Bioinspired Soft Quadrotors Jointly Unlock Agility, Squeezability, and Collision Resilience
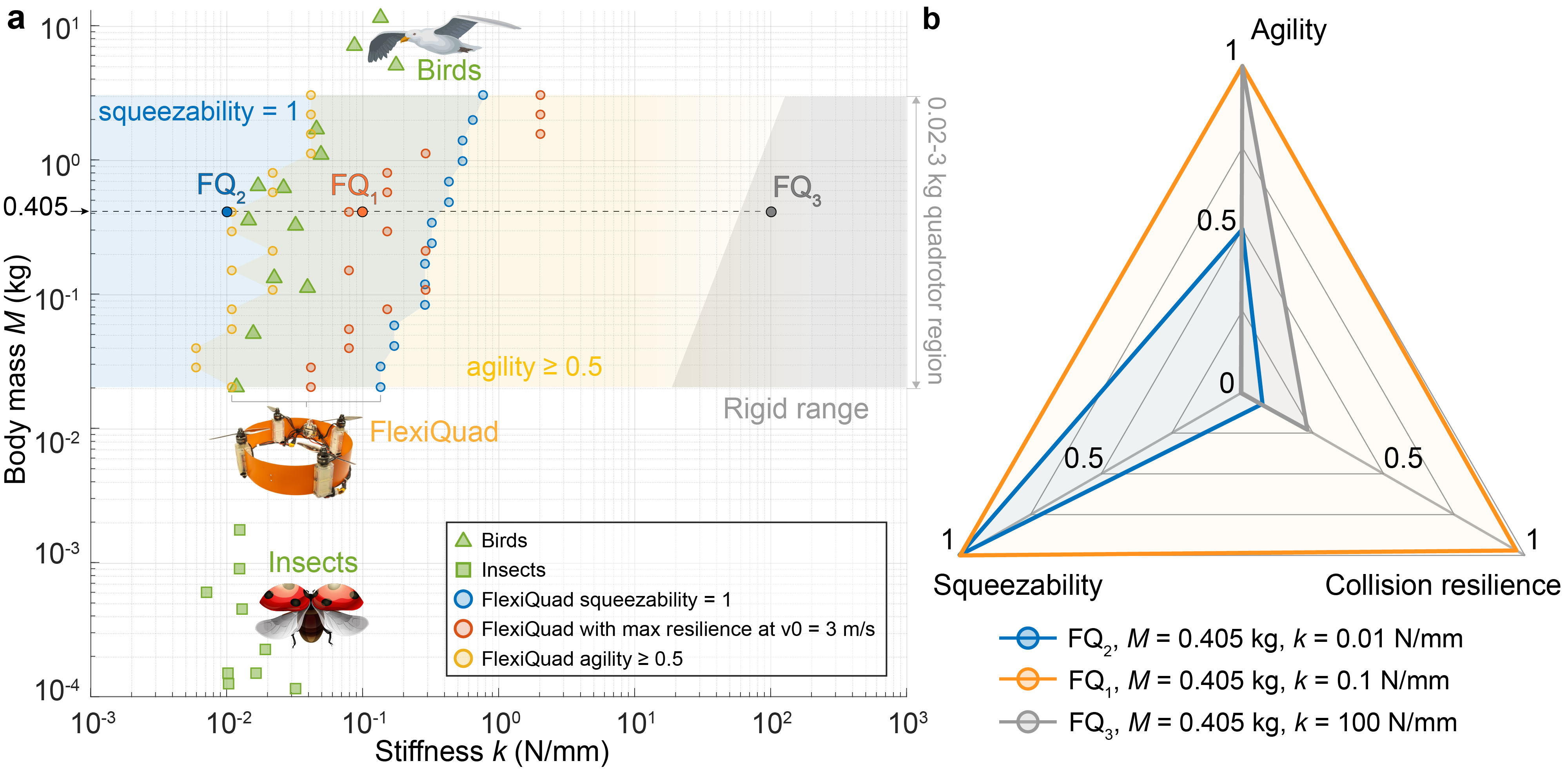
Abstract: Natural flyers use soft wings to seamlessly enable a wide range of flight behaviours, including agile manoeuvres, squeezing through narrow passageways, and withstanding collisions. In contrast, conventional quadrotor designs rely on rigid frames that support agile flight but inherently limit collision resilience and squeezability, thereby constraining flight capabilities in cluttered environments. Inspired by the anisotropic stiffness and distributed mass-energy structures observed in biological organisms, we introduce FlexiQuad, a soft-frame quadrotor design approach that limits this trade-off. We demonstrate a 405-gram FlexiQuad prototype, three orders of magnitude more compliant than conventional quadrotors, yet capable of acrobatic manoeuvres with peak speeds above 80 km/h and linear and angular accelerations exceeding 3 g and 300 rad/s$2$, respectively. Analysis demonstrates it can replicate accelerations of rigid counterparts up to a thrust-to-weight ratio of 8. Simultaneously, FlexiQuad exhibits fourfold higher collision resilience, surviving frontal impacts at 5 m/s without damage and reducing destabilising forces in glancing collisions by a factor of 39. Its frame can fully compress, enabling flight through gaps as narrow as 70% of its nominal width. Our analysis identifies an optimal structural softness range, from 0.006 to 0.77 N/mm, comparable to that of natural flyers' wings, whereby agility, squeezability, and collision resilience are jointly achieved for FlexiQuad models from 20 to 3000 grams. FlexiQuad expands hovering drone capabilities in complex environments, enabling robust physical interactions without compromising flight performance.

Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Explain it Like I'm 14
Overview
This paper introduces a new kind of drone called FlexiQuad. Unlike typical drones with stiff, hard frames, FlexiQuad has a soft, ring-shaped frame inspired by animal wings. The goal is to make a drone that is fast and agile, can squeeze through narrow gaps, and can survive bumps and crashes—without adding heavy, complicated folding parts.
What questions does the paper try to answer?
The researchers wanted to know:
- Can a soft-framed quadrotor be as agile and fast as a regular rigid drone?
- Can it safely handle collisions by bending instead of breaking?
- Can it actively or passively squeeze itself smaller to fly through tight spaces?
