clinical deployment; GPU compute.
- Generative modeling and surface transfer (software/media)
- What: MeshFlow for fast, low-step generative transport on surfaces (texture/style density transfer, point distribution synthesis).
- How: Use OT-based pairing and K-step exponential maps to synthesize or transfer patterns on characters/assets; fewer steps and memory vs ODE-based RFM.
- EP vs GFD: GFD needed (positions move during training); inference uses forward exp only.
- Assumptions/dependencies: Biharmonic distance as surrogate for geodesics; OT pairing quality influences results; training stability of MLP vector fields.
- Digital twins and AR overlays (AEC, maintenance)
- What: Geodesic-aware measurement, annotation, and overlay on as-built meshes; consistent on-surface vector fields for flow directions.
- How: Embed digeo into twin viewers to compute geodesic distances and orientations for inspection tagging and overlays.
- EP vs GFD: EP sufficient for interactivity; GFD for optimizing annotations/placements algorithmically.
- Assumptions/dependencies: Real-time GPU; mesh fidelity; robust normals.
- Education and outreach (academia)
- What: Interactive labs for Riemannian geometry on meshes: visualize exponential maps, geodesics, and parallel transport in notebooks.
- How: Use digeo in teaching modules; pair with 3D viewers to explore geodesic behavior on different surfaces.
- EP vs GFD: Either; GFD illustrates gradient behavior; EP shows speed/approximation trade-offs.
- Assumptions/dependencies: Students’ access to CUDA GPUs optional (small meshes run on CPU/C++ backend).
- Tooling/products/workflows likely to emerge
- Geodesic-aware mesh editing brushes and filters in DCC tools.
- A PyTorch layer package for AGC; ROS surface-planning toolkit; QGIS terrain geodesic toolkit; 3D Slicer plugin for cortical analysis.
- Batch geodesic services (microservices) for large-scale asset pipelines.
Long-Term Applications
These require further research, productization, scaling, or integration with other systems.
- End-to-end geodesic-aware robot control and coverage planning (robotics, energy)
- What: Full-stack controllers that plan/execute on-surface trajectories with parallel-transported tool frames and optimize coverage or quality metrics.
- Research needs: Integration with multi-contact dynamics; uncertainty-aware planning; streaming mesh updates from SLAM.
- Large-scale Riemannian learning on geophysical meshes (climate, Earth systems)
- What: Geodesic convolution and MeshFlow on global/spherical/icosahedral meshes for weather/ocean modeling and transport on Earth’s surface.
- Research needs: Scalability to tens of millions of faces; coupling with PDE solvers; stability and generalization on real-world data.
- Medical digital twins on surfaces (healthcare)
- What: Patient-specific surface models with geodesic-aware learning for disease progression, surgical planning on organ surfaces, on-surface drug diffusion modeling.
- Research needs: Regulatory validation; integration with multi-modality data; robust handling of anatomical mesh variability and non-manifold regions.
- Geodesic-aware 3D generative AI (media, AR/VR, design)
- What: Controllable surface-native generative models (textures, fiber orientations, microstructures) on complex topologies using K-step exponential flows.
- Research needs: Training stability for large assets; bridging to differentiable rendering; constraints (e.g., material/UV consistency).
- SLAM and scene understanding with surface constraints (autonomy, AR)
- What: Geodesic operators inside SLAM and perception pipelines to enforce on-surface consistency (e.g., draping trajectories on reconstructed meshes).
- Research needs: Real-time fusion with volumetric methods; resilience to mesh artifacts; cross-sensor synchronization.
- Advanced parameterization and registration with second-order optimizers (CAD/CAE, biomedical)
- What: Differentiable optimization of parameterizations, surface fairing, and nonrigid registration using Mesh-LBFGS for faster convergence on complex energies.
- Research needs: Robustness to high curvature and poor conditioning; integration with constraints (landmarks, boundary conditions).
- Autonomous fabrication on curved surfaces (manufacturing)
- What: Path planning and extrusion bead orientation control on complex shells (composites, large-scale AM) via parallel transport and geodesic primitives.
- Research needs: Coupling with machine kinematics and process constraints; online adaptation to as-built deviations.
- Standards and policy (cross-sector)
- What: Reference implementations and benchmarks for differentiable mesh geometry; best-practice guides for 3D assets used in public procurement/digital twins.
- Research needs: Community consensus on benchmarks; validation datasets; sustainability assessments (GPU energy vs CPU solvers).
- Cross-representation geometry stacks (graphics/ML)
- What: Unified differentiable Riemannian operators spanning meshes, point clouds, and implicit surfaces for flexible pipelines.
