- The paper introduces a metamorphic UAV design that combines rotary and fixed-wing modes using a modular, folding wing system.
- It employs a segmented, nonlinear aerodynamic model in Simulink that captures localized force distributions and actuator effects.
- Simulation results validate stable hover and cruise maneuvers, offering insights for advanced control and real-world UAV deployment.
Introduction and Motivation
The paper presents MetaMorpher, a metamorphic UAV engineered for dual-mode flight—vertical takeoff, hovering, and efficient fixed-wing cruising. This design advances prior spincopter architectures by implementing a simplified mechanical airframe, leveraging lightweight materials, and introducing modular wing-folding mechanisms. Existing research has predominantly simplified metamorphic UAVs as rigid bodies or focused on specific prototypes. The presented work distinguishes itself by offering a comprehensive nonlinear mathematical model that supports arbitrary force distributions and localized aerodynamic effects across a segmented wing structure. These innovations address critical needs in modern aerial robotics: operation in confined takeoff/landing spaces and endurance for expansive monitoring missions.
Conceptual Design and Wing Architecture
The mechanical architecture of MetaMorpher is optimized for low complexity and high versatility. The UAV achieves dual-mode flight via a foldable wing system, targeting thrust-to-weight ratios >1 and a wing loading of 5kg/m2, with the prototype calibrated to a wingspan of 70 cm and a mass of 450 g.
Wing and airfoil selection were performed using XFLR5 for quasi-static stability and aerodynamic polar generation (Figure 1).
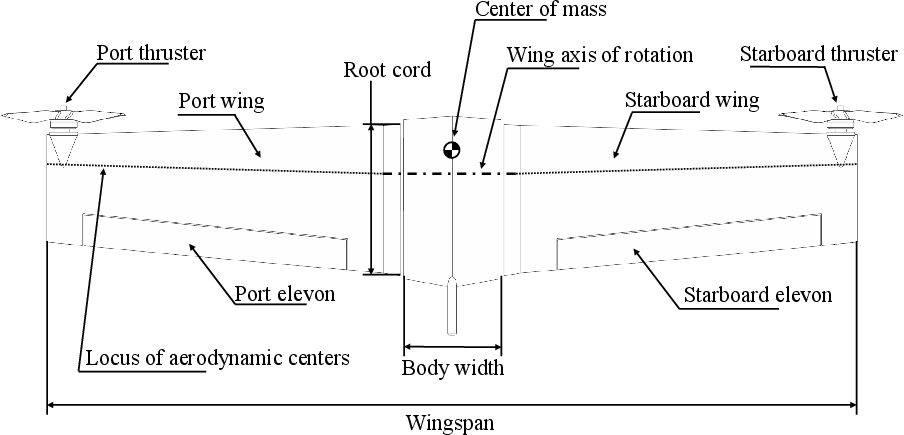
Figure 1: MetaMorpher in the XFLR5 environment, used for quasi-static stability analysis and generation of aerodynamic polars.
The cruise mode utilizes an Eppler E387 reflex camber airfoil to ensure pitch stability in a tailless flying wing, validated via prior low-Re analysis and its favorable pitching moment distribution. Hover mode implements a symmetric NACA 0010 profile for structural compatibility during morphing. These choices enable seamless transitioning between rotary and fixed-wing regimes by maintaining geometric and aerodynamic continuity.
Nonlinear Aerodynamic Modeling Framework
MetaMorpher's flight dynamics are captured via a Simulink-based 6-DoF nonlinear model structured around a segmented wing architecture (Figure 2).
