Contact-Anchored Proprioceptive Odometry for Quadruped Robots
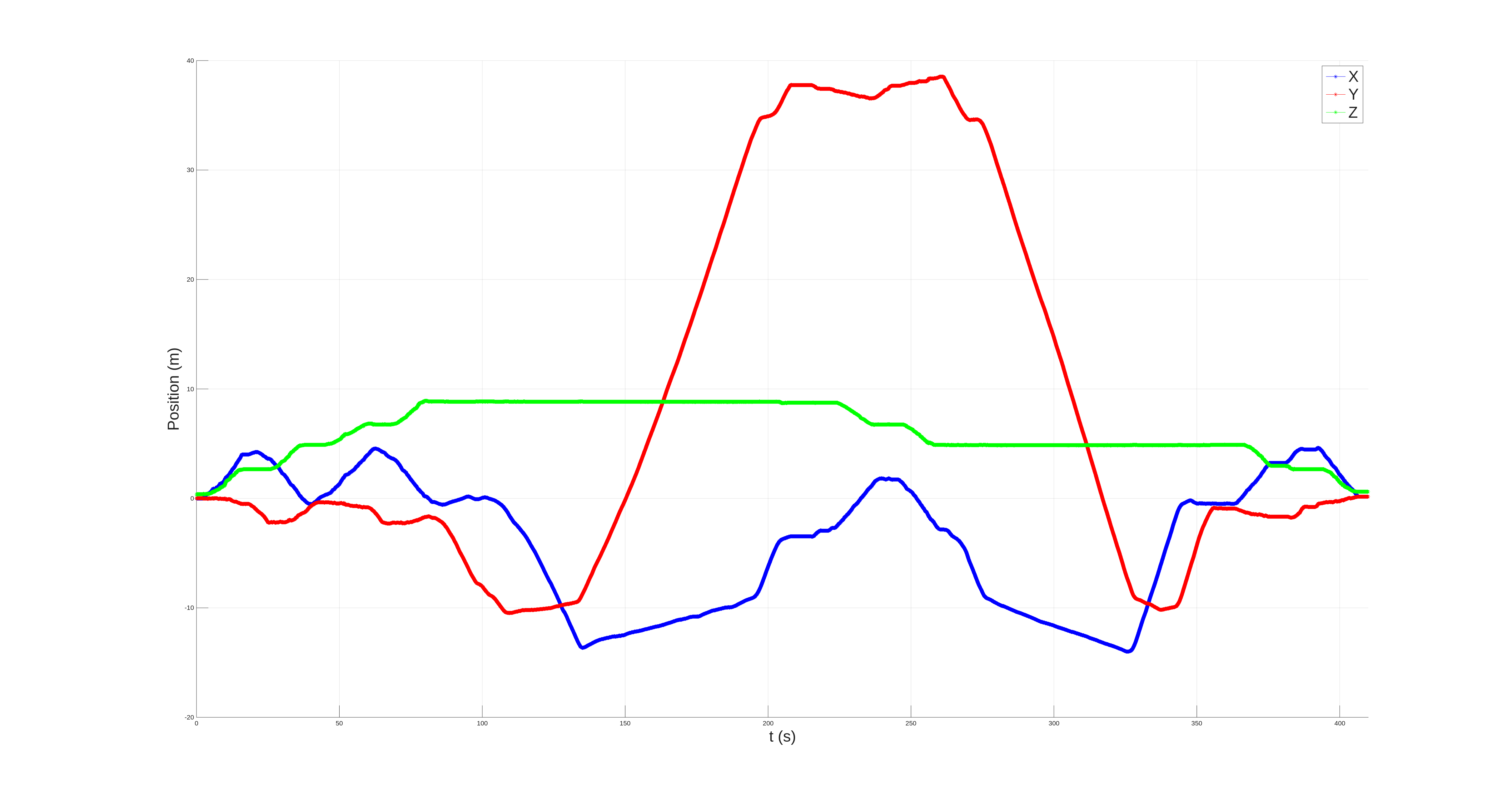
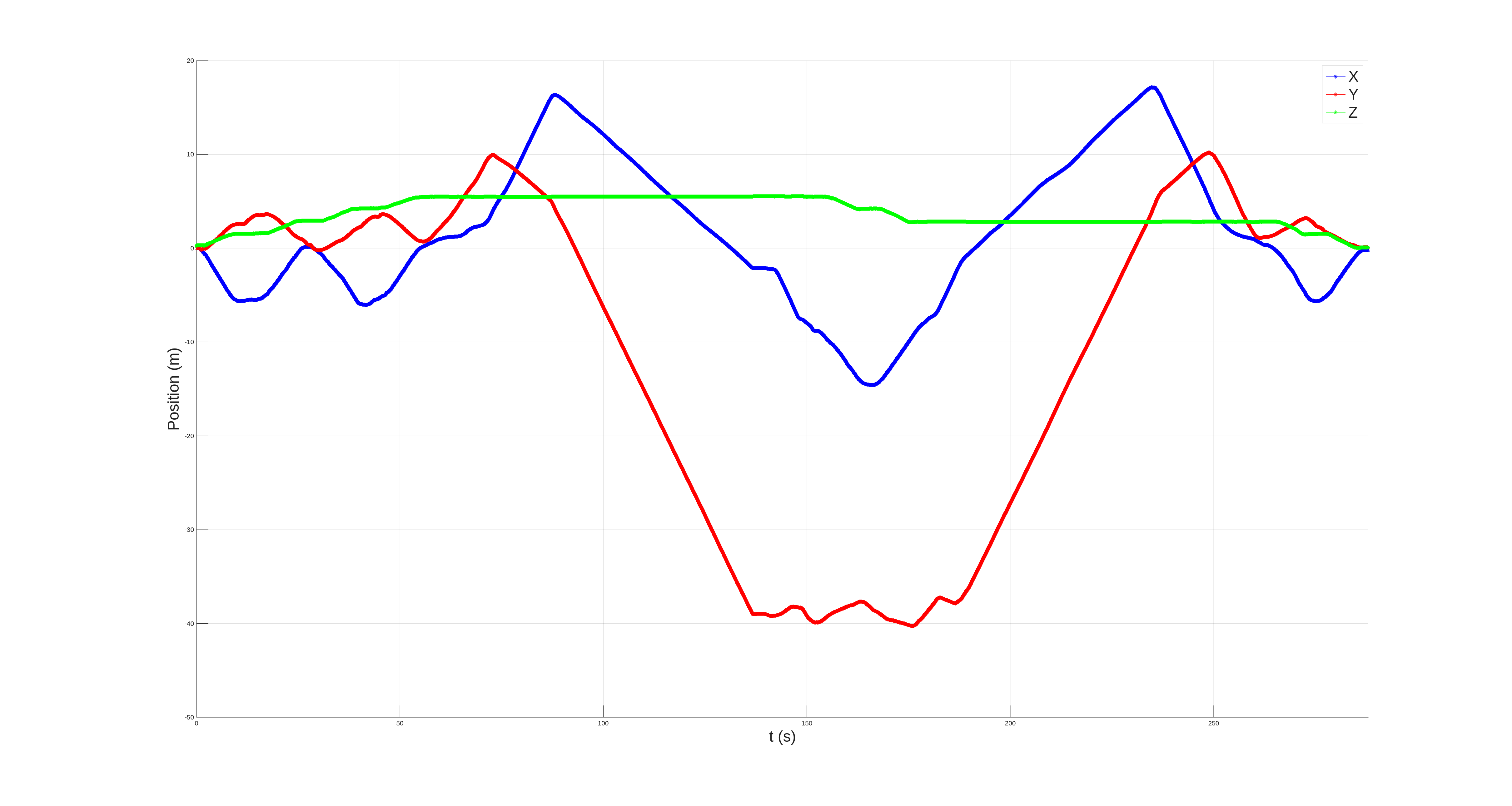
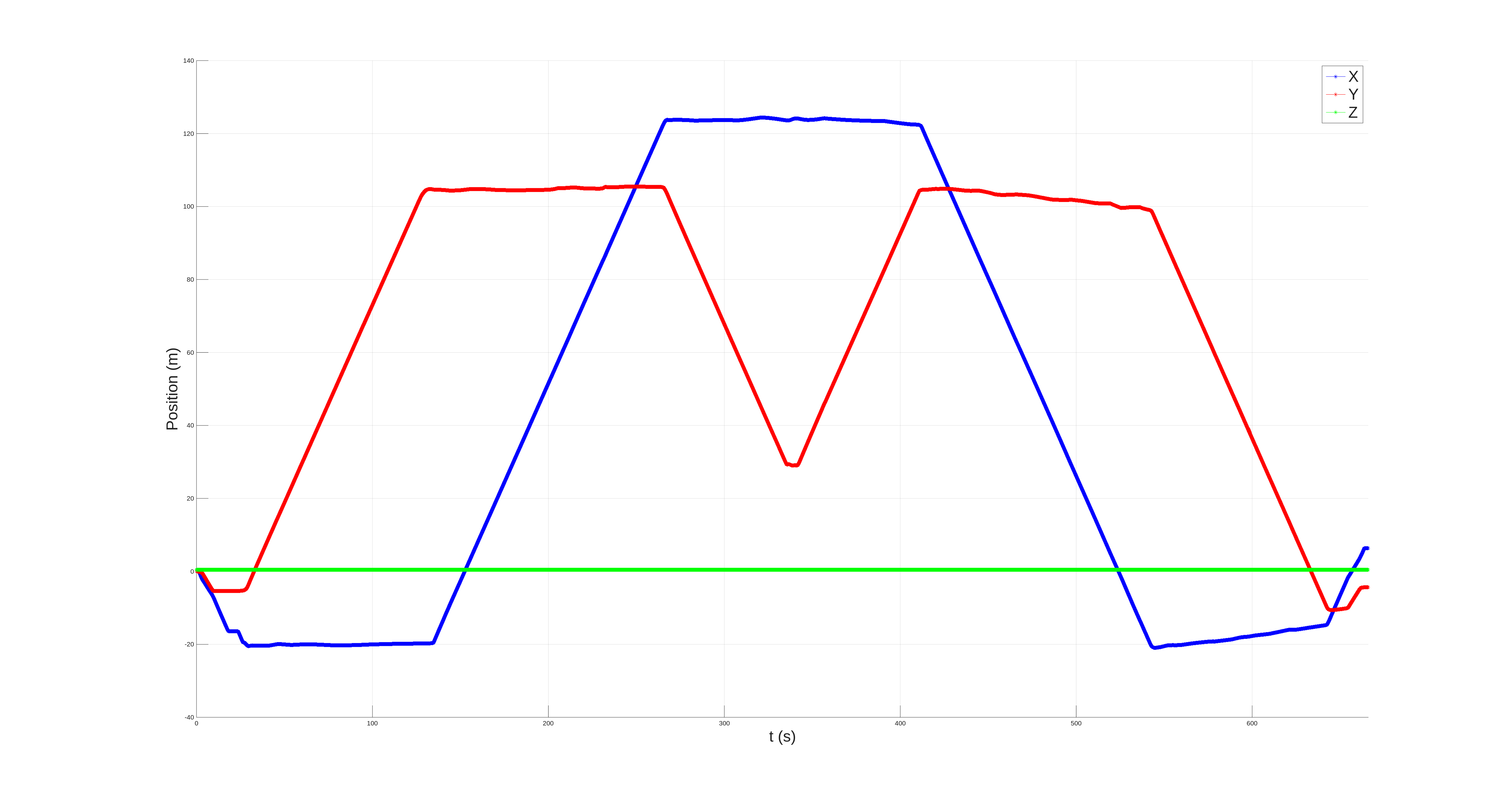
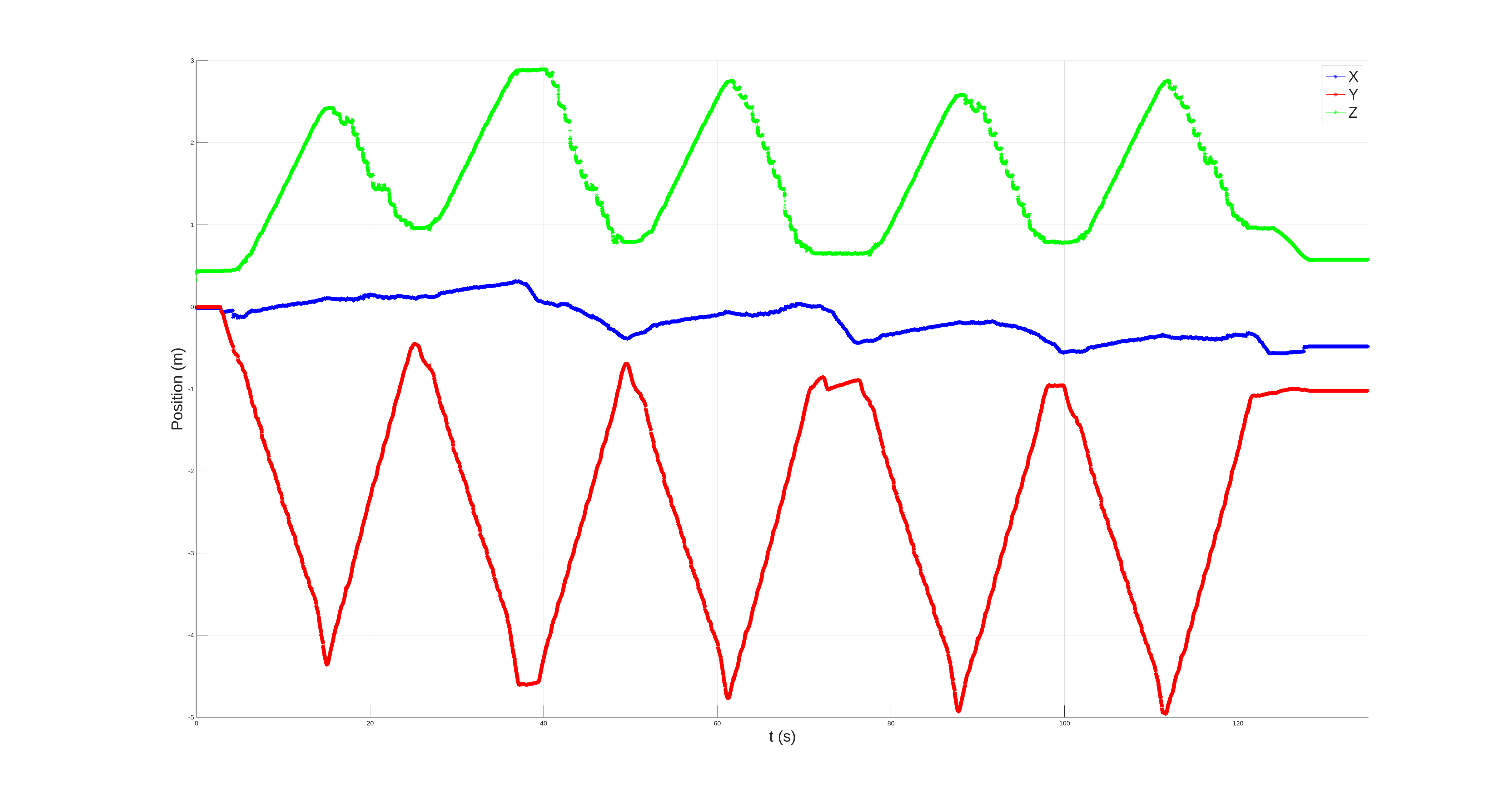
Abstract: Reliable odometry for legged robots without cameras or LiDAR remains challenging due to IMU drift and noisy joint velocity sensing. This paper presents a purely proprioceptive state estimator that uses only IMU and motor measurements to jointly estimate body pose and velocity, with a unified formulation applicable to biped, quadruped, and wheel-legged robots. The key idea is to treat each contacting leg as a kinematic anchor: joint-torque--based foot wrench estimation selects reliable contacts, and the corresponding footfall positions provide intermittent world-frame constraints that suppress long-term drift. To prevent elevation drift during extended traversal, we introduce a lightweight height clustering and time-decay correction that snaps newly recorded footfall heights to previously observed support planes. To improve foot velocity observations under encoder quantization, we apply an inverse-kinematics cubature Kalman filter that directly filters foot-end velocities from joint angles and velocities. The implementation further mitigates yaw drift through multi-contact geometric consistency and degrades gracefully to a