- Research needs: Stable conversions; error-bounded approximations; extension of straightest geodesics to hybrid or dynamic representations.
Notes on Assumptions and Dependencies
- Mesh quality and manifoldness: Accuracy and stability improve with well-shaped, manifold meshes; degeneracies (thin triangles, nonmanifold edges) can degrade results.
- Boundary handling: The method offers an option to trace along boundaries/holes, but persistent defects can affect downstream learning/optimization.
- Differentiation trade-offs: EP is fast and reliable for gradients w.r.t. vector norms but unsuitable for position gradients; GFD is accurate but slower and requires ε tuning.
- Hardware/software stack: Best performance requires CUDA-capable GPUs; C++/CUDA/PyTorch integration is provided via digeo; CPU/C++ backends exist but are slower.
- Geometry reliance: Extrinsic normals and local frames are used; incorrect normals can misguide parallel transport; ensure consistent normal orientation.
- Surrogate distances: MeshFlow uses biharmonic distance as a surrogate for geodesic distance; efficacy depends on shape and resolution; OT matching quality matters.
- Scalability: While GPU kernels scale to large batches/faces, extreme-scale (multi-100M face) deployments may need multi-GPU/distributed adaptations.
- Domain constraints: Safety-critical and clinical applications need validation, interpretability, and compliance workflows beyond the scope of the library.
These applications leverage the paper’s core contributions: a fast, differentiable exponential map on meshes; parallel transport; GPU-parallel geodesic tracing; and integration-ready software (digeo) enabling Riemannian operators inside modern learning and optimization pipelines.
Glossary
- Adaptive Geodesic Convolutions (AGC): A learnable convolutional operation on meshes that adapts its patch (receptive field) size per channel/layer. "Adaptive Geodesic Convolutions (AGC) that learn their patch size for each channel and layer."
- Barycentric coordinates: Coordinates expressing a point inside a triangle as a convex combination of its vertices. "b = [b_u, b_v, b_w]T its barycentric coordinates on f."
- Biharmonic distance: A smooth, geometry-aware distance on meshes based on the biharmonic operator, used as a surrogate for geodesic distance. "The transport cost is defined as the squared biharmonic distance \cite{biharmonic}, which serves as a computationally efficient surrogate for the true geodesic distance."
- Boundary Value Problem (BVP): A problem where differential equations are solved subject to constraints at multiple points (e.g., endpoints), often used for shortest-path geodesics. "Numerous existing works on geodesics has focused on solving the Boundary Value Problem (BVP) to compute the shortest paths between two points on a discrete surface"
- Centroidal Voronoi tessellation: A partition of a domain where each region’s generator coincides with its centroid; used for mesh optimisation and sampling. "and a second-order optimiser that we apply to centroidal Voronoi tessellation."
- Closed-form solutions: Analytic expressions that can be evaluated directly without numerical approximation. "While closed-form solutions of the exponential map exist for simple canonical shapes like spheres~\cite{lee2006riemannian},"
- Covariant derivative: A derivative that accounts for manifold curvature, enabling comparison of vectors in different tangent spaces. "This can be achieved with the Covariant derivative, which is usually computed using the metric preserving and torsion-free Levi-Civita connection"
- CUDA: NVIDIA’s parallel computing platform and API for programming GPUs. "A PyTorch-compatible software library featuring C++ CUDA kernels that enables seamless integration of discrete Riemannian geometry into modern learning pipelines for meshes."
- Exponential map: The map that takes a tangent vector at a point to the end-point of the geodesic generated by that vector after unit time (or given length). "The exponential map ${Exp_p: \rightarrow M$ is the map that computes the end-point of the geodesic obtained by solving the IVP."
- Extrinsic Proxy (EP): A differentiable surrogate approach that emulates geodesic tracing using ambient Euclidean operations plus fixed rotations/translations. "Our GPU-parallelised schemes to differentiate the Exponential map and improve learning and optimisation on meshes: the Extrinsic Proxy (EP) and Geodesic Finite Differences (GFD)."
- Geodesic: A curve on a manifold that is locally straight (and, in smooth settings, also locally shortest), generalising straight lines to curved spaces. "is a geodesic on a smooth Riemannian surface when it can be simultaneously characterised as being the shortest and straightest."