- Is there a “sweet spot” for how soft the frame should be to get all three benefits at once?
How did they approach the problem?
They combined ideas from biology and engineering:
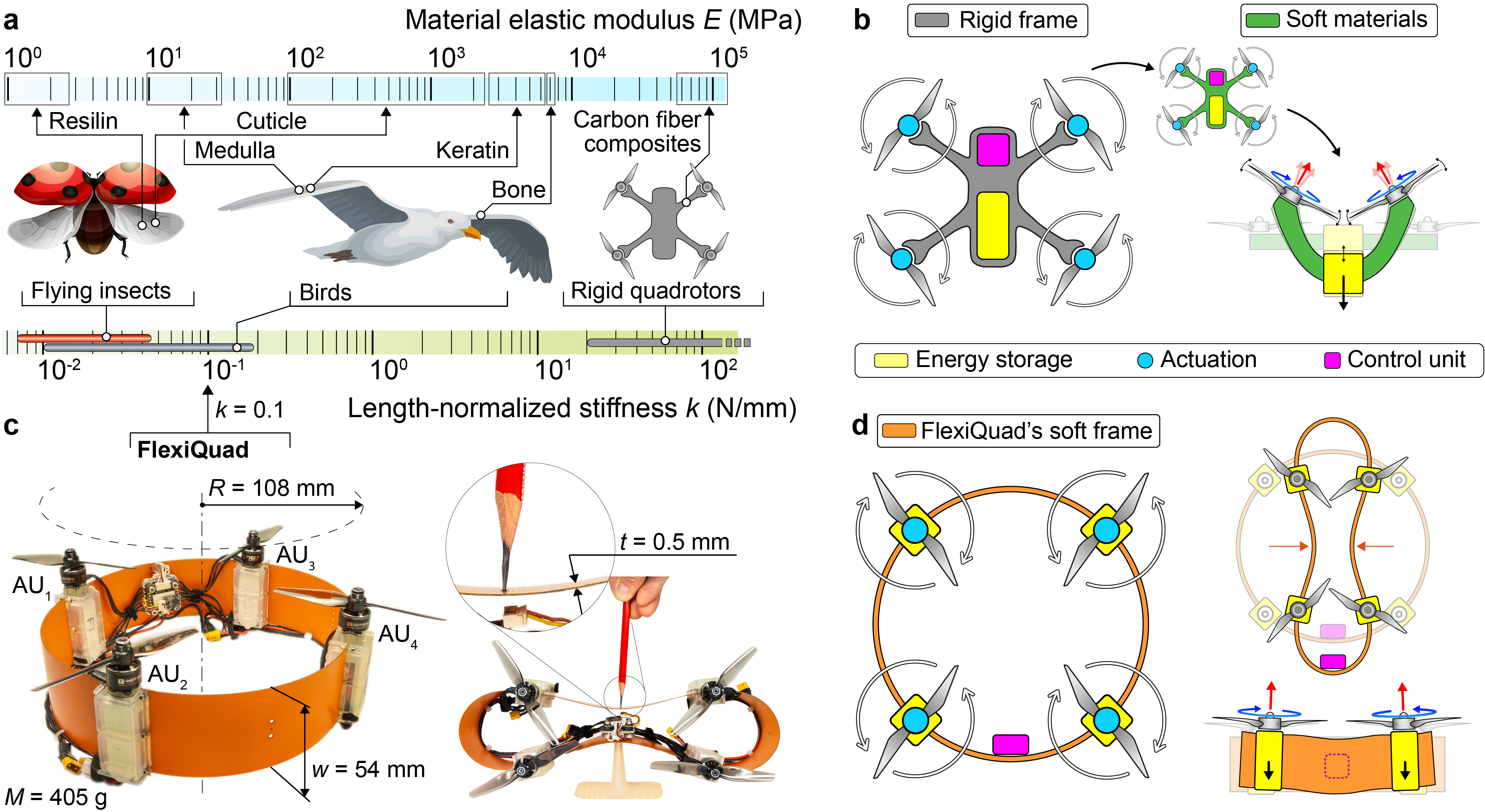
- Bioinspiration: In nature, birds and insects have wings that are stiff in some directions and soft in others. This lets them change shape, fly efficiently, and survive collisions. FlexiQuad copies this idea by making its frame stiff enough to hold the motors steady but soft enough to compress sideways.
- Anisotropic stiffness: “Anisotropic” means “stiffness depends on direction.” FlexiQuad is much easier to squish inward (sideways) than to bend upward/downward (where the motors push air).
- Distributed mass: Instead of putting the battery in the middle, FlexiQuad spreads its batteries around the ring under each motor. This reduces harmful bending and keeps the propellers pointed correctly.
Methods in simple terms:
- Building and testing: They made a 405-gram prototype and flew it aggressively, testing speed and acceleration.
- Computer simulations: They ran “virtual crash tests” and “virtual sprints” to see how different designs behave. This is like trying many versions in a safe digital lab before making them.
- Squeezing mechanism: They added a small servo motor with a string-and-pulley to actively tighten the ring, so the drone could shrink for narrow passages.
- Scaling study: They checked if the idea works for very small to larger drones (from about 20 grams up to 3 kilograms).
Key terms explained:
- Quadrotor: A drone with four rotors (propellers).
- Thrust-to-weight ratio (TWR): How powerful the drone is compared to its weight. Higher TWR means stronger acceleration.
- Agility: How quickly a drone can change speed and direction.
- Squeezability: How much the drone can compress its width to fit through tight spaces.
- Collision resilience: How well it can handle impacts without breaking or losing control.
What did they find, and why is it important?
FlexiQuad achieved three things at the same time—agility, squeezability, and collision resilience—which is rare for drones.