kinematics-derived heading reference when IMU yaw constraints are unavailable or unreliable. We evaluate the method on four quadruped platforms (three Astrall robots and a Unitree Go2 EDU) using closed-loop trajectories. On Astrall point-foot robot~A, a $\sim$200\,m horizontal loop and a $\sim$15\,m vertical loop return with 0.1638\,m and 0.219\,m error, respectively; on wheel-legged robot~B, the corresponding errors are 0.2264\,m and 0.199\,m. On wheel-legged robot~C, a $\sim$700\,m horizontal loop yields 7.68\,m error and a $\sim$20\,m vertical loop yields 0.540\,m error. Unitree Go2 EDU closes a $\sim$120\,m horizontal loop with 2.2138\,m error and a $\sim$8\,m vertical loop with less than 0.1\,m vertical error. github.com/ShineMinxing/Ros2Go2Estimator.git
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
What is this paper about?
This paper is about helping legged robots (like four-legged “quadrupeds,” two-legged “bipeds,” and robots with wheels on their legs) keep track of where they are and how they’re moving without using cameras or lasers. Instead, the robot “feels” its own motion using internal sensors. The authors propose a new way—called contact-anchored proprioceptive odometry—to estimate a robot’s position and speed using only its built‑in motion sensors and motor measurements.
What questions did the researchers ask?
