- The paper introduces a bio-inspired hierarchical co-design that integrates networking and control to minimize overhead in large-scale UAV swarms.
- The paper employs pigeon-like and starling-like algorithms for intra-formation and inter-formation control, ensuring stable and agile swarm maneuvers.
- The paper demonstrates reduced communication and control overhead through simulation, outperforming traditional protocols in dynamic UAV operations.
Summary of "Bio-inspired Integrated Networking and Control for Large-Scale Swarm: A Hierarchical Co-design"
Introduction
The paper addresses the twin challenges facing large-scale unmanned aerial vehicle (UAV) swarms: the substantial overhead associated with both network management and formation control requirements. To tackle these challenges, the authors propose a Bio-inspired Integrated Networking and Control (BINC) scheme, which facilitates efficient formation and network management for swarms of thousands of UAVs. The BINC scheme establishes a two-layer hierarchical structure where each cluster aligns with formation controls, effectively eliminating cross-cluster control overhead. This architecture incorporates bio-inspired algorithms for both intra-formation and inter-formation control.
Bio-Inspired Networking and Control Architecture
At the core of BINC's architecture is the integration of networking and control. For networking, a fused message design embeds control information into routing packets, thereby reducing communication overhead and swift command dissemination. Cluster formation is limited to localized two-hop topologies to enhance transmission speed and reliability. For control, BINC employs a combination of algorithms: a pigeon-like leader-follower approach within formations ensures stability and cohesion, while a starling-like algorithm among formations augments obstacle avoidance capabilities across swarms.
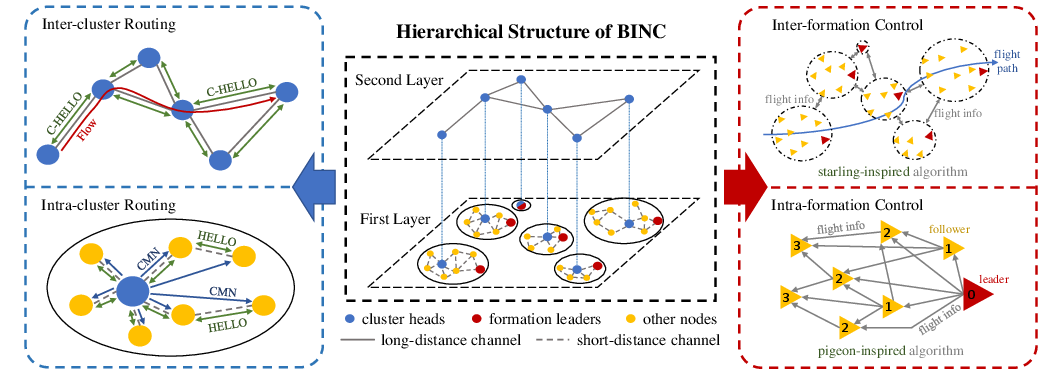
Figure 1: Overall framework of the proposed BINC scheme.
System Design and Implementation
Network Model: Each UAV houses a dual-channel communication system, facilitating distinct short-range and long-range interactions. Short-distance communication is bounded by a transmission radius, promoting two-hop topological clustering. Long-distance communication links cluster heads across the network's hierarchical second layer.
Motion Model: The motion model is bifurcated into node-level operations and formation-based calculations. At the core is the leader node, which governs trajectory and velocity, cascading control decisions to local formations.
Hierarchical Networking and Routing
Message Format and Design: BINC uses distinct packet designs for intra-cluster and inter-cluster communications. The HELLO, C-HELLO, and CMN messages convey position, velocity, and connectivity data, enabling swift head election and neighborhood awareness. These packets are integral to maintaining a lightweight routing protocol, minimizing excessive network flooding while propagating essential control information.
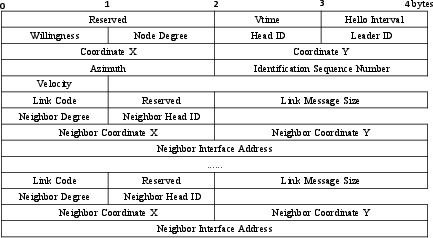
Figure 2: The packet format of HELLO messages.
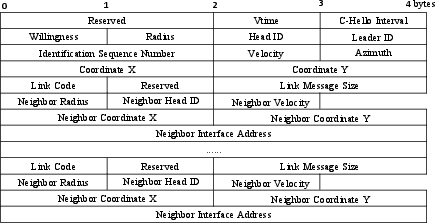
Figure 3: The packet format of C-HELLO messages.
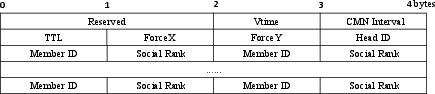
Figure 4: The packet format of CMN messages.
Pigeon-inspired Algorithms: Within formations, UAVs adhere to hierarchical structures, mimicking pigeon flock dynamics to establish leader-follower relationships. Interaction forces are determined by spatial proximity, fostering self-organized separation, alignment, and cohesion.
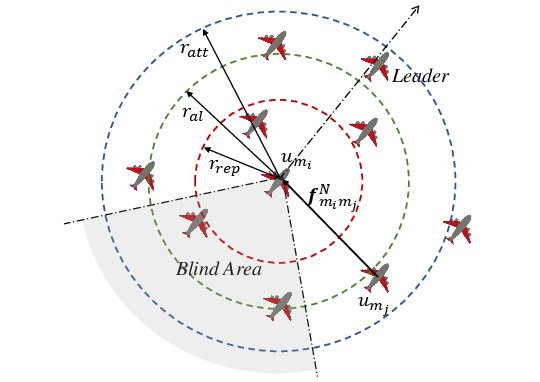
Figure 5: Neighbor interaction model of pigeon-like formation control.