Here are the headline results:
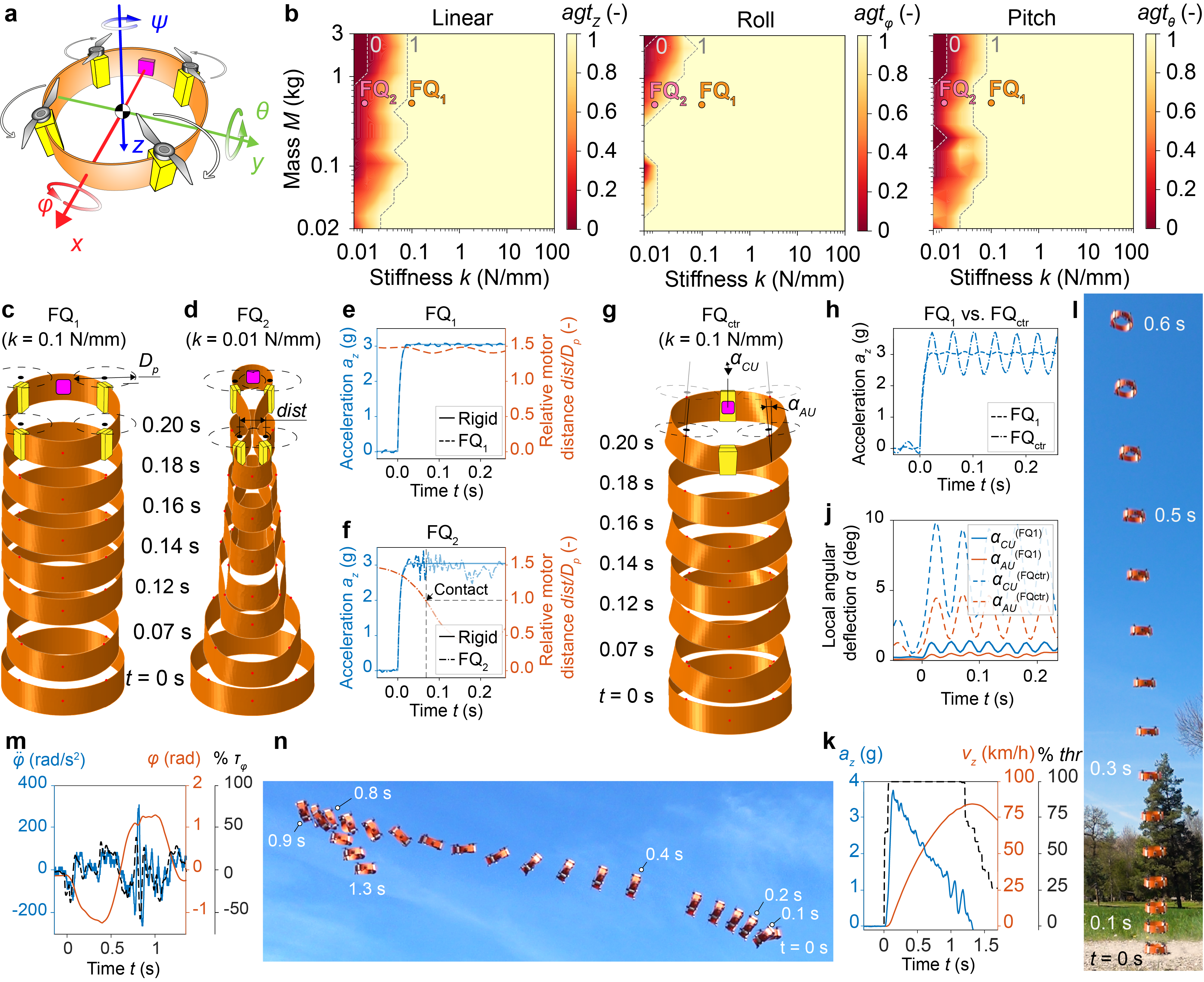
- Agility: Even though the frame is soft (about 1,000 times more compliant than normal), the drone did acrobatic manoeuvres, reached speeds over 80 km/h, and hit accelerations over 3 g (three times the force of gravity).
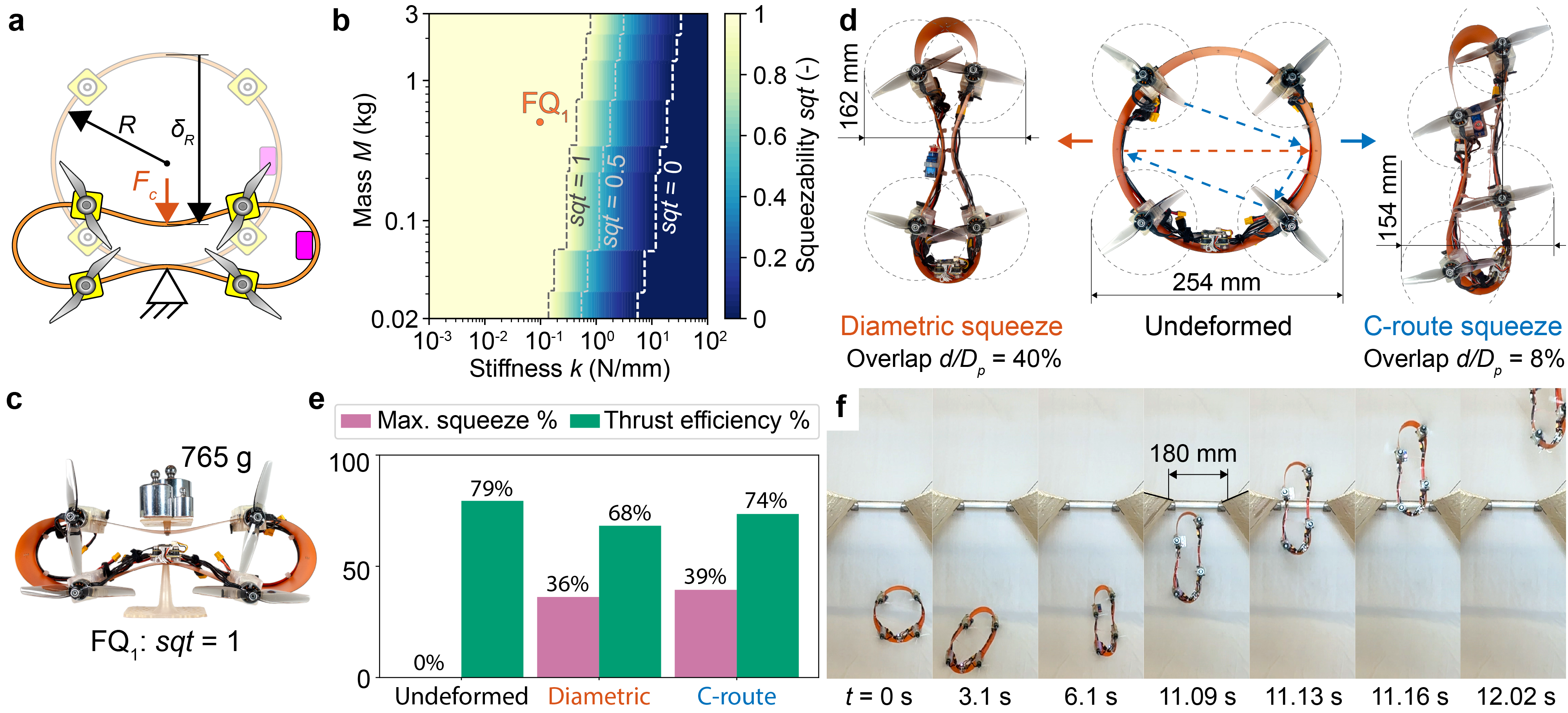
- Squeezability: The frame can fully compress. In flight, the drone flew through gaps that were just 70% of its normal width. It could also squeeze to “grasp” and carry a small object without a special gripper.