- Can a legged robot accurately figure out its position and speed without any camera or LiDAR, even over long distances and uneven terrain?
- How can we reduce common errors like drift (slowly wandering away from the true position) when using only internal sensors?
- Can one unified method work across different robot types (bipeds, quadrupeds, and wheel‑legged robots)?
- How do we make the robot’s “heading” (its compass-like direction, called yaw) stay stable over time?
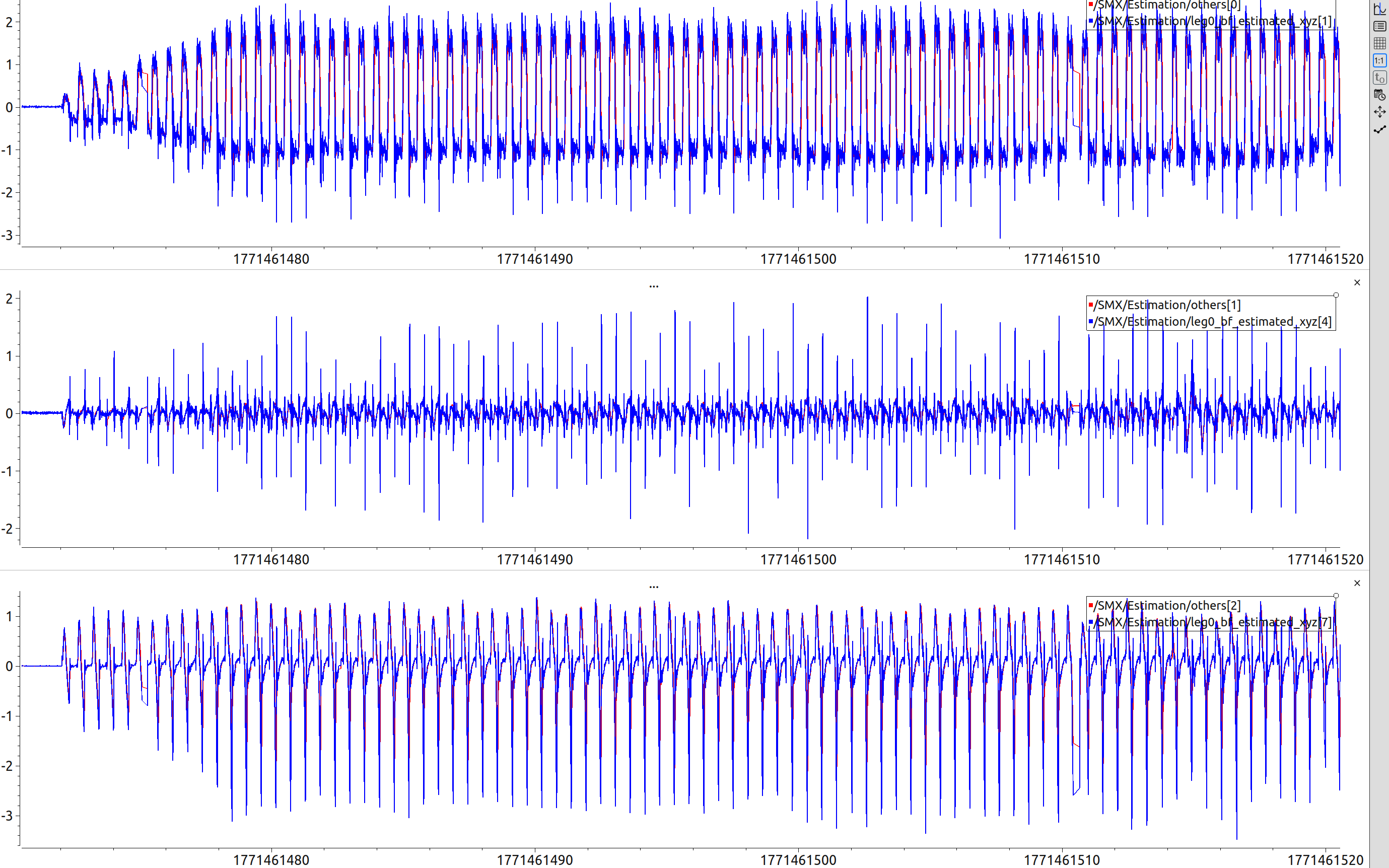
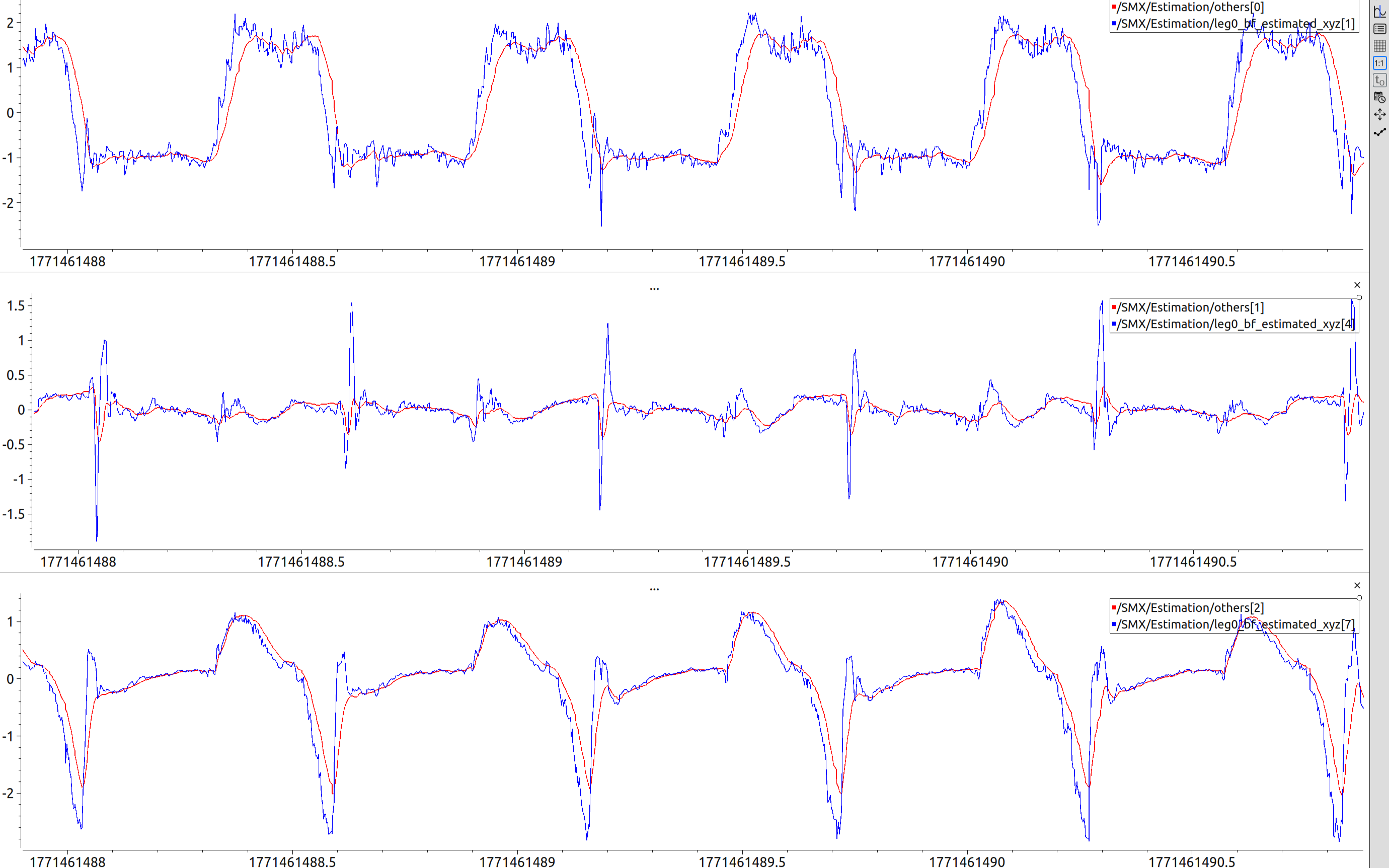
- How can we clean up noisy measurements from motor sensors, especially when those cause sudden spikes in the calculated foot speeds?
How did they do it?
The approach uses simple, practical ideas built on the robot’s own body and legs.
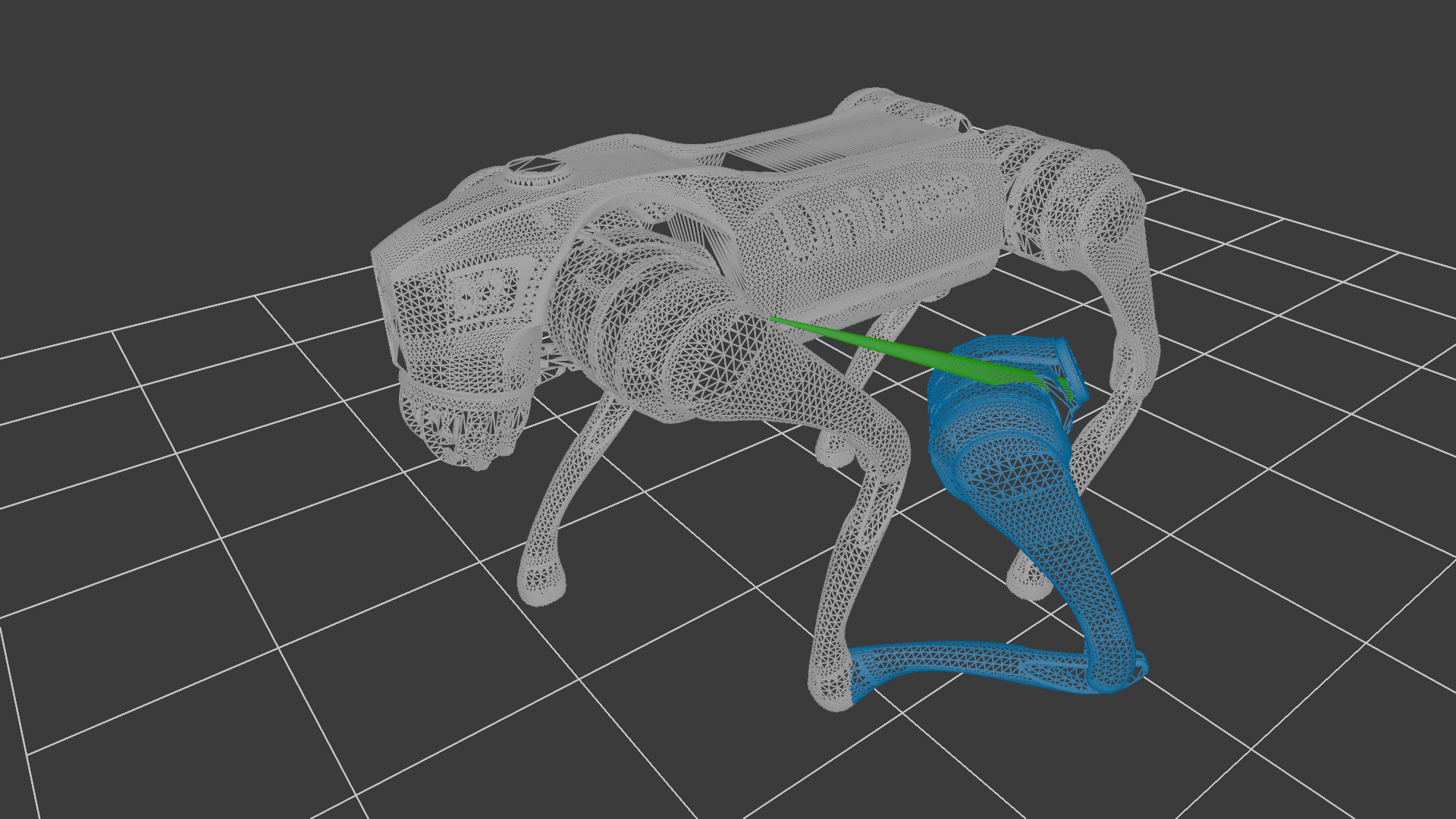
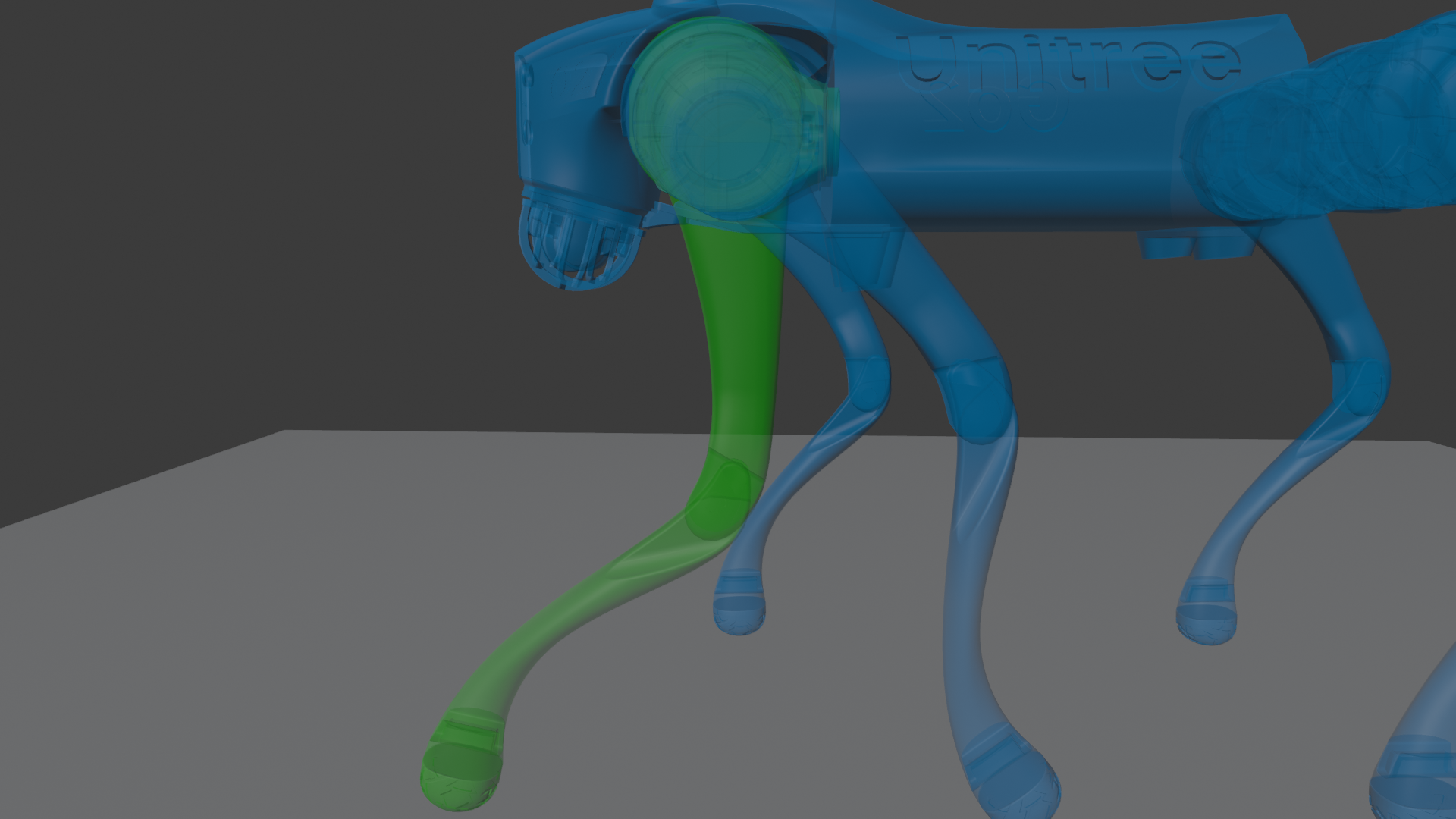
Using feet as anchors
Imagine each foot is like a pushpin the robot places on the ground when it steps. When a foot touches down, the robot records that foot’s location in the world. While the foot stays on the ground (during “stance”), the foot is assumed to be stationary. That makes the foot a trusted anchor point. By comparing the body’s leg positions to these fixed foot locations, the robot can figure out its own body position and speed much more reliably. If multiple feet are down, the robot blends their information together.