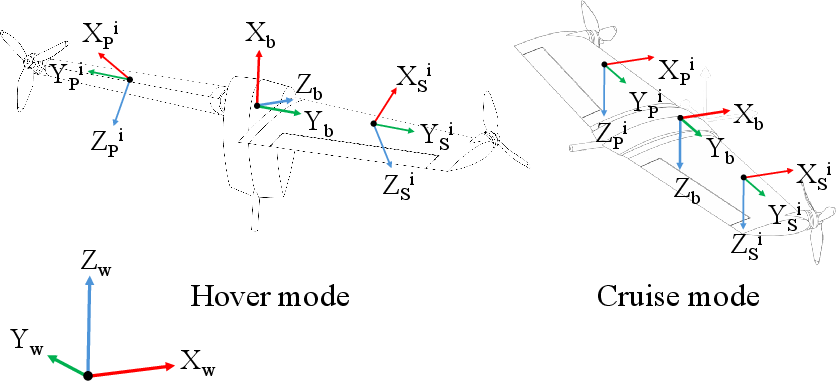
Figure 2: Reference frames for hover and cruise modes, showing body and segment frames.
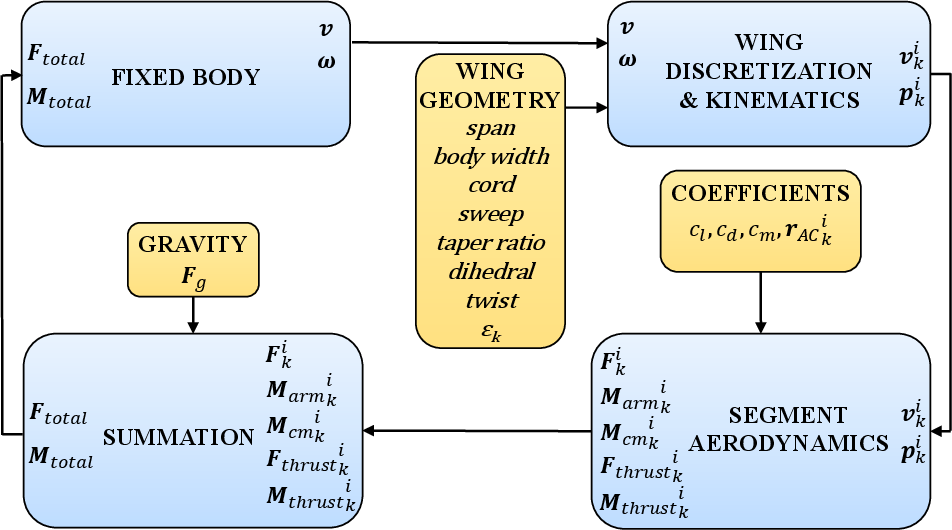
Figure 3: Block diagram of the nonlinear aerodynamic model implemented in Simulink.
Unlike legacy rigid-body approaches, the segmented model discretizes each wing into spanwise segments, each assigned individual reference frames and aerodynamic characteristics. This enables capturing non-uniform velocity distributions, variable airfoil profiles, and localized effects due to structural morphing.
Aerodynamic force and moment calculations for each segment are performed using lookup tables generated from XFLR5, parameterized by local Reynolds number and effective angle of attack. These forces and moments are transformed into the body frame for summation with thrust and gravity, ensuring total external loads are correctly propagated to the rigid-body block. The segmentation strategy is visualized in Figure 4.
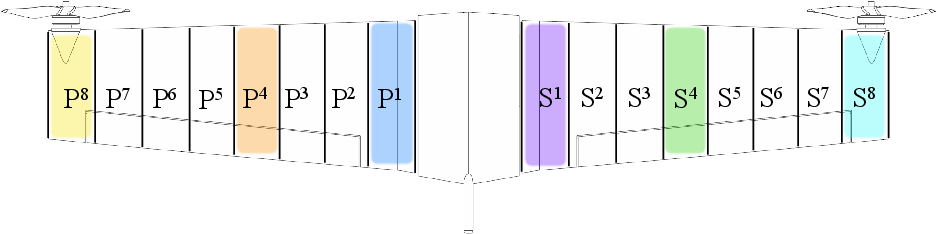
Figure 4: Wing segmentation used in the analysis; colored segments correspond to simulation results.
The mathematical formalism incorporates corrections for antisymmetric rotation kinematics during morphing, supports arbitrary segment-level actuator and thruster allocation, and models the aerodynamic center and pitching moment contributions comprehensively. Thruster-equipped segments calculate force vectors and generated moments using thrust magnitude and inclination, permitting flexible propulsion layouts.
