LERF: Language Embedded Radiance Fields
This presentation explores a groundbreaking approach that enables natural language interaction with 3D scenes by embedding CLIP language models into Neural Radiance Fields. The research demonstrates how multi-scale language embeddings can be volumetrically rendered to ground open-vocabulary queries in photorealistic 3D reconstructions, outperforming existing methods on diverse real-world scenes without requiring fine-tuning or labeled datasets.Script
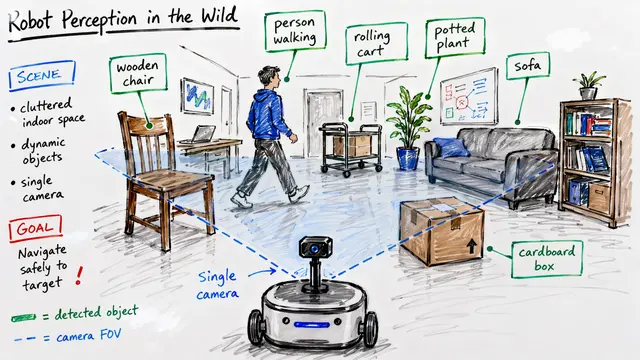
Imagine pointing at any object in a 3D scene and asking for it using everyday language, even if that object has never been labeled in a dataset. The authors of this paper make that vision a reality by embedding language understanding directly into photorealistic 3D reconstructions.
Building on that vision, let's examine the fundamental problem they set out to solve.
Traditional Neural Radiance Fields excel at reconstructing beautiful 3D scenes, but they can't understand what they're showing. The researchers identified that connecting human language to these geometric representations required a fundamentally new approach, one that wouldn't be constrained by pre-defined object categories.
So how did the authors bridge this gap between language and 3D geometry?
The key insight is treating language embeddings as another property of 3D space, just like color or density. They arrange CLIP embeddings into a volumetric field that can be queried at any position and scale, then optimize this field by supervising it with embeddings from image crops across multiple training views.
This diagram reveals the elegance of their approach. For any ray through the scene, they sample the language field at multiple points and scales, then combine those samples using volumetric rendering weights to produce a final CLIP embedding. The physical scale in 3D space directly corresponds to the crop scale in the image, creating a natural connection between spatial extent and semantic granularity.
Two critical design choices make this work. First, they deliberately separate language embeddings from the standard NeRF outputs, ensuring that adding semantic understanding doesn't compromise the geometric accuracy. Second, they employ DINO features as a regularization signal, which helps create smooth, coherent semantic regions throughout the 3D space.
These architectural innovations translate into impressive real-world performance.
Across diverse in-the-wild scenes, LERF consistently outperformed competing methods. Remarkably, it handled not just common objects but also abstract queries like electricity and long-tail items rarely seen in training data, showcasing true open-vocabulary understanding in 3D space.
The authors transparently show where LERF struggles. It can confuse visually similar objects, like activating on green vegetables when searching for zucchini, or mistaking a green plastic chair for a leaf. Additionally, it has difficulty with global spatial reasoning, sometimes only highlighting table edges rather than the entire surface. These limitations point toward important future research directions.
LERF demonstrates that we can ground natural language in photorealistic 3D reconstructions without labeled data, opening new possibilities for intuitive human-robot interaction and immersive virtual environments. To explore this work further and discover more cutting-edge research, visit EmergentMind.com.