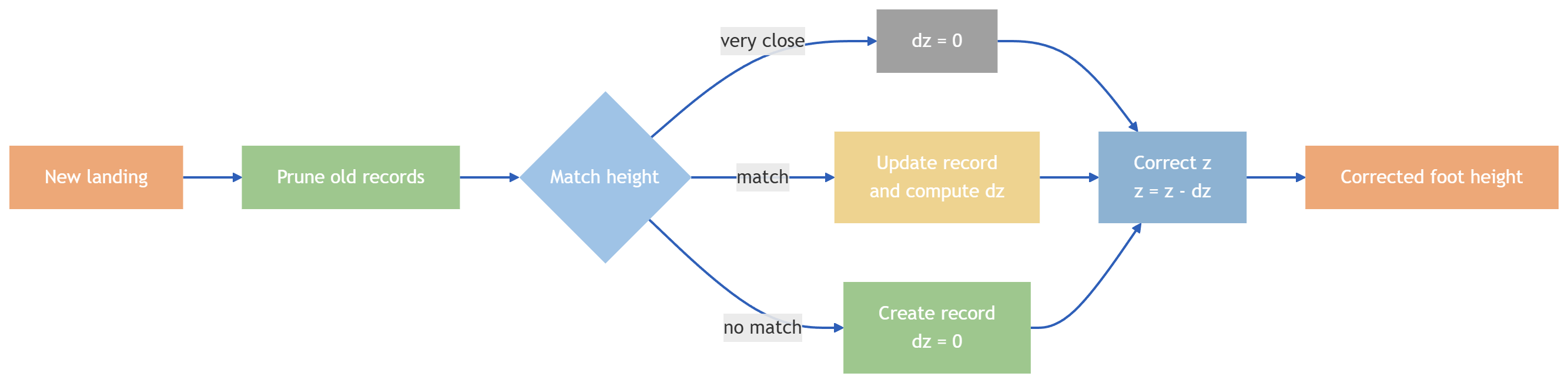
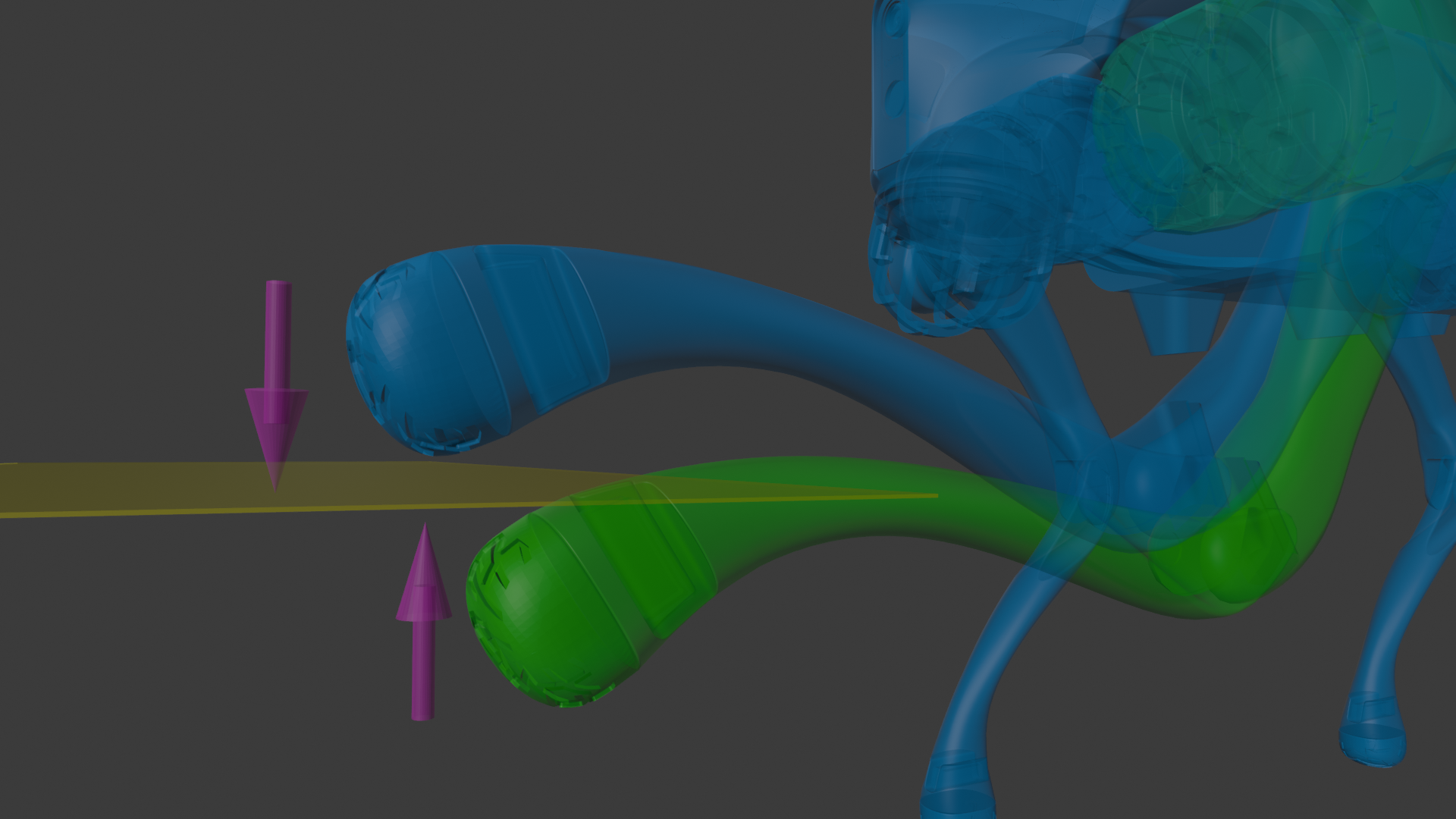
Fixing height drift
Robots often slowly drift up or down in their height estimate because small sensor biases add up. To prevent this, the method groups footstep heights into “planes” (think: floor levels or stair steps). When a new footstep lands, its height is snapped to the nearest known support level within a small tolerance. This keeps the estimated elevation consistent over long walks, stairs, and repeated step-ups/downs.
Smoothing noisy speed readings
Motor sensors can be “choppy” because they measure angles in steps (quantization) and are sampled in time, which can create spikes when you compute foot speed. The method uses a special nonlinear filter (a cubature Kalman filter, CKF) to directly estimate foot-end velocities from joint angles and speeds, avoiding big spikes. Think of it as a smart, math-based smoother that respects how the leg actually moves.
Handling wheels on legs
For robots with wheels on their legs, the contact point moves as the wheel rolls. The method “propagates” the recorded contact point forward by the wheel’s rotation and adjusts for leg pitching (so it doesn’t mistake leg motion for wheel rolling). This keeps the anchor accurate for wheel‑legged robots.
Keeping heading honest (yaw drift suppression)
Yaw (left-right heading) is hard to keep stable with only an IMU (inertial sensors) because gravity doesn’t tell you direction. When multiple feet are down and fixed, their geometry in the world should match the robot’s leg geometry in its body. If those don’t line up, that mismatch reveals the yaw error. The method gently corrects the robot’s heading during multi-foot contact and can even provide a backup heading when IMU yaw is unreliable.
What did they find?