Simulation Analysis: Hover and Cruise Regimes
System dynamics were evaluated through four simulation scenarios, encompassing both steady-state and step responses across hover and cruise modes. Open-loop actuation was employed.
Hover Mode
Spincopter-like hover dynamics were analyzed using actuator and thruster-based spin-up, with constant thrust input resulting in ground spin-up and subsequent lift-off. Distributed aerodynamic loads across segments reveal differentiated lift and drag profiles, with outer segments generating higher lift post spin-up (Figure 5, Figure 6).
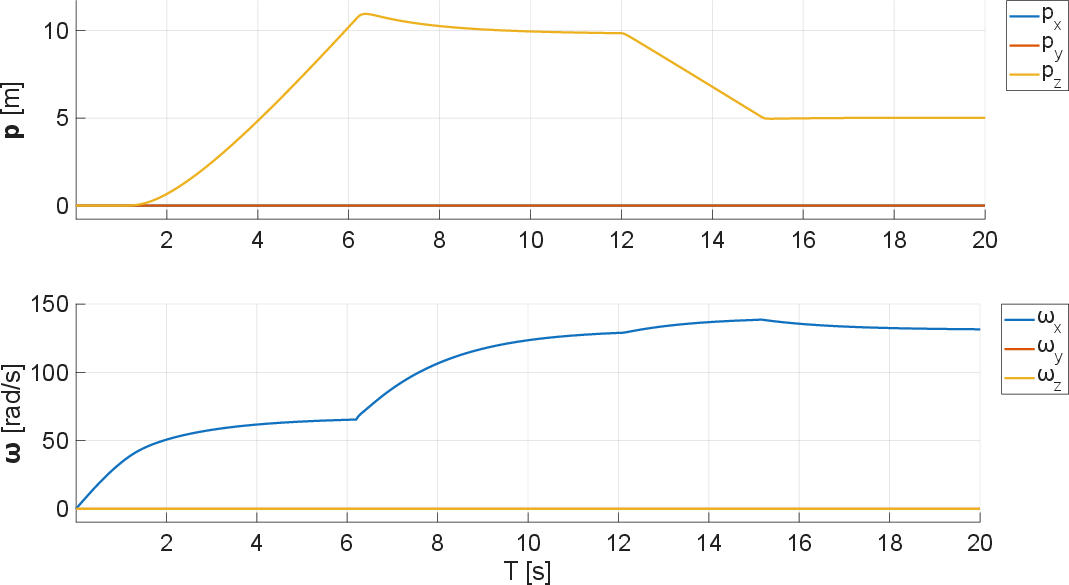
Figure 5: Hover mode with actuator control in the body frame (FB).
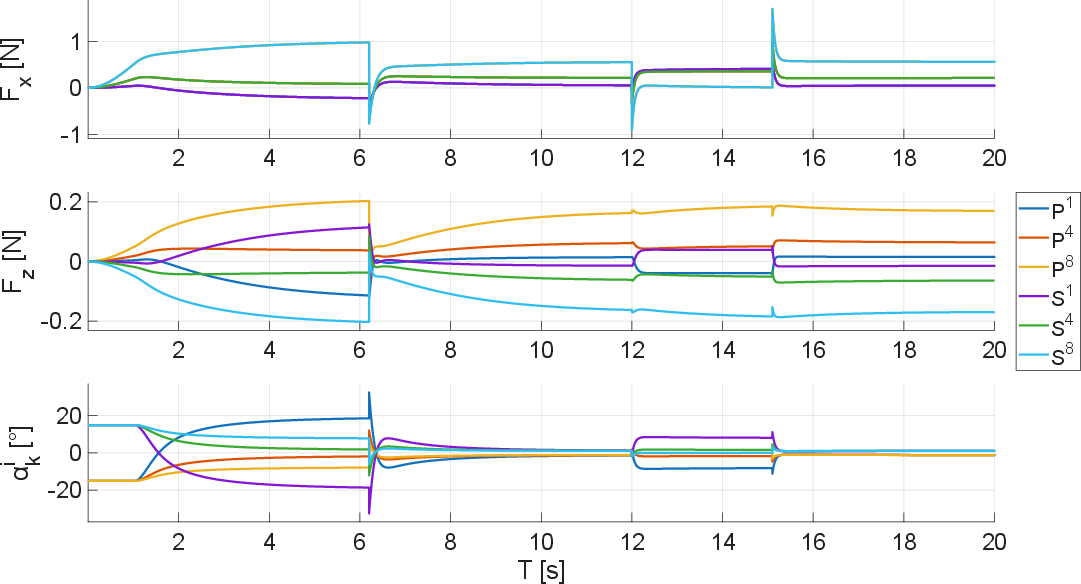
Figure 6: Hover mode with actuator control showing individual segment forces.
