- The paper presents a modular framework that leverages language models and symbolic lifting to iteratively refine mechanical linkage designs.
- It separates discrete topology selection from continuous parameter optimization using a symbolic feedback loop, reducing Chamfer distance error by 23.8% on average.
- The approach enhances geometric accuracy and structural validity, achieving up to 68% reduction in error and a 134% increase in deployable designs.
LLMs for Reflective Mechanical Linkage Synthesis via Symbolic Lifting and Modular Optimisation
Introduction
This work introduces a modular framework that leverages LLMs for mechanical linkage design, addressing the challenging synthesis of mechanisms whose end-effector trajectories closely match target curves. The central premise is the factorization of the linkage design problem into discrete combinatorial topology selection, managed by LLM agents, and continuous parameter optimization, handled by numerical methods. The critical enabler of this division is a symbolic lifting operator that bridges high-dimensional simulation data and LLM-compatible qualitative representations. This symbolic feedback closes the design loop, enabling LLM-driven multi-agent pipelines to perform reflective refinement of candidate linkage designs.
Symbolic Lifting and Closed-Loop Synthesis Framework
The framework is characterized by a multi-agent architecture where discrete topology proposals and structural critiques are iteratively refined through symbolic representations. The symbolic lifting operator, denoted L, abstracts dense simulation traces into a compact representation bundle R comprising motion labels, temporal predicates, and diagnostics on mechanism constraint satisfaction. This representation is consumed by LLM agent chains (proposer, critic, planner, and refiner), allowing for reasoning-driven modifications of the mechanism topology rather than blind search.
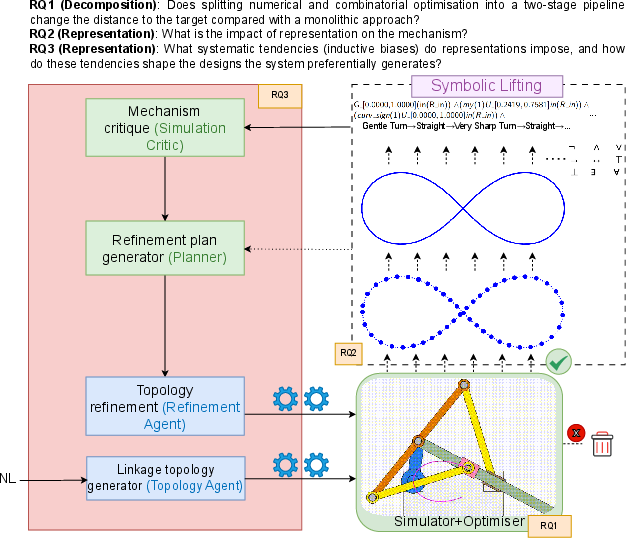
Figure 1: Overview of the symbolic lifting and closed-loop synthesis pipeline. Candidate linkage topologies proposed by LLM agents are simulated and optimised to produce continuous end-effector trajectories. The symbolic lifting operator L compresses these outputs into the representation bundle R, enabling iterative reflective refinement.
This pipeline explicitly separates discrete and continuous domains, exploiting the combinatorial expressivity of LLMs for topology exploration while guaranteeing geometric fidelity through numerical solvers. The bridging is not merely an interface: symbolic feedback is essential for engineering-valid designs, especially in handling constraint violations such as over/underconstraint, which are diagnosed and remediated at the symbolic level.
Empirical Analysis of Symbolic Feedback-Driven Reasoning
Quantitative and qualitative experiments across three open-source model families (Llama3.3 70B, Qwen3 4B, Qwen3 MoE 30B-A3B) and six canonical shape targets (including NACA airfoil, lemniscate, and ellipse) establish that symbolic lifting provides a scaffold for systematic improvement. Monotonic reduction in geometric error is observed in 78.6% of refinement trajectories, with average per-trajectory improvement of 23.8% in Chamfer distance.
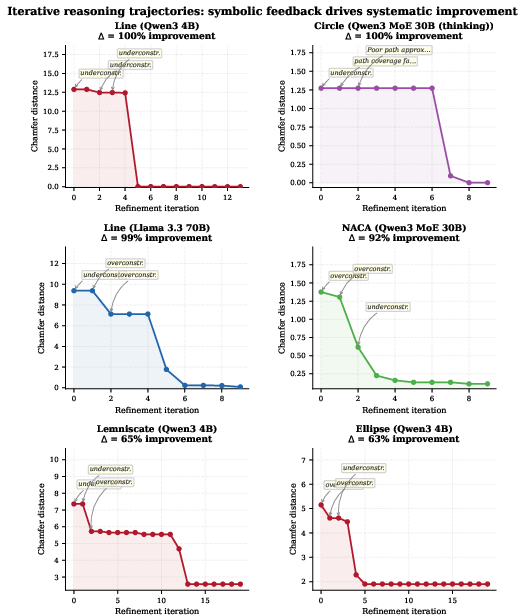
Figure 2: Representative reasoning-driven improvement trajectories across model/shape combinations, with consistent downward trend in Chamfer distance. Symbolic feedback enables cumulative, directed improvement, rather than stochastic perturbation.