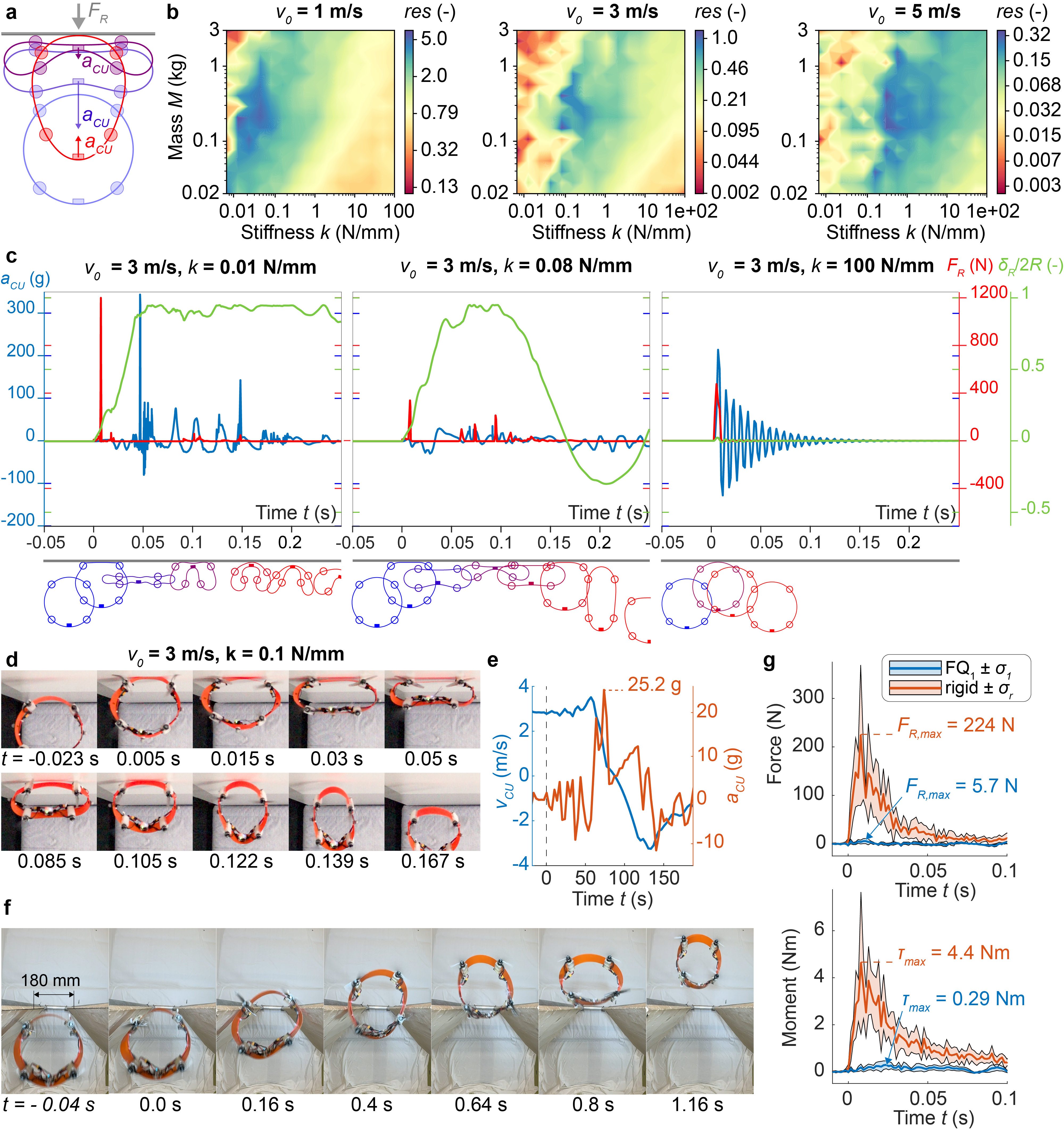
- Collision resilience: It survived frontal impacts at up to 5 m/s without damage. During glancing hits (like tapping a branch), the soft frame reduced sudden forces by up to 39 times, making it less likely to destabilize or break propellers.
- Optimal softness: They found an ideal stiffness range (0.006 to 0.77 N/mm) that balances speed, squeezing, and crash safety. This range is similar to the stiffness found in natural wings.
Why this matters:
- Regular rigid drones are fast but fragile and bulky. FlexiQuad shows you can have speed and control plus the ability to squeeze through tight spaces and survive bumps—making drones more useful in the real world (forests, ruins, tunnels, cluttered buildings).
What could this change in the future?
FlexiQuad opens doors for drones that physically interact with the world:
- Safer navigation in cluttered places: Think forest search-and-rescue, inspecting tight pipelines, exploring collapsed buildings, or industrial sites with narrow gaps.
