Flying-Point-Free Depth: A Mixture-Density Solution to Ambiguity
This presentation explores a fundamental problem in depth estimation: flying points that contaminate 3D geometry at object boundaries. The talk reveals how modern depth estimators fail at ambiguous regions by forcing unimodal predictions, then introduces a probabilistic mixture-density architecture that resolves this issue by representing multiple depth hypotheses per pixel. We examine the empirical evidence showing dramatic improvements in boundary localization, robustness to blur, and natural handling of transparent objects and sky regions—all with negligible computational overhead.Script
State-of-the-art depth estimators produce spurious geometry at every object boundary—floating points that contaminate 3D reconstructions and break downstream perception. These flying points aren't implementation bugs; they're the inevitable consequence of forcing every pixel to commit to a single depth value.
The problem is architectural. At occlusion boundaries, a pixel's receptive field captures evidence for both foreground and background surfaces. Standard models average these competing signals under regression loss, predicting depths that fall into the empty space between real surfaces—exactly where flying points appear.
The solution is a mixture-density architecture that gives each pixel multiple depth hypotheses with associated confidences. The loss is derived as the negative log-likelihood of a mixture distribution, so heads naturally specialize—one captures foreground, another background. At inference, selecting the most likely component locks the prediction to a real surface, never an interpolated flying point.
The empirical results are striking. On NRGBD, boundary accuracy improves from 57 millimeters to 25 millimeters—a 56 percent reduction in error. The model runs 80 times faster than diffusion refinement methods, maintaining real-time performance while completely eliminating flying-point artifacts at occlusion boundaries.
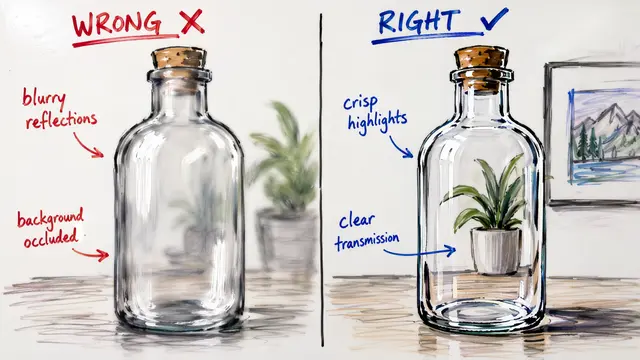
The mixture representation generalizes naturally to other ambiguities. For transparent objects, multiple components activate simultaneously, predicting both visible and occluded depth layers without any architectural redesign. For sky regions, an additional fixed component at infinite depth enables threshold-free segmentation, eliminating skyline artifacts that plague standard models.
By modeling depth as inherently multimodal at ambiguous pixels, this work delivers principled, efficient, flying-point-free estimation that's compatible with any existing backbone. The implications extend beyond depth to any dense prediction task facing boundary ambiguity. Visit EmergentMind.com to explore this paper in depth and generate your own video explainers for the research that matters to you.