Starling-inspired Swarm Behavior: At the formation level, control algorithms adapt starling-like interaction models to preserve alignment and avoid collisions. The discrete zone-based strategy allows for effective local following and obstacle evasion.
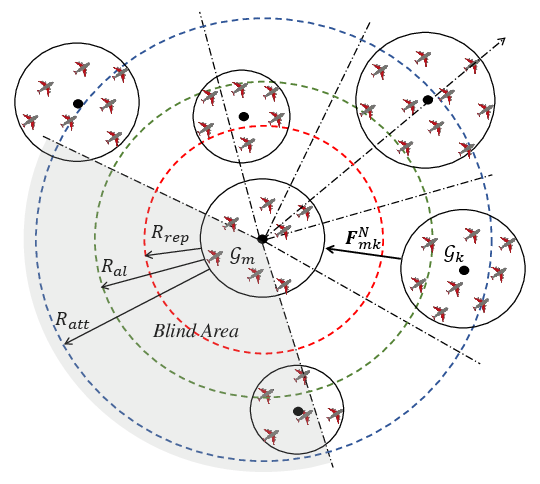
Figure 6: Neighboring interaction model of starling-like control with 5 observation regions.
Communication Overhead: BINC scheme efficiently scales to accommodate swarms of varying densities, reducing routing overhead by integrating formation and network modalities. Performance metrics show substantial overhead reduction compared to classical protocols such as OLSR and CLSR.
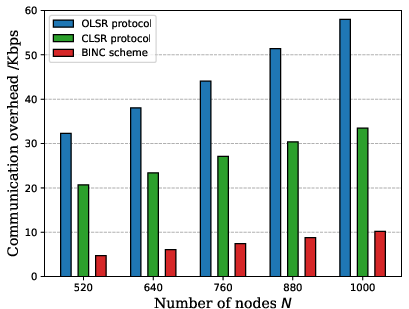
Figure 7: Results of average communication overhead with different protocols under different numbers of UAVs N.
Network Maintenance and Control Maneuverability: Simulation results demonstrate BINC's proficiency in cluster stability and dynamic response during flight operations, highlighting its functionality in practical swarm navigation and avoidance tasks.
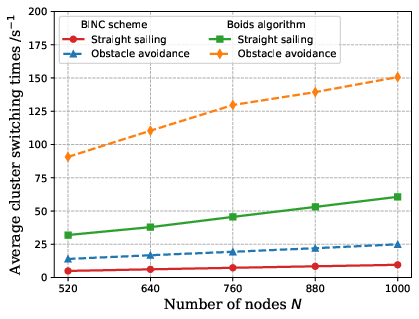
Figure 8: Results of the number of cluster switches with different control algorithms under different numbers of UAVs N.
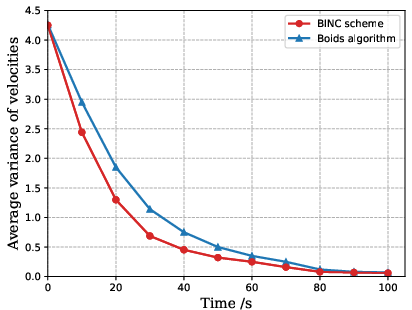
Figure 9: Results of average variance of velocity with different control algorithms.
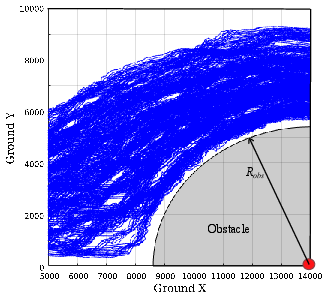
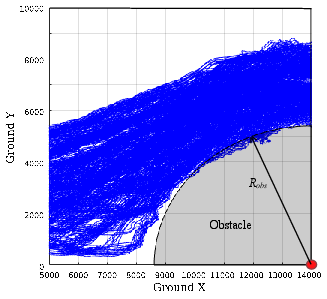
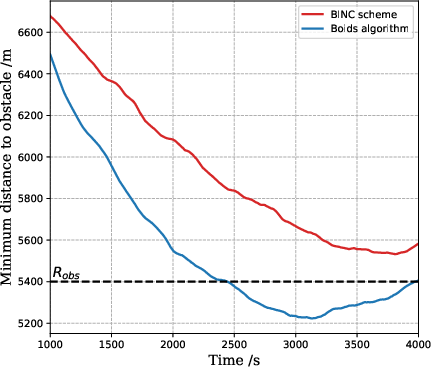
Figure 10: Results of the obstacle avoidance trajectories and minimum distances between obstacle and swarm with different control algorithms.
Conclusion
The BINC scheme offers a cohesive approach to large-scale UAV swarm management by coupling bio-inspired networking strategies with hierarchical control systems. This integration resolves fundamental challenges of overhead and scalability, establishing a blueprint for future UAV swarm deployments with enhanced mobility, agility, and communication efficacy. Through its innovative architecture, BINC demonstrates promising applications in diverse environments, suggesting pathways for new developments in swarm intelligence and multi-agent collaboration.