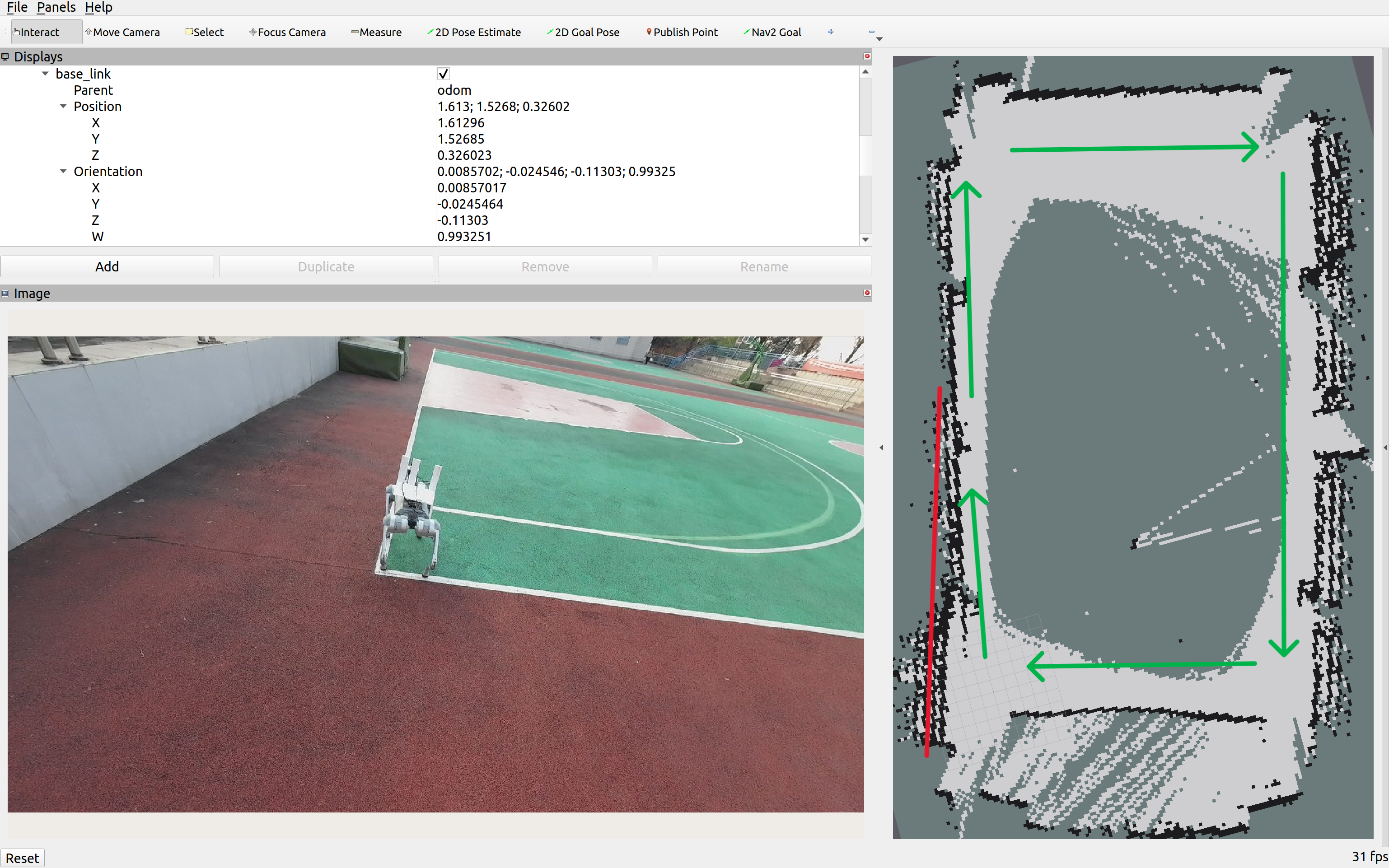
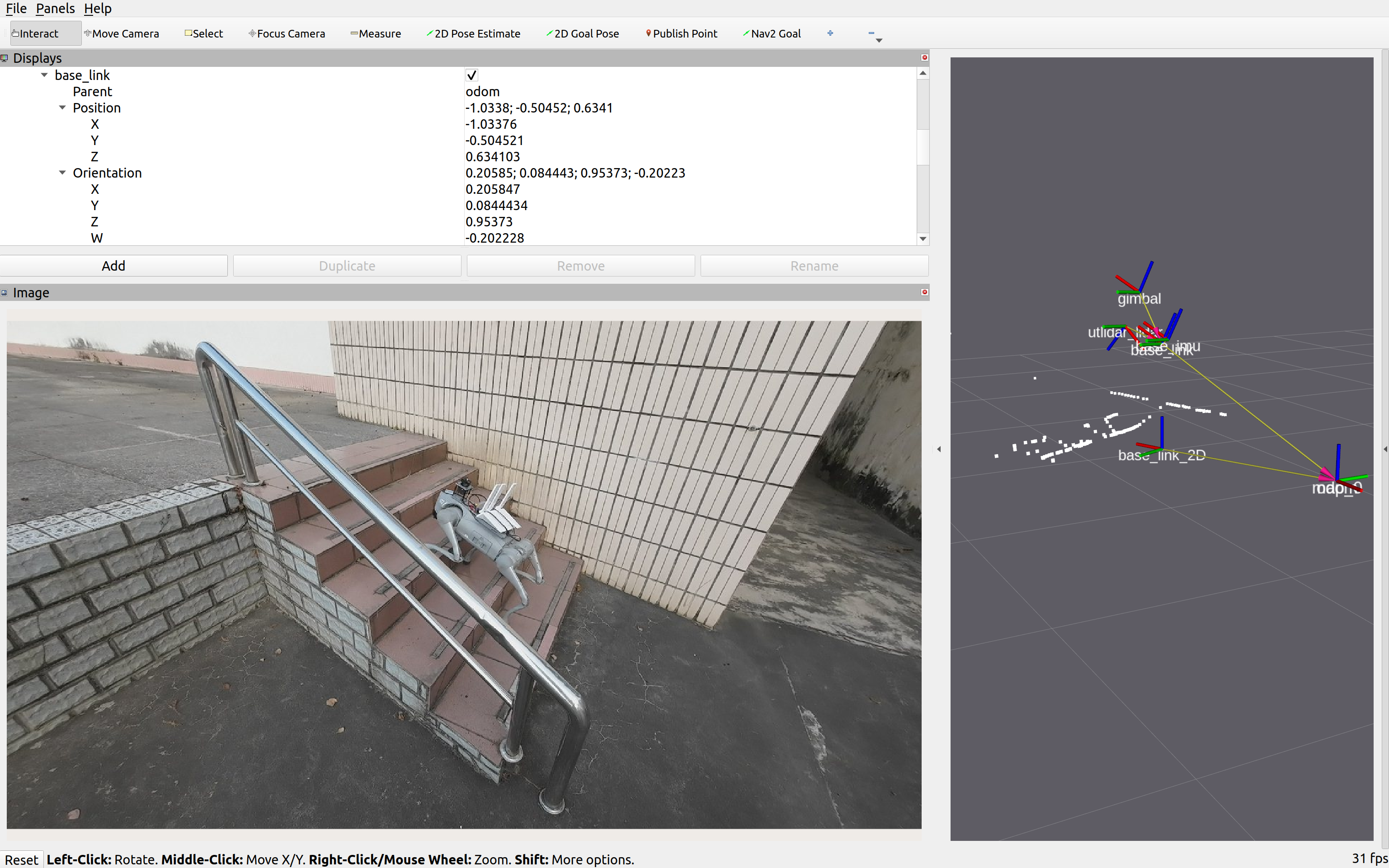
They tested their method on four real quadruped platforms (three Astrall robots and a Unitree Go2 EDU), running closed loops (returning to the starting point) on flat ground and with vertical changes (like steps and stairs). Here are some highlights:
- Astrall point‑foot robot A:
- About 200 m loop on flat ground returned with only ~0.16 m error.
- About 15 m vertical loop returned with ~0.22 m vertical error.
- Astrall wheel‑legged robot B:
- About 200 m loop returned with ~0.23 m error.
- About 15 m vertical loop returned with ~0.20 m vertical error.
- Astrall wheel‑legged robot C:
- About 700 m loop returned with ~7.68 m error (long path, still reasonable).
- About 20 m vertical loop returned with ~0.54 m vertical error.
- Unitree Go2 EDU:
- About 120 m loop returned with ~2.21 m error.
- About 8 m vertical loop returned with less than 0.1 m vertical error.
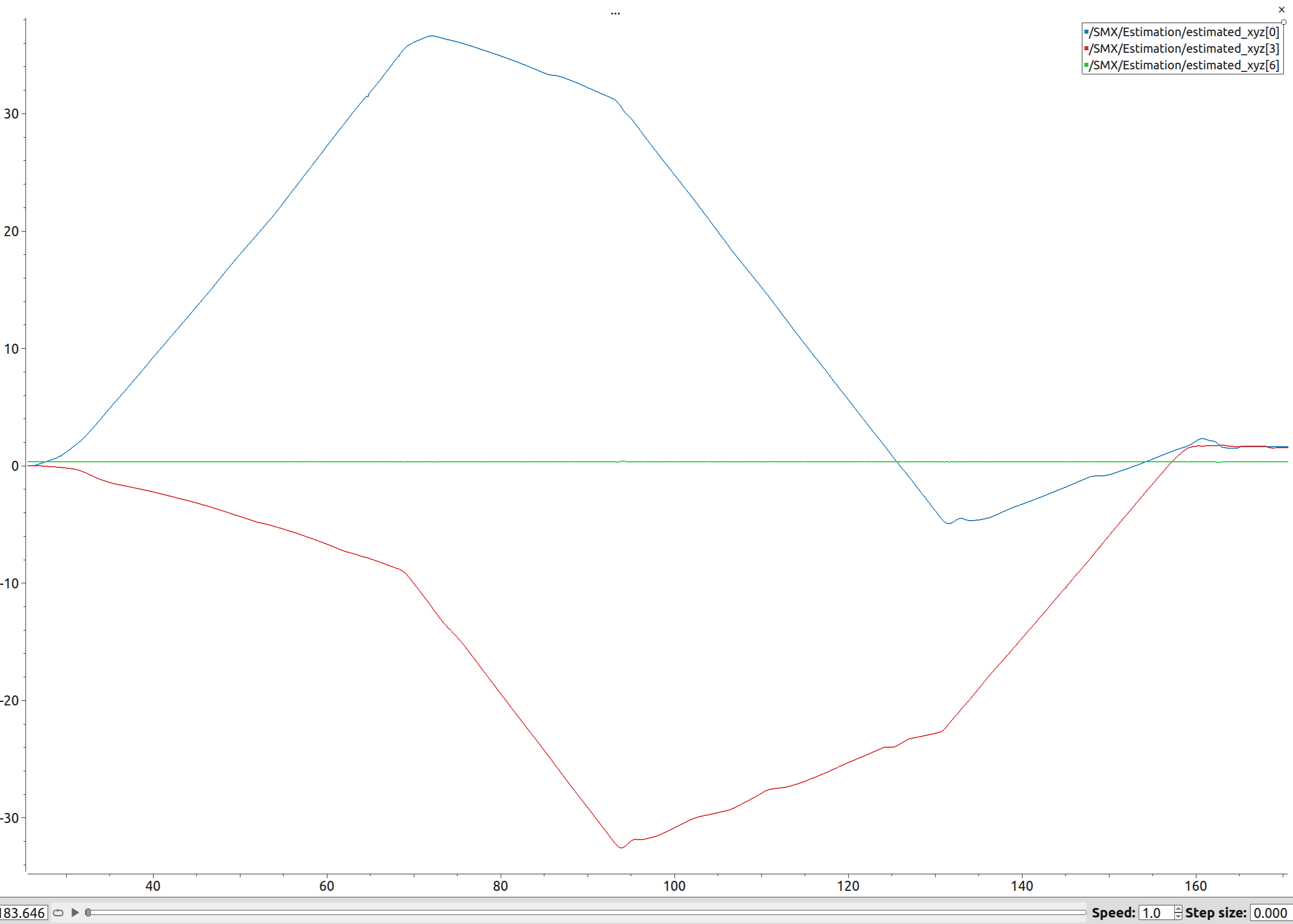
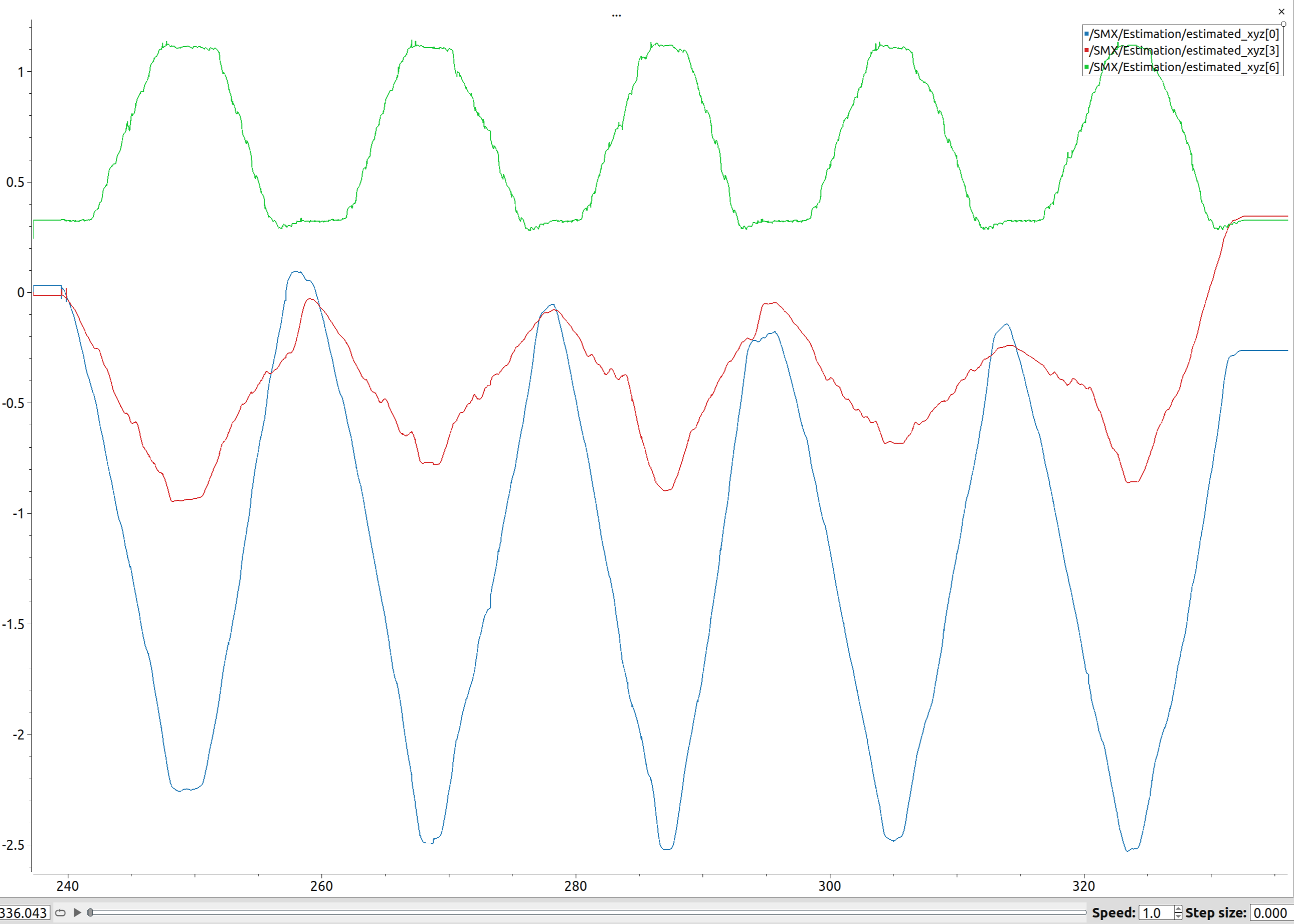
They also showed that the smoothing filter (CKF) reduces sudden speed spikes, which prevents false contact decisions and keeps height tracking stable—especially during bumpy motions like stair climbing. The authors released their full code and data so others can reproduce the results.