Detailed analyses of reasoning chains reveal that agents ground their actions in mechanical semantics—distinguishing between overconstraint (e.g., redundant loops precluding motion) and underconstraint (e.g., insufficient DOF preventing desired trajectory complexity)—and select appropriate corrective actions accordingly. This behavior is robust across model scale and architecture due to the common symbolic interface.
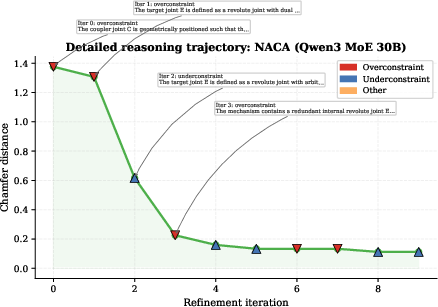
Figure 3: Detailed reasoning trajectory showing translation from raw simulation output to symbolic abstraction, failure diagnosis, and resulting topological refinement. The process is transparent and mechanically interpretable.
Geometric, Structural, and Semantic Fidelity
Modular design with symbolic lifting yields substantial improvements in geometric accuracy. The modular pipeline achieves up to 68% reduction in Chamfer distance compared to monolithic LLM baselines that do not factorize topology and parameter optimization. Structural validity, defined as the syntactic and kinematic correctness of mechanisms in simulation, increases by up to 134%, converting failure cases into deployable designs.
The convergence characteristics of the modular pipeline indicate accelerated attainment of low-error plateaus, highlighting the advantage of symbolic initialization for the numerical optimizer.
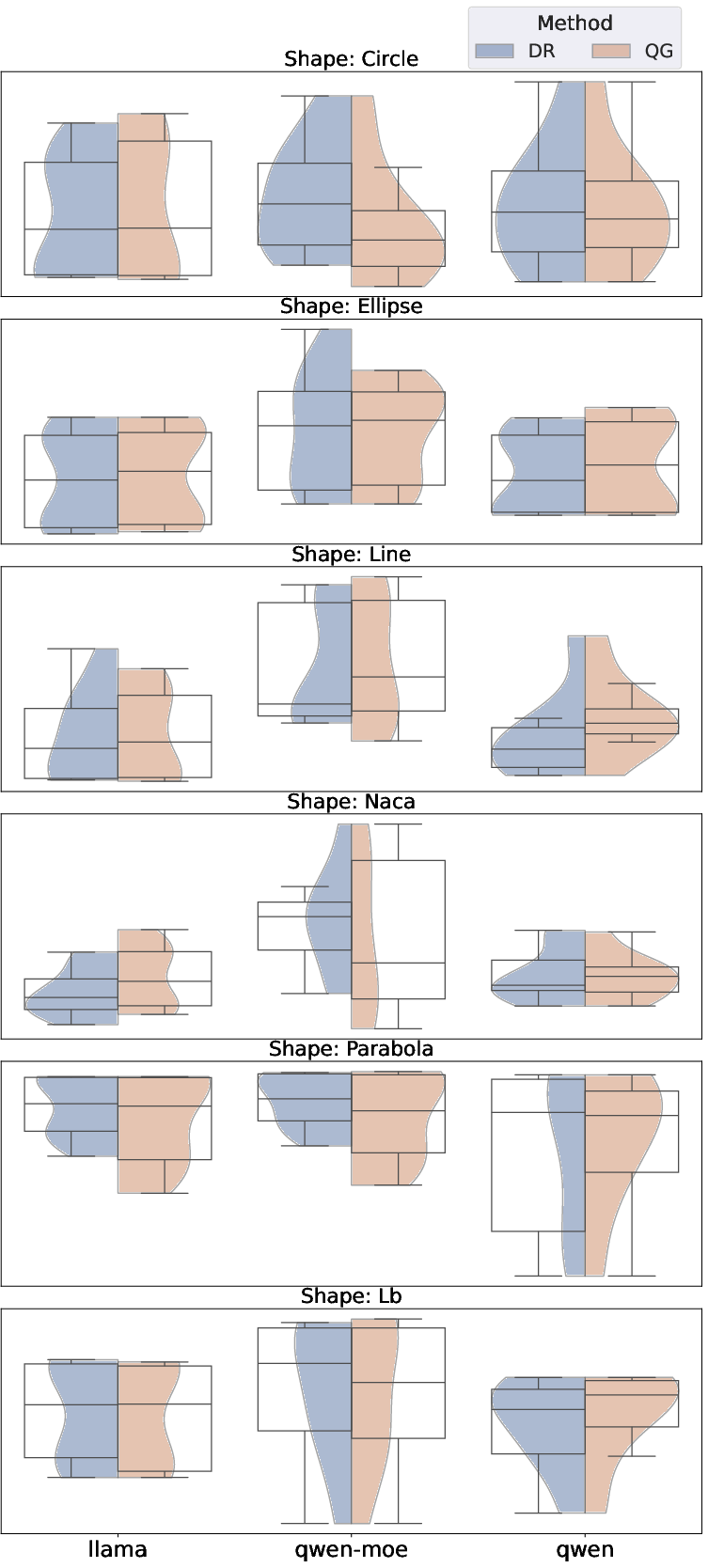
Figure 4: Distribution of best Chamfer distances by model and representation method, highlighting variance reduction and improved performance when symbolic representations are provided.