- Less damage from accidents: The soft frame absorbs energy, protecting parts and lowering repair costs.
- New behaviors: Drones might deliberately “bump” to reorient quickly, squeeze to slip through tight openings, or gently press against surfaces to collect samples.
The next challenges are in sensing and control: if the drone can “feel” its shape in real time (shape sensing) and adapt its controller to the bending of the frame, it could fly autonomously even more reliably. The paper suggests co-designing the “body” and the “brain” of the drone together—using smart algorithms that evolve both the shape and the control rules—to get the best performance for specific tasks.
In short, FlexiQuad shows that being soft doesn’t mean being weak. With the right design, softness can make drones more capable, safer, and better suited for complex environments.
Knowledge Gaps
Knowledge gaps, limitations, and open questions
The paper leaves several unresolved issues that future work could address to validate, generalize, and operationalize FlexiQuad systems.
- Scaling validation is largely simulated: only a single 405 g prototype is tested, while claims spanning kg and N/mm rely on FE and analytical models; physical prototypes at both ends of the mass/stiffness range are needed to confirm agility, squeezability, and collision resilience.
- Collision resilience is not characterized under repeated impacts: fatigue, cumulative damage, wear of joints/screws, FR-4 microcracking, and resin housings under cyclic compression remain untested.
- Impact scenarios are limited: resilience is evaluated mainly for frontal collisions with a planar obstacle; oblique/glancing collisions across angles, deformable obstacles (foliage, nets), and irregular geometries were not systematically studied.
- Electronics survivability threshold is assumed (50 g) rather than empirically derived: component-specific shock limits, damage probabilities, and failure modes under different pulse durations are not established.
- FE collision modeling details are underspecified: contact modeling (friction, restitution), damping, and rate-dependent material behavior are not fully described or validated against high-speed impact data.
- Aerodynamic effects in squeezed configurations are only partially quantified: thrust efficiency is measured statically with overlapping discs, but wake interference, control authority, and efficiency in forward flight under squeeze are not modeled or validated.
- Energy efficiency and endurance are not reported: no quantitative comparison of power consumption and flight time versus rigid frames in nominal and squeezed morphologies, including servo actuation costs and oscillation-induced losses.
- Controller design is not addressed for morphology changes: mixing matrices, gain scheduling, and stability margins under variable geometry (squeezed vs. nominal) are not developed or tested.
- Shape sensing is identified as needed but not implemented: there is no real-time reconstruction of the deformation field, sensor placement strategy (e.g., IMUs on AUs), or fusion methods to enable morphology-aware control.
- Structural mode identification is missing: dominant oscillation frequencies, mode shapes, and coupling with rotor RPM (whirl/flutter risks) are not experimentally identified, leaving controller bandwidth limits uncertain.
- Out-of-plane and in-plane stiffness anisotropy () is model-based: direct experimental measurement across designs/materials to confirm anisotropy and its robustness to manufacturing tolerances is absent.
- Material/model generality is unproven: results rely on FR-4 woven laminate; how , , fatigue, and collision resilience transfer to alternative composites, layups, and thicknesses is unknown.
- Jointed ring construction could be a weak point: stress concentrations at screw joints and segment interfaces under impact/squeeze are not analyzed or lifespan-tested.
- Distributed energy mass introduces system-level challenges: multi-battery balancing, BMS integration, safety under deformation, connector/wire strain, and thermal management are not treated.
- Payload effects are underexplored: off-axis or asymmetric payloads, gimbals/cameras, and their impact on stiffness, oscillations, and agility are not characterized; maximum payload and grasp reliability via squeezability are not bounded.
- Yaw agility is minimally analyzed: the assumption that aggressive trajectories don’t require high yaw accelerations leaves yaw authority, coupling, and performance under rapid heading changes unquantified.
- Glancing collision protection for propellers is partial: while loads are reduced (up to 39×), blade damage probability, ducted/guarded prop trade-offs, and safe operation near humans/assets are not evaluated.
- Regulatory and safety considerations for deliberate impacts are unaddressed: operational protocols, risk mitigation, and compliance implications of using collision resilience for navigation are not discussed.
- Environmental robustness is unclear: performance in wind gusts, rain, dust, temperature/humidity extremes, and the reliability of strings/pulleys and resin parts under outdoor conditions are not tested.
- Squeezing actuation reliability and control are not validated: spool friction, string wear, failure modes, re-expansion dynamics, and closed-loop squeeze control (position/force) are not demonstrated.
- Path planning and decision-making for squeeze usage are missing: algorithms to choose when/how much to squeeze, trade-offs with efficiency, and integration with perception in cluttered spaces are not presented.
- Impact recovery is not shown in closed loop: post-collision stabilization, controller robustness to impact-induced oscillations, and autonomous recovery behavior are not experimentally validated.
- Motor/prop scaling laws are empirical with limited scope: the regressions are built from available BLDCMs/props; their predictive validity for extreme TWRs, unusual prop geometries, and forward-flight regimes is untested.
- Reproducibility resources are limited: FE models, controller parameters, and detailed experimental protocols are not provided, constraining independent replication and benchmarking.
Practical Applications
Immediate Applications
The following bullets highlight concrete, deployable use cases that can leverage FlexiQuad’s demonstrated properties (squeezability, collision resilience, and rigid-like agility) with existing components and manual or semi-autonomous control.
- Collision-resilient pilot training and FPV racing drones (Robotics/Consumer)
- What: Use soft-ring frames to drastically reduce damage and downtime from crashes during training and racing.
- Tools/products/workflows: FlexiQuad frame kits; distributed-battery actuation units (AUs); optional “C-route” squeeze servo module for gap runs.
- Assumptions/dependencies: Baseline thrust-to-weight ≥ 3–4; stiffness in the 0.006–0.77 N/mm range; pilot or teleoperation; indoor or low-wind environments.
- Cinematography through clutter and narrow gaps (Media/Film)
- What: Manual “squeeze-and-fly” to traverse windows, vehicle interiors, scaffolding, and forest openings with lower breakage risk.