Hover via thruster control demonstrated similar spanwise effects; thrust magnitude modulated rotational velocity and aerodynamic load, with inner segments particularly sensitive to translational velocity during transitions (Figure 7, Figure 8).
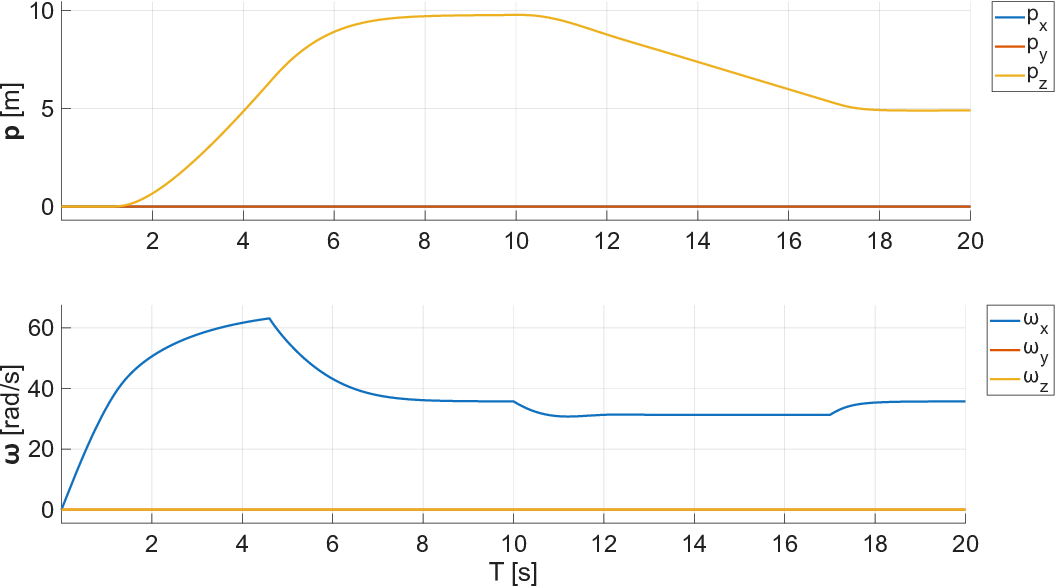
Figure 7: Hover mode with thruster control in the body frame (FB).