Inter-model variance in performance markedly decreases with symbolic feedback; all architectures under symbolic lifting converge to similar error distributions, confirming that representational abstraction, rather than model scale, determines downstream design quality.
Linkages generated by the system approximate complex engineering trajectories with both global fidelity and preservation of local features, including high-curvature segments and nontrivial self-intersections (e.g., lemniscates).
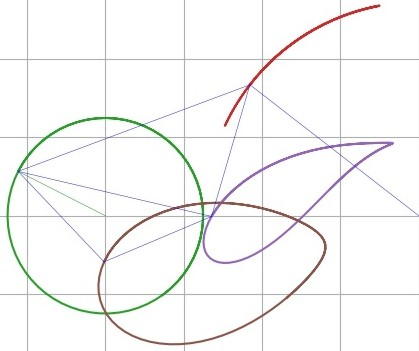
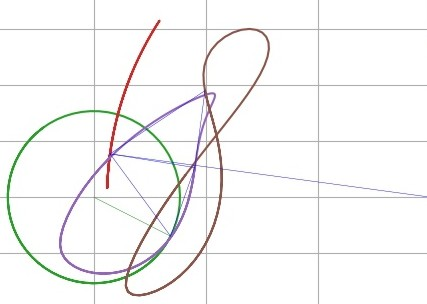
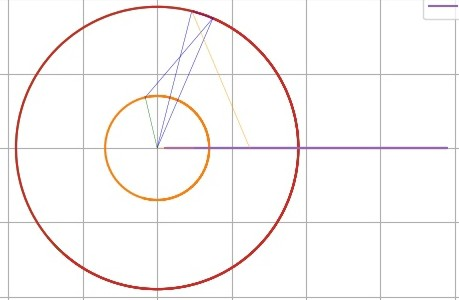
Figure 5: NACA airfoil approximation produced by a 6-bar linkage (Qwen-MoE), demonstrating the reproduction of subtle parametric features such as leading-edge curvature.
This demonstrates the method's ability to tackle design requirements directly relevant to practical mechanism design in engineering, robotics, and manufacturing.
Implications and Future Directions
The results underscore that interpretable symbolic abstraction serves dual roles: as a computational bridge between LLMs and physics-grounded solvers, and as an audit-friendly explanation layer for engineering workflows. The architecture is domain-agnostic and can generalize to other structural, compliant, or robotic design problems requiring joint discrete-continuous optimization.
Potential extensions include:
- Generalization to spatial (3D) mechanisms, necessitating richer symbolic vocabularies and solvers.
- Integration with physics-informed neural networks as surrogate simulators.
- Human-in-the-loop workflows using the symbolic representation as an engineer–AI communication protocol.
- Formal explainability studies leveraging symbolic traces as design rationales.
Conclusion
This research articulates a modular, symbolically-augmented approach for leveraging LLMs in the conceptual and structural synthesis of mechanical linkages. By implementing a closed-loop, reasoning-driven, and verifiable workflow, it demonstrates systematic, interpretable improvement across heterogeneous AI models and diverse engineering targets. The symbolic lifting operator is pivotal, enabling both cross-architecture robustness and engineering-valid designs, and providing a template for future AI-assisted co-design systems at the intersection of language, reasoning, and engineering.