- Tools/products/workflows: Servo-driven string-and-pulley squeeze add-on; shot planning that incorporates temporary thrust efficiency drop when overlapping propellers.
- Assumptions/dependencies: Human pilot; acceptance of a 5–10% thrust efficiency trade-off when squeezed; short-duration gap maneuvers.
- Indoor warehouse inventory scanning with safe contact (Logistics/Retail)
- What: Bump-tolerant flight between racks, light brushing of barcodes/RFID tags, and passive gap compression between shelves.
- Tools/products/workflows: Teleop flight; contact-aware scanning routes; lightweight barcode/RFID modules mounted on AUs.
- Assumptions/dependencies: GPS-denied indoor operation; low-speed flight; safety protocols for human co-presence.
- Contact-friendly infrastructure inspection (Construction/Energy)
- What: Under-bridge, truss, and rebar inspection with glancing contacts; reduced risk of propeller damage and destabilization.
- Tools/products/workflows: Soft ring retrofit; short-contact visual/NDT probes; mission plans that permit safe brushing impacts.
- Assumptions/dependencies: Mild wind; local permissions; acceptance of deliberate low-energy contact.
- Under-canopy ecological monitoring (Environmental Science)
- What: Navigate shrubs/branches with passive compression and collision resilience to collect imagery and micro-sensor data.
- Tools/products/workflows: Small FlexiQuad platforms with distributed mass; low-speed manual flight; environmental data loggers.
- Assumptions/dependencies: Careful wildlife protocols; limited payloads; pilots trained for cluttered natural environments.
- Micro first-aid kit delivery and squeeze-to-grasp pickup (Public Safety/Healthcare)
- What: Demonstrated ability to grasp and carry small kits using frame squeeze, without additional grippers.
- Tools/products/workflows: Squeeze module; standardized kit geometry compatible with the ring’s compression envelope.
- Assumptions/dependencies: Light payloads; pilot operation; local regulatory acceptance for indoor/close-proximity flight.
- Safer consumer indoor drones (Consumer/Daily life)
- What: Hobby drones less likely to break or injure on contact; practical for apartments and offices.
- Tools/products/workflows: Soft ring consumer frame; prop guards; “contact-allowed” flight modes for low speeds.
- Assumptions/dependencies: Compliance with local rules; noise tolerances; charge/discharge safety for distributed batteries.
- Education: soft aerial robotics lab kits (Education)
- What: Teach anisotropic stiffness, distributed mass, and morphology-aware design with hands-on platforms.
- Tools/products/workflows: Classroom kits; FE-based stiffness/agility worksheets; controlled collision experiments.
- Assumptions/dependencies: Institutional safety SOPs; access to 3D printers or composite strips.
- Academic testbed for deformable-body control (Academia/Software)
- What: Use FlexiQuad to study morphology-aware control, oscillation filtering, and sensor fusion in deformable platforms.
- Tools/products/workflows: Open CAD/FE models; IMU logs; servo squeeze actuation; benchmark scenarios (gaps, glancing collisions).
- Assumptions/dependencies: Research lab infrastructure; standard autopilot stacks with data logging.
- Policy pilots for indoor safety classification (Policy/Regulation)
- What: Use measured reductions in peak impact accelerations to inform risk assessments for close-proximity operations.
- Tools/products/workflows: Repeatable collision tests (e.g., 3–5 m/s frontal and glancing impacts) to establish a resilience index.
- Assumptions/dependencies: Cooperation with regulators; standardized test fixtures and reporting.
Long-Term Applications
The following bullets reflect use cases that require further research, scaling, autonomy, standardization, or ruggedization beyond the current prototype stage.
- Autonomous morphology-aware flight and shape sensing (Software/Robotics)
- What: Real-time estimation of frame deformation to adapt control, filtering, and path planning.
- Tools/products/workflows: Embedded strain/soft sensors; IMU fusion; morphology-aware controllers; ROS/autopilot plugins.
- Assumptions/dependencies: Robust shape reconstruction; low-latency compute; controller co-design with morphology.
- Swarm exploration of collapsed buildings or mines (Public Safety)
- What: Multi-robot teams that tolerate collisions, squeeze through debris, and share maps in GPS-denied spaces.
- Tools/products/workflows: Swarm coordination; onboard SLAM; resilient communication; mission-specific squeeze policies.
- Assumptions/dependencies: Autonomy at low visibility; interference tolerance; safety approvals for emergency deployments.
- Urban package delivery through constrained architecture (Logistics/Commerce)
- What: Navigate gates, scaffolds, and semi-enclosed routes using squeeze and contact-tolerant behaviors.
- Tools/products/workflows: Route planners that incorporate squeeze feasibility; contact-safe vehicle shells; weatherized frames.
- Assumptions/dependencies: Payload scaling to kilograms; certification for contact-permissive navigation; endurance and noise constraints.
- Industrial NDT with intentional soft contact (Energy/Infrastructure)
- What: Press ultrasonic or eddy-current probes against surfaces; slide along pipes/cables with reduced destabilization.
- Tools/products/workflows: Soft-contact end-effectors mounted on AUs; force/torque sensing; repeatable contact trajectories.
- Assumptions/dependencies: Compliance tuning; consistent contact forces; regulatory acceptance of contact-based inspection.
- Hospital logistics (Healthcare)
- What: Safe indoor deliveries of meds/samples; robust to incidental bumps in corridors and crowded spaces.
- Tools/products/workflows: Hospital-grade enclosures; sanitation workflows; fleet management.
- Assumptions/dependencies: Infection control compliance; low noise; patient safety policies; autonomy in GPS-denied settings.
- Under-canopy crop monitoring and micro-spraying (Agriculture)
- What: Navigate dense foliage to inspect or deliver small volumes with minimal plant damage.
- Tools/products/workflows: Under-leaf imaging; variable squeeze planning; micro-spray modules.
- Assumptions/dependencies: Payload/endurance increases; chemical safety; environmental conditions (wind, dust).
- Body–brain co-optimization with evolutionary design (Academia/Software/Robotics)
- What: Joint optimization of morphology (stiffness, mass distribution) and control for task-specific performance.
- Tools/products/workflows: Evolutionary algorithms integrated with high-fidelity FE/dynamic models; automated fabrication loops.