Why does it matter?
- Works without cameras or LiDAR: Useful in dark, smoky, dusty, or cluttered environments where vision sensors struggle.
- Lightweight and cost‑friendly: Fewer external sensors means simpler setups and potentially lower costs.
- General across robot types: One unified approach for bipeds, quadrupeds, and wheel‑legged robots.
- Better long-term reliability: Anchoring to foot contacts and correcting height and yaw reduce drift over long distances and complex terrains.
Final thoughts
This research shows a practical, unified way for legged robots to “know where they are” using only their internal senses. By treating each footstep as a trustworthy anchor, snapping heights to support planes, smoothing foot speeds, handling wheel rolling, and stabilizing heading, the method delivers accurate, robust odometry without relying on cameras or LiDAR. This can make robots more dependable and affordable in tough real-world conditions, and the public code release helps the community build on these ideas.
Knowledge Gaps
Unresolved knowledge gaps, limitations, and open questions
Below is a concise list of concrete gaps and open problems the paper leaves unresolved, intended to guide future research:
- Residual yaw drift and observability: Provide a formal observability/consistency analysis of yaw under varying contact patterns; quantify when the multi-contact geometric correction is well-conditioned, and how drift scales with gait parameters and baseline geometry.
- Degenerate yaw constraints: Analyze and detect ill-conditioned cases (e.g., collinear contacts, short baselines, symmetric foot placements); design baseline-length/geometry-aware weighting and conditioning checks to prevent harmful yaw updates.
- Single- and sparse-contact phases: Develop robust heading estimation for bipeds and gaits with long single-support or sparse contact; quantify degradation and propose temporal aggregation or inertial priors to bridge unsupported intervals.
- Slip/compliance robustness: Move beyond torque-threshold contact gating to explicit slip and compliance estimation (e.g., probabilistic models, F/T sensors, foot IMUs, learning-based classifiers); evaluate on low-friction and deformable terrains.
- Height correction limited to z-only planes: Extend the height clustering (currently scalar z) to estimate full 3D support plane normals and/or piecewise surfaces; quantify performance on ramps, cross-slopes, and uneven terrain.
- Risk of height quantization/bias: Provide bounds and empirical analysis of vertical bias introduced by snapping to planes; develop adaptive thresholds or uncertainty-aware snapping to avoid over-correction on gently varying surfaces.
- Wheel-leg propagation assumptions: Generalize the wheel contact propagation beyond body-forward projection and no-slip assumptions; derive a Jacobian-based mapping from joint-space motion to wheel–ground rolling and handle steerable/articulated wheels and lateral slip.
- Online wheel/foot parameter calibration: Calibrate wheel radius and effective foot radius online and quantify sensitivity to their errors; study the impact of tire wear and temperature on radius estimates.
- Rounded-foot modeling in 3D: Extend the 2D sagittal analysis to full 3D rolling/contact patch motion and different foot geometries/compliance; experimentally validate bias vs. foot radius, terrain, and gait.
- Slip-aware anchor maintenance: Add robust, history-aware logic (hysteresis, outlier rejection) to prevent a single velocity spike from corrupting footfall records; evaluate multi-cue touchdown/liftoff decisions.
- Fusion weighting and uncertainty: Replace equal averaging across contacts with statistically principled fusion (covariance-aware weighting by contact reliability, baseline geometry, and force estimates); add robust M-estimators.
- Time synchronization and latency: Characterize and compensate IMU–encoder time offset and jitter; investigate online time-delay estimation and its effect on stance velocity spikes.
- Sensor and kinematic calibration: Quantify sensitivity to kinematic parameter errors and IMU-to-body misalignment; provide online calibration for link lengths, joint offsets, IMU extrinsics, and encoder scale factors.
- Dynamics-induced tilt errors: Analyze roll/pitch estimation under dynamic accelerations; integrate leg constraints or zero-velocity updates to improve tilt during high-excitation motions.
- High-speed and aerial phases: Evaluate performance on fast trotting/bounding, agile maneuvers, and extended flight phases; design prediction strategies and constraints to limit drift when stance updates are unavailable.
- Computational footprint and embedded viability: Report real-time CPU/memory usage on typical robot controllers (not just MATLAB/MEX); explore lighter alternatives to CKF (e.g., invariant EKF, factor-graph smoothing) or GPU/SIMD acceleration.
- IKVel-CKF tuning and models: Document process/measurement noise models, tuning procedures, and parameter sensitivity; explore auto-tuning and compare CKF to UKF/InEKF/iterative smoothing on the same tasks.
- Dataset and benchmarking gaps: Provide ground-truth evaluations (e.g., motion-capture, RTK-GNSS/INS) and compare against state-of-the-art proprioceptive odometry (e.g., InEKF, factor-graph leg odometry); release logs for all platforms (not only Go2) with calibration files.
- Long-duration robustness: Study hours-long runs, thermal effects, and IMU bias drift; integrate bias estimation/recalibration without exteroception and report long-term drift rates.
- Robustness to sensor failures: Investigate resilience to encoder dropouts, torque-estimate inaccuracies, and IMU saturation; design failover strategies (e.g., kinematics-only modes, redundancy) and fault detection.
- Terrain diversity: Systematically evaluate on loose gravel, wet floors, soft/deformable ground, and highly irregular outdoor terrain; quantify failure modes and adapt thresholds/filters to terrain properties.
- Stair/ramp coverage limits: Map out performance boundaries over step heights, tread depths, and inclinations; adjust height clustering and contact gating to handle extreme transitions.
- World-frame and yaw–position coupling: Analyze how yaw drift couples into horizontal position error via contact anchoring; explore decoupling strategies (e.g., turn-in-place ZUPTs, contact-map alignment).
- Minimal exteroceptive aids: Explore proprioceptive-dominant pipelines that opportunistically fuse cheap cues (magnetometer, barometer, UWB beacons) to tame yaw and vertical drift without heavy SLAM.
- Formal guarantees for height clustering: Provide stability/convergence guarantees under measurement noise and intermittent plane revisits; study time-decay schedules and their effect on plane persistence.
- Encoder specifications vs. accuracy: Quantify the relationship between encoder resolution/sampling rate and odometry quality; set minimum sensor specs or propose prefiltering/interpolation strategies.
Practical Applications
Immediate Applications
The following applications can be deployed now, leveraging the released ROS2 implementation and demonstrated performance across multiple quadruped and wheel‑legged platforms.
- Contact‑anchored fallback odometry for legged robots in vision/LiDAR‑degraded environments (robotics; software)
- Use case: Maintain reliable state estimation in dust, fog, low light, vegetation clutter, or camera failure.
- Tools/workflows: Integrate the released ROS2 estimator into existing robot stacks; enable torque‑based contact gating and footfall anchoring; turn on IKVel‑CKF only when velocity spikes affect downstream control.
- Assumptions/dependencies: Accurate IMU, encoder/torque estimation, time synchronization; non‑extreme slip; correct kinematic parameters.
- Cost‑reduction for commercial legged platforms by removing or minimizing exteroceptive sensors (finance; robotics)
- Use case: Lower bill of materials and power consumption for fleets operating indoors or in structured environments.
- Tools/products: “Proprioceptive Odometry SDK” as a firmware/ROS2 module for OEMs.
- Assumptions/dependencies: Tasks do not require global loop closure or absolute heading; acceptable residual yaw drift over long horizontal loops.
- Industrial inspection in constrained or particulate environments (energy; mining; construction; oil & gas; robotics)
- Use case: Traverse tunnels, substations, turbine halls, underground conduits where vision is unreliable.
- Workflows: Footfall recording as intermittent world‑frame constraints for drift suppression; height plane clustering for consistent elevation on stairs/steps.