- Geodesic Convolutional Neural Networks (GCNN): Neural networks that define convolution using geodesic distances on manifolds instead of Euclidean distances. "Geodesic Convolutional Neural Networks (GCNN) \cite{gcnn} extend the convolution operation to manifolds"
- Geodesic Finite Differences (GFD): A differentiation scheme using finite differences adapted to manifold geometry and geodesic paths. "Our GPU-parallelised schemes to differentiate the Exponential map and improve learning and optimisation on meshes: the Extrinsic Proxy (EP) and Geodesic Finite Differences (GFD)."
- Heat Kernel Signature (HKS): A multi-scale intrinsic shape descriptor derived from heat diffusion on a surface. "Like in DiffusionNet~\cite{diffusionnet}, we considered two possible input types: the raw 3D coordinates of the vertices, and the Heat Kernel Signature (HKS)~\cite{hks}."
- Initial Value Problem (IVP): Solving differential equations given initial conditions at a single point (e.g., point and velocity for geodesics). "This amounts to solving the initial value problem (IVP) represented by the following second order system of ordinary differential equations:"
- Jacobian: The matrix of first-order partial derivatives describing local linearisation of a vector-valued function. "Indicating with the Jacobian matrix"
- Laplace Beltrami Operator: The intrinsic Laplacian on a manifold, used for diffusion-based processing like heat kernels. "a side effect of using the Laplace Beltrami Operator to diffuse heat."
- LBFGS: A limited-memory quasi-Newton optimisation algorithm suitable for large-scale problems. "a second order LBFGS-based~\cite{rbfgs1, rlbfgs-imp} Riemannian optimiser for 3D meshes"
- Levi-Civita connection: The unique metric-compatible, torsion-free connection that defines parallel transport and covariant derivatives on Riemannian manifolds. "the metric preserving and torsion-free Levi-Civita connection"
- Logarithm map: The inverse (where defined) of the exponential map, mapping a nearby point back to a tangent vector at a base point. "The inverse of the exponential map is called logarithm map and is defined over a neighbourhood of "
- Moore–Penrose inverse: The pseudoinverse of a matrix used for least-squares projections, especially for non-square matrices. "pseudoinverse (MooreâPenrose inverse) $#1{M}^\dagger = (#1{M}^T#1{M})^{-1}#1{M}^T$."
- Optimal transport (OT): A framework for matching distributions by minimising transport cost; used here for point correspondences on meshes. "pointwise correspondences obtained via optimal transport (OT)."
- Parallel transport: The operation of moving a vector along a curve on a manifold while keeping it “parallel” according to the connection. "As previously mentioned, the Levi-Civita connection provides a rule for comparing tangent vectors at different points, thereby defining the notion of parallel transport."
- Projection Integration (PI): A baseline method that integrates steps in ambient space with projections back to the surface. "The projection integration (PI) we reproduced from~\cite{Madan2025local-parameterizations} exhibits similar accuracy to ours"
- Riemannian Flow Matching (RFM): A generalisation of flow matching to manifolds by learning time-dependent tangent vector fields and moving points geodesically. "Riemannian flow matching (RFM)~\cite{riemannian-fm} generalises this framework to Riemannian manifolds"
- Riemannian geometry: The study of curved spaces equipped with smoothly varying inner products on tangent spaces. "They all have fundamental properties that can be modelled through Riemannian geometry."
- Riemannian manifold: A smooth manifold equipped with an inner product on tangent spaces, enabling geometric notions like distance and curvature. "Let be a Riemannian manifold embedded in 3D Euclidean space"
- SE(3): The group of 3D rigid-body motions (rotations and translations). "like on ~\cite{yu2025nrmf, he2024nrdf}, ~\cite{bose2023se}, or the sphere~\cite{mathieu2020riemannian, riemannian-fm}."
- SO(3): The group of 3D rotations (special orthogonal group in 3D). "like on ~\cite{yu2025nrmf, he2024nrdf}, ~\cite{bose2023se}, or the sphere~\cite{mathieu2020riemannian, riemannian-fm}."
- Straightest geodesics: A discrete geodesic notion on meshes that preserves angles when crossing faces/vertices, used to trace geodesics and compute Exp. "the straightest geodesics method introduced in~\cite{polthier2006straightestgeod} is the de-facto choice for computing the exponential map and geodesic tracing on triangular meshes."
- Tangent bundle: The collection of all tangent spaces of a manifold, i.e., all point–vector pairs. "the tangent bundle set encompassing the tangent spaces of all points on ."
- Torsion-free: A property of a connection where parallel transport is path-symmetric; the Levi-Civita connection is torsion-free. "torsion-free Levi-Civita connection"
Collections
Sign up for free to add this paper to one or more collections.