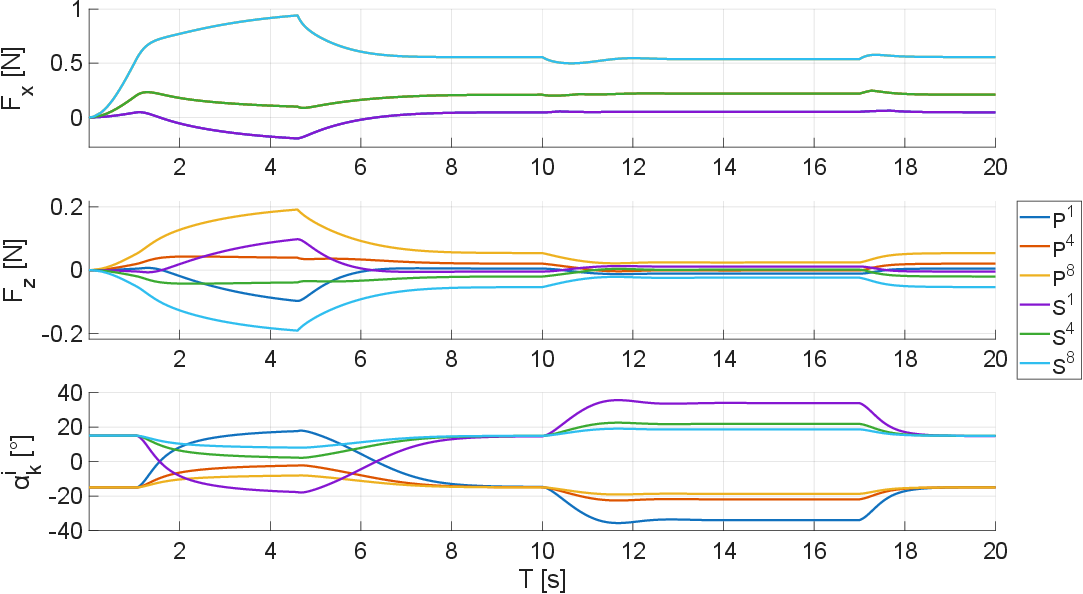
Figure 8: Hover mode with thruster control showing individual segment forces.
Cruise Mode
Cruise simulations included actuating wing joints for roll authority and varying thruster inputs for yaw control. Wing joint actuation produced asymmetric lift distributions, confirmed at the segment level (Figure 9, Figure 10).
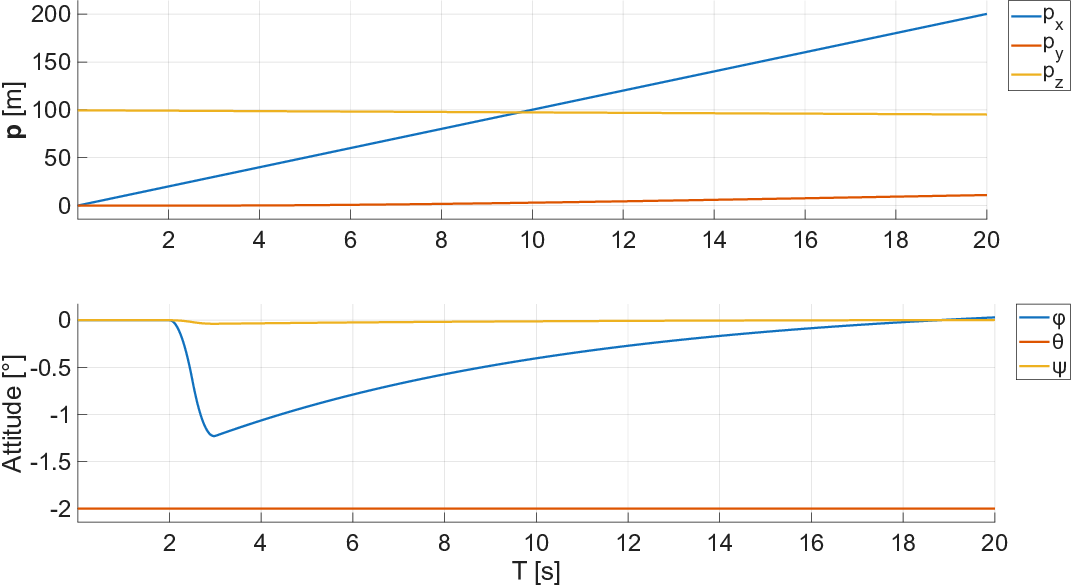
Figure 9: Cruise mode changing the roll angle with joint actuators in the body frame (FB).