- Assumptions/dependencies: Contact conditions are mostly firm; wheel radius and leg geometry calibrated; occasional slips are detected/gated.
- Warehouse/night‑shift operations without lights or reflective markers (logistics; robotics)
- Use case: Inventory patrols and floor checks when vision is disabled or undesirable.
- Tools: Multi‑contact geometric yaw suppression during prolonged standing; kinematics‑derived heading fallback when IMU yaw is unreliable.
- Assumptions/dependencies: Frequent multi‑contact stance to stabilize heading; floors with moderate friction.
- Privacy‑preserving service robots in hospitals and offices (healthcare; policy; robotics)
- Use case: Operate in sensitive areas with restricted cameras while maintaining reliable pose.
- Tools/workflows: Camera‑off operating mode with proprioceptive odometry; audit logs of contact/wrench estimates for safety monitoring.
- Assumptions/dependencies: Smooth floors; low slip/compliance; policy acceptance of purely proprioceptive operation.
- Field robotics for public safety and SAR under smoke or darkness (public safety; defense; robotics)
- Use case: Maintain navigation when exteroception fails; hold position accurately while stationary.
- Tools: Multi‑contact yaw anchoring to arrest IMU yaw drift during standby; contact‑anchored velocity for controlled motions.
- Assumptions/dependencies: Reliable contact detection; occasional repositioning to refresh footfall anchors.
- Academic research baselines and teaching labs (academia; education; software)
- Use case: Reproducible benchmarking of proprioceptive odometry across morphologies (biped/quadruped/wheel‑legged).
- Tools/products: Released ROS bags and synchronized videos; CKF module for inverse‑kinematics velocity estimation; plug‑and‑play ROS2 nodes.
- Assumptions/dependencies: Students/teams can calibrate kinematics and synchronize IMU/motor streams.
- Controller‑side velocity smoothing to improve gait stability (robotics; software)
- Use case: Replace raw encoder‑derived joint rate projections with IKVel‑CKF to suppress spikes that destabilize controllers.
- Tools: Optional IKVel‑CKF node feeding stance‑phase velocity constraints.
- Assumptions/dependencies: Compute budget headroom (CKF >2× per‑cycle cost); acceptance of small phase lag.
- Wheel‑legged platform odometry with rolling contact compensation (robotics; software)
- Use case: Reduce systematic bias when wheels roll in stance by propagating effective rolling displacement into footfall records.
- Tools/workflows: Effective rolling angle computed by subtracting shank pitch; planar contact‑point propagation and velocity augmentation.
- Assumptions/dependencies: Accurate wheel radius; well‑estimated joint angles/velocities; limited wheel slip.
- Facility “support‑plane” logging for elevation consistency and diagnostics (facilities management; software)
- Use case: Track and snap touchdown heights to stable support planes to avoid vertical drift across stairs/steps.
- Tools/products: Lightweight height clustering with time‑decay; visualization of plane records for route safety audits.
- Assumptions/dependencies: Configured plane resolution and fade time suitable for the environment; limited compliance.
- Robot health monitoring via contact/wrench and encoder quality (software; robotics; operations)
- Use case: Detect abnormal encoder quantization/timing mismatch or degraded contact conditions during missions.
- Tools/workflows: Thresholded wrench‑based contact gating; alarms for excessive velocity spikes; logs for maintenance.
- Assumptions/dependencies: Access to joint torque estimates; calibrated gating thresholds.
- Robotics competitions and GNSS/vision‑denied challenges (education; robotics)
- Use case: Quickly field legged robots with robust proprioceptive state estimation for dark and dusty arenas.
- Tools: Turnkey ROS2 integration; parameter presets for common platforms (e.g., Unitree Go2).
- Assumptions/dependencies: Basic platform calibration; operator familiarity with stance gating/anchor resets.
Long‑Term Applications
These opportunities require further research, scaling, or productization (e.g., handling compliance/slip, broader terrain types, safety certification).
- Humanoid and assistive robots with exteroception‑free locomotion on stairs/uneven terrain (healthcare; robotics)
- Product vision: Home‑care robots capable of safe traversal without cameras in privacy‑sensitive contexts.
- Dependencies: Robust slip/compliance modeling; richer contact classification; extensive safety trials and certification.
- Hybrid fusion stacks combining contact anchors with sparse exteroception for heading and loop closure (software; robotics)
- Workflow: Use camera/LiDAR sparingly for yaw and global corrections while relying on proprioception for continuous operation.
- Dependencies: Multi‑sensor time sync; adaptive trust gating; failure‑mode analysis; compute scheduling.
- Standardization and policy frameworks for privacy‑first legged operation (policy; industry consortia)
- Outcome: Guidelines and certification for “camera‑off” robots using proprioceptive odometry in hospitals, offices, and factories.
- Dependencies: Field reliability data, incident reporting, alignment with safety norms and labor regulations.
- Facility “floor topology maps” from aggregated support planes (facilities; energy; software)
- Product: Lightweight elevation/topology mapping for building maintenance, energy audits, and accessibility planning.
- Dependencies: Long‑run aggregation across routes; plane association across sessions; semantic labeling integration.
- Autonomous inspection in high‑hazard domains (nuclear, chemical, offshore) (energy; public safety; robotics)
- Use case: Maintain state estimation where optics are degraded and radiation/chemicals restrict sensor choices.
- Dependencies: Radiation‑hardened IMUs/encoders; slip‑resilient contact estimation; redundant anchors; rigorous validation.
- Consumer legged robots for dark or cluttered homes (daily life; consumer robotics)
- Product vision: Pet/companion or cleaning robots that navigate reliably without cameras, protecting privacy.
- Dependencies: Robust performance on carpets and compliant floors; low‑cost hardware; user‑friendly calibration.
- Learning‑augmented contact estimation and terrain adaptation (academia; software; robotics)
- Workflow: Integrate learned contact classifiers and slip detectors into CAPO to improve gating on difficult terrains.
- Dependencies: Diverse datasets; on‑robot training/inference; generalization across morphologies and environments.
- Hardware–software co‑design for proprioception (industry; robotics; finance)
- Outcome: Encoders with lower quantization noise, better torque estimation, IMUs with reduced bias; standardized time‑sync buses.
- Dependencies: Vendor collaboration; ROI analysis showing savings from reduced exteroceptive hardware.
- Scalable fleets and multi‑robot operations using contact anchors (logistics; robotics)
- Use case: Swarm‑like legged platforms performing patrols/inspections with minimal sensing.
- Dependencies: Fleet management, inter‑robot drift correction, shared support‑plane maps, robustness to heterogeneous hardware.
- CAPO‑enhanced SLAM and planning (software; academia; robotics)
- Product: SLAM modules that treat footfall anchors and height planes as strong priors to reduce compute and stabilize elevation.
- Dependencies: API integration, factor‑graph formulations, evaluation on large‑scale loops.
- Safety‑critical certification and failover design (policy; robotics; operations)
- Outcome: Verified behavior under sensor failures (IMU yaw degradation, torque misestimation), with kinematics‑only fallback.
- Dependencies: Formal verification, redundancy strategies (e.g., magnetometer or occasional beacon), long endurance trials.
- Cross‑domain anchoring for manipulation (robotics; academia)
- Vision: Extend “contact anchors” to end‑effectors in manipulation (arms anchoring to fixtures) for drift suppression during tasks.
- Dependencies: Generalized contact models, compliant contact handling, unified state estimators for loco‑manipulation.
Glossary
- Attitude quaternion: A unit quaternion representing 3D orientation used to derive directions from attitude. "extracts directly from the current attitude quaternion and normalizes the planar component."
- Body frame: The coordinate frame rigidly attached to the robot’s trunk. "a body frame attached to the robot trunk."
- Circular mean: An averaging method for angles that accounts for their wrap-around nature. "we aggregate all available pairs using a circular mean:"
- Closed-loop trajectories: Paths that start and end at the same place, used to assess drift by loop closure error. "We evaluate the method on four quadruped platforms (three Astrall robots and a Unitree Go2 EDU) using closed-loop trajectories."
- Contact-anchored proprioceptive odometry: Odometry that uses contact events as anchors, relying only on internal sensors. "This section presents the contact-anchored proprioceptive odometry implemented in our system"
- Cubature Kalman filter (CKF): A sigma-point nonlinear filter that uses cubature points to approximate Gaussian integrals without Jacobians. "we apply an inverse-kinematics cubature Kalman filter that directly filters foot-end velocities from joint angles and velocities."
- Differential inverse-kinematics: The mapping from desired end-effector velocities to joint velocities via the Jacobian inverse. "an analytic inverse-kinematics and differential inverse-kinematics mapping."
- Effective rolling angle: The net wheel rotation relative to the ground after removing leg-induced pitch contributions. "by estimating an effective wheel rolling angle that removes the apparent rotation induced by shank pitching"
- End-effector: The terminal point of a kinematic chain (e.g., a foot or wheel) that interacts with the environment. "The body-frame end-effector position is then"
- Encoder quantization: Discretization effects in encoder measurements that introduce stepwise noise and spikes. "To improve foot velocity observations under encoder quantization, we apply an inverse-kinematics cubature Kalman filter"
- Exteroceptive sensors: Sensors that perceive the external environment (e.g., cameras, LiDAR). "exteroceptive sensors such as depth cameras and LiDAR are coupled with SLAM"
- Footfall: The world-frame position at which a foot makes contact with the ground, used as an anchor. "We record world-frame contact (footfall) positions at touchdown"
- Forward kinematics: Computing end-effector pose from joint angles using the robot’s kinematic chain. "forward kinematics yields the end-effector position and velocity"
- Gazebo: A physics-based robotics simulator used for testing algorithms. "We first evaluate the proposed estimator in physics simulation using Unitree's AlienGo model in Gazebo."