- Assumptions/dependencies: Reliable simulation-to-reality transfer; sensor-rich prototypes; manufacturing repeatability.
- Standards for collision resilience and squeeze performance (Policy/Standardization)
- What: Certification frameworks for drones operating in close proximity to people and infrastructure.
- Tools/products/workflows: Metrics like resilience index (inverse peak g at CU), squeezability index (sqt), validated test protocols.
- Assumptions/dependencies: Industry consensus; accredited test labs; integration into aviation and workplace safety norms.
- Powerline/substation inspections with soft-contact behaviors (Energy)
- What: Intentional brushing, wire-following, and gap traversal with reduced destabilizing moments.
- Tools/products/workflows: EMI-hardened electronics; contact-safe prop shells; redundancy for high-voltage environments.
- Assumptions/dependencies: Electrical safety certification; weatherproofing; pilot/autonomy in windy conditions.
- Domestic service drones for cluttered homes (Consumer)
- What: Safe navigation around furniture, narrow passages; gentle nudging to move light objects.
- Tools/products/workflows: Home-safe autonomy, squeeze-aware planners; user safety modes; object interaction policies.
- Assumptions/dependencies: Reliable indoor perception; rigorous safety locks; noise and privacy standards.
- Reconnaissance in complex urban terrain (Defense/Public Safety)
- What: Gap traversal, contact-tolerant maneuvers, and quiet operation behind obstacles.
- Tools/products/workflows: Ruggedized frames; low-acoustic propellers; secure comms; autonomous mission planning.
- Assumptions/dependencies: Environmental robustness (dust, rain, temperature); regulatory frameworks.
- Cave and forest microhabitat mapping (Environmental Science)
- What: Persistent exploration in tight, fragile environments with lower risk of damage upon contact.
- Tools/products/workflows: Long-range autonomy; low-light imaging; squeeze-aware trajectories.
- Assumptions/dependencies: Extended endurance; multi-session mapping; minimal disturbance requirements.
- Warehouse automation with squeeze-aware autonomy (Logistics)
- What: Full autonomy for inventory checks between narrow bay gaps and complex shelf layouts.
- Tools/products/workflows: Perception models that infer squeeze feasibility; dynamic gap selection; fleet coordination.
- Assumptions/dependencies: High-reliability autonomy; integration with WMS/ERP; safety interlocks for human co-working.
- Path-planning and simulation software that exploits squeezability and “deliberate contact” (Software)
- What: Toolchains that incorporate deformation constraints, contact models, and agility limits into planning.
- Tools/products/workflows: ROS/ArduPilot plugins; morphology-informed planners; digital twins with FE-backed dynamics.
- Assumptions/dependencies: Validated models across scales; real-time computation; standardized APIs.
- Manufacturing ecosystems for modular distributed AUs (Industry/Robotics)
- What: Production of standardized actuation/battery modules compatible with soft ring frames and different sizes.
- Tools/products/workflows: Thermal management and BMS for distributed packs; quick-release AU mounts; compliance tuning kits.
- Assumptions/dependencies: Supply chain standardization; safety certifications for distributed energy storage.
Cross-cutting assumptions and dependencies
- Performance hinges on stiffness within the 0.006–0.77 N/mm window and adequate thrust-to-weight ratios (≥ 4.5 for high agility; ≥ 2 for general utility).
- Squeezing reduces thrust efficiency when propellers overlap; C-routing mitigates but does not eliminate losses.
- Distributed battery mass under each rotor is critical to suppress detrimental oscillations and preserve control bandwidth.
- Autonomy in clutter will require shape sensing, morphology-aware controllers, and planners that explicitly reason about deformable geometry and deliberate contact.
- Regulatory acceptance depends on standardized collision resilience tests and documented reductions in peak impact acceleration.
- Scaling to heavier payloads and outdoor operations demands ruggedization (weather, EMI), endurance improvements, and reliability in wind.
Glossary
- Abaqus 2024: Commercial finite-element analysis software used to build and solve structural models. "we developed a 3D finite-element model of FlexiQuad in Abaqus 2024 (Dassault Systèmes)."
- Actuation unit (AU): A modular unit that combines energy storage and propulsion, mounted around the ring airframe. "indication of its radius (), frame strips width (), mass (), stiffness (), and actuation units (AUs)."
- Agility index (agt): A dimensionless ratio comparing FlexiQuad’s maximum admissible acceleration to that of a rigid twin for a given manoeuvre. "we determined agility indices () for a selected manoeuvre"
- Anisotropic stiffness: Direction-dependent stiffness; the structure resists deformation differently along different axes. "Inspired by the anisotropic stiffness and distributed mass-energy structures observed in biological organisms"
- Aspect ratio (high-aspect-ratio): A geometry with one dimension much larger than another (e.g., width vs. thickness), affecting flexibility and stiffness. "The airframe uses a high-aspect-ratio fibreglass strip"
- Beam model: An analytical structural model that treats components as beams to predict bending and deflection under load. "Using an analytical beam model, we quantified across stiffness and mass variations"
- Bioinspired: Designed by taking principles from biological systems to improve engineering performance. "FlexiQuad: a bioinspired class of soft quadrotors."
- Brushless direct-current motor (BLDCM): An efficient electric motor commonly used in multirotor propulsion. "Commercial multirotors within this scale range typically employ brushless direct-current motors (BLDCMs)."
- Cantilevered arms: Arms fixed at one end and free at the other, carrying loads such as rotors. "a rigid, cross-shaped airframe whose four cantilevered arms carry the rotors"
- Cantilevered beam model: Linearised beam theory describing the deflection of a cantilever under an applied load. "applying the linearised cantilevered beam model:"
- Collision resilience: The capability to withstand impacts while maintaining structural integrity and functionality. "Collision resilience defines an aerial systemâs ability to endure collisions with obstacles while preserving its structural integrity and operational functionality."