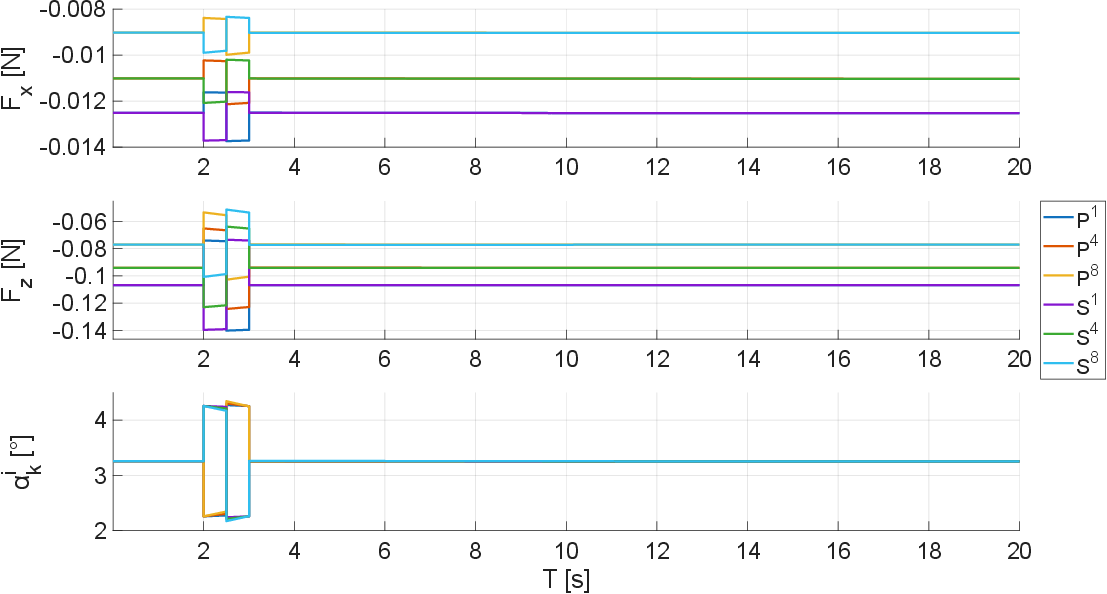
Figure 10: Cruise mode changing the roll angle with joint actuators shown on individual segments.
Differential thruster inputs induced yaw, highlighting the absence of inherent yaw stability in the flying wing (unswept, untwisted), and causing a secondary roll moment via spanwise lift differential (Figure 11, Figure 12).
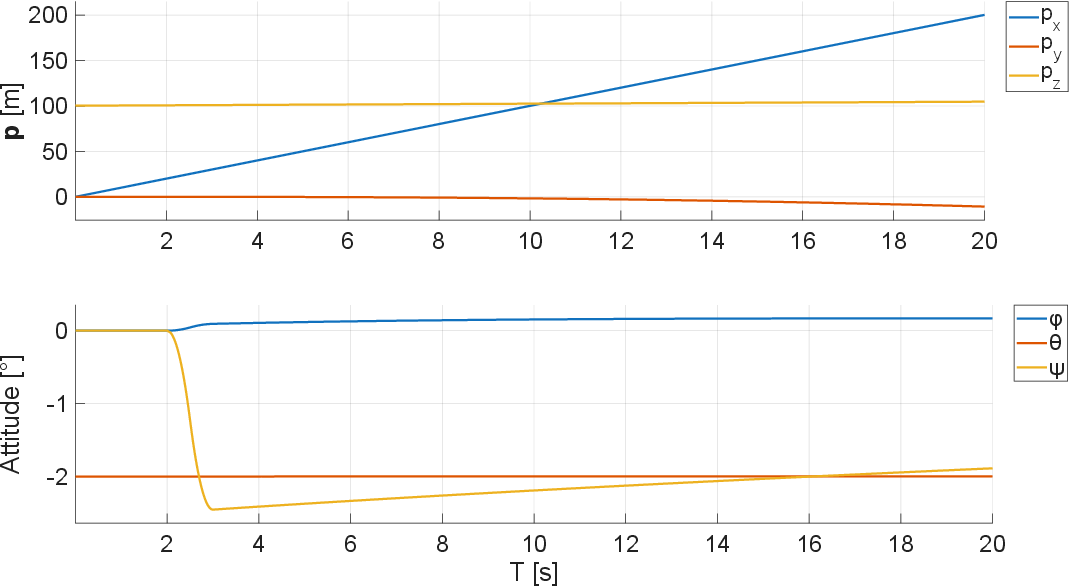
Figure 11: Cruise mode changing the yaw angle with thrusters in the body frame (FB).