- Geometric Jacobian: The matrix relating joint velocities to end-effector spatial velocities. "the end-effector force is estimated from joint torques and the geometric Jacobian"
- Height clustering: Grouping footfall heights into planes to stabilize elevation estimates. "we introduce a lightweight height clustering and time-decay correction"
- Inertial measurement unit (IMU): A sensor providing accelerations and angular velocities used for state estimation. "including an inertial measurement unit (IMU) and motor encoder readings"
- Invariant EKF: An Extended Kalman Filter formulated on Lie groups to respect system symmetries. "invariant EKF formulations have been explored for legged state estimation"
- Inverse kinematics: Determining joint configurations that achieve a desired end-effector pose. "under an inverse-kinematics observation model"
- Kinematics-based yaw estimation: Estimating heading from the geometry of multi-contact configurations and body kinematics. "Kinematics-Based Yaw Estimation via Multi-Contact Geometric Consistency"
- LiDAR: Light Detection and Ranging sensor for distance measurement via laser scanning. "exteroceptive sensors such as depth cameras and LiDAR"
- Morphology-agnostic: Applicable across different robot body forms (biped, quadruped, wheel-legged). "The framework is morphology-agnostic"
- Multi-contact geometric consistency: Using the fixed geometry among multiple contacts to constrain orientation (yaw). "mitigates yaw drift through multi-contact geometric consistency"
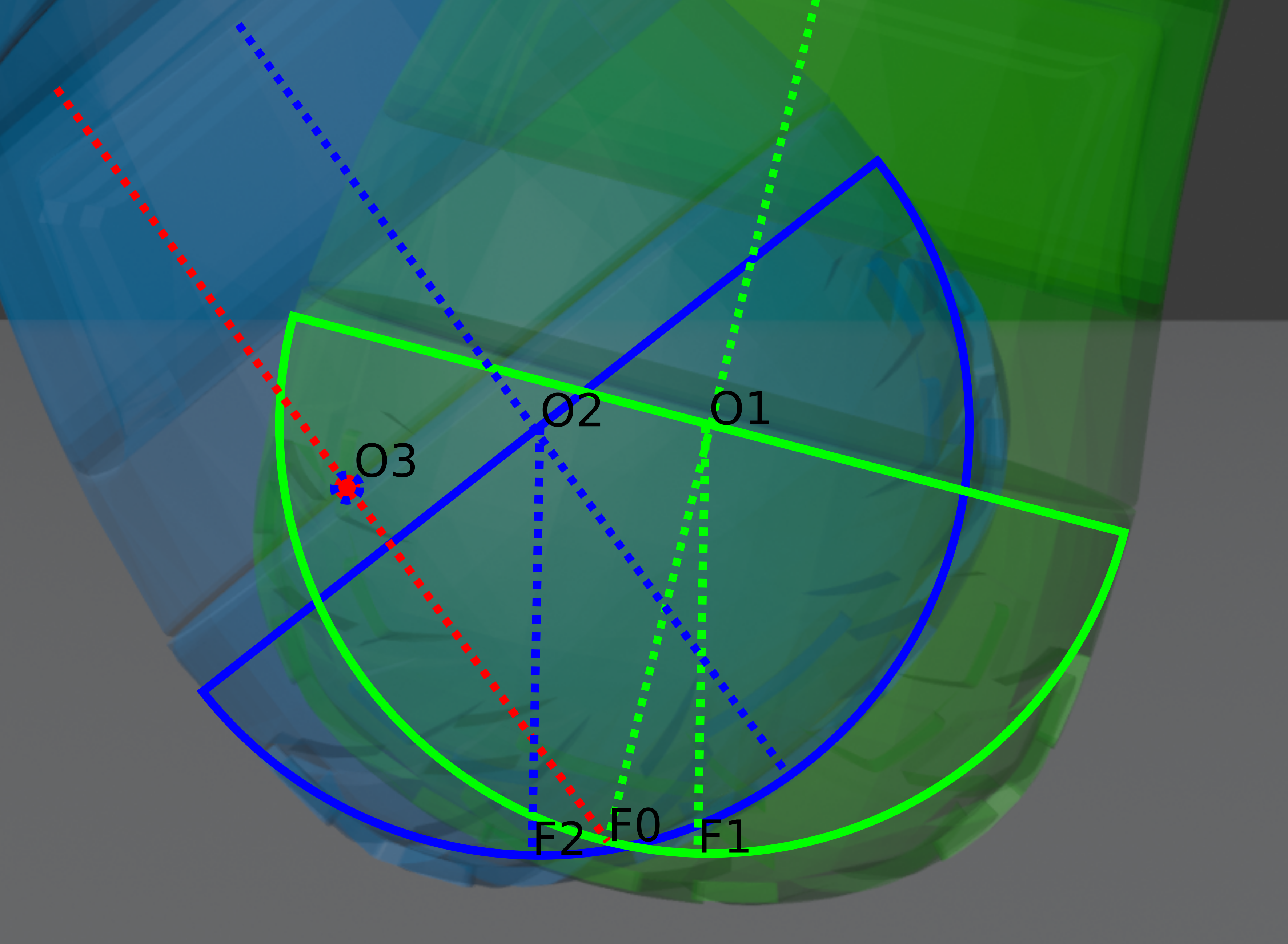
- No-slip rolling: Rolling without relative motion at the contact patch, so contact point moves according to wheel rotation. "Under no-slip rolling, the touchdown contact is the vertical projection of "
- Odometry: Estimating position and orientation over time from motion sensors. "Reliable odometry for legged robots without cameras or LiDAR remains challenging"
- Observability: The degree to which a system’s internal state can be inferred from measurements. "Hybrid systems that incorporate cameras can provide stronger observability"
- Planar closure error: The 2D distance between start and end positions after a loop, used to quantify drift. "Horizontal-loop error is reported as the planar closure error ."
- Proprioceptive odometry: Odometry relying only on internal sensors (IMU, encoders) rather than external perception. "This work targets robust purely proprioceptive odometry"
- ROS bags: Recorded datasets of ROS topics (sensor streams) for offline analysis and reproducibility. "and the ROS bags of the Go2 EDU trials, including synchronized video, to enable reproducible evaluation."
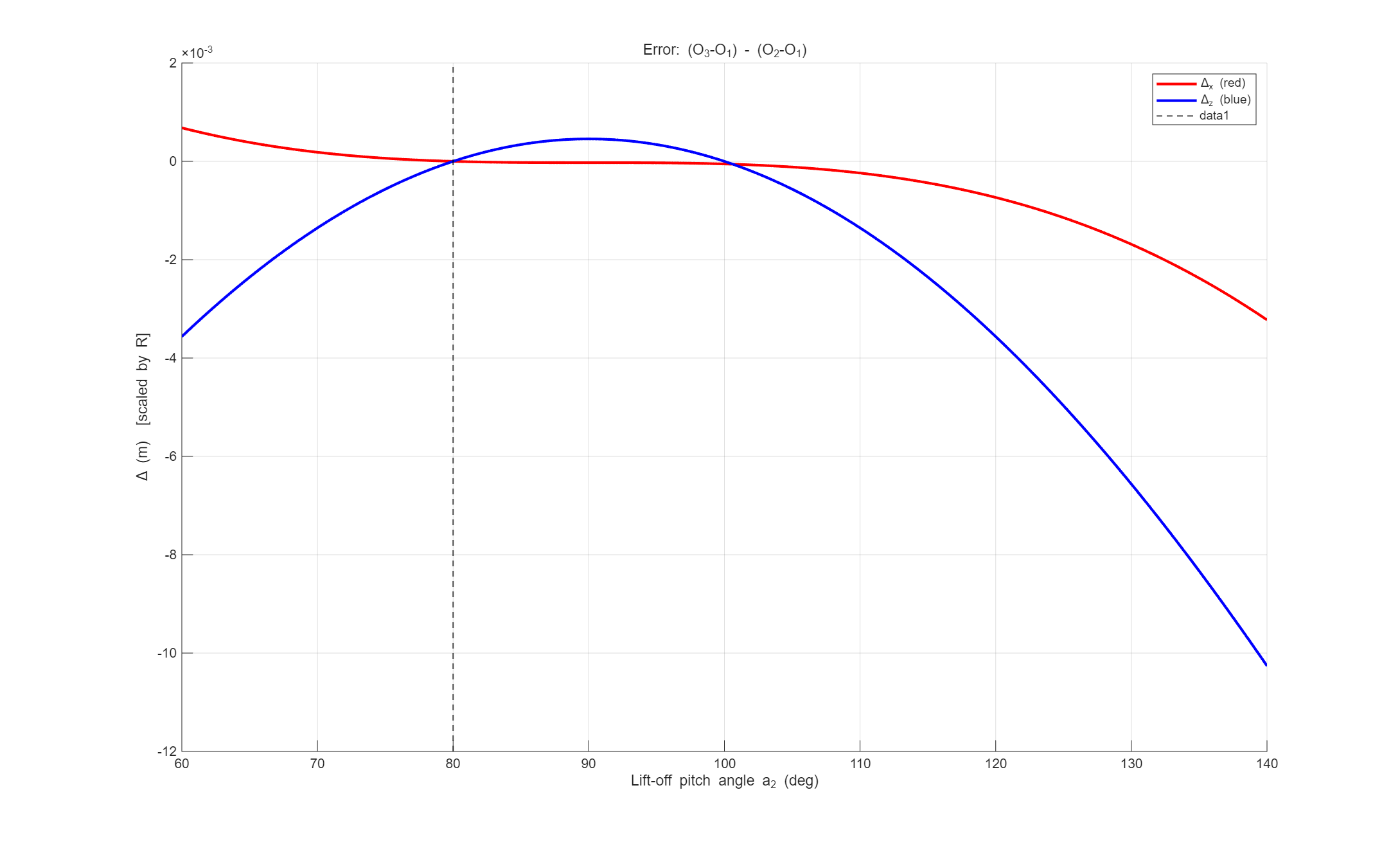
- Sagittal-plane: The 2D plane that splits the body into left and right, often used for legged gait analysis. "We analyze a 2D sagittal-plane (--) model"
- Scan matching: Aligning LiDAR scans to build maps or estimate motion. "with scan matching disabled"
- SLAM: Simultaneous Localization and Mapping, jointly estimating robot pose and a map. "are coupled with SLAM to provide global state feedback"
- Stance: The phase when a leg is in contact with the ground and supports the body. "During stance (), the footfall point is assumed stationary in ."
- Support-plane height correction: Adjusting footfall heights to clustered planes to suppress vertical drift. "including stance selection, footfall recording, and support-plane height correction."
- Tilt-only rotation: A rotation containing only roll and pitch components, excluding yaw. "We assume roll and pitch are available from the state estimator (e.g., IMU tilt) and isolate heading by constructing a tilt-only rotation"
- Time-decay correction: Reducing the influence of older plane-height records over time to maintain responsiveness. "height clustering and time-decay correction that snaps newly recorded footfall heights to previously observed support planes."
- Touchdown: The event when a foot makes initial contact with the ground. "A touchdown event is detected by"
- UKF: Unscented Kalman Filter, a sigma-point filter using deterministic sampling; here referenced via its parameterization. "avoids UKF-style scaling parameters"
- Virtual-work mapping: The relation between joint torques and end-effector wrench via the Jacobian transpose. "the virtual-work mapping "
- Wheel-legged robot: A legged robot with wheels at the end-effectors that can roll during contact. "applicable to biped, quadruped, and wheel-legged robots."
- World frame: The fixed global coordinate frame used as the reference for positions and orientations. "We consider a world frame and a body frame "
- Wrap: Mapping angles into a principal interval (e.g., (-π, π]) to avoid discontinuities. "where maps angles to to avoid discontinuities."
- Wrench: The combined force and torque vector acting at a point; here used for contact estimation. "The estimated end-effector force is the wrench-equivalent force"
- Yaw drift: Gradual unbounded error in heading when relying on inertial sensing without absolute yaw references. "mitigates yaw drift through multi-contact geometric consistency"
Collections
Sign up for free to add this paper to one or more collections.