- Compliance (in-plane): The ease with which a structure deforms within its plane, aiding morphing and energy absorption. "while their in-plane compliance enables a continuous wing morphing"
- Control unit (CU): The central electronics/flight controller stack regarded as the most impact-sensitive component. "the peak acceleration experienced by the control unit (CU)"
- Distributed energy mass: Locating energy storage (e.g., batteries) across the structure rather than centrally to reduce detrimental bending. "functional stiffness anisotropy~\cite{liu2020structural} and distributed energy mass~\cite{aubin2022towards,burden2024animals}."
- Elastic modulus: A material property (Young’s modulus) quantifying resistance to elastic deformation. "Elastic moduli ranges extracted from experimental values in the literature"
- Euler elastica: The mathematical description of the shape of an elastic rod or strip under loading. "analytically modelled by solving the planar Euler elastica."
- Finite element analysis (FEA): A numerical method for simulating and analysing complex mechanical behaviour. "Through finite element analysis, we evaluated FlexiQuadâs collision resilience"
- Flexural modulus: The effective modulus governing bending stiffness in a laminate or composite. "The effective flexural modulus () corresponds to the longitudinal modulus () of the orthotropic laminate."
- Flexural stiffness (EI): The product of a material’s modulus and the cross-section’s second moment of area, determining bending resistance. "The stiffness of these propulsors is commonly measured as mean flexural stiffness ()"
- Glancing collisions: Non-frontal impacts where parts (e.g., rotor arms or propellers) graze obstacles, causing destabilising loads. "Beyond full-body impacts, glancing collisions involving rotor arms or propellers are common during high-speed navigation in cluttered environments."
- Inertial measurement unit (IMU): A sensor that measures accelerations and angular rates used for flight control. "these oscillations would appear as disturbances read by the inertial measurement unit at the CU"
- In-plane compression: Loading that reduces the structure’s dimensions within its plane, such as diametric squeezing of the ring. "the frame exhibits low resistance to in-plane compression"
- Kinematic couplings: Constraints that tie the motion of points or regions to represent rigid components within a deformable model. "was represented by kinematic couplings between control points at their airframe locations and corresponding connection regions."
- Longitudinal modulus (E11): The stiffness of an orthotropic laminate along the primary fiber direction. "corresponds to the longitudinal modulus () of the orthotropic laminate."
- Moments of inertia: Measures of mass distribution relative to axes that determine rotational dynamics. "FlexiQuad moments of inertia about body axes X (), Y (), and Z ()"
- Morphing mechanisms: Systems that actively change geometry to reduce footprint or adapt shape during flight. "Active folding or morphing mechanisms can reduce the footprint to fly through gaps"
- Non-dimensional stiffness constant: A dimensionless parameter characterising stiffness independent of material units or scale. "Here, is a non-dimensional stiffness constant, which arises solely from the problemâs geometry"
- Non-dimensionalised Euler elastica: The Euler elastica expressed with scaled, unitless variables to generalise behaviour. "we solved the non-dimensionalised Euler elastica for an initially circular beam"
- Normalised stiffness (k): A defined linear stiffness equal to applied force divided by displacement under specified conditions. "we define the normalised stiffness as the ratio of applied force to the resulting displacement "
- Orthotropic laminate: A composite material with direction-dependent properties along principal axes. "The orthotropic formulation applies to single-ply, balanced woven laminates such as the selected FR-4 glass-fibre composite."
- Out-of-plane rigidity: Resistance to deformation perpendicular to the structure’s plane, important for thrust-bearing loads. "FlexiQuad retains sufficient out-of-plane rigidity owing to its anisotropic stiffness"
- Out-of-plane stiffness (k_perp): Defined vertical stiffness that governs resistance to thrust-aligned loads and torques. "Whereas quantifies the in-plane stiffness, functional for squeezing and resilience, out-of-plane stiffness () governs resistance to thrust impulses, roll and pitch torque, and aerodynamic drag on the airframe."
- Power law scaling: A relationship where one quantity varies as another raised to a fixed exponent. "equal levels follow an approximate scaling power law of "
- Principal moment of inertia: The moment of inertia about a principal axis (e.g., a propeller’s spin axis). "J_{p,33} the propellerâs principal moment of inertia about its spinning axis"
- Propulsive efficiency: The effectiveness with which a system converts power into thrust or forward motion. "Propulsive efficiency likely underlies the convergent evolution of powered winged flight in birds, insects, and bats"
- Resilin: A rubber-like protein in insect wings that provides highly elastic joints. "resilin-rich tissues in insect wing folds and tendons"
- S4R shell elements: Four-node, reduced integration shell elements used in Abaqus for thin structures. "The ring-shaped airframe was modelled using S4R shell elements with rectangular cross-sections"
- Sclerotised cuticles: Hardened, chitin-rich structures in insect wings that provide rigidity. "and sclerotised cuticles\cite{vincent2004design,combes2003flexuralI}."
- Squeezability: The capability of the airframe to compress and reduce its width to pass through narrow gaps. "a property we term squeezability."
- Squeezability index (sqt): A normalised metric of maximum diametric compression relative to the original diameter. "We define the squeezability index () as the maximum achievable diametric compression (), normalised by the initial airframe diameter 2"
- String-and-pulley mechanism: A simple actuation system that routes a string over pulleys to actively deform the frame. "single-actuator string-and-pulley mechanism."
- Stiffness anisotropy index: The ratio of out-of-plane to in-plane stiffness quantifying directional compliance. "we identified a stiffness anisotropy index 2.23"
- Thin-walled: Having a wall thickness much smaller than other dimensions, influencing flexibility and weight. "FlexiQuad consists of a thin-walled, ring-shaped, soft airframe"
- Thrust-to-weight ratio (TWR): The ratio of available thrust to vehicle weight, a key determinant of agility. "thrust-to-weight ratio (TWR)"
- Two-point bending tests: Experimental procedures to measure flexural stiffness by loading a specimen at two points. "In that study, values of were measured with two-point bending tests on wings"
- Ultimate strength: The maximum stress a material can withstand before failure. "reach the ultimate strength of the material ()"
- Yaw manoeuvres: Rotations about the vertical axis; analysed separately due to different agility demands. "Yaw () manoeuvres were analysed separately as agile trajectories donât require aggressive yaw accelerations"
Collections
Sign up for free to add this paper to one or more collections.