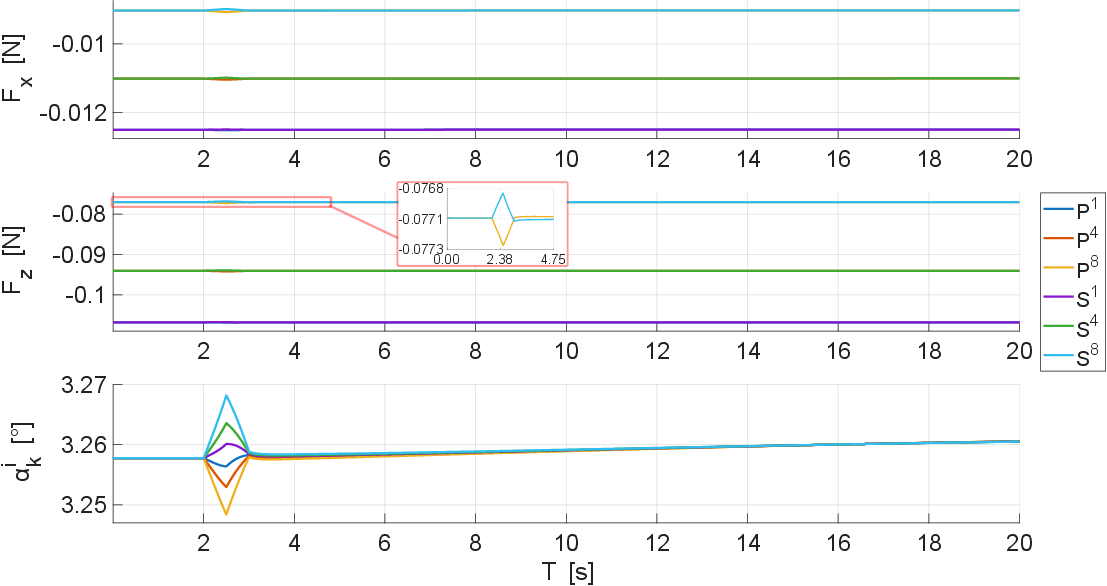
Figure 12: Cruise mode changing the yaw angle with thrusters shown on individual segments.
Strong numerical results: The model exhibits predictable behavior across steady-state transitions and open-loop responses; segment-level force distributions and moment generation agree with theoretical aerodynamic expectations for morphing UAVs.
Theoretical and Practical Implications
MetaMorpher’s nonlinear segmented modeling offers a unified simulation environment for evaluating metamorphic flight—that is, variable force distributions, actuator allocations, and airfoil profiles—prior to physical prototyping. It sets a foundation for advanced control strategies for mode transition and morphing, especially in environments demanding rapid configuration changes. The open-source Simulink model encourages reproducibility and rapid community-driven design iteration.
On a theoretical level, this framework supports research in structural nonlinearities, aerodynamic optimization, and control allocation for morphing aerial platforms. Its modularity facilitates integration with high-fidelity sensor models and adaptive controllers for real-time mode switching.
Contradictory claim: Unlike prior rigid-body simplifications, the segmented approach provides local aerodynamic fidelity, enabling analysis of regimes that would otherwise elude simplified global models.
Future Directions
Planned work involves experimental validation with a physical MetaMorpher, refined aerodynamic parameter identification, BLDC thruster modeling, control surface integration, and development of adaptive morphing control strategies. The model’s flexibility supports further research into bio-inspired flight, trajectory optimization in hybrid aerial vehicles, and real-world deployment for environmental and infrastructure monitoring.
Conclusion
This paper delivers an integrated mechanical design and nonlinear aerodynamic model for the MetaMorpher hybrid UAV, capable of robust simulation of rotary and fixed-wing flight and transition regimes. By advancing segmented aerodynamic modeling and enabling rapid parametric analysis, the work provides both theoretical insights and practical tools for the design and optimization of next-generation metamorphic UAVs